
Experimental Results and Analysis of Midrange Underwater Asymmetric Wireless Power Transfer


Abstract
:1. Introduction
2. Experimental Findings of Midrange WPT in Seawater at a Fixed Load Resistance
2.1. Experiment in Seawater
2.2. Analysis of Experimental Results in Seawater
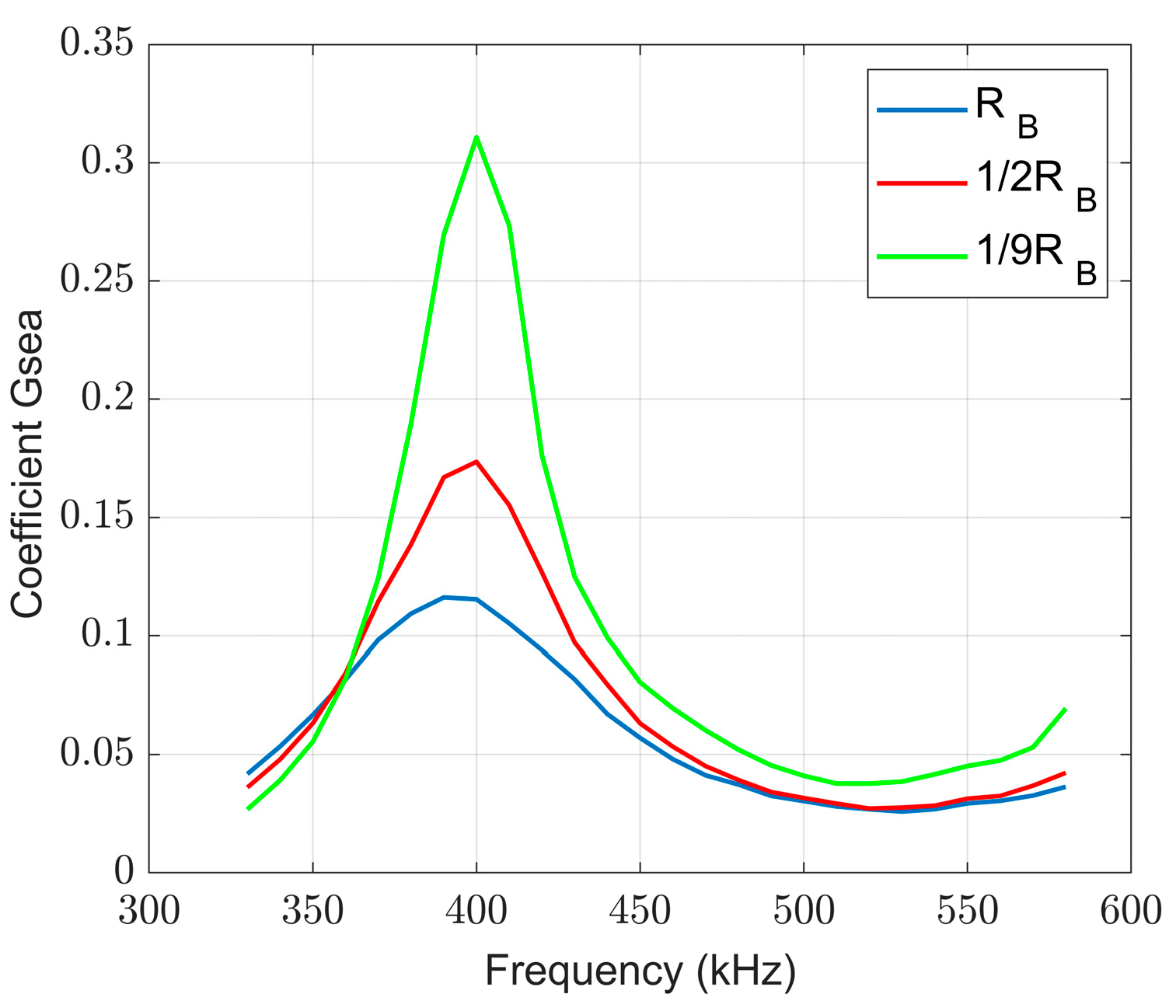
2.3. Impact of Variable Frequency and Variable Resistance RB on Efficiency
3. Underwater WPT System Circuit Model at a Fixed Load Resistance
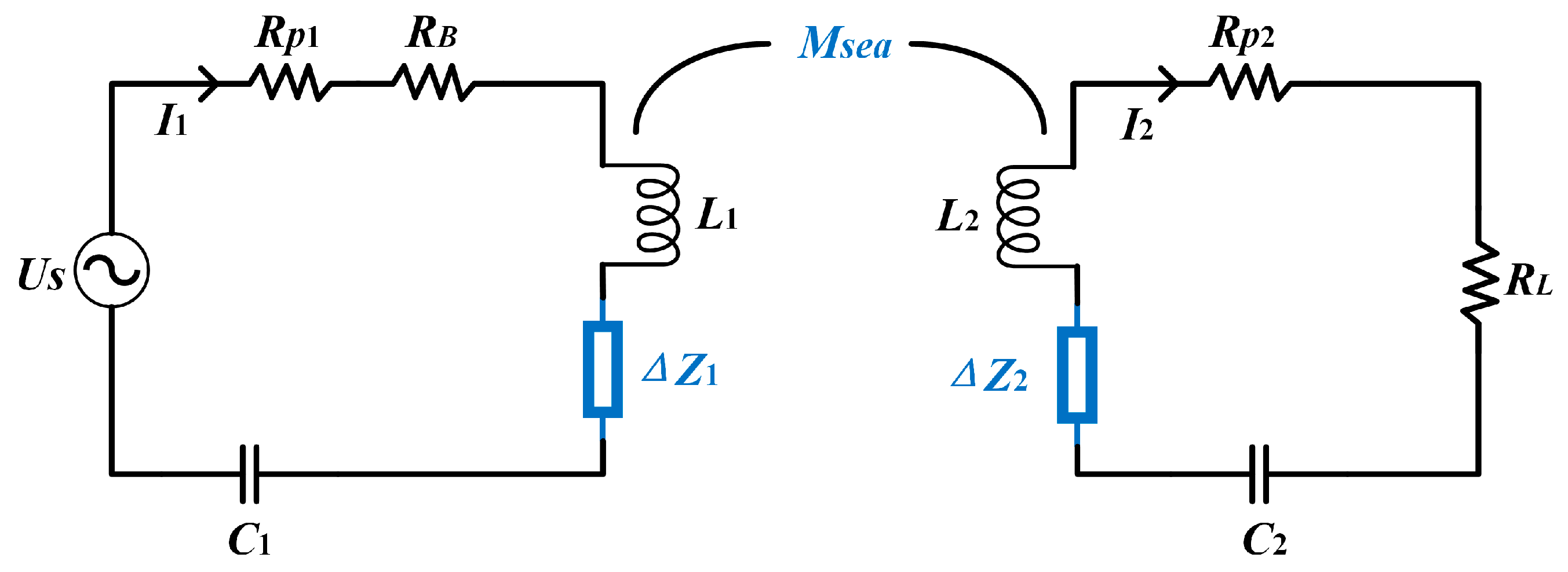
3.1. Circuit Modeling and Operating Principle
3.2. Parametric Analysis of Symmetric Two-Coil Structures
3.3. Comparative Analysis of Asymmetric and Symmetric WPT Systems
4. Theoretical Explanation of Midrange Underwater WPT at a Fixed Load Resistance
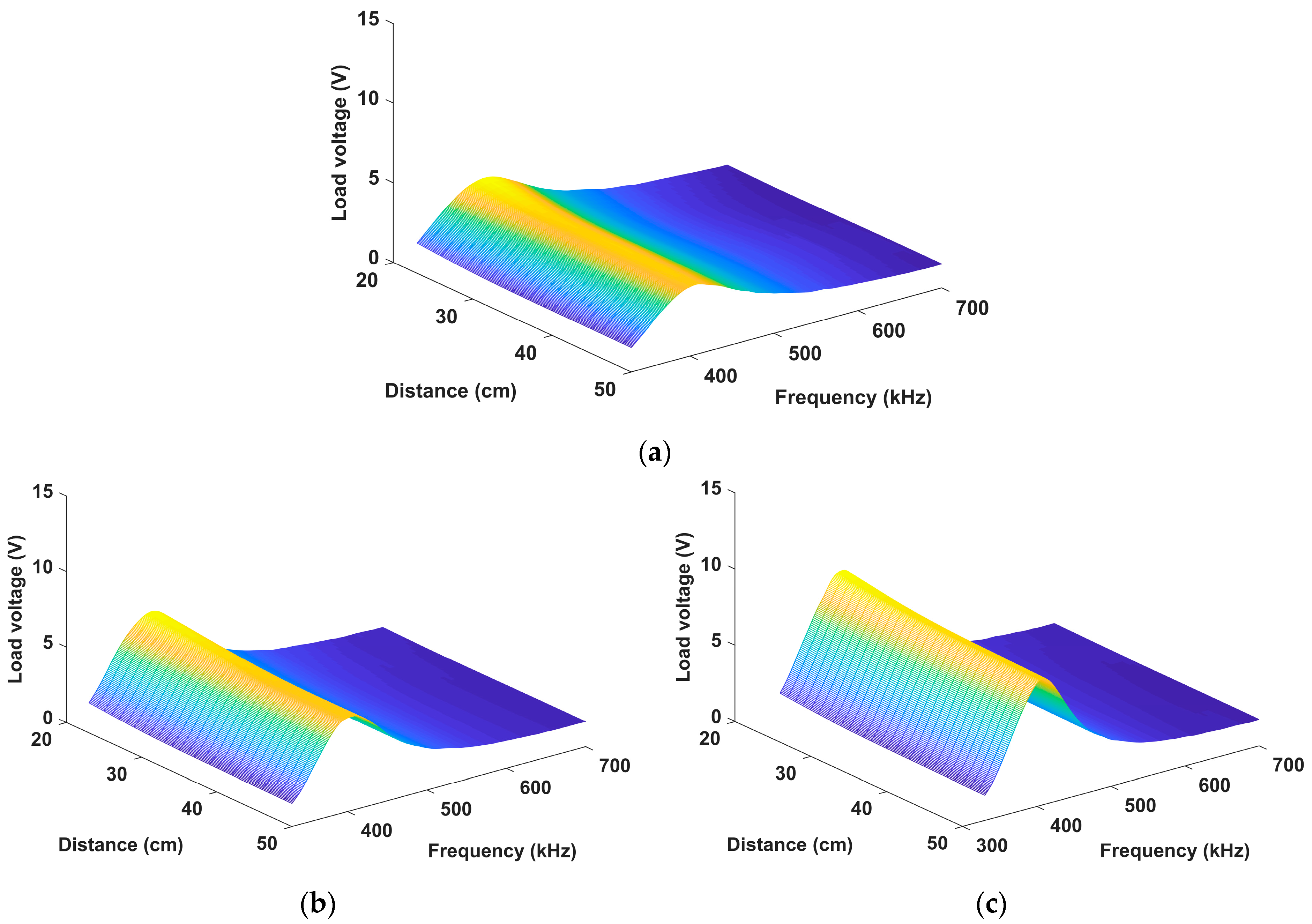
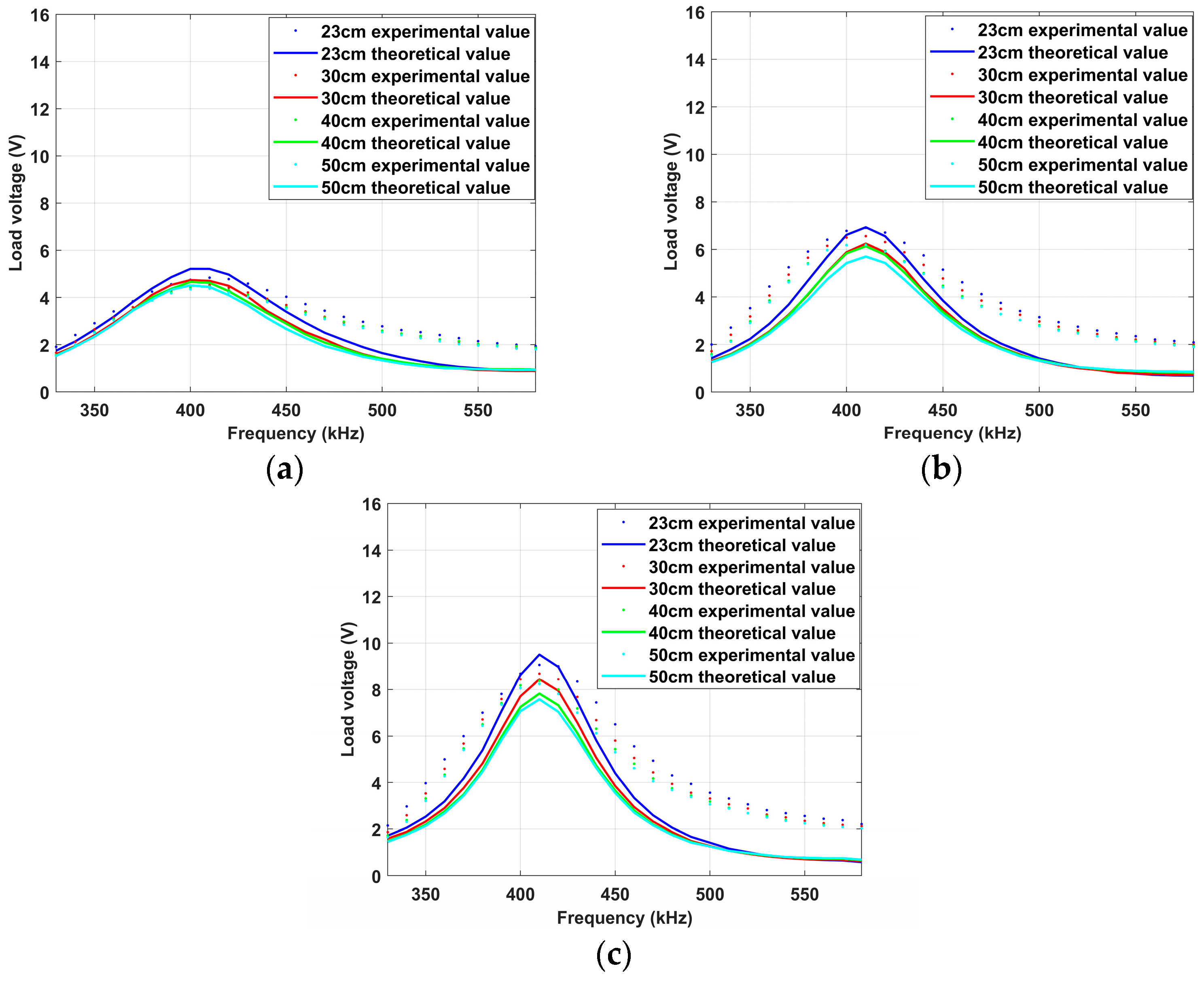
4.1. Model-Predicted Secondary-Side Load Voltage
4.2. Reasons for the Transfer Being Better in Seawater Than in Air
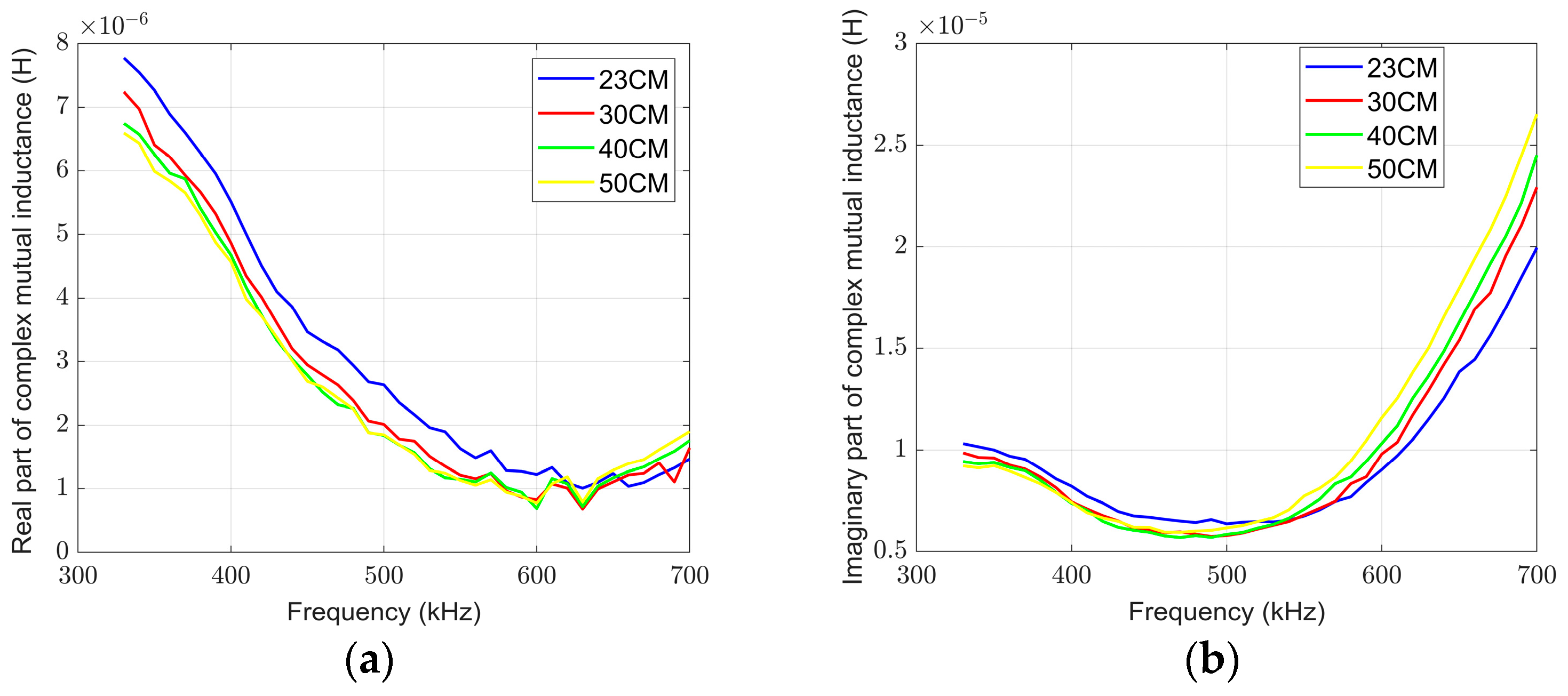
4.3. Reasons for the Left Shift of Resonant Frequencies in Seawater
4.4. Reasons for the Transfer Being Better in Asymmetric Circuits Than in Symmetric Ones
5. Transfer Characteristics Analysis of Midrange Underwater WPT with a Variable Load Resistance
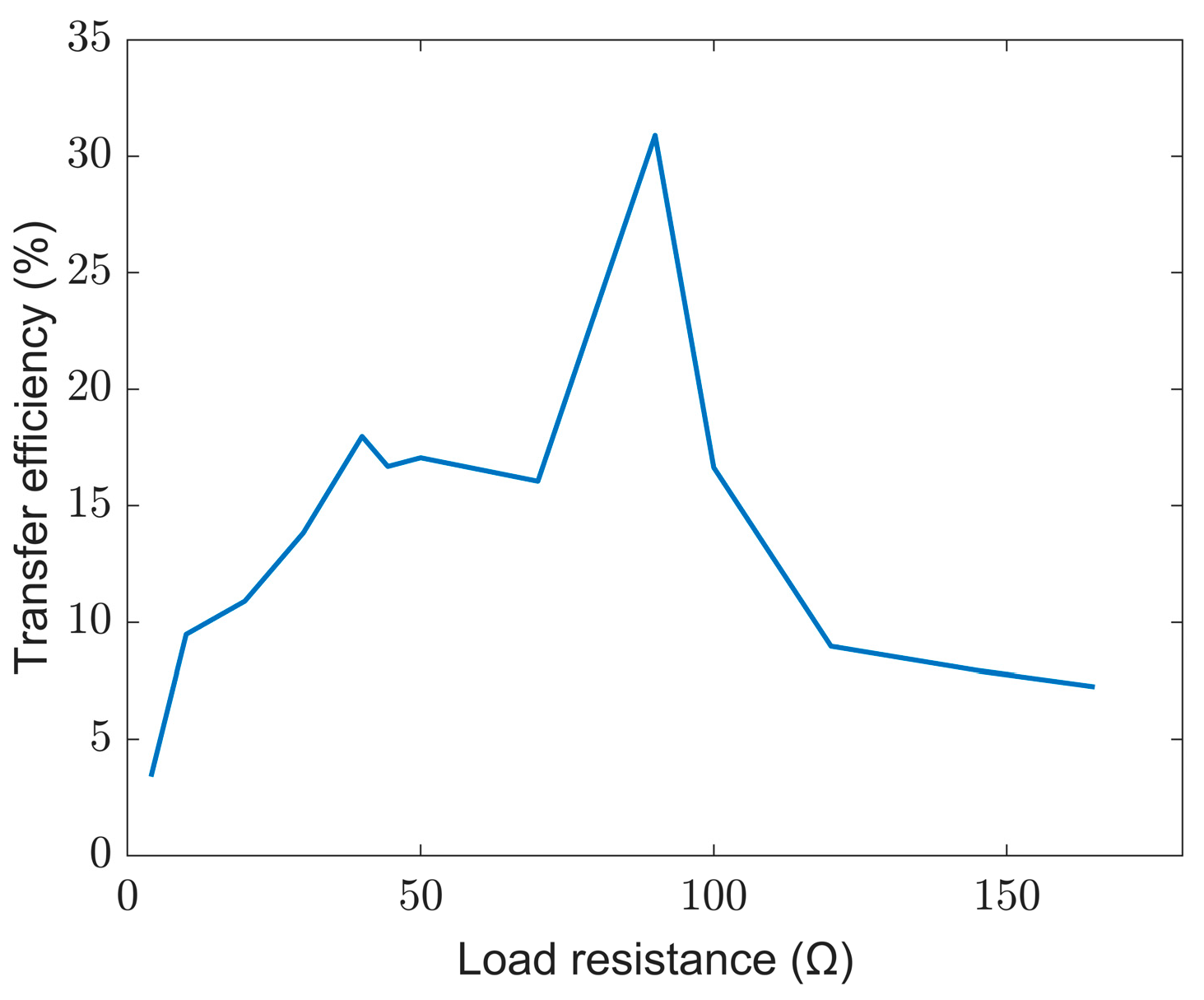
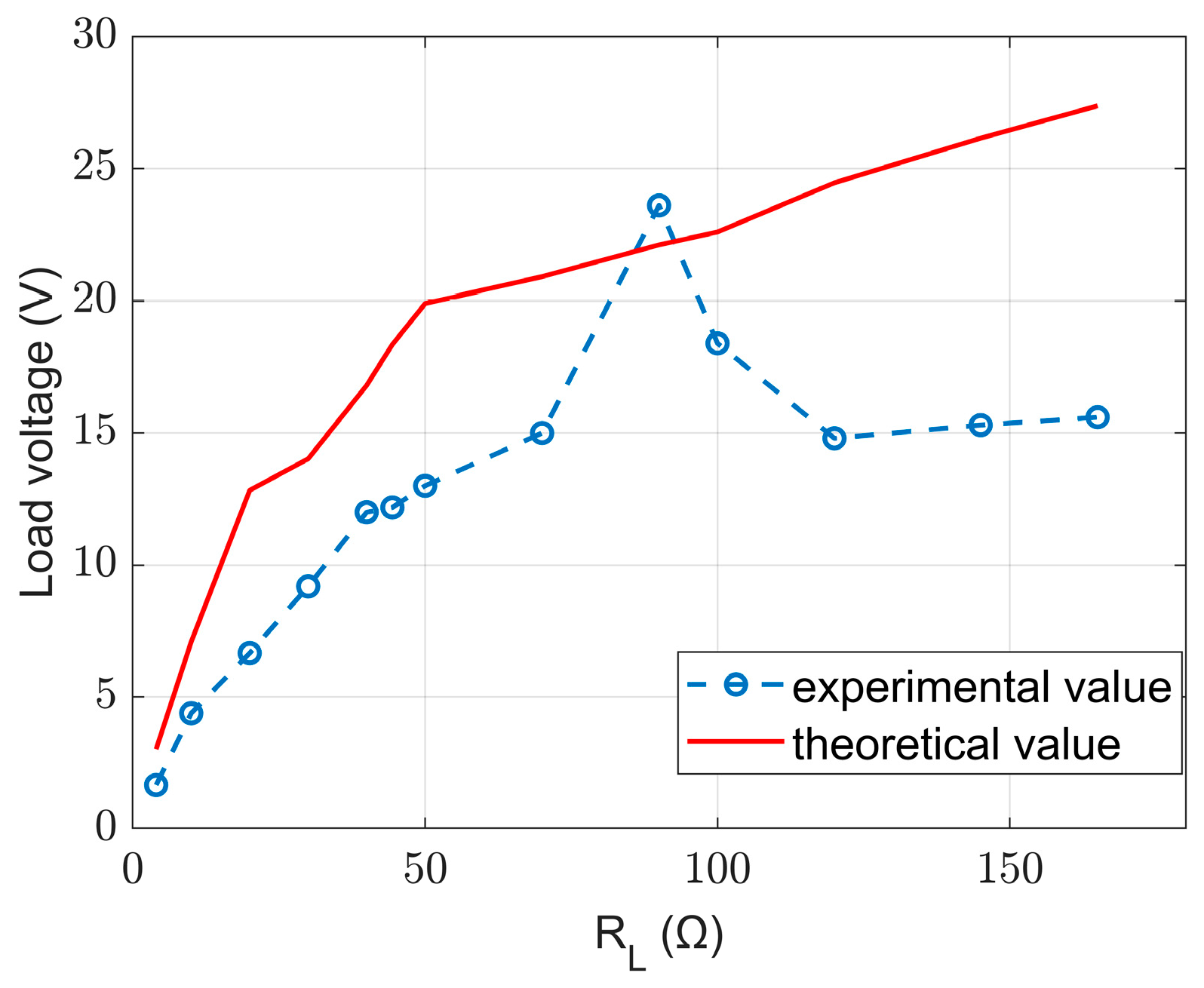
5.1. Experimental Findings with a Variable Load Resistance
5.2. Theoretical Calculations with a Variable Load Resistance
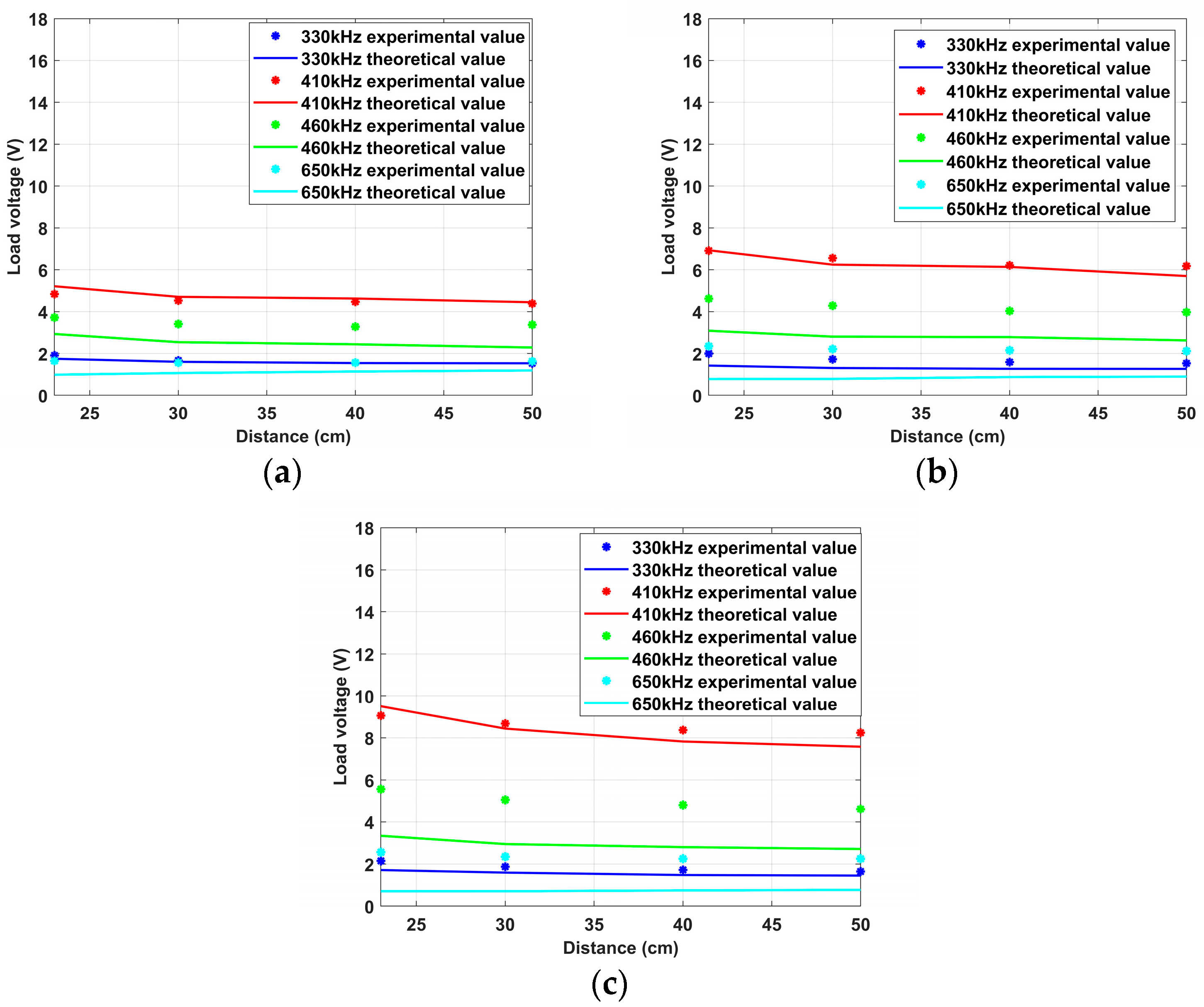
5.3. Comparison of Experimental and Theoretical Values of the Model
