
Fuzzy Logic-Based Decision-Making Method for Ultra-Large Ship Berthing Using Pilotage Data

Abstract
:1. Introduction
2. Methodology for Decision-Making Model
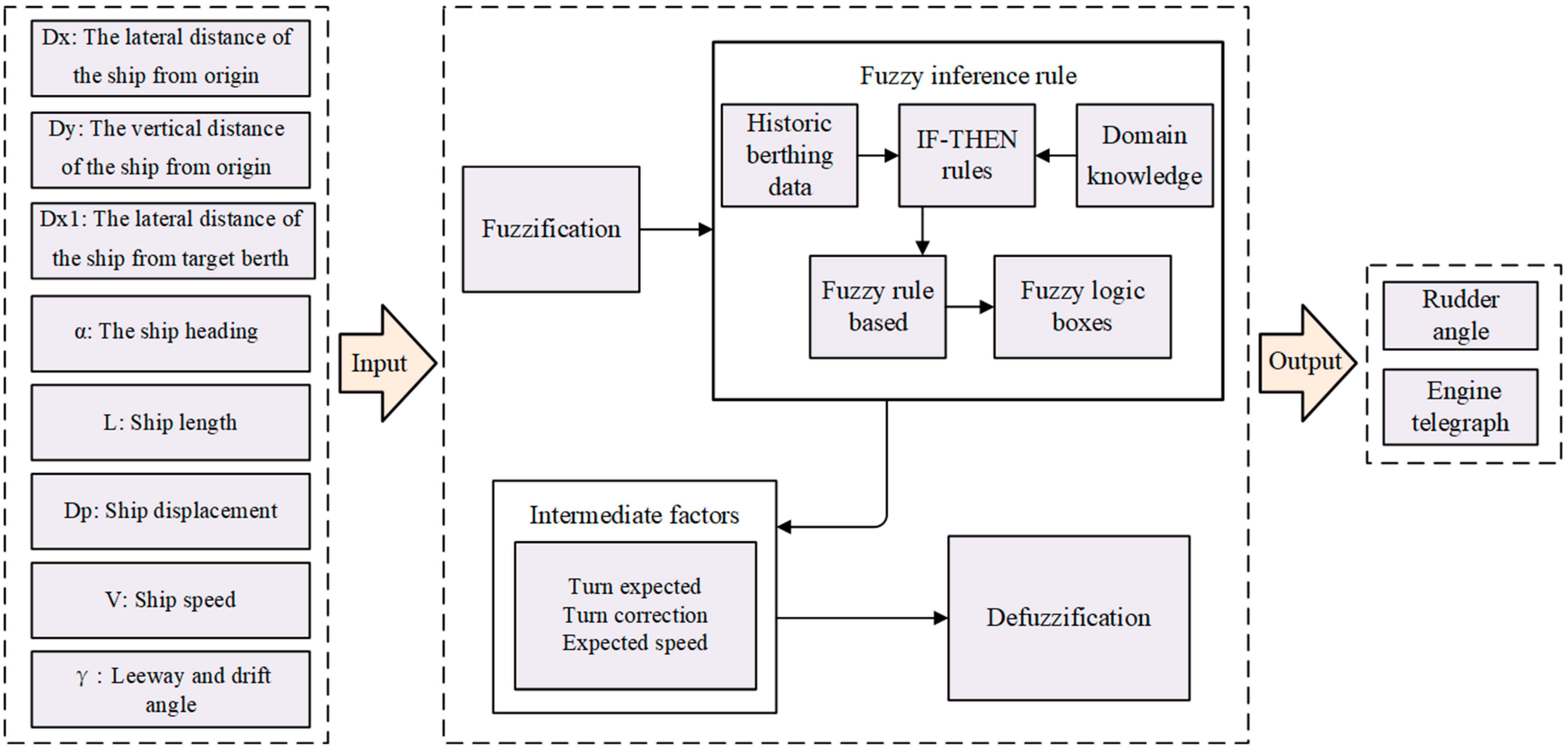
2.1. Establish the Fuzzy Logic-Based Decision-Making Model
2.2. Identify the Influencing Factors by Analyzing Ship Berthing Condition
- (1)
- Dx: The lateral distance of the ship from the origin. The ship should not be close to the wharf because a short distance will cause collisions between the ship and the wharf. If the value of Dx is large, the time to start turning should be earlier, and the helm order should be larger than usual to avoid the danger of colliding.
- (2)
- Dy: The vertical distance between the ship and the origin. When the ship approaches the berth, the ship should adjust its position and speed. Dy is a key parameter to determine the timing for adjusting the position and speed. If the value of Dy is large, the time to start turning should be later than usual, and the helm order should change smoothly to improve the safety of ship berthing.
- (3)
- Dx1: The lateral distance of the ship from the target berth. This factor determines the timing of berthing. If the value of Dx1 is large, the ship speed should decrease slowly during the berthing process to improve the efficiency and economy of ships and ports.
- (1)
- α: The ship heading (under the established coordinate system). α determines whether the ship has enough space to adjust to a suitable berthing position. During the berthing process, α is changed by a change in the ship’s position, and the pilot should adjust the angle according to the actual situation. Traditionally, α is a large angle, even close to a right angle, before turning, and it will be gradually decreased owing to the adjusting of the pilot, and finally, it will be close to the front line of the wharf. This factor and location factors should be considered to determine the helm orders and time to start turning. If the ship approaches the berth and α is still large, a large rudder angle should be ordered to adjust the ship course to a reasonable range.
