
An Application of 3D Cross-Well Elastic Reverse Time Migration Imaging Based on the Multi-Wave and Multi-Component Technique in Coastal Engineering Exploration


Abstract
:1. Introduction
2. Methodology
2.1. 3D Elastic Wave Equations of Motion and Grid Discretization
2.2. Elastic Wave Decomposition
2.2.1. Wave Equation Decoupling Method
2.2.2. Auxiliary Variables Method
2.3. Cross-Correlation Imaging Condition
2.3.1. Imaging by Vector Velocity Fields
2.3.2. Imaging by Scalar and Vector Potentials
2.3.3. Imaging by Pure Vector P- and S-Waves
2.3.4. Imaging by Scalarizing Vector Wavefields
2.4. Denoising of the RTM Imaging Results
3. Verifications and Discussion
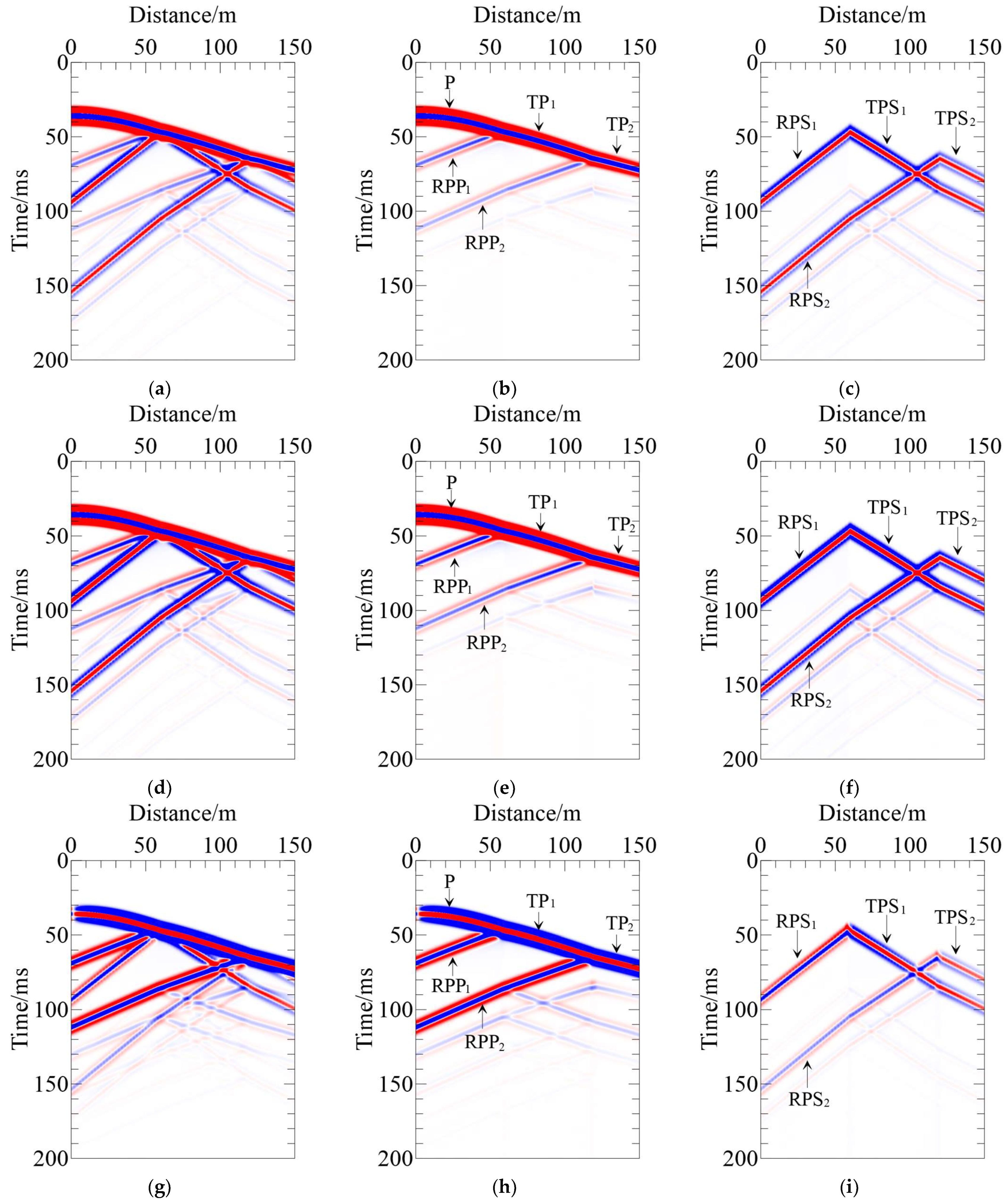
