
A Framework for Structural Analysis of Icebreakers during Ramming of First-Year Ice Ridges

 ,
,
Abstract
:1. Introduction
2. The Proposed Framework
3. The Interaction between Ship and First-Year Ice Ridge
3.1. Select the Interaction Scenario
3.1.1. The Adopted Ship Structure
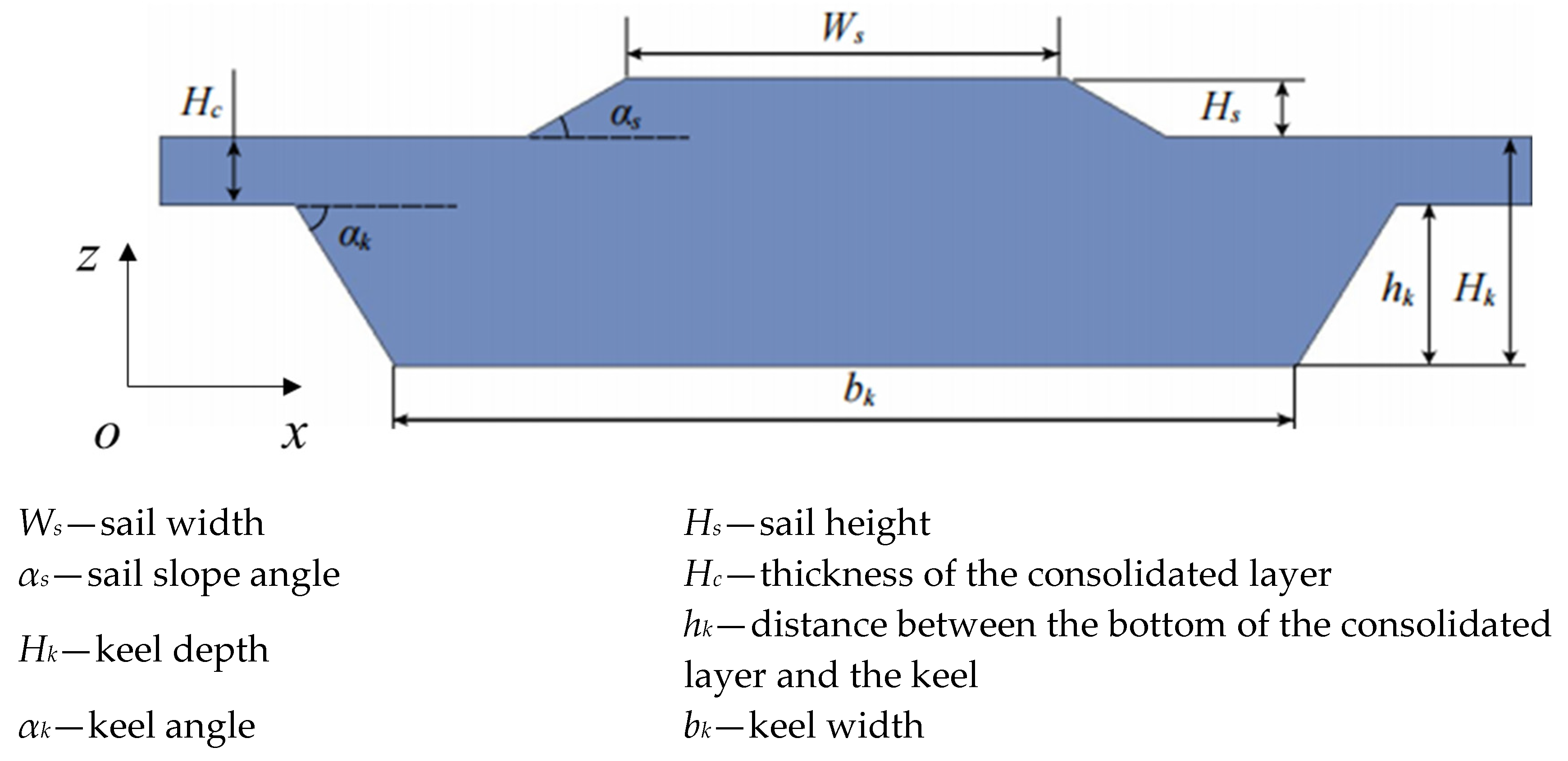
3.1.2. The Morphology and Main Dimensions of First-Year Ice Ridges
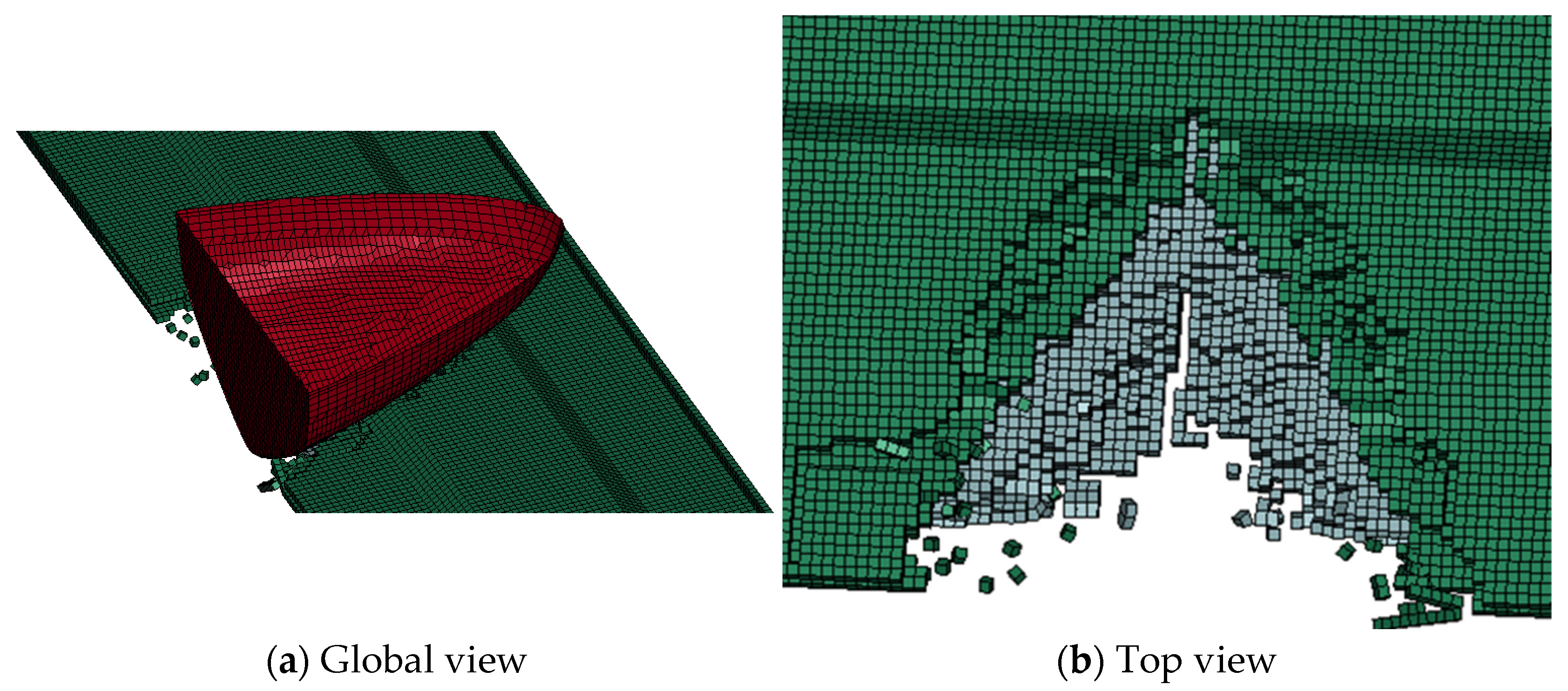
3.2. The Ship–Ridge Interaction Model
3.2.1. The Numerical Models for Ice Ridge
3.2.2. The Numerical Setup for Ship–Ridge Interaction
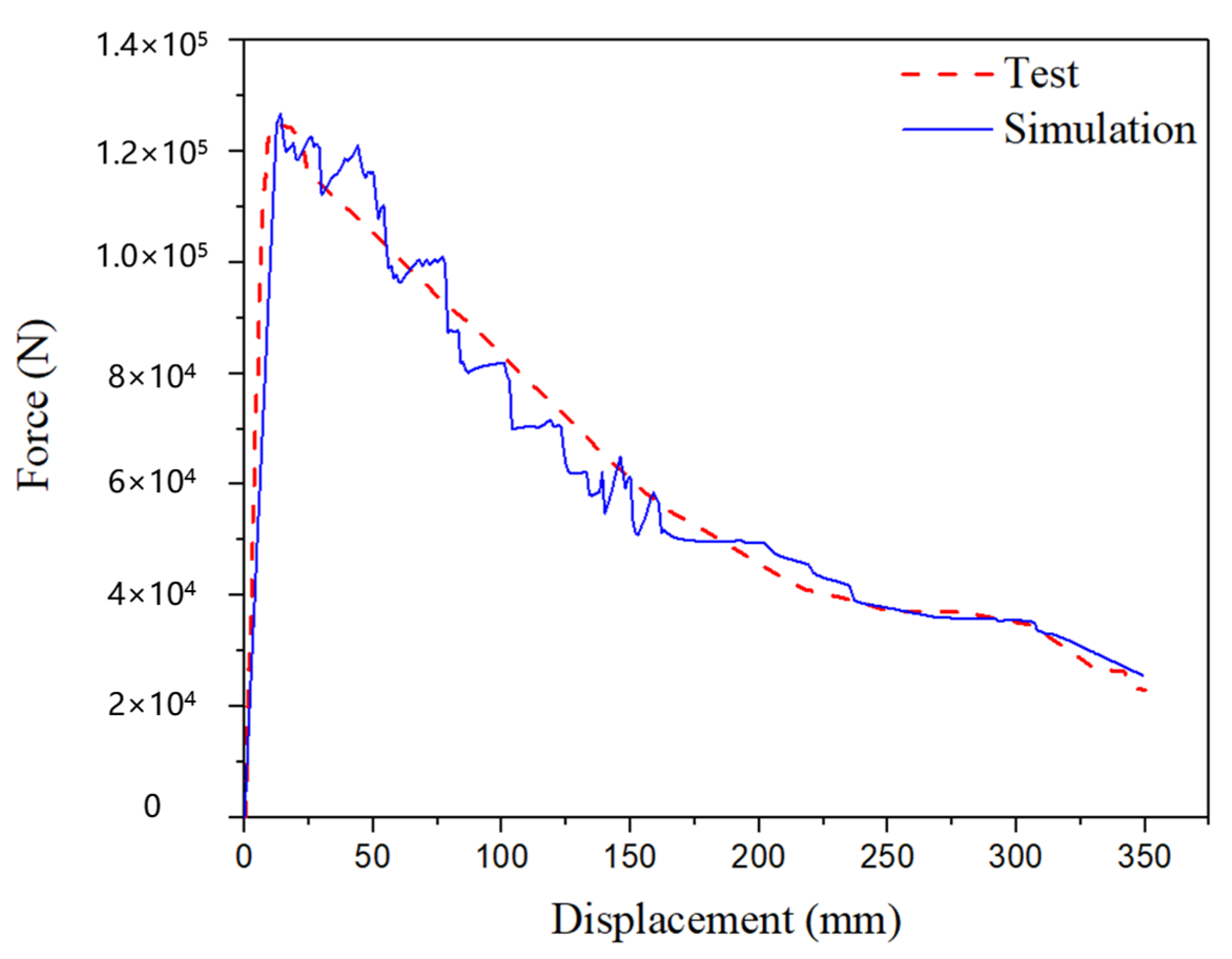
3.3. The Validation of Ship–Ridge Interaction Model
4. Local Loads and Structural Response
4.1. Local Models for the Structural Analysis
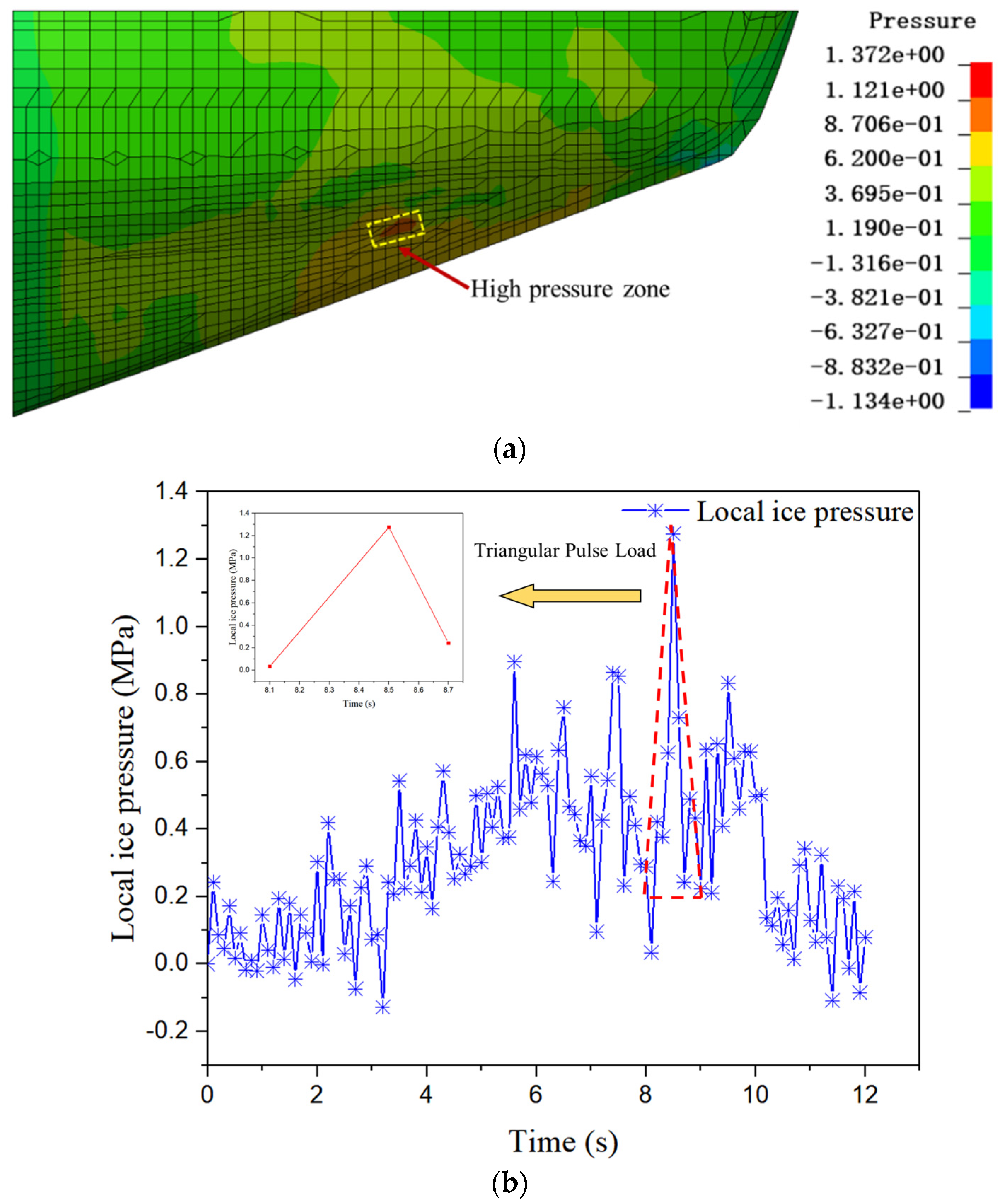
