
Ocean-Current-Motion-Model-Based Routing Protocol for Void-Avoided UASNs


Abstract
:1. Introduction
- (1)
- We use the Gaussian radial basis function curve multiplied by multiple influence factors and tidal components of ocean currents to predict the ocean motion with limited coverage. The velocity vector of network nodes is calculated by this model to simulate the real-time node motion.
- (2)
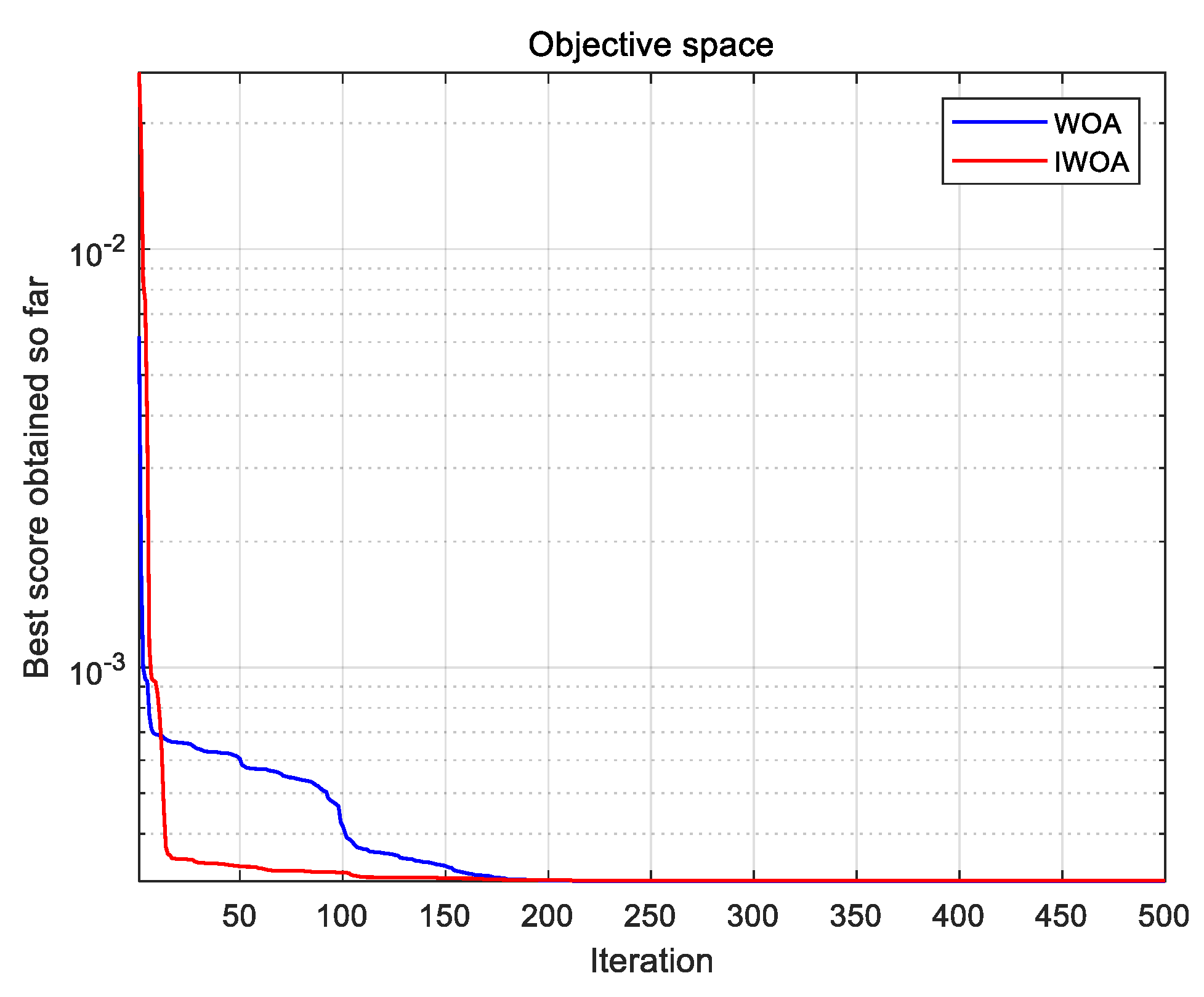
- We improve the WOA and design a protection radius with optimal outage probability so that we can search the alternative nodes within the limited protection radius and improve the convergence rate of the traditional WOA.