- (2)
- V: Ship speed. The ship speed of berthing is relatively low compared to navigation. During the berthing process, if the speed is high, there will be little time to adjust the ship heading. If the speed is slow, it will be difficult for the ship to maintain the rudder efficiency. Ship speed is determined by the engine telegraph, which reflects the effect of the speed decision obtained by the proposed model. It is a significant indicator for assessing the decision-making model.
- (3)
- Dp and L: Ship displacement and ship length. The size of the ship influences the maneuverability of the ship. Traditionally, the turning indices of small-sized ships are larger than those of large-sized ships, which indicates that the turning circle of small-sized ships is smaller than that of large-sized ships. Note that this paper focuses on ultra-large ships, which is less influenced by the wind and current compared with small-sized ships. The established decision-making model may be different from small-sized ships.
- (4)
- Leeway and drift angle. This is an angle between the course over ground and the true course caused by the wind and current. The wind and waves are major constrains during the berthing process, which are reflected by the leeway and drift angle in the fuzzy logic framework of the decision-making model.
2.3. Fuzzify the Influencing Factors for Decision Making of Ship Berthing
- (1)
- Input factors for decision-making model
- (2)
- Intermediate factors for decision-making model
- (3)
- Output factors for decision-making model
- (4)
- Fuzzy membership functions of the linguistic terms established
2.4. Establish the Fuzzy Rule-Based Pilotage Data and Experts’ Knowledge
2.5. Defuzzify the Outputs
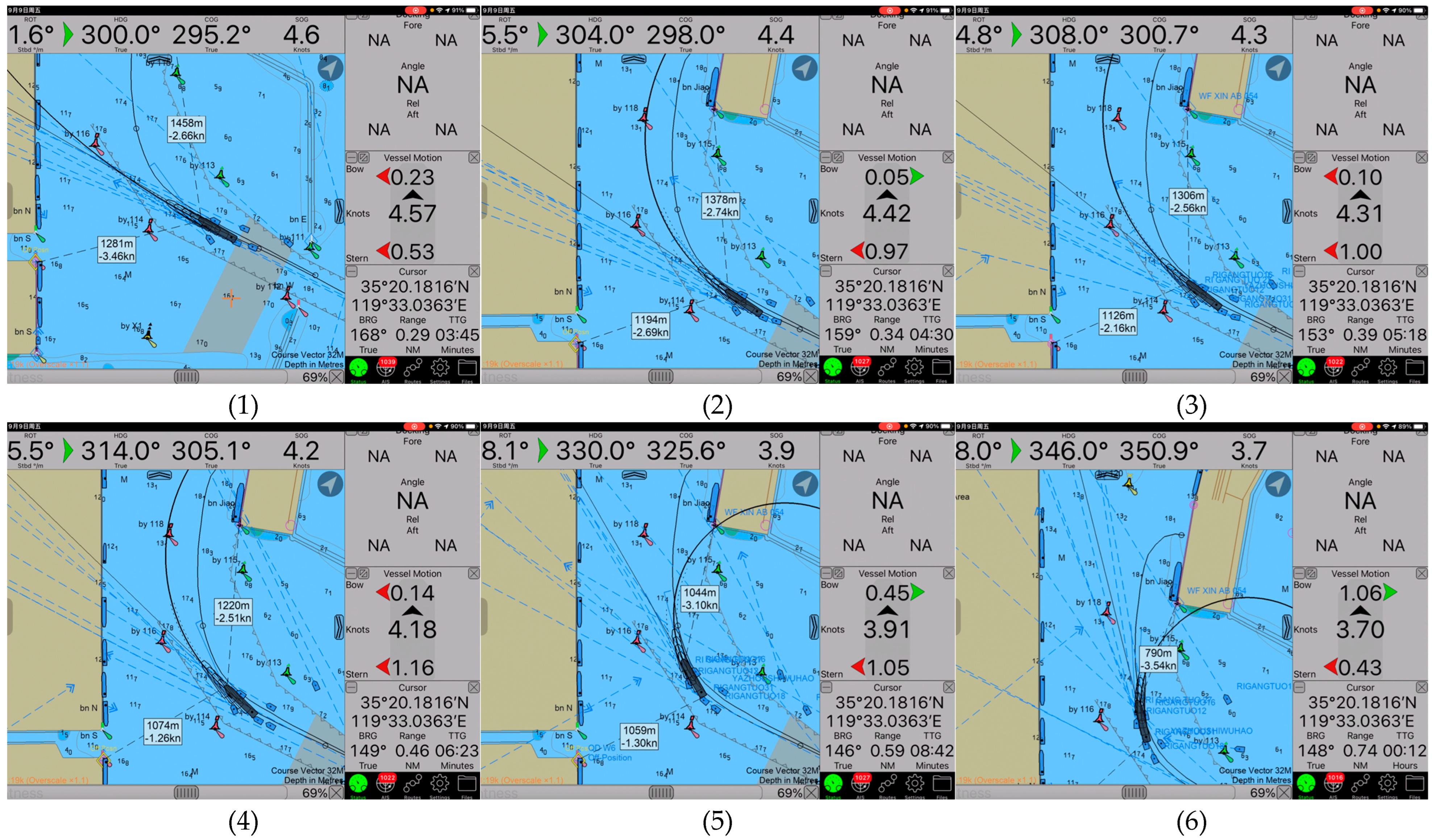
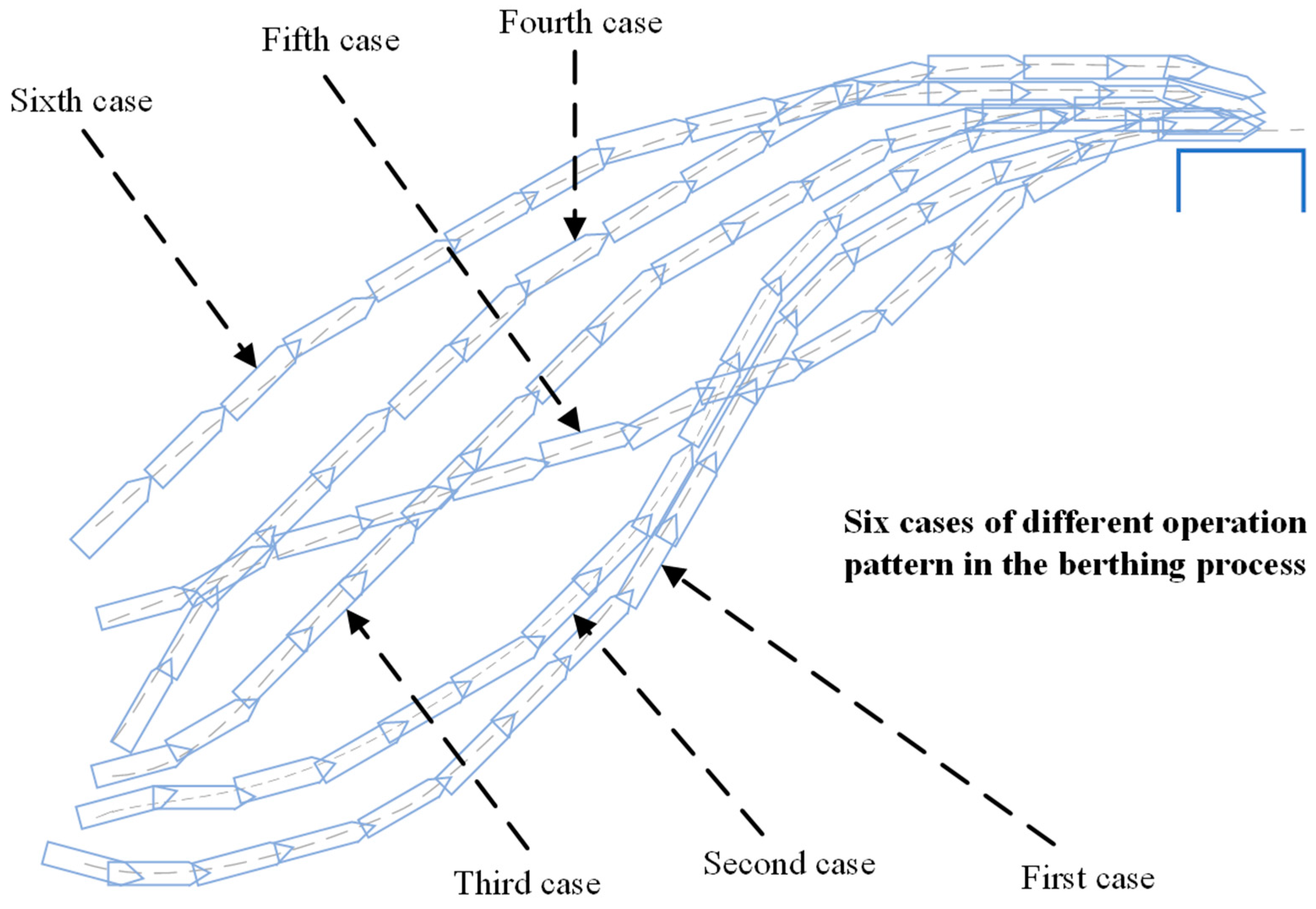
3. Application of the Proposed Model for Ultra-Large Ship Berthing
3.1. Derive the Pilotage Data in Real Ship Berthing Process
3.2. Derive the Decision-Making Results
3.3. The Error Analysis-Based Decision-Making Results
3.4. The Influence of Turn and Speed Error
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Helgesen, O.K.; Thyri, E.H.; Brekke, E.F.; Stahl, A.; Breivik, M. Experimental validation of camera-based maritime collision avoidance for autonomous urban passenger ferries. Model. Identif. Control 2023, 44, 55–68. [Google Scholar] [CrossRef]
- O’Born, R.; Brattebo, H.; Iversen OM, K.; Miliutenko, S.; Potting, J. Quantifying energy demand and greenhouse gas emissions of road infrastructure projects: An LCA case study of the Oslo fjord crossing in Norway. Eur. J. Transp. Infrastruct. Res. 2016, 16, 445–466. [Google Scholar] [CrossRef]
- Scholler FE, T.; Nalpantidis, L.; Blanke, M. Buoy Light Pattern Classification for Autonomous Ship Navigation Using Recurrent Neural Networks. IEEE Trans. Intell. Transp. Syst. 2022, 23, 9455–9465. [Google Scholar] [CrossRef]
- Nomura, Y.; Yamamoto, S.; Hashimoto, T. Study of 3D measurement of ships using dense stereo vision: Towards application in automatic berthing systems. J. Mar. Sci. Technol. 2021, 26, 573–581. [Google Scholar] [CrossRef]
- Yue, T.; Zhang, Y.; Liu, P.; Xu, Y.; Yu, C. A Generating-Anchor Network for Small Ship Detection in SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 7665–7676. [Google Scholar] [CrossRef]