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Elwakil, A.; Maundy, B.; Allagui, A. A Note on the Analysis of Two-Coil Wireless Power Transfer Systems. Circuits Syst. Signal Process. 2023, 42, 1808–1817. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, K.H.; Hu, A.P. Investigation of reactive power distribution between two coils of inductive power transfer system by Poynting vector analysis. Int. J. Electr. Power Energy Syst. 2022, 136, 107621. [Google Scholar] [CrossRef]
- Sumi, F.H.; Dutta, L.; Sarker, F. Future with wireless power transfer technology. J. Electr. Electron. Syst. 2018, 7, 1–7. [Google Scholar] [CrossRef]
- Wang, X.; Pang, J.Q.; Zhao, N.; Liu, L.F.; Dong, H.L.; Tan, Q.L.; Xiong, J.J. Lateral and angular misalignments of coil in wireless power transfer system. Sens. Actuator A Phys. 2022, 341, 113577. [Google Scholar] [CrossRef]
- Zhang, Z.; Pang, H.L.; Georgiadis, A.; Cecati, C. Wireless Power Transfer—An Overview. IEEE Trans. Ind. Electron. 2019, 66, 1044–1058. [Google Scholar] [CrossRef]
- Cai, T.; Lyu, F.; Wang, T.; Huang, F. Design of a Highly Compatible Underwater Wireless Power Transfer Station for Seafloor Observation Equipment. J. Mar. Sci. Eng. 2023, 11, 1205. [Google Scholar] [CrossRef]
- Luo, T.; Zhang, S. Design of Underwater Wireless Power Transmission System Based on Inductive Coupling. J. Mar. Sci. Eng. 2023, 11, 1699. [Google Scholar] [CrossRef]
- Bi, Z.C.; Keoleian, G.A.; Lin, Z.H.; Moore, M.R.; Chen, K.N.; Song, L.J.; Zhao, Z.M. Life cycle assessment and tempo-spatial optimization of deploying dynamic wireless charging technology for electric cars. Transp. Res. Part. C Emerg. Technol. 2019, 100, 53–67. [Google Scholar] [CrossRef]