- (3)
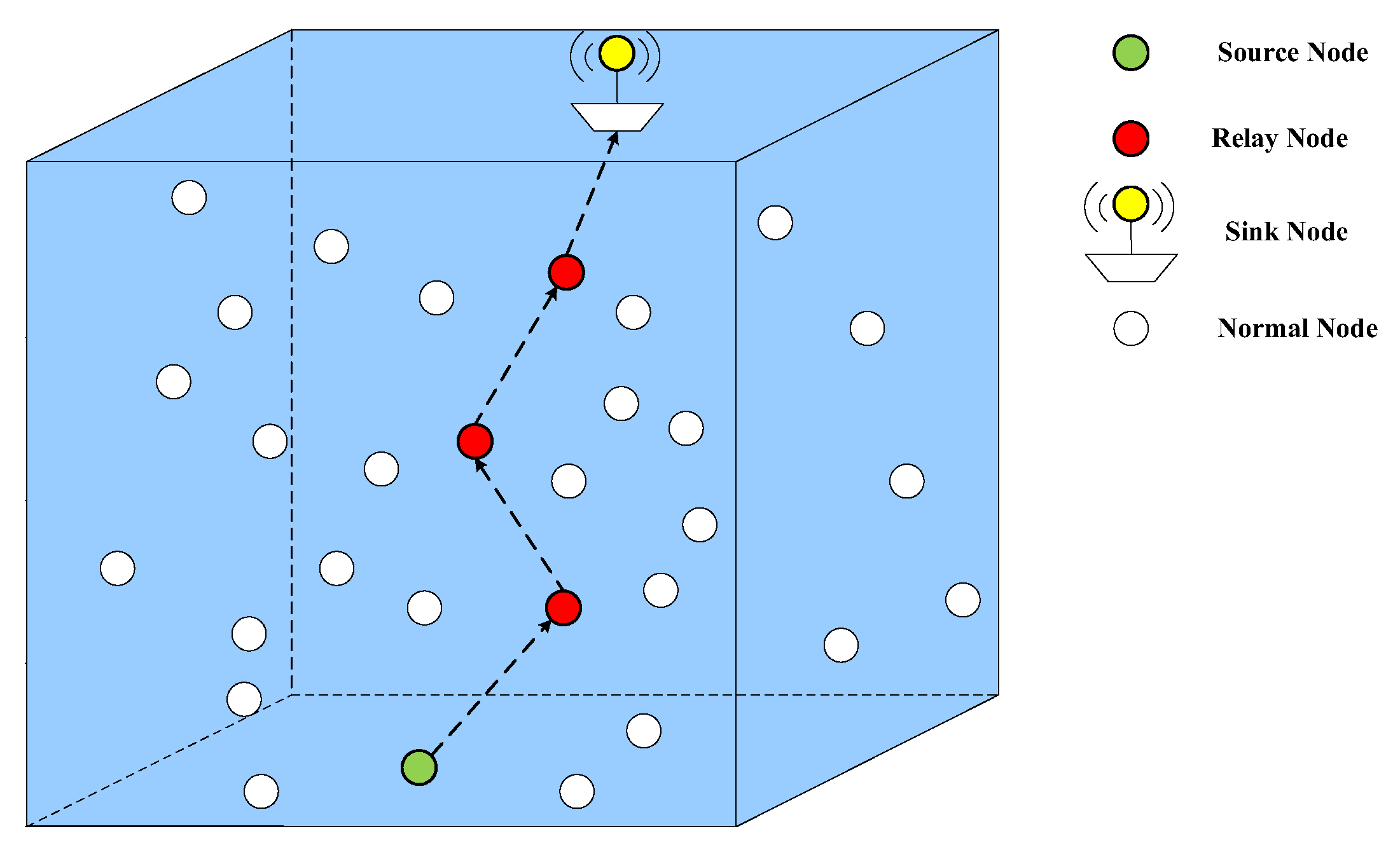
- We design the void avoided strategy to suppress the problem of the routing void. In addition, the OCMR can select the optimal relay node in the candidate forwarding set and rapidly rebuild a new route to avoid retransmission when the void occurs.