- Gao, X.; Makino, H. Analysis of anchoring ships around coastal industrial complex in a natural disaster. J. Loss Prev. Process Ind. 2017, 50, 355–363. [Google Scholar] [CrossRef]
- Villa-Caro, R.; Carral, J.C.; Fraguela, J.A.; Lopez, M.; Carral, L. A review of ship mooring systems. Brodogradnja 2018, 69, 123–149. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-Constrained Real-time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Ozturk, U.; Akdag, M.; Ayabakan, T. A review of path planning algorithms in maritime autonomous surface ships: Navigation safety perspective. Ocean Eng. 2022, 251, 111010. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, J.; Yan, X.; Soares, C.G. Multi-ship collision avoidance decision-making and coordination mechanism in Mixed Navigation Scenarios. Ocean Eng. 2022, 257, 111666. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Li, L. A collision avoidance decision-making system for autonomous ship based on modified velocity obstacle method. Ocean Eng. 2020, 215, 107910. [Google Scholar]
- Hahn, T.; Damerius, R.; Rethfeldt, C.; Schubert, A.U.; Kurowski, M.; Jeinsch, T. Automated maneuvering using model-based control as key to autonomous shipping. At-Automatisierungstechnik 2022, 70, 456–468. [Google Scholar] [CrossRef]
- Baek, S.; Woo, J. Model Reference Adaptive Control-Based Autonomous Berthing of an Unmanned Surface Vehicle under Environmental Disturbance. Machines 2022, 10, 244. [Google Scholar] [CrossRef]
- Han, S.; Wang, Y.; Wang, L.; He, H. Automatic berthing for an underactuated unmanned surface vehicle: A real-time motion planning approach. Ocean Eng. 2021, 235, 109352. [Google Scholar] [CrossRef]
- Van Suong, N. Investigation on a Novl Support System for Automatic Ship Berthing in Marine Practice. J. Mar. Sci. Eng. 2019, 7, 114. [Google Scholar]
- Han, S.; Wang, L.; Wang, Y. A potential field-based trajectory planning and tracking approach for automatic berthing and COLREGs-compliant collision avoidance. Ocean Eng. 2022, 266, 112877. [Google Scholar] [CrossRef]
- Miyauchi, Y.; Sawada, R.; Akimoto, Y.; Umeda, N.; Maki, A. Optimization on planning of trajectory and control of autonomous berthing and unberthing for the realistic port geometry. Ocean Eng. 2022, 245, 110390. [Google Scholar] [CrossRef]
- Im, N.-K.; Van-Suong, N. Artificial neural network controller for automatic ship berthing using head-up coordinate system. Int. J. Nav. Archit. Ocean Eng. 2018, 10, 235–249. [Google Scholar] [CrossRef]
- Nguyen, V.-S.; Do, V.-C.; Im, N.-K. Development of Automatic Ship Berthing System Using Artificial Neural Network and Distance Measurement System. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 41–49. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhu, G.; Hu, X.; Yang, R. Adaptive neural network auto-berthing control of marine ships. Ocean Eng. 2019, 177, 40–48. [Google Scholar] [CrossRef]
- Maki, A.; Akimoto, Y.; Umeda, N. Application of optimal control theory based on the evolution strategy (CMA-ES) to automatic berthing (part: 2). J. Mar. Sci. Technol. 2021, 26, 835–845. [Google Scholar] [CrossRef]