4.2. The Applied Ice Pressure on Local Ship Structures
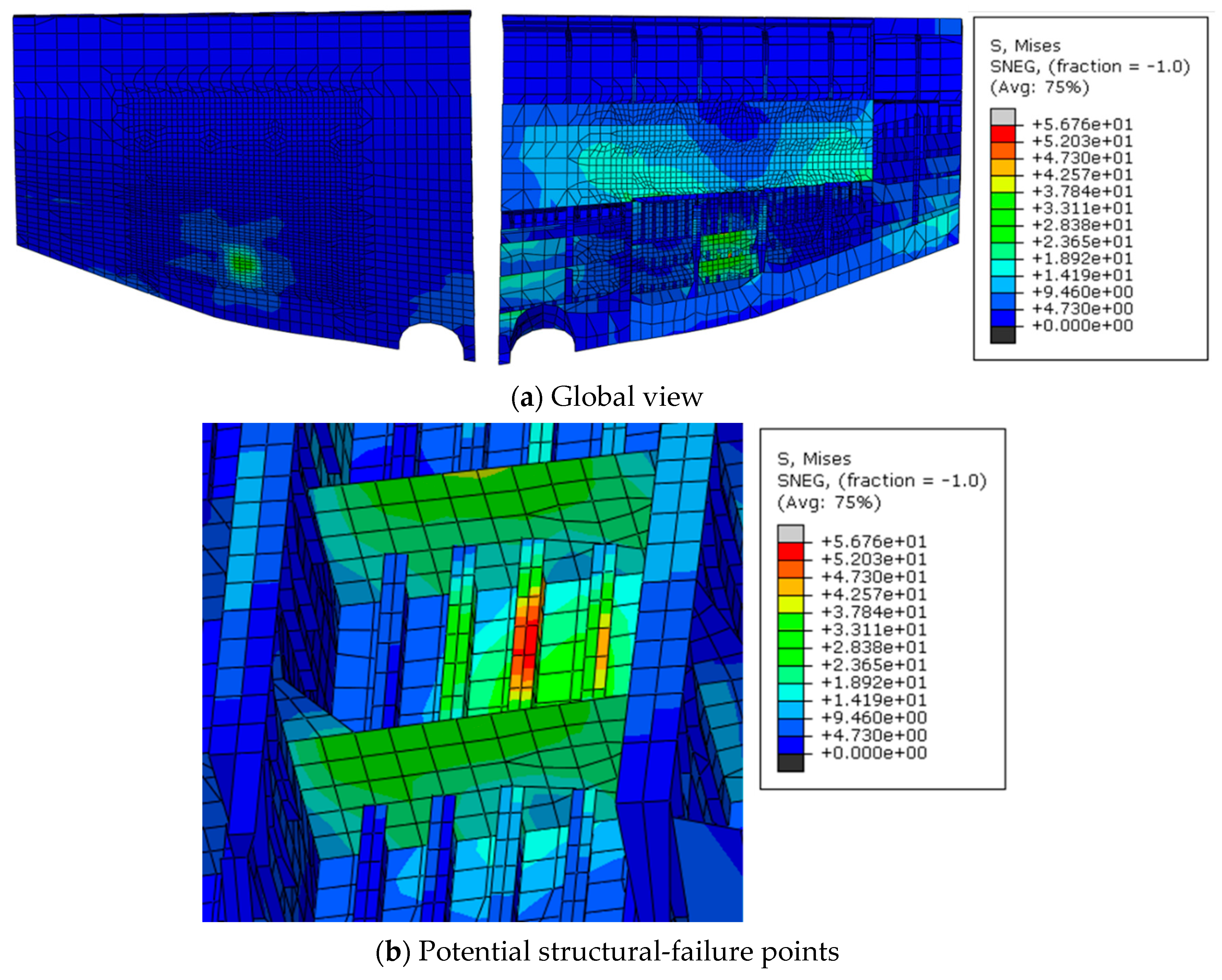
4.3. The Structural Analysis of Local Ship Structures
4.3.1. The Design Ice Pressure Based on Ship–Ridge Interaction
4.3.2. The Ice Pressure under Dangerous Scenario
5. Discussion
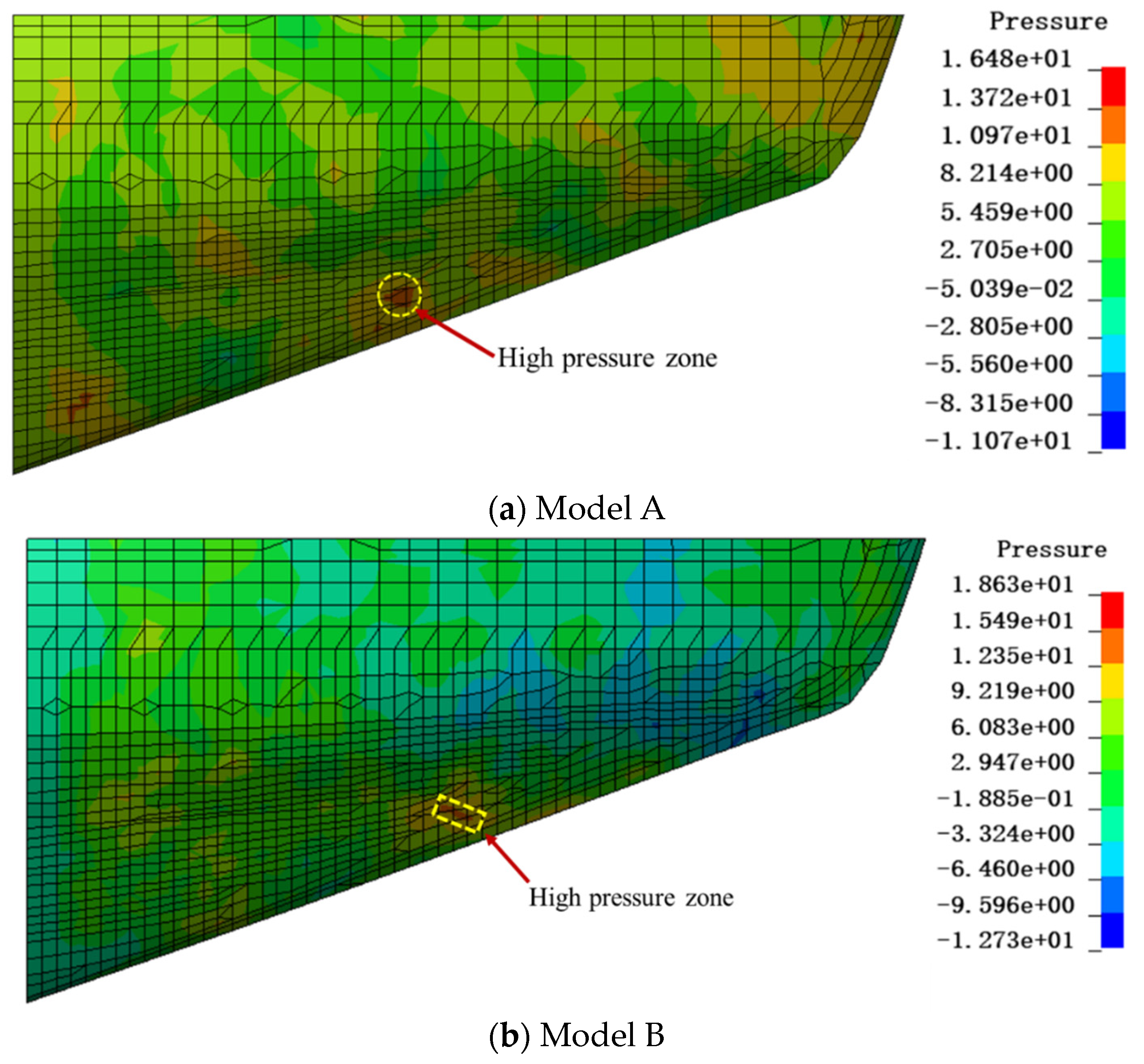
5.1. The Comparison of Different Ice Ridge Material Models
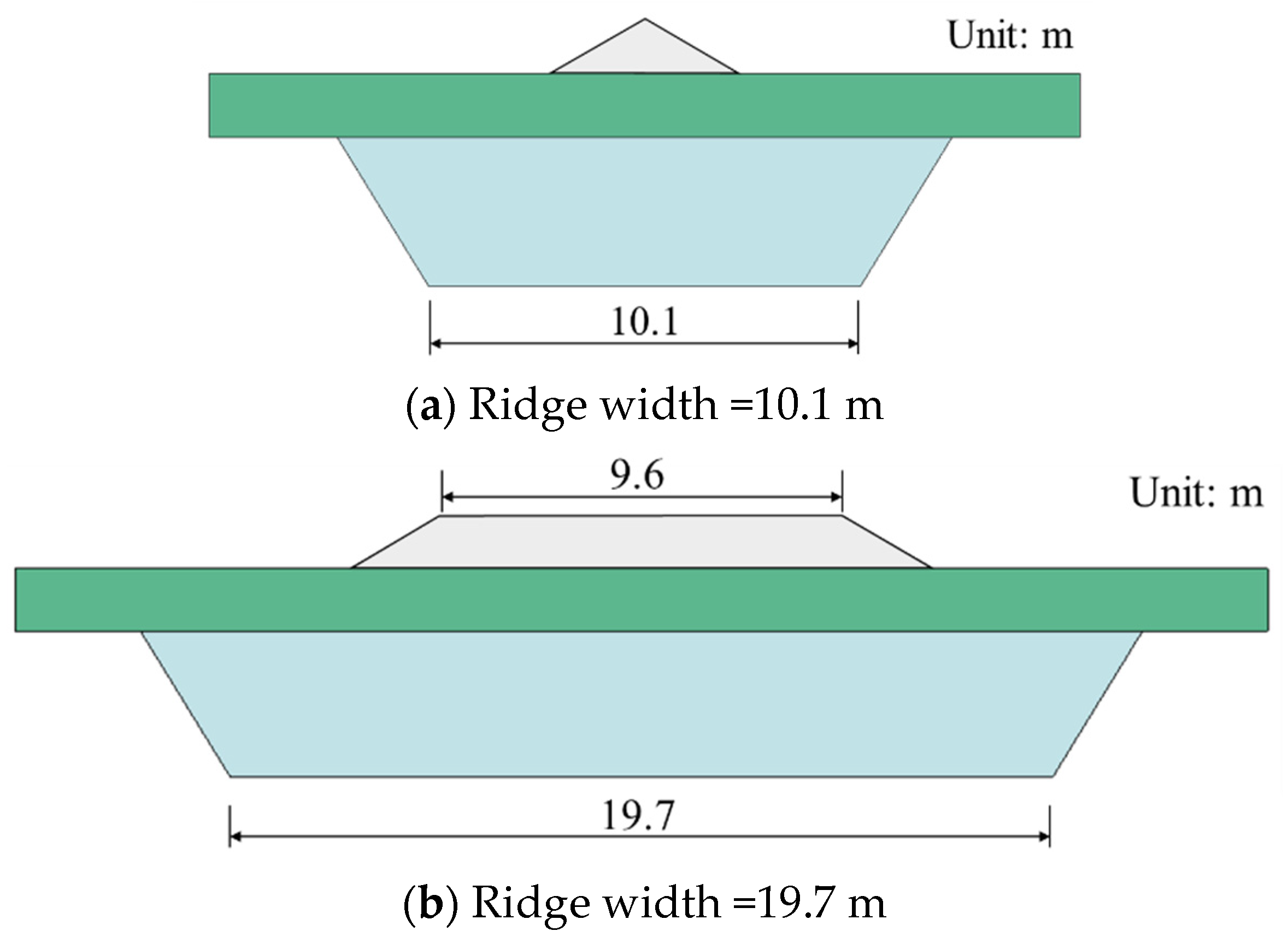
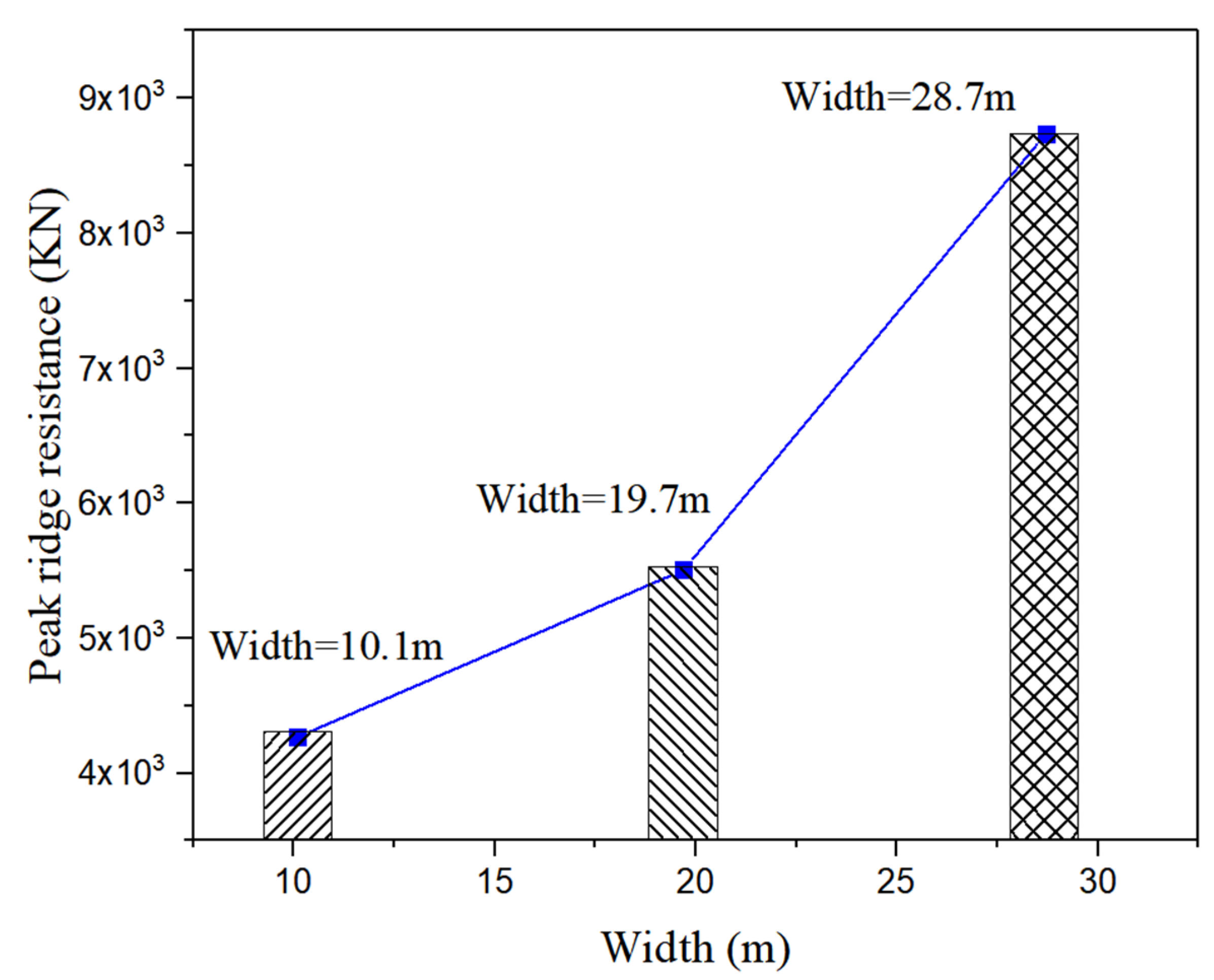
5.2. The Effect of Ridge Width on Structural Response
5.3. The Effect of Ship Speed on Structural Response
6. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. The Material Model of Ice Ridge
Appendix A.1. The Continuous Surface Cap Model

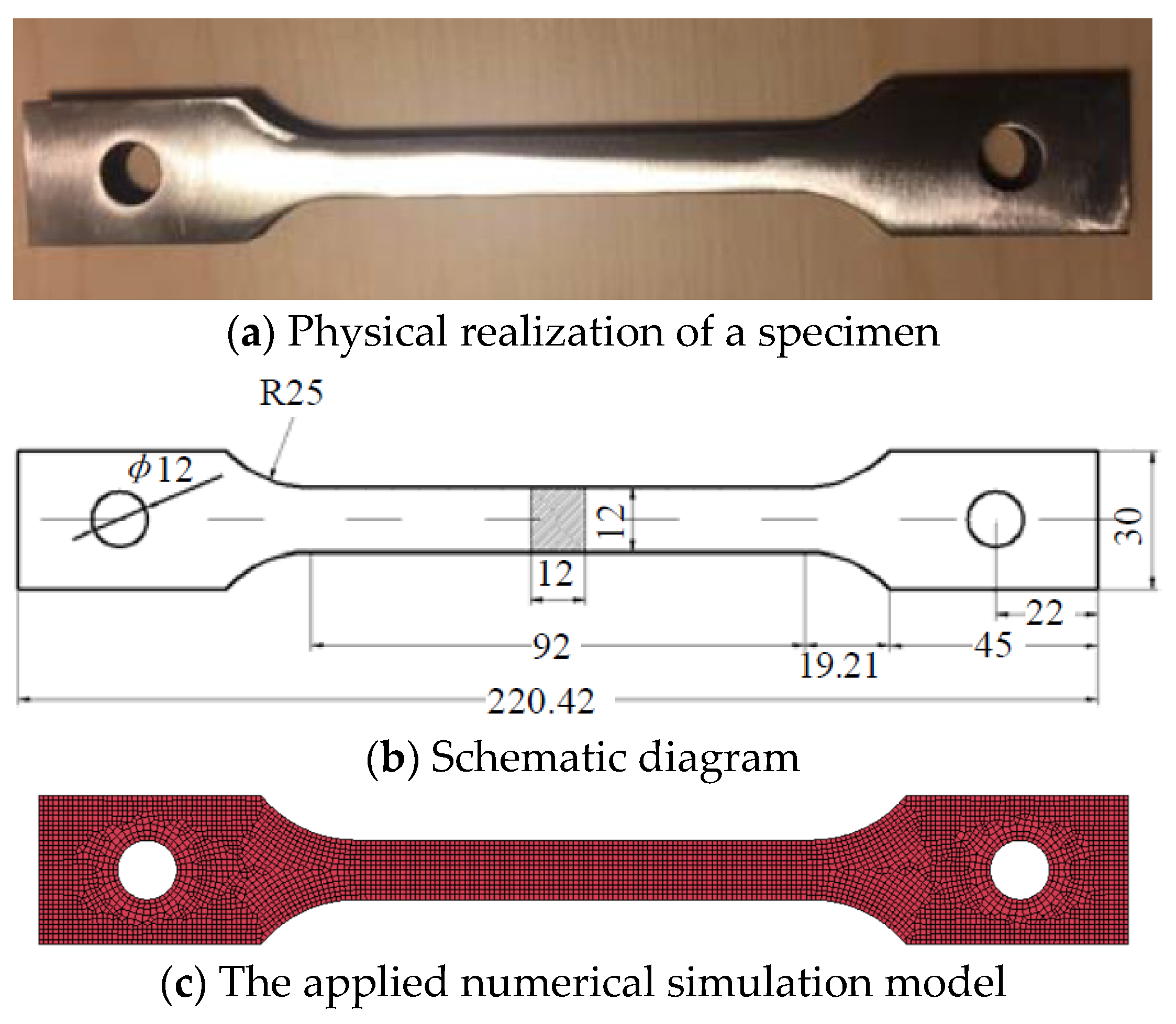
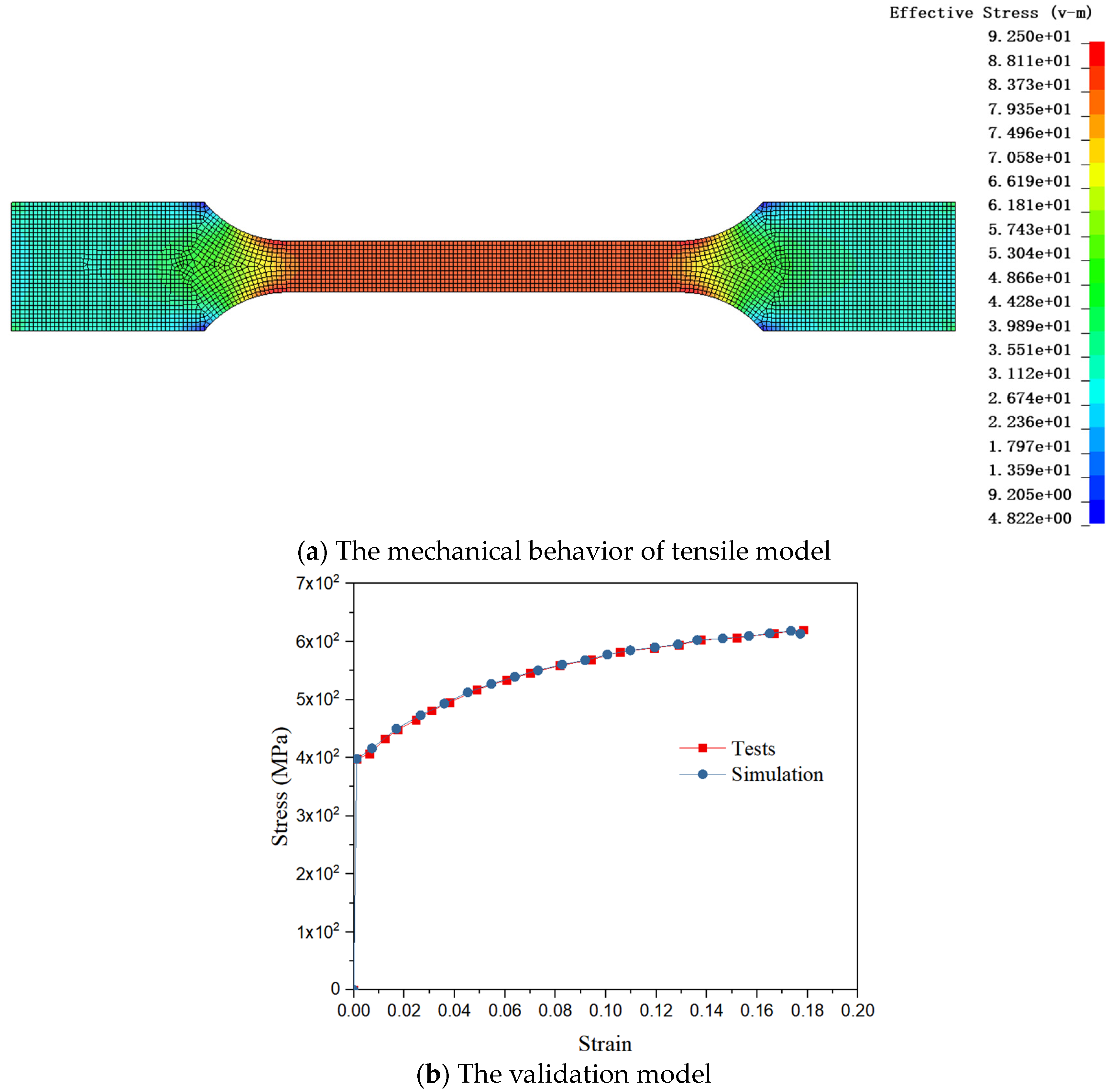