2. Related Research
3. Preliminary Investigations
3.1. Traditional WOA
3.1.1. Encircling Prey
3.1.2. Bubble-Net Attacking Method (Exploitation Phase)
3.1.3. Search for Prey (Exploration Phase)
3.2. Ocean Current Motion Model
4. OCMR Protocol
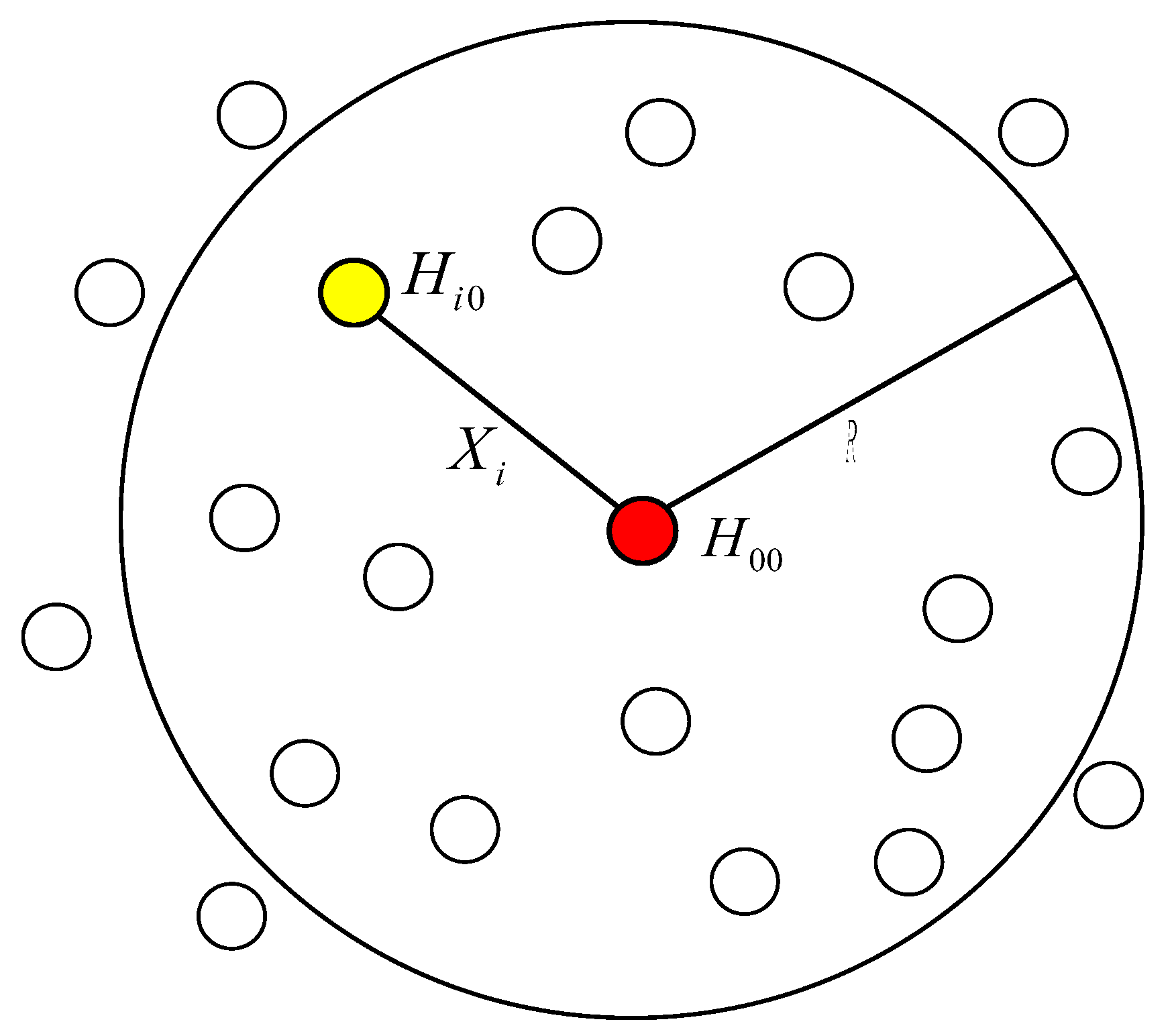
4.1. Protection Radius-Based Construction of the Candidate Forwarding Set
4.2. Optimal Speed-Based Relay Node Selection Algorithm
4.3. Searching Process of the Optimal Relay Node
 and
and  represent nodes within opposing groups, and the phase difference between them is .
represent nodes within opposing groups, and the phase difference between them is .  indicates the nodes outside the search coverage. Assuming there is a node in , then the opposite node is written as . We suppose is a node in the d-dimensional space, where ; the opposite node can be shown as , where . Subsequently, the opposing population is expressed as
indicates the nodes outside the search coverage. Assuming there is a node in , then the opposite node is written as . We suppose is a node in the d-dimensional space, where ; the opposite node can be shown as , where . Subsequently, the opposing population is expressed as
| Algorithm 1. Searching process of optimal relay node |
| – : candidate forwarding set based on – : node with velocity V*I – : maximum number of iterations Input: The parameters of nodes including , , , , and Output: Vi. 1: Initialize the whale population and velocity Vi 2: Calculate the protection radius with optimal outage probability by (19) 3: Generate the opposing population by (29) and (30) 4: while (t < ) 5: for 6: Calculate the fitness value to reinitialize population 7: Update the optimal velocity by (32) 8: for each search agent 9: update parameters , A, C, , and Q 10: if1 (Q < 0.5) 11: if2 (|A| < 1) 12: Update the position of the current search agent by Equation (25) 13: else if2 (|A| ≥ 1) 14: Update the position of the current search agent by Equation (28) 15: end if2 16: else if1 (Q ≥ 0.5) 17: Update the position of the current search agent by Equation (26) 18: end if1 19: end for 20: end for 21: for do 22: Update and calculate 23: end for 24: Calculate the fitness by Equation (31) 25: Update V* when a better solution is obtained 26: t = t + 1 27: end while 28: Return V*i |