- Miyauchi, Y.; Maki, A.; Umeda, N.; Rachman, D.M.; Akimoto, Y. System parameter exploration of ship maneuvering model for automatic docking/berthing using CMA-ES. J. Mar. Sci. Technol. 2022, 27, 1065–1083. [Google Scholar] [CrossRef]
- Shimizu, S.; Nishihara, K.; Miyauchi, Y.; Wakita, K.; Suyama, R.; Maki, A.; Shirakawa, S. Automatic berthing using supervised learning and reinforcement learning. Ocean Eng. 2022, 265, 112553. [Google Scholar] [CrossRef]
- Wang, S.; Sun, Z.; Yuan, Q.; Sun, Z.; Wu, Z.; Hsieh, T.-H. Autonomous piloting and berthing based on Long Short Time Memory neural networks and nonlinear model predictive control algorithm. Ocean Eng. 2022, 264, 112269. [Google Scholar] [CrossRef]
- Nguyen, V.-S.; Im, N. Automatic Ship Berthing Based on Fuzzy Logic. Int. J. Fuzzy Log. Intell. Syst. 2019, 19, 163–171. [Google Scholar] [CrossRef]
- Meng, Y.; Zhang, X.; Zhu, J. Parameter identification of ship motion mathematical model based on full-scale trial data. Int. J. Nav. Archit. Ocean Eng. 2022, 14, 100437. [Google Scholar] [CrossRef]
- Zhang, L.; Feng, X.; Wang, L.; Gong, B.; Ai, J. A hybrid ship-motion prediction model based on CNN–MRNN and IADPSO. Ocean Eng. 2024, 299, 117428. [Google Scholar] [CrossRef]
- Wei, Y.; Chen, Z.; Zhao, C.; Chen, X.; He, J.; Zhang, C. A three-stage multi-objective heterogeneous integrated model with decomposition-reconstruction mechanism and adaptive segmentation error correction method for ship motion multi-step prediction. Adv. Eng. Inform. 2023, 56, 101954. [Google Scholar] [CrossRef]
- Li, Y.; Peng, Y.; Zheng, J. Intelligent ship collision avoidance model integrating human thinking experience. Ocean Eng. 2023, 286, 115510. [Google Scholar] [CrossRef]
- Ishikawa, A.; Amagasa, M.; Shiga, T.; Tomizawa, G.; Tatsuta, R.; Mieno, H. The max-min Delphi method and fuzzy Delphi method via fuzzy integration. Fuzzy Sets Syst. 1993, 55, 241–253. [Google Scholar] [CrossRef]
- Xue, J.; Van Gelder PH AJ, M.; Reniers, G.; Papadimitriou, E.; Wu, C. Multi-attribute decision-making method for prioritizing maritime traffic safety influencing factors of autonomous ships’ maneuvering decisions using grey and fuzzy theories. Saf. Sci. 2019, 120, 323–340. [Google Scholar] [CrossRef]
- Zhang, K.; Huang, L.; He, Y.; Wang, B.; Chen, J.; Tian, Y.; Zhao, X. A real-time multi-ship collision avoidance decision-making system for autonomous ships considering ship motion uncertainty. Ocean Eng. 2023, 278, 114205. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Kauffman, A. Introduction a la Theorie des Sous-Emsembles Flous; Masson et Cie Editeurs: Paris, France, 1973. [Google Scholar]
- Gil-Aluja, J. Uncertainty in Business Management. In Fuzzy Sets in the Management of Uncertainty; Studies in Fuzziness and Soft Computing; Springer: Berlin/Heidelberg, Germany, 2004; Volume 145, pp. 11–49. [Google Scholar]
- Gil-Lafuente, A.M. Financial Analysis by Means of Ratios. In Fuzzy Logic in Financial Analysis; Studies in Fuzziness and Soft Computing; Springer: Berlin/Heidelberg, Germany, 2005; Volume 175, pp. 95–116. [Google Scholar]
- Khan, R.U.; Yin, J.; Mustafa, F.S.; Anning, N. Risk assessment for berthing of hazardous cargo vessels using Bayesian networks. Ocean Coast. Manag. 2021, 210, 105673. [Google Scholar] [CrossRef]