- Sun, K.; Niu, W. SPWM Inverter Control for Wireless Constant Current and Voltage Charging. World Electr. Veh. J. 2023, 14, 111. [Google Scholar] [CrossRef]
- Wen, H.; Li, J.; Zhang, K.; Ye, J.; Yan, Z.; Song, B.; Tong, X. Enhancing Power Transmission Stability of AUV’s Wireless Power Transfer System with Compact Planar Magnetic Coupler. J. Mar. Sci. Eng. 2023, 11, 566. [Google Scholar] [CrossRef]
- Xia, T.; Zhang, X.; Zhu, Z.; Yu, H.; Li, H. An Adaptive Control Strategy for Underwater Wireless Charging System Output Power with an Arc-Shaped Magnetic Core Structure. J. Mar. Sci. Eng. 2023, 11, 294. [Google Scholar] [CrossRef]
- Teeneti, C.R.; Truscott, T.T.; Beal, D.N.; Pantic, Z. Review of wireless charging systems for autonomous underwater vehicles. IEEE J. Oceanic Eng. 2019, 46, 68–87. [Google Scholar] [CrossRef]
- Kuipers, J.; Bruning, H.; Bakker, S.; Rijnaarts, H. Near field resonant inductive coupling to power electronic devices dispersed in water. Sens. Actuator A Phys. 2012, 178, 217–222. [Google Scholar] [CrossRef]
- Zhang, K.H.; Zhu, Z.B.; Du, L.N.; Song, B.W. Eddy loss analysis and parameter optimization of the WPT system in seawater. J. Power Electron. 2018, 18, 778–788. [Google Scholar] [CrossRef]
- Bana, V.; Kerber, M.; Anderson, G.; Rockway, J.D.; Phipps, A. Underwater wireless power transfer for maritime applications. In Proceedings of the 2015 IEEE Wireless Power Transfer Conference (WPTC), Boulder, CO, USA, 13–15 May 2015. [Google Scholar] [CrossRef]
- Kim, J.; Kim, K.; Kim, H.; Kim, D.; Park, J.; Ahn, S. An efficient modeling for underwater wireless power transfer using Z-parameters. IEEE Trans. Electromagn. Compat. 2019, 61, 2006–2014. [Google Scholar] [CrossRef]