4.4. Void Avoided Strategy
5. Performance Simulation and Analysis
5.1. Simulation Setting
5.2. Performance Comparison
5.2.1. Influence of the Node Density
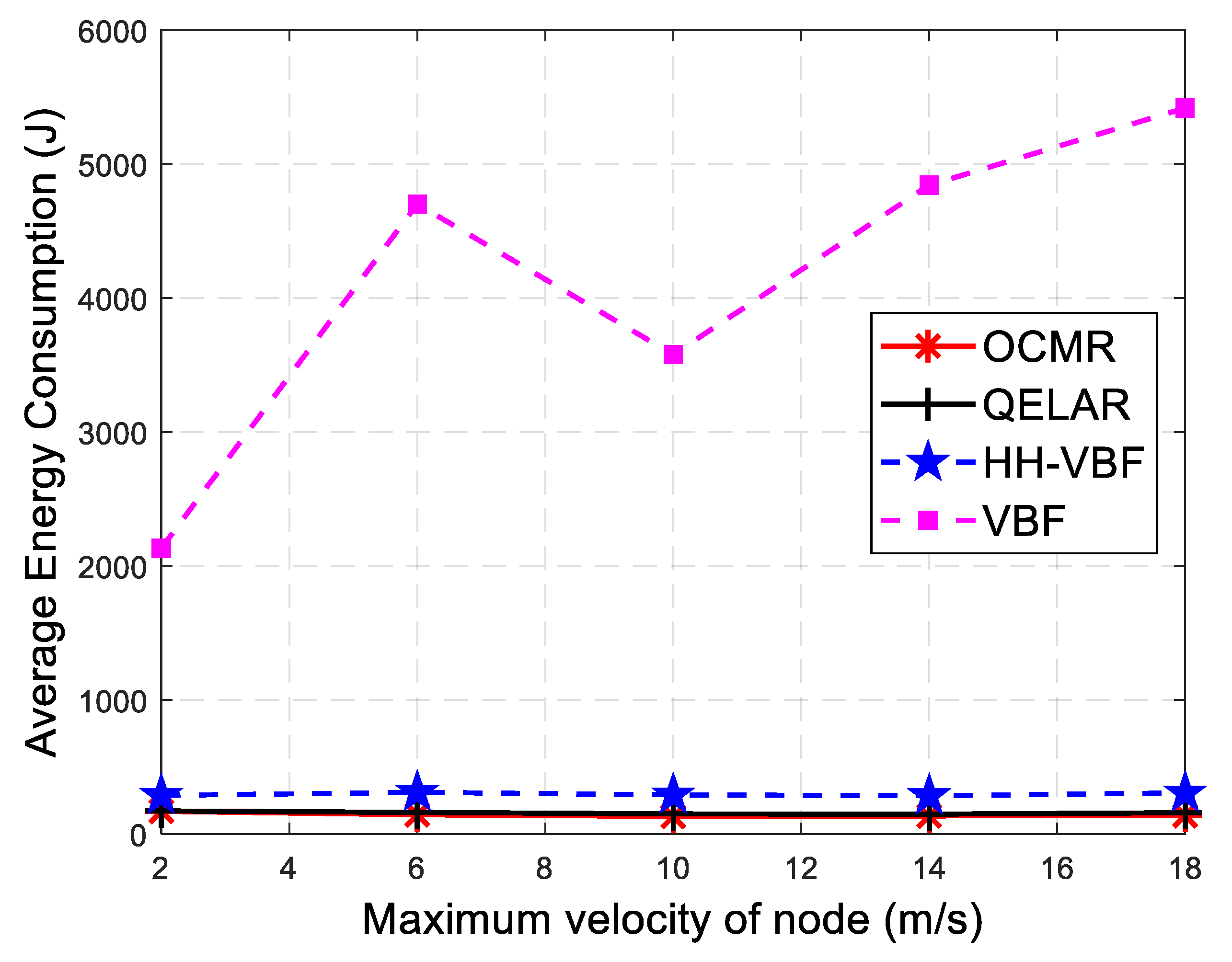
5.2.2. Influence of the Node Maximum Moving Velocity
5.2.3. Influence of the Node Initial Energy
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Luo, H.; Wu, K.; Ruby, R.; Liang, Y.; Guo, Z.; Ni, L.M. Softwaredefined architectures and technologies for underwater wireless sensor networks: A survey. IEEE Commun. Surveys Tuts. 2018, 20, 2856–2888. [Google Scholar] [CrossRef]
- Shahini, A.; Kiani, A.; Ansari, N. Energy efficient resource allocation in EH-enabled CR networks for IoT. IEEE Internet Things J. 2019, 6, 3186–3193. [Google Scholar] [CrossRef]
- Bujari, A.; Gaggi, O.; Palazzi, C.E.; Ronzani, D. Would current adhoc routing protocols be adequate for the Internet of Vehicles? A comparative study. IEEE Internet Things J. 2018, 5, 3683–3691. [Google Scholar] [CrossRef]
- Fattah, S.; Gani, A.; Ahmedy, I.; Idris, M.Y.I.; Hashem, I.A.T. A survey on underwater wireless sensor networks: Requirements, taxonomy, recent advances, and open research challenges. Sensors 2020, 20, 5393. [Google Scholar] [CrossRef] [PubMed]
- Kheirabadi, M.T.; Mohamad, M.M. Greedy routing in underwater acoustic sensor networks: A survey. Int. J. Distrib. Sens. Netw. 2013, 9. [Google Scholar] [CrossRef]
- Zhang, W.; Han, G.; Wang, X.; Guizani, M.; Fan, K.; Shu, L. A node location algorithm based on node movement prediction in underwater acoustic sensor networks. IEEE Trans. Veh. Technol. 2020, 69, 3166–3178. [Google Scholar] [CrossRef]
- Khan, Z.A.; Awais, M.; Alghamdi, T.A.; Khalid, A.; Fatima, A.; Akbar, M.; Javaid, N. Region aware proactive routing approaches exploiting energy efficient paths for void hole avoidance in underwater WSNs. IEEE Access 2019, 7, 140703–140722. [Google Scholar] [CrossRef]