- Kuzu, A.C.; Akyuz, E.; Arslan, O. Application of Fuzzy Fault Tree Analysis (FFTA) to maritime industry: A risk analysing of ship mooring operation. Ocean Eng. 2019, 179, 128–134. [Google Scholar] [CrossRef]
- Sokukcu, M.; Sakar, C. Risk analysis of collision accidents during underway STS berthing maneuver through integrating fault tree analysis (FTA) into Bayesian network (BN). Appl. Ocean Res. 2022, 126, 103290. [Google Scholar] [CrossRef]
- Wu, B.; Yip, T.L.; Yan, X.P.; Soares, C.G. Fuzzy logic based approach for ship-bridge collision alert system. Ocean Eng. 2019, 187, 106152. [Google Scholar] [CrossRef]
- Zhao, C.; Yip, T.L.; Wu, B.; Lyu, J. Use of fuzzy fault tree analysis and Bayesian network for occurrence likelihood estimation of navigational accidents in the Qinzhou Port. Ocean Eng. 2022, 263, 112381. [Google Scholar] [CrossRef]
- Wu, B.; Cheng, T.; Yip, T.L.; Wang, Y. Fuzzy logic based dynamic decision-making system for intelligent navigation strategy within inland traffic separation schemes. Ocean Eng. 2020, 197, 106909. [Google Scholar] [CrossRef]
- Wu, B.; Yip, T.L.; Xie, L.; Wang, Y. A fuzzy-MADM based approach for site selection of offshore wind farm in busy waterways in China. Ocean Eng. 2018, 168, 121–132. [Google Scholar] [CrossRef]
- Xue, J.; Chen, Z.J.; Papadimitriou, E.; Wu, C.Z.; Van Gelder, P. Influence of environmental factors on human-like decision-making for intelligent ship. Ocean Eng. 2019, 186, 106060. [Google Scholar] [CrossRef]
- Kawai, H.; Sakamoto, J.; Kim, Y.-B.; Choi, Y. Distance Measurement System Based on Image Sensors for Automatic Berthing of Ships. In Proceedings of the International Conference on Control, Automation and Systems (ICCAS 2010), Gyeonggi, Republic of Korea, 27–30 October 2010; pp. 201–204. [Google Scholar]
- Liu, C.; Mao, Q.; Chu, X.; Xie, S. An Improved A-Star Algorithm Considering Water Current, Traffic Separation and Berthing for Vessel Path Planning. Appl. Sci. 2019, 9, 1057. [Google Scholar] [CrossRef]
- Maki, A.; Maruyama, Y.; Dostal, L.; Sakai, M.; Sawada, R.; Sasa, K.; Umeda, N. Practical method for evaluating wind influence on autonomous ship operations. J. Mar. Sci. Technol. 2022, 27, 1302–1313. [Google Scholar] [CrossRef]
- Piao, Z.; Guo, C.; Sun, S. Research into the Automatic Berthing of Underactuated Unmanned Ships under Wind Loads Based on Experiment and Numerical Analysis. J. Mar. Sci. Eng. 2019, 7, 300. [Google Scholar] [CrossRef]
- Chen, C.; Li, Y. Ship Berthing Information Extraction System Using Three-Dimensional Light Detection and Ranging Data. J. Mar. Sci. Eng. 2021, 9, 747. [Google Scholar] [CrossRef]
- Xiong, Y.; Yu, J.; Tu, Y.; Pan, L.; Zhu, Q.; Mou, J. Research on data driven adaptive berthing method and technology. Ocean Eng. 2021, 222, 108620. [Google Scholar] [CrossRef]
- Lee, H.-T.; Lee, J.-S.; Son, W.-J.; Cho, I.-S. Development of Machine Learning Strategy for Predicting the Risk Range of Ship’s Berthing Velocity. J. Mar. Sci. Eng. 2020, 8, 376. [Google Scholar] [CrossRef]
- Roubos, A.; Groenewegen, L.; Peters, D.J. Berthing velocity of large seagoing vessels in the port of Rotterdam. Mar. Struct. 2017, 51, 202–219. [Google Scholar] [CrossRef]
- Zhou, Y.; Daamen, W.; Vellinga, T.; Hoogendoorn, S.P. Impacts of wind and current on ship behavior in ports and waterways: A quantitative analysis based on AIS data. Ocean Eng. 2020, 213, 107774. [Google Scholar] [CrossRef]