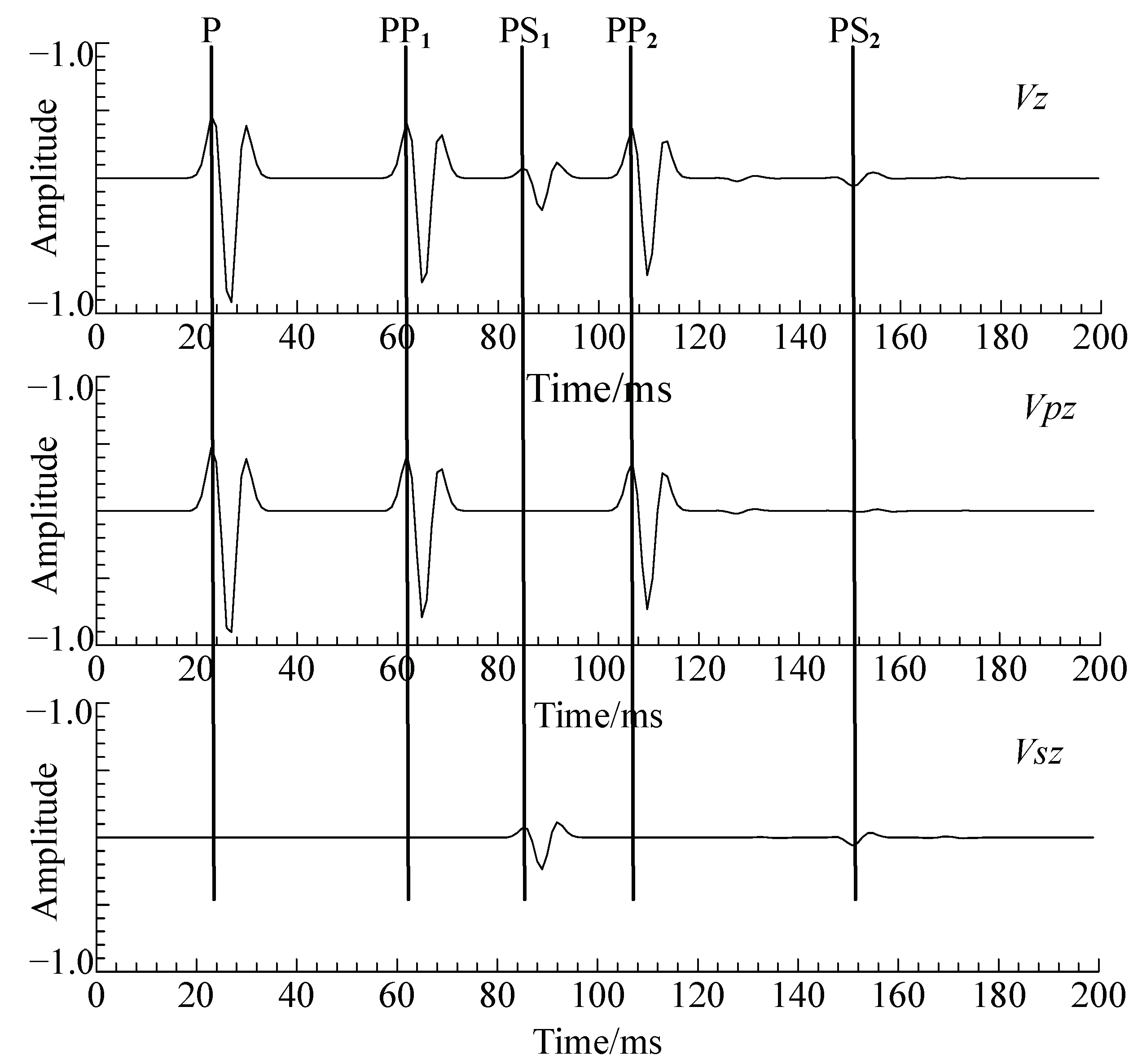
3.1. Discussion on Vector Decoupling for Elastic Wave Separation
3.2. Discussion on the Imaging Results under Various Imaging Conditions
3.2.1. Imaging Results Obtained Utilizing Vector Velocity Fields
3.2.2. Imaging Results Obtained Utilizing Scalar and Vector Potentials