- Sher, A.; Khan, A.; Javaid, N.; Ahmed, S.; Aalsalem, M.; Khan, W. Void hole avoidance for reliable data delivery in IoT enabled underwater wireless sensor networks. Sensors 2018, 18, 3271. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Yang, P.; Wang, Y.; Shen, W.; Yang, J.; Wang, J.; Ye, K.; Zhou, M.; Sun, H. A Novel Multireceiver SAS RD Processor. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–11. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, H.; Sun, H.; Ying, W. Multireceiver SAS imagery based on monostatic conversion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10835–10853. [Google Scholar] [CrossRef]
- Yang, P. An imaging algorithm for high-resolution imaging sonar system. Multimed. Tools Appl. 2023, 83, 31957–31973. [Google Scholar] [CrossRef]
- Zhang, X. An efficient method for the simulation of multireceiver SAS raw signal. Multimed. Tools Appl. 2023, 1–18. [Google Scholar] [CrossRef]
- Tuna, G.; Gungor, V.C. A survey on deployment techniques, localization algorithms, and research challenges for underwater acoustic sensor networks. Int. J. Commun. Syst. 2017, 30, e3350. [Google Scholar] [CrossRef]
- Gong, Z.; Li, C.; Su, R. Fundamental Limits of Doppler Shift-Based, ToA-Based, and TDoA-Based Underwater Localization. IEEE/CAA J. Autom. Sin. 2023, 10, 1637–1639. [Google Scholar] [CrossRef]
- Zhang, B.; Zhu, J.; Wu, Y.; Zhang, W.; Zhu, M. Underwater localization using differential doppler scale and TDOA measurements with clock imperfection. Wirel. Commun. Mob. Comput. 2022, 2022, 6597132. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Jiang, J.; Han, G.; Lin, C. A survey on opportunistic routing protocols in the Internet of Underwater Things. Comput. Netw. 2023, 225, 109658. [Google Scholar] [CrossRef]
- Xie, P.; Cui, J.-H.; Lao, L. VBF: Vector-based forwarding proto-col for underwater sensor networks. In NETWORKING 2006. Networking Technologies, Services, and Protocols; Performance of Computer and Communication Networks; Mobile and Wireless Communications Systems; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2006; Volume 3976, pp. 1216–1221. [Google Scholar]