- Hou, L.-X.; Liu, R.; Liu, H.-C.; Jiang, S. Two decades on human reliability analysis: A bibliometric analysis and literature review. Ann. Nucl. Energy 2021, 151, 107969. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inputs | Fuzzified Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| o–far (−6,−2,−1) | o–close (−2,−1,0) | very close (−1,0,2) | close (0,2,4) | normal (2,4,6) | \ | \ | \ | \ | |
| o–far (−3,−2,−1) | o–close (−2,−1,0) | very close (−1,0,1) | close (0,1,1.78) | normal (1,1.78,2.14) | far (1.78,2.14,3) | \ | \ | \ | |
| very close (−1,0,2) | close (0,2,4) | normal (2,4,6) | far (4,6,8) | \ | \ | \ | \ | \ | |
| α | o–small (−30,−15,0) | very small (−15,0,20) | small (0,20,45) | middle (20,45,70) | large (45,70,100) | very large (70,100,110) | \ | \ | \ |
| V | very slow (0,0,1) | slow (0,1,3.2) | normal (1,3.2,4.8) | fast (3.2,4.8,6) | very fast (4.8,6,7) | \ | \ | \ | \ |
| Dp (× 105) | large (−1,0,1,3.5) | very large (1,3.5,5,6) | \ | \ | \ | \ | \ | \ | \ |
| γ | o–very large (−6,−5,−3.75) | o–large (−5,−3.75,−2.5) | o–normal (−3.75,−2.5,−1.25) | o–small (−2.5,−1.25,0) | very small (−1.25,0,1.25) | small (0,1.25,2.5) | normal (1.25,2.5,3.75) | large (2.5,3.75,5) | very large (3.75,5,6) |
| Intermediates | Fuzzified Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Tc | o–most (−1.25,−1,−0.75) | o–more (−1,−0.75,−0.5) | o–normal (−0.75, −0.5,−0.25) | o–little (−0.5,−0.25,0) | no need (−0.25,0,0.25) | little (0,0.25,0.5) | normal (0.25,0.5,0.75) | more (0.5,0.75,1) | most (0.75,1,1.25) |
| Te | o–most (−1.7,−1.02, −0.98,−0.97) | o–normal (−0.69,−0.68, −0.64,−0.63) | o–little (−0.36,−0.35, −0.31,−0.3) | no need (−0.03,−0.02, 0.02,0.03) | little (0.3,0.31, 0.35, 0.36) | normal (0.63,0.64, 0.68, 0.69) | most (0.97,0.98,1,2) | \ | \ |
| Ve | very slow (−2.496,0,1) | slow (0,1,3.2) | normal (1,3.2,4.8) | fast (3.2,4.8,6) | very fast (4.8,6,12) | \ | \ | \ | \ |
| V − Ve | o–very different (−5,−4,−3,−2) | o–similar (−3,−2,−1,0) | same (−1,0,1) | similar (0,1,2,3) | very different (2,3,4,5) | \ | \ | \ | \ |
| Outputs | Fuzzified Values | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Tass | o–most (−51,−30.6,−29.4,−29.1) | o–normal (−20.7,−20.4,−19.2,−18.9) | o–little (−10.8,−10.5, −9.3,−9.0) | no need (−0.9,−0.6, 0.6,0.9) | little (9.0,9.3, 10.5, 10.8) | normal (18.9,19.2, 20.4, 20.7) | most (29.1,29.4, 30.6,51) | \ | \ |
| Sass | o–most (−4,−4,−4,−4) | o–more (−3,−3,−3,−3) | o–normal (−2,−2,−2,−2) | o–little (−1,−1,−1,−1) | no need (0,0,0,0) | little (1,1,1,1) | normal (2,2,2,2) | more (3,3,3,3) | most (4,4,4,4) |
| Experts/Pilots | Weights (θi) | Triangular Fuzzy Numbers of Different Linguistic Terms | ||||
|---|---|---|---|---|---|---|
| O–Far | O–Close | Very Close | Close | Far | ||
| 1 | 0.3 | (−7, −3, −1) | (−3, −1, 0) | (−1, 0, 3) | (0, 2, 4) | (1, 4, 5) |
| 2 | 0.2 | (−5, −2, −1) | (−2, 0, 1) | (−2, −1, 2) | (0, 1, 3) | (2, 5, 7) |
| 3 | 0.3 | (−6, −1, 0) | (−2, −1, 0) | (−1, 0, 2) | (0, 1, 4) | (2, 3, 4) |
| 4 | 0.2 | (−6, −3, −1) | (−2, −1, 1) | (−2, −1, 2) | (0, 2, 3) | (2, 6, 7) |
| Total | 1 | (−6, −2, −1) | (−2, −1, 0) | (−1, 0, 2) | (0, 2, 4) | (2, 4, 6) |
| # | Inputs | Outputs | |||
|---|---|---|---|---|---|