- Sun, P.; Wu, X.S.; Cai, J.; Wang, X.N.; Zhang, X.C.; Liang, Y.; Xiong, Q.; Rong, E.G. Eddy current loss analysis and frequency optimization design of double-sided LCC-IPT system in seawater environment. Sci. China Technol. Sci. 2022, 65, 407–418. [Google Scholar] [CrossRef]
- Chu, S.; Luloff, M.S.; Yan, J.; Petrov, P.; Stevens, C.J.; Shamonina, E. Magnetoinductive waves in attenuating media. Sci. Rep. 2021, 11, 7679. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.H.; Zhang, X.Y.; Zhu, Z.B.; Yan, Z.C.; Song, B.W.; Mi, C.C. A new coil structure to reduce eddy current loss of WPT systems for underwater vehicles. IEEE Trans. Veh. Tech. 2018, 68, 245–253. [Google Scholar] [CrossRef]
- Wang, Y.S.; Song, B.W.; Mao, Z.Y. Application of shielding coils in underwater wireless power transfer systems. J. Mar. Sci. Eng. 2019, 7, 267. [Google Scholar] [CrossRef]
- Kurs, A.; Moffatt, R.; Soljačić, M. Simultaneous mid-range power transfer to multiple devices. Appl. Phys. Lett. 2010, 96, 044102. [Google Scholar] [CrossRef]
- Li, Y.; Song, K.; Li, Z.J.; Jiang, J.H.; Zhu, C.B. Optimal efficiency tracking control scheme based on power stabilization for a wireless power transfer system with multiple receivers. Energies 2018, 11, 1232. [Google Scholar] [CrossRef]
- Huang, R.H.; Zhang, B.; Qiu, D.Y.; Zhang, Y.Q. Frequency splitting phenomena of magnetic resonant coupling wireless power transfer. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Guan, Z.P.; Zhang, B.; Qiu, D.Y. Influence of Asymmetric Coil Parameters on the Output Power Characteristics of Wireless Power Transfer Systems and Their Applications. Energies 2019, 12, 1212. [Google Scholar] [CrossRef]