Appendix A.2. The Material Parameters and Validation of Ice Ridge

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Consolidated layer (2004 lab tests, Barents Sea) | porosity (%) | salinity (ppt) | density (kg/L) | ice strength (MPa) |
| 5~10 | 4.4 | 0.88 | 3.94 (±1.62) |
Appendix A.2.1. Uniaxial Compression Tests for Consolidated Layer of Ice Ridge

| Parameter | Symbol | Value |
|---|---|---|
| Density (Kg/m3) | 887 | |
| Shear modulus (MPa) | G | 1538 |
| Bulk modulus (MPa) | K | 3333 |
| Compression surface terms | α | 1.0 |
| θ | 0.396 | |
| Cap ellipticity ratio | R | 8.957 |
| Initial intercept of the cap surface | XD | 10.0 |
| Maximum plastic volumetric strain | W | 0.093 |
| Linear shape parameters | D1 | 86.0 |
| Quadratic shape parameters | D2 | 0.03 |
| Ductile shape softening parameter | B | 1.0 |
| Fracture energy in uniaxial compression | Gfc | 0.327 |
| Brittle shape softening parameter | D | 1.0 |
| Fracture energy in uniaxial tension | Gfs | 0.0372 |
| Fracture energy in pure shear | Gft | 0.0372 |
| Rate effects parameter for uniaxial compressive stress | 10.976 | |
| Rate effect power for uniaxial compressive stress | 0.093783 |

| Density (kg/m3) | Elastic Modulus (MPa) | Poisson’s Ratio | Maximum Effective Strain at Failure |
|---|---|---|---|
| 887 | 2160 | 0.3 | 5 × 10−5~5 × 10−3 |

Appendix A.2.2. Punch-through Shear Tests for the Keel of Ice Ridge

| Parameter | Symbol | Value |
|---|---|---|
| Density (Kg/m3) | 541 | |
| Shear modulus (MPa) | G | 17.31 |
| Bulk modulus (MPa) | K | 37.5 |
| Compression surface terms | α | 0.016 |
| θ | 0.182 | |
| Cap ellipticity ratio | R | 9.44 |