| Rules | α | Te | |||
| 1 | normal | normal | far | large | most |
| 2 | close | normal | normal | very large | o–small |
| 3 | far | close | far | large | most |
| 4 | normal | close | far | large | most |
| 5 | close | close | normal | very large | normal |
| 6 | far | very close | far | middle | normal |
| 7 | normal | very close | far | small | little |
| 8 | close | very close | normal | small | little |
| 9 | o–close | very close | close | small | little |
| 10 | normal | o–far | far | small | normal |
| 11 | very close | o–close | close | very small | no need |
| 12 | very close | o–far | close | very small | normal |
| 13 | very close | o–far | close | o–small | no need |
| … | … | … | … | … | … |
| Variable inputs | ||||||
| Fixed inputs | : very close | : far | α: large | |||
| Value | o–far | o–close | very close | close | far | \ |
| Outputs | normal | normal | little | normal | most | \ |
| Variable inputs | ||||||
| Fixed inputs | : normal | : far | α: large | |||
| Value | o–far | o–close | very close | close | normal | far |
| Outputs | most | most | most | more | normal | little |
| Variable inputs | ||||||
| Fixed inputs | : very close | : o–close | α: middle | |||
| Value | very close | close | normal | far | \ | \ |
| Outputs | most | more | normal | normal | \ | \ |
| Variable inputs | α | |||||
| Fixed inputs | : normal | : close | : far | |||
| Value | o–small | very small | small | normal | large | very large |
| Outputs | o–most | o–more | o–little | little | more | most |
| Number | Time | Dx | Dy | α | γ | V | |
|---|---|---|---|---|---|---|---|
| 1 | 53′36″ | 1273.8 | 702.9 | 1973.4 | 84.8 | −4.8 | 4.57 |
| 2 | 54′33″ | 1247.4 | 580.8 | 1947.0 | 82.4 | −5.0 | 4.42 |
| 3 | 55′24″ | 1211.1 | 488.4 | 1910.7 | 80.2 | −5.0 | 4.31 |
| 4 | 56′26″ | 1168.2 | 336.6 | 1871.1 | 75.0 | −5.0 | 4.18 |
| 5 | 58′23″ | 1036.2 | 145.2 | 1735.8 | 56.0 | 4.5 | 3.91 |
| 6 | 1:00′50″ | 792.0 | 0.0 | 1491.6 | 29.6 | 4.9 | 3.70 |
| 7 | 1:02′38″ | 594.0 | −92.4 | 1293.6 | 22.0 | 5.0 | 3.59 |
| 8 | 1:04′19″ | 409.2 | −148.5 | 1108.8 | 20.0 | 5.0 | 3.60 |
| 9 | 1:07′48″ | 0.0 | −273.9 | 699.6 | 22.0 | 3.3 | 3.70 |
| 10 | 1:12′23″ | −435.6 | −330.0 | 264.0 | 10.4 | 5.0 | 2.29 |
| Number | α | γ | V | Ve | V − Ve | Dp | |||
|---|---|---|---|---|---|---|---|---|---|
| 1 | (normal, 0.93; close, 0.07) | (far, 0.99; normal, 0.01) | (far, 0.99; normal, 0.01) | (large, 0.50; very large, 0.50) | (o–very large, 0.84; o–large, 0.16) | (fast, 0.86; normal, 0.14) | (very fast, 0.44; fast, 0.56) | (o–similar, 0.76; same, 0.24) | (very large, 0.68; large, 0.32) |
| 2 | (normal, 0.89; close, 0.11) | (normal, 0.98; close, 0.02) | (far, 0.95; normal, 0.05) | (large, 0.41; very large, 0.59) | (o–very large, 1.00) | (fast, 0.76; normal, 0.24) | (fast, 0.75; normal, 0.25) | (similar, 0.02; same, 0.98) | |
| 3 | (normal, 0.83; close, 0.17) | (normal, 0.38; close, 0.62) | (far, 0.90; normal, 0.10) | (large, 0.34; very large, 0.66) | (o–very large, 1.00) | (fast, 0.69; normal, 0.31) | (fast, 0.63; normal, 0.37) | (similar, 0.09; same, 0.91) | |
| 4 | (normal, 0.77; close, 0.23) | (normal, 0.02; close, 0.98) | (far, 0.83; normal, 0.17) | (large, 0.16; very large, 0.84) | (o–very large, 1.00) | (fast, 0.61; normal, 0.39) | (fast, 0.50; normal, 0.50) | (similar, 0.18; same, 0.82) | |