- Li, J.C.; Feng, J.N.; Dou, X.; Yang, H.Y.; Zhang, X.; Ni, K. Design and Comparative Analysis of Symmetric and Asymmetric Couplers for Underwater Wireless Power Transmission System. In Proceedings of the 2022 International Conference on Wireless Power Transfer (ICWPT2022), Chongqing, China, 16–19 September 2022. [Google Scholar] [CrossRef]
- Low, Z.N.; Chinga, R.A.; Tseng, R.; Lin, J. Design and test of a high-power high-efficiency loosely coupled planar wireless power transfer system. IEEE Trans. Ind. Electron. 2008, 56, 1801–1812. [Google Scholar] [CrossRef]
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljacic, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef]
- Niu, W.Q.; Yu, X.J.; Zhang, W.T. Experimental results and analysis of midrange underwater wireless power transfer. Int. J. Circuit Theory Appl. 2023, 51, 2674–2688. [Google Scholar] [CrossRef]
- Li, W.H.; Zhao, H.; Deng, J.J.; Li, S.Q.; Mi, C.C. Comparison study on SS and double-sided LCC compensation topologies for EV/PHEV wireless chargers. IEEE Trans. Veh. Tech. 2015, 65, 4429–4439. [Google Scholar] [CrossRef]
- Corti, F.; Paolucci, L.; Reatti, A.; Grasso, F.; Pugi, L.; Tesi, N.; Grasso, E.; Nienhaus, M. A comprehensive comparison of resonant topologies for magnetic wireless power transfer. In Proceedings of the 2020 IEEE 20th Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 16–18 June 2020. [Google Scholar] [CrossRef]