3.2.3. Imaging Results Obtained Using Pure Vector P- and S-Wave
3.2.4. Imaging Results Obtained Using Scalarizing Vector Wavefields
3.3. RTM Imaging Artifacts Attenuation
4. Multiple Sensors Cross-Well 3D RTM Image Results and Analysis
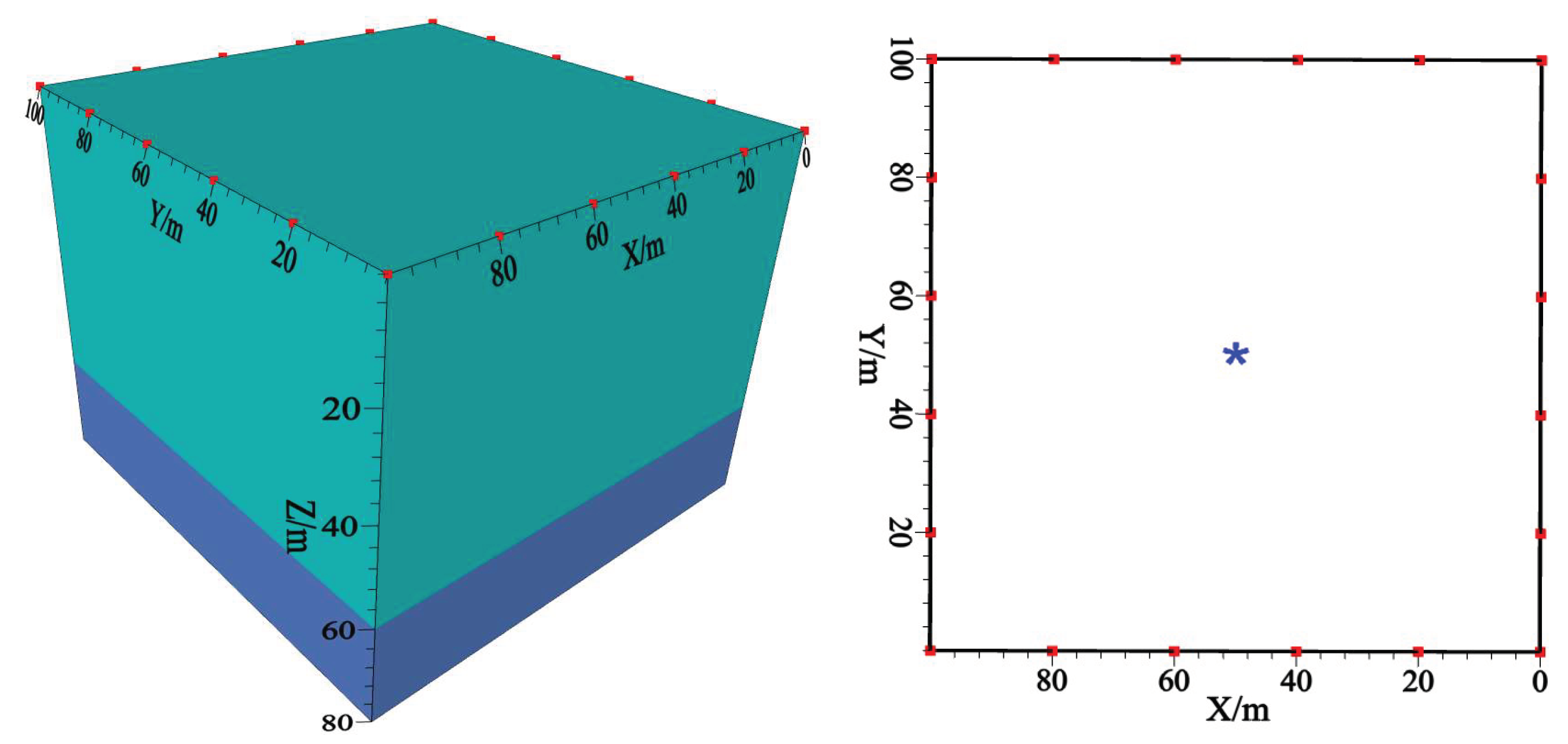
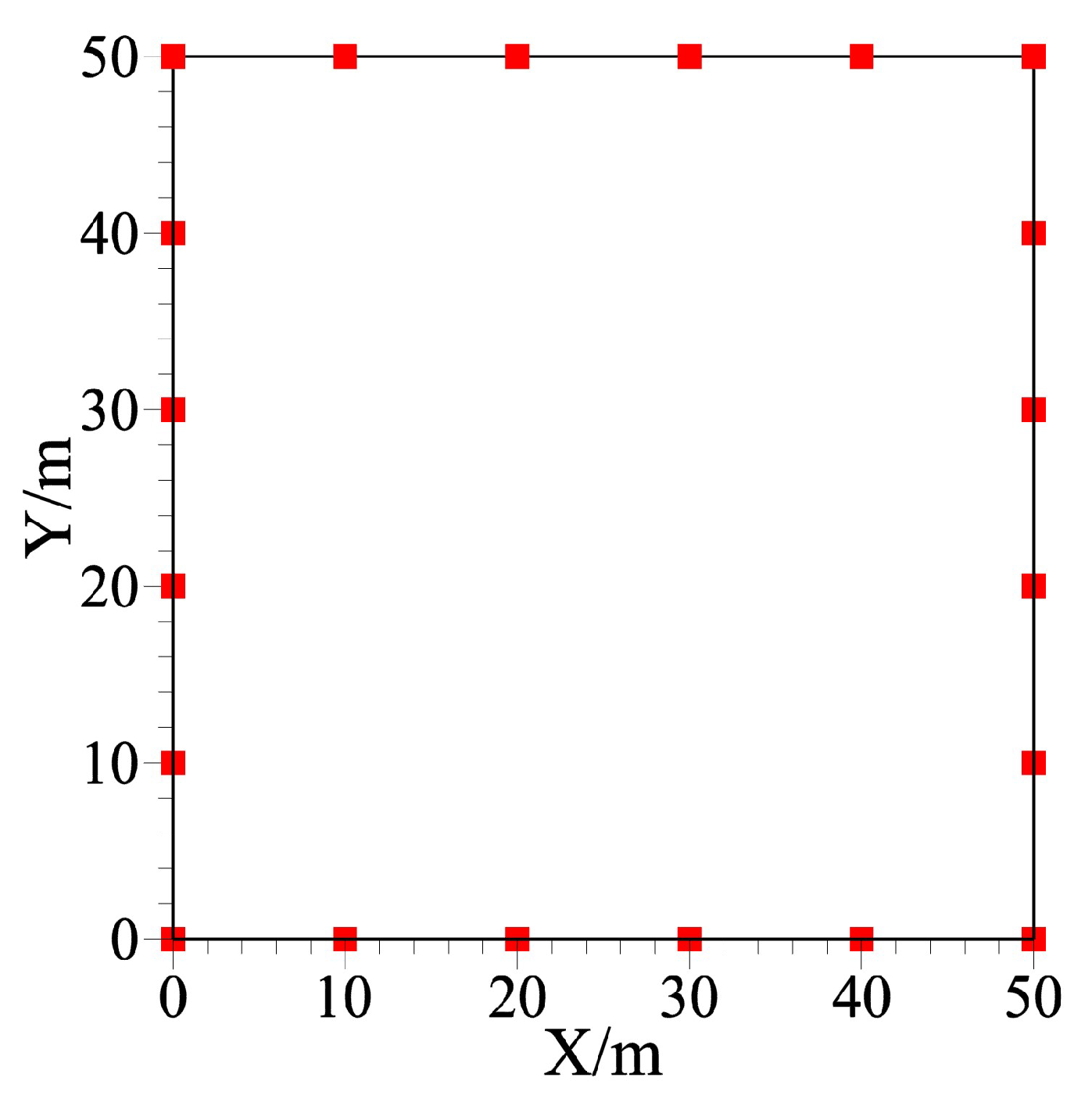
4.1. Sensor Settings and Observation System