- Nicolaou, N.; See, A.; Peng, X.; Jun-Hong, C.; Maggiorini, D. Improving the robustness of location-based routing for underwater sensor networks. In Proceedings of the OCEANS 2007—Europe, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Otero, P.; Hernández-Romero, Á.; Luque-Nieto, M.Á.; Ariza, A. Underwater Positioning System Based on Drifting Buoys and Acoustic Modems. J. Mar. Sci. Eng. 2023, 11, 682. [Google Scholar] [CrossRef]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-based routing for underwater sensor networks. In NETWORKING 2008 Ad Hoc and Sensor Networks, Wireless Networks, Next Generation Internet; Springer: Berlin/Heidelberg, Germany, 2008; pp. 72–86. [Google Scholar]
- Guan, Q.; Ji, F.; Liu, Y.; Yu, H.; Chen, W. Distance-vector based opportunistic routing for underwater acoustic sensor networks. IEEE Internet Things J. 2019, 6, 3831–3839. [Google Scholar] [CrossRef]
- Huang, C.-J.; Wang, Y.-W.; Liao, H.-H.; Lin, C.-F.; Hu, K.-W.; Chang, T.-Y. A power-efficient routing protocol for underwater wireless sensor networks. Appl. Soft Comput. J. 2011, 11, 2348–2355. [Google Scholar] [CrossRef]
- Liu, J.; Yu, M.; Wang, X.; Liu, Y.; Wei, X. RECRP: A reliable energy-efficient cross-layer routing protocol in UWSNs. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–4. [Google Scholar]
- Shah, S.; Khan, A.; Ali, I.; Ko, K.-M.; Mahmood, H. Localization free energy efficient and cooperative routing protocols for underwater wireless sensor networks. Symmetry 2018, 10, 498. [Google Scholar] [CrossRef]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energyefficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 7 January 2000; p. 223. [Google Scholar]
- Khan, W.; Wang, H.; Anwar, M.S.; Ayaz, M.; Ahmad, S.; Ullah, I. A multi-layer cluster based energy efficient routing scheme for UWSNs. IEEE Access 2019, 7, 77398–77410. [Google Scholar] [CrossRef]
- Jiang, S.; Member, S. On reliable data transfer in underwater acoustic networks: A survey from networking perspective. IEEE Commun. Surv. Tuts. 2018, 20, 1036–1055. [Google Scholar] [CrossRef]
- Jin, Z.; Ji, Z.; Su, Y. An evidence theory based opportunistic routing protocol for underwater acoustic sensor networks. IEEE Access 2018, 6, 71038–71047. [Google Scholar] [CrossRef]