- Qu, X.; Han, H.; Wong, S.-C.; Chi, K.T.; Chen, W. Hybrid IPT topologies with constant current or constant voltage output for battery charging applications. IEEE Trans. Power Electron. 2015, 30, 6329–6337. [Google Scholar] [CrossRef]
- Wen, H.; Wang, P.; Li, J.; Yang, J.; Zhang, K.; Yang, L.; Zhao, Y.; Tong, X. Improving the Misalignment Tolerance of Wireless Power Transfer System for AUV with Solenoid-Dual Combined Planar Magnetic Coupler. J. Mar. Sci. Eng. 2023, 11, 1571. [Google Scholar] [CrossRef]
- Holmes, J.J. Ocean Electromagnetics. In Springer Handbook of Ocean Engineering; Dhanak, M.R., Xiros, N.I., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 177–196. [Google Scholar] [CrossRef]
- Zhang, K.H.; Ma, Y.S.; Yan, Z.C.; Di, Z.F.; Song, B.W.; Hu, A.P. Eddy current loss and detuning effect of seawater on wireless power transfer. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 909–917. [Google Scholar] [CrossRef]
- Zhang, K.; Du, L.; Zhu, Z.; Song, B.; Xu, D. A normalization method of delimiting the electromagnetic hazard region of a wireless power transfer system. IEEE Trans. Electromagn. Compat. 2017, 60, 829–839. [Google Scholar] [CrossRef]
- Zhang, K.-H.; Zhu, Z.-B.; Song, B.-W.; Xu, D.-M. A power distribution model of magnetic resonance WPT system in seawater. In Proceedings of the 2016 IEEE 2nd annual southern power electronics conference (SPEC), Auckland, New Zealand, 5–8 December 2016. [Google Scholar] [CrossRef]
- Kiani, M.; Ghovanloo, M. A figure-of-merit for designing high-performance inductive power transmission links. IEEE Trans. Ind. Electron. 2012, 60, 5292–5305. [Google Scholar] [CrossRef]