| Initial intercept of the cap surface | XD | 0.595 |
| Maximum plastic volumetric strain | W | 0.05 |
| Linear shape parameters | D1 | 0.001 |
| Quadratic shape parameters | D2 | 0.65 |
| Ductile shape softening parameter | B | 20 |
| Fracture energy in uniaxial compression | Gfc | 0.4 |
| Brittle shape softening parameter | D | 1 |
| Fracture energy in uniaxial tension | Gfs | 0.065 |
| Fracture energy in pure shear | Gft | 0.065 |
| Rate effects parameter for uniaxial compressive stress | 10.976 | |
| Rate effect power for uniaxial compressive stress | 0.093783 |

Appendix B. The Lindqvist Formulation for Ice Resistance
References
- Xie, C.; Zhou, L.; Ding, S.; Lu, M.; Zhou, X. Research on self-propulsion simulation of a polar ship in a brash ice channel based on body force model. Int. J. Nav. Archit. Ocean Eng. 2023, 15, 100557. [Google Scholar] [CrossRef]
- Dong, W.; Zhou, L.; Ding, S.; Wang, A.; Cai, J. Two-Staged Method for Ice Channel Identification Based on Image Seg-mentation and Corner Point Regression. China Ocean. Eng. 2024, 38, 1–13. [Google Scholar]
- Zhou, L.; Sun, Q.; Ding, S.; Han, S.; Wang, A. A Machine-Learning-Based Method for Ship Propulsion Power Prediction in Ice. J. Mar. Sci. Eng. 2023, 11, 1381. [Google Scholar] [CrossRef]
- Tikanmäki, M.; Heinonen, J. Estimating extreme level ice and ridge thickness for offshore wind turbine design: Case study Kriegers Flak. Wind. Energy 2022, 25, 639–659. [Google Scholar] [CrossRef]
- EN ISO 19906:2019; Petroleum and Natural Gas Industries—Arctic Offshore Structures. ISO: Geneva, Switzerland, 2019.