- Hyder, W.; Pabani, J.K.; Luque-Nieto, M.Á.; Laghari, A.A.; Otero, P. Self-Organized Ad Hoc Mobile (SOAM) Underwater Sensor Networks. IEEE Sens. J. 2022, 23, 1635–1644. [Google Scholar] [CrossRef]
- Li, N.; Martínez, J.-F.; Chaus, J.M.M.; Eckert, M. A survey on underwater acoustic sensor network routing protocols. Sensors 2016, 16, 414. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, H.; Tong, S.; Wang, L. The improvement of ant colony al-gorithm and its application to tsp problem. In Proceedings of the 2009 5th International Conference on Wireless Communications, Networking and Mobile Computing, Beijing, China, 24–26 September 2009; pp. 1–4. [Google Scholar]
- Hu, T.; Fei, Y. QELAR: A machine-learning-based adaptive routing protocol for energy-efficient and lifetime-extended underwater sensor networks. IEEE Trans. Mob. Comput. 2010, 9, 796–809. [Google Scholar] [CrossRef]
- Lu, Y.; He, R.; Chen, X.; Lin, B.; Yu, C. Energy-efficient depth-based opportunistic routing with Q-learning for underwater wireless sensor networks. Sensors 2020, 20, 1025. [Google Scholar] [CrossRef]
- Olorunda, O.; Engelbrecht, A.P. Measuring exploration/exploitation in particle swarms using swarm diversity. In Proceedings of the 2008 IEEE Congress on Evolutionary Computation, CEC (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–6 June 2008; pp. 1128–1134. [Google Scholar]
- Alba, E.; Dorronsoro, B. The exploration/exploitation tradeoffin dynamic cellular genetic algorithms. IEEE Trans. Evol. Comput. 2005, 9, 126–142. [Google Scholar] [CrossRef]
- Lin, L.; Gen, M. Auto-tuning strategy for evolutionary algorithms: Balancing between exploration and exploitation. Soft Comput. 2009, 13, 157–168. [Google Scholar] [CrossRef]
- SBeerens, P.; Ridderinkhof, H.; Zimmerman, J. An Analytical Study of Chaotic Stirring in Tidal Areas. Chaos Solitons Fractals 1994, 4, 1011–1029. [Google Scholar] [CrossRef]
- Xie, P.; Zhou, Z.; Peng, Z.; Yan, H.; Hu, T.; Cui, J.-H.; Shi, Z.; Fei, Y.; Zhou, S. Aqua-Sim: An NS-2 based simulator for underwater sensor networks. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–7. [Google Scholar]