- Dodd, C.; Deeds, W. Analytical solutions to eddy-current probe-coil problems. J. Appl. Phys. 1968, 39, 2829–2838. [Google Scholar] [CrossRef]
- Computer Programs. Available online: http://www.coe.ufrjbr/~acmq/programs/ (accessed on 12 December 2021).
- Niu, W.Q.; Chu, J.X.; Gu, W.; Shen, A.D. Exact Analysis of Frequency Splitting Phenomena of Contactless Power Transfer Systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 1670–1677. [Google Scholar] [CrossRef]
- Hasaba, R.; Okamoto, K.; Kawata, S.; Eguchi, K.; Koyanagi, Y. Magnetic resonance wireless power transfer over 10 m with multiple coils immersed in seawater. IEEE Trans. Microw. Theory Tech. 2019, 67, 4505–4513. [Google Scholar] [CrossRef]
- Xu, F.; Huang, H. Frequency selection for underwater wireless power transfer based on the analysis of eddy current loss. AEU-Int. J. Electron. Commun. 2023, 163, 154618. [Google Scholar] [CrossRef]
- Bradley, A.M.; Feezor, M.D.; Singh, H.; Sorrell, F.Y. Power systems for autonomous underwater vehicles. IEEE J. Oceanic Eng. 2001, 26, 526–538. [Google Scholar] [CrossRef]
- Niu, W.Q.; Ye, C.; Gu, W. Circuit coupling model containing equivalent eddy current loss impedance for wireless power transfer in seawater. Int. J. Circuits Syst. Signal Process. 2021, 15, 410–416. [Google Scholar] [CrossRef]
- Song, K.; Li, Z.J.; Jiang, J.H.; Zhu, C.B. Constant current/voltage charging operation for series–series and series–parallel compensated wireless power transfer systems employing primary-side controller. IEEE Trans. Power Electron. 2017, 33, 8065–8080. [Google Scholar] [CrossRef]