- Grevsgård, S.M. Finite Element Simulations of Unconsolidated Keel Actions from First-Year Ice Ridges. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2015. [Google Scholar]
- Gong, H.; Polojärvi, A.; Tuhkuri, J. Discrete element simulation of the resistance of a ship in unconsolidated ridges. Cold Reg. Sci. Technol. 2019, 167, 102855. [Google Scholar] [CrossRef]
- Timco, G.W.; Johnston, M. Ice loads on the caisson structures in the Canadian Beaufort Sea. Cold Reg. Sci. Technol. 2004, 38, 185–209. [Google Scholar] [CrossRef]
- Song, M.; Yuan, W.; Liu, K.; Han, Y. Analysis of Ship Motion in An Ice Ridge Field Based on Empirical Approach. China Ocean Eng. 2023, 37, 912–922. [Google Scholar] [CrossRef]
- Su, B.; Riska, K.; Moan, T. A numerical method for the prediction of ship performance in level ice. Cold Reg. Sci. Technol. 2010, 60, 177–188. [Google Scholar] [CrossRef]
- Kujala, P.; Tuhkuri, J.; Varsta, P. Ship-Ice Contact and Design Loads. In Proceedings of the International Conference on Ships and Marine Structures in Cold Regions, Calgary, AB, Canada, 16–18 March 1994. [Google Scholar]
- Hisette, Q.; Alekseev, A.; Seidel, J. Discrete Element Simulation of Ship Breaking Through Ice Ridges. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017; ISOPE-I-17-207, Vol. All Days. Available online: https://onepetro.org/ISOPEIOPEC/proceedings-abstract/ISOPE17/All-ISOPE17/ISOPE-I-17-207/17416 (accessed on 25 June 2017).
- Lubbad, R.; Løset, S. A numerical model for real-time simulation of ship–ice interaction. Cold Reg. Sci. Technol. 2011, 65, 111–127. [Google Scholar] [CrossRef]
- Su, B.; Riska, K.; Moan, T. Numerical study of ice-induced loads on ship hulls. Mar. Struct. 2011, 24, 132–152. [Google Scholar] [CrossRef]
- Kim, J.-H.; Kim, Y.; Kim, H.-S.; Jeong, S.-Y. Numerical simulation of ice impacts on ship hulls in broken ice fields. Ocean Eng. 2019, 182, 211–221. [Google Scholar] [CrossRef]
- Jeon, S.; Kim, Y. Numerical simulation of level ice–structure interaction using damage-based erosion model. Ocean Eng. 2021, 220, 108485. [Google Scholar] [CrossRef]
- Xue, Y.; Liu, R.; Li, Z.; Han, D. A review for numerical simulation methods of ship–ice interaction. Ocean Eng. 2020, 215, 107853. [Google Scholar] [CrossRef]
- Aleksandrov, A.; Matantsev, R. Impulse Model for Estimation of Local and Global ice Loads on Fixed Offshore Ice-Resistant Structures. In Proceedings of the Twenty-fifth International Ocean and Polar Engineering Conference, Big Island, HI, USA, 21–26 June 2015; ISOPE-I-15-440, Vol. All Days. Available online: https://onepetro.org/ISOPEIOPEC/proceedings-abstract/ISOPE15/All-ISOPE15/ISOPE-I-15-440/14833 (accessed on 21 June 2015).
- Qu, Y.; Yue, Q.; Bi, X.; Kärnä, T. A random ice force model for narrow conical structures. Cold Reg. Sci. Technol. 2006, 45, 148–157. [Google Scholar] [CrossRef]
- Høyland, K.V. Morphology and small-scale strength of ridges in the North-western Barents Sea. Cold Reg. Sci. Technol. 2007, 48, 169–187. [Google Scholar] [CrossRef]
- Robin, G.d.Q. Seismic shooting and related investigations. In Norwegian-British-Swedish Antarctic Expedition, Norsk Polarinstitutt: Tromsø, Norway, 1959.
- Goodman, D.J.; Wadhams, P.; Squire, V.A. The Flexural Response of a Tabular Ice Island to Ocean Swell. Ann. Glaciol. 1980, 1, 23–27. [Google Scholar] [CrossRef]
- Schulson, E.M. The structure and mechanical behavior of ice. JOM 1999, 51, 21–27. [Google Scholar] [CrossRef]
- Hallquist, J.O. LS-DYNA Keyword User’s Manual; Livermore Software Technology Corportation (LSTC): Livermore, CA, USA, 2018. [Google Scholar]
- Frederking, R.J.; Barker, A. Friction of Sea Ice on Steel For Condition of Varying Speeds. In Proceedings of the Twelfth International Offshore and Polar Engineering Conference, Kitakyushu, Japan, 26–31 May 2002; ISOPE-I-02-118, Vol. All Days. Available online: https://onepetro.org/ISOPEIOPEC/proceedings-abstract/ISOPE02/All-ISOPE02/ISOPE-I-02-118/8752 (accessed on 26 May 2002).
- Zhao, W.; Leira, B.J.; Kim, E.; Feng, G.; Sinsabvarodom, C. A Probabilistic Framework for the Fatigue Damage Assessment of Ships Navigating through Level Ice Fields. Appl. Ocean Res. 2021, 111, 102624. [Google Scholar] [CrossRef]
- Wu, G.; Tang, W.; Wang, Q.; Zhao, Y.; Ma, Q.; Li, Z. Full-scale ice trials of R/V Xuelong 2 during her maiden Antarctic voyage. J. Ship Mech. 2021, 25, 981–990. [Google Scholar]
- Lindqvist, G. A Straightforward Method for Calculation of Ice Resistance of Ships. In Proceedings of the POAC 89, 10th International Conference, Port and Ocean Engineering under Arctic Conditions, Luleaa, Sweden, 12–16 June 1989; pp. 722–735. [Google Scholar] [CrossRef]
- Castellani, G.; Schaafsma, F.L.; Arndt, S.; Lange, B.A.; Peeken, I.; Ehrlich, J.; David, C.; Ricker, R.; Krumpen, T.; Hendricks, S.; et al. Large-Scale Variability of Physical and Biological Sea-Ice Properties in Polar Oceans. Front. Mar. Sci. 2020, 7, 536. [Google Scholar] [CrossRef]
- Niiler, H. Equivalent Ice Thickness for Evaluating Ship Resistance in Ice; Aalto University: Espoo, Finland, 2014. [Google Scholar]
- ISO 15579:2000; Metal Material-Tensile Testing at Low Temperature. ISO: Geneva, Switzerland, 2000.