| 5 | (normal, 0.51; close, 0.49) | (close, 0.44; very close, 0.56) | (far, 0.63; normal, 0.37) | (middle, 0.56; large, 0.44) | (very large, 0.6; large, 0.4) | (fast, 0.45; normal, 0.55) | (fast, 0.31; normal, 0.69) | (similar, 0.21; same, 0.79) | |
| 6 | (normal, 0.20; close, 0.80) | (very close, 1.00) | (far, 0.26; normal, 0.74) | (small, 0.62; middle, 0.38) | (very large, 0.92; large, 0.08) | (fast, 0.31; normal, 0.69) | (fast, 0.12; normal, 0.88) | (similar, 0.30; same, 0.70) | |
| 7 | (close, 0.90; very close, 0.1) | (very close, 0.72; o–close, 0.28) | (normal, 0.96; close, 0.04) | (small, 0.99; middle, 0.01) | (very large, 1.00) | (fast, 0.24; normal, 0.76) | (fast, 0.04; normal, 0.96) | (similar, 0.32; same, 0.68) | |
| 8 | (close, 0.62; very close, 0.38) | (very close, 0.55; o–close, 0.45) | (normal, 0.68; close, 0.32) | (small, 1.0) | (very large, 1.00) | (fast, 0.24; normal, 0.76) | (normal, 0.87; slow, 0.13) | (similar, 0.68; same, 0.32) | |
| 9 | (very close, 1.00) | (very close, 0.17; o–close, 0.83) | (normal, 0.06; close, 0.94) | (small, 0.99; middle, 0.01) | (large, 0.64; normal, 0.36) | (fast, 0.31; normal, 0.69) | (normal, 0.84; slow, 0.16) | (similar, 0.85; same, 0.15) | |
| 10 | (o–close, 0.68; o–far, 0.32) | (o–close, 1.00) | (close, 0.4; very close, 0.6) | (very small, 0.49; small, 0.51) | (very large, 1.00) | (normal, 0.58; slow, 0.42) | (normal, 0.46; slow, 0.54) | (similar, 0.27; same, 0.73) |
| Number | Treal | V | Te | Tc | Tass | Ve | Sass |
|---|---|---|---|---|---|---|---|
| 1 | 30.0 | 4.57 | 0.821 | 0.848 | 24.7 | 5.33 | 0.0 |
| 2 | 10.0 | 4.42 | 0.387 | 0.915 | 13.2 | 4.40 | 0.0 |
| 3 | 20.0 | 4.31 | 0.488 | 0.915 | 15.9 | 4.22 | 0.0 |
| 4 | 30.0 | 4.18 | 0.803 | 0.913 | 24.4 | 4.00 | 0.0 |
| 5 | 0.0 | 3.91 | 0.458 | −0.796 | 10.0 | 3.70 | 0.0 |
| 6 | −10.0 | 3.70 | 0.097 | −0.875 | 0.0 | 3.40 | 0.0 |
| 7 | 0.0 | 3.59 | 0.088 | −0.915 | −0.4 | 3.27 | 0.0 |
| 8 | 10.0 | 3.60 | 0.014 | −0.915 | −2.4 | 2.92 | −1.0 |
| 9 | 0.0 | 3.70 | 0.240 | −0.653 | 4.5 | 2.85 | −1.0 |
| 10 | 0.0 | 2.29 | 0.138 | −0.912 | −1.0 | 2.02 | 0.0 |
| Number | Δt | ||||||
|---|---|---|---|---|---|---|---|
| 1 | 57 | 5.28 | 0.76 | 5.61 | 0.368 | 2.28% | 9.61% |
| 2 | 53 | 3.18 | 0.02 | ||||
| 3 | 58 | 4.08 | 0.09 | ||||
| 4 | 117 | 5.58 | 0.18 | ||||
| 5 | 147 | 10.00 | 0.21 | ||||
| 6 | 108 | 10.00 | 0.30 | ||||
| 7 | 101 | 0.36 | 0.32 | ||||
| 8 | 209 | 12.36 | 0.68 | ||||
| 9 | 275 | 4.53 | 0.85 | ||||
| 10 | / | 0.99 | 0.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Song, G.; Yip, T.-L.; Yeo, G.-T. Fuzzy Logic-Based Decision-Making Method for Ultra-Large Ship Berthing Using Pilotage Data. J. Mar. Sci. Eng. 2024, 12, 717. https://doi.org/10.3390/jmse12050717
Li Y, Song G, Yip T-L, Yeo G-T. Fuzzy Logic-Based Decision-Making Method for Ultra-Large Ship Berthing Using Pilotage Data. Journal of Marine Science and Engineering. 2024; 12(5):717. https://doi.org/10.3390/jmse12050717
Chicago/Turabian StyleLi, Yibo, Guobin Song, Tsz-Leung Yip, and Gi-Tae Yeo. 2024. "Fuzzy Logic-Based Decision-Making Method for Ultra-Large Ship Berthing Using Pilotage Data" Journal of Marine Science and Engineering 12, no. 5: 717. https://doi.org/10.3390/jmse12050717