- Ding, S.; Niu, W.; Gu, W. Lateral misalignment tolerant wireless power transfer with a tumbler mechanism. IEEE Access 2019, 7, 125091–125100. [Google Scholar] [CrossRef]
- Niu, W.; Jiang, J.; Ye, C.; Gu, W. Frequency splitting suppression in wireless power transfer using hemispherical spiral coils. AIP Adv. 2022, 12, 055016. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| L1 | Primary coil inductance/μH | 67.5 |
| C1 | Primary capacitance/nF | 1.8 |
| Rp1 | Internal resistance of the primary capacitor and coil, and output resistance of the power amplifier/Ω | 1.1 |
| RB | Primary balance resistance/Ω | 44.4 |
| f01 | Primary resonant frequency/kHz | 460 |
| L2 | Secondary-coil inductance/μH | 67.5 |
| C2 | Secondary capacitance/nF | 1.8 |
| Rp2 | Internal resistance of the secondary capacitor and coil/Ω | 0.5 |
| RL | Secondary load resistance/Ω | 44.4 |
| f02 | Secondary resonant frequency/kHz | 460 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Niu, W.; Yang, Y.; Amirat, Y. Experimental Results and Analysis of Midrange Underwater Asymmetric Wireless Power Transfer. J. Mar. Sci. Eng. 2024, 12, 567. https://doi.org/10.3390/jmse12040567
Chen Y, Niu W, Yang Y, Amirat Y. Experimental Results and Analysis of Midrange Underwater Asymmetric Wireless Power Transfer. Journal of Marine Science and Engineering. 2024; 12(4):567. https://doi.org/10.3390/jmse12040567
Chicago/Turabian StyleChen, Yichi, Wangqiang Niu, Yanhua Yang, and Yassine Amirat. 2024. "Experimental Results and Analysis of Midrange Underwater Asymmetric Wireless Power Transfer" Journal of Marine Science and Engineering 12, no. 4: 567. https://doi.org/10.3390/jmse12040567