- Zhao, W.; Cao, J.; Feng, G.; Ren, H. Investigation on Temperature Dependence of Yielding Strength for Marine DH36 Steel. Shipbuild. China 2018, 59, 108–115. [Google Scholar]
- CCS. Rules and Regulations for the Construction and Classification of Sea-Going Steel Ships; China Communications Press: Beijing, China, 2018. [Google Scholar]
- Lemaitre, J. A Course on Damage Mechanics; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar] [CrossRef]
- Dufailly, J.; Lemaitre, J. Modeling Very Low Cycle Fatigue. Int. J. Damage Mech. 1995, 4, 153–170. [Google Scholar] [CrossRef]
- Schwer, L.E.; Murray, Y.D. A three-invariant smooth cap model with mixed hardening. Int. J. Numer. Anal. Methods Géoméch. 1994, 18, 657–688. [Google Scholar] [CrossRef]
- Pernas-Sánchez, J.; Pedroche, D.A.; Varas, D.; López-Puente, J.; Zaera, R. Numerical modeling of ice behavior under high velocity impacts. Int. J. Solids Struct. 2012, 49, 1919–1927. [Google Scholar] [CrossRef]
- Shafrova, S.; Høyland, K.V. The freeze-bond strength in first-year ice ridges. Small-scale field and laboratory experiments. Cold Reg. Sci. Technol. 2008, 54, 54–71. [Google Scholar] [CrossRef]
- Bonath, V.; Edeskär, T.; Lintzén, N.; Fransson, L.; Cwirzen, A. Properties of ice from first-year ridges in the Barents Sea and Fram Strait. Cold Reg. Sci. Technol. 2019, 168, 102890. [Google Scholar] [CrossRef]
- Patil, A.; Sand, B.; Fransson, L. Finite Element Simulation of Punch Through Test Using a Continuous Surface Cap Model. 2015. Available online: http://hdl.handle.net/11250/2640254 (accessed on 14 June 2015).
- Sinha, N.K. Short-Term Rheology of Polycrystalline Ice. J. Glaciol. 1978, 21, 457–474. [Google Scholar] [CrossRef]

































| Hs (m) | Ws (m) | αs (°) | Hk (m) | hk (m) | αk (°) | bk (m) | Hc (m) |
|---|---|---|---|---|---|---|---|
| 1.35 | 9.586 | 30 | 5.0 | 3.5 | 58 | 19.7 | 1.5 |
| Model | Numerical Model | Cost CPU Time (Hours) * |
|---|---|---|
| A | The whole ice ridge was modeled as a CSCM material (homogenous) | 17 |
| B | The whole ice ridge was modeled as an elastic–brittle material | 17 |
| C | The materials of the consolidated layer and the keel (sail) were represented by the elastic–brittle model and the CSCM material, respectively | 25 |
| D | The materials of the consolidated layer and the keel (sail) were represented by different CSCM models | 25 |
| Main Dimension | Symbol | Value |
|---|---|---|
| Overall length | LOA | 161.0 m |
| Waterline length | 149.0 m | |
| Molded breadth | B | 29.0 m |
| Molded depth | D | 15.0 m |
| Designed molded draft | d | 8.5 m |
| Parameter | Symbol | Value |
|---|---|---|
| Length of ship (m) | L | 149.0 |
| Breadth of ship (m) | B | 29.0 |
| Draught of ship (m) | T | 8.5 |
| Stem angle (°) | 20 | |
| Waterline entrance angle (°) | 40 | |
| Angle between the surface and a vertical vector | * | 30 |
| Bending strength of ice (kPa) | 718.6 | |
| Equivalent ice thickness (m) | 1.5, 2.5 | |
| Elastic modulus of ice (GPa) | 2.0 | |
| Poisson ratio of ice | 0.3 |
| c | hi (m) | ρ | μ (m−1) | hk (m) | ksn | hsn (m) | αk (°) |
|---|---|---|---|---|---|---|---|
| 1.0 | 1.5 | 30% | 0.05 | 5 | 0.33 | 0 | 58 |
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Density | 7850 | kg/m3 | |
| Poisson ratio | 0.3 | - | |
| Yield strength | 384.5 | MPa | |
| Elastic modulus | 210 | GPa | |
| Shear modulus | 846 | GPa | |
| Strain hardening rate | 0.4 | - | |
| Strain rate parameter | C | 40.4 | - |
| Strain rate parameter | P | 5 | - |
| Model | Size of HPZ (m2) | Peak Pressure of HPZ (MPa) | Load Period (s) |
|---|---|---|---|
| A | 0.94 × 0.95 | 16.48 | 0.2 |
| B | 0.85 × 0.7 | 17.0 | 0.3 |
| C | 1.2 × 0.98 | 3.12 | 0.2 |
| D | 0.92 × 0.86 | 1.27 | 0.6 |
| Width (m) | Size of HPZ (m2) | Peak Pressure of HPZ (MPa) | Load Period (s) |
|---|---|---|---|
| 10.1 | 0.44 × 0.78 | 0.917 | 0.3 |
| 19.7 | 0.915 × 0.855 | 1.27 | 0.6 |
| 28.7 | 0.88 × 1.3 | 1.24 | 0.4 |
| Speed (kn) | Size of HPZ (m2) | Peak Pressure of HPZ (MPa) | Load Period (s) |
|---|---|---|---|
| 3 | 0.915 × 0.855 | 1.27 | 0.6 |
| 8 | 1.6 × 1.8 | 12.24 | 0.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, W.; Leira, B.J.; Høyland, K.V.; Kim, E.; Feng, G.; Ren, H. A Framework for Structural Analysis of Icebreakers during Ramming of First-Year Ice Ridges. J. Mar. Sci. Eng. 2024, 12, 611. https://doi.org/10.3390/jmse12040611
Zhao W, Leira BJ, Høyland KV, Kim E, Feng G, Ren H. A Framework for Structural Analysis of Icebreakers during Ramming of First-Year Ice Ridges. Journal of Marine Science and Engineering. 2024; 12(4):611. https://doi.org/10.3390/jmse12040611
Chicago/Turabian StyleZhao, Weidong, Bernt Johan Leira, Knut Vilhelm Høyland, Ekaterina Kim, Guoqing Feng, and Huilong Ren. 2024. "A Framework for Structural Analysis of Icebreakers during Ramming of First-Year Ice Ridges" Journal of Marine Science and Engineering 12, no. 4: 611. https://doi.org/10.3390/jmse12040611