- Issariyakul, T.; Hossain, E. Introduction to Network Simulator 2 (NS2); Springer: Boston, MA, USA, 2012. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Num | Range | f min |
|---|---|---|---|
| 30 | [−100,100] | 0 | |
| 30 | [−10,10] | 0 | |
| 30 | [−100,100] | 0 | |
| 30 | [−1.28,1.28] | 0 | |
| 30 | [−500,500] | −418.9829 × 5 | |
| 30 | [−5.12,5.12] | 0 | |
| 30 | [−50,50] | 0 |
| Function | IWOA | WOA | PSO | GSA | ||||
|---|---|---|---|---|---|---|---|---|
| Avg | Std | Avg | Std | Avg | Std | Avg | Std | |
| F1 | 5.3597 × 10−34 | 4.2268 × 10−18 | 1.41 × 10−30 | 4.91 × 10−30 | 0.000136 | 0.000202 | 2.53 × 10−16 | 9.67 × 10−17 |
| F2 | 2.0685 × 10−23 | 2.0727 × 10−23 | 1.06 × 10−21 | 2.39 × 10−21 | 0.042144 | 0.045421 | 0.055655 | 0.194074 |
| F3 | 1.8898 | 2.2742 | 3.116266 | 0.532429 | 0.000102 | 8.28 × 10−5 | 2.5 × 10−16 | 1.74 × 10−16 |
| F4 | 0.00021516 | 0.009757 | 0.001425 | 0.001149 | 0.122854 | 0.044957 | 0.089441 | 0.04339 |
| F5 | −5879.313 | 600.97165 | −5080.76 | 695.7968 | −4841.29 | 1152.814 | −2821.07 | 493.0375 |
| F6 | 0 | 2.98065 × 10−9 | 0 | 0 | 46.70423 | 11.62938 | 25.96841 | 7.470068 |
| F7 | 0.72669 | 1.67734 | 0.339676 | 0.214864 | 0.006917 | 0.026301 | 1.799617 | 0.95114 |
| Parameters | Values |
|---|---|
| UASNs deployment space | 800 m × 800 m × 800 m |
| Simulation time | 500 s |
| Communication range | 100 m |
| Transmission power | 2 W |
| Receiving power | 0.75 W |
| Idle power | 8 m W |
| Acoustic speed | 1500 m/s |
| Node minimum velocity | 0.2 m/s |
| Packet size | 50 Bytes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, Z.; Li, Y.; Sun, H.; Hong, S.; Sun, S. Ocean-Current-Motion-Model-Based Routing Protocol for Void-Avoided UASNs. J. Mar. Sci. Eng. 2024, 12, 537. https://doi.org/10.3390/jmse12040537
Tan Z, Li Y, Sun H, Hong S, Sun S. Ocean-Current-Motion-Model-Based Routing Protocol for Void-Avoided UASNs. Journal of Marine Science and Engineering. 2024; 12(4):537. https://doi.org/10.3390/jmse12040537
Chicago/Turabian StyleTan, Zhicheng, Yun Li, Haixin Sun, Shaohua Hong, and Shanlin Sun. 2024. "Ocean-Current-Motion-Model-Based Routing Protocol for Void-Avoided UASNs" Journal of Marine Science and Engineering 12, no. 4: 537. https://doi.org/10.3390/jmse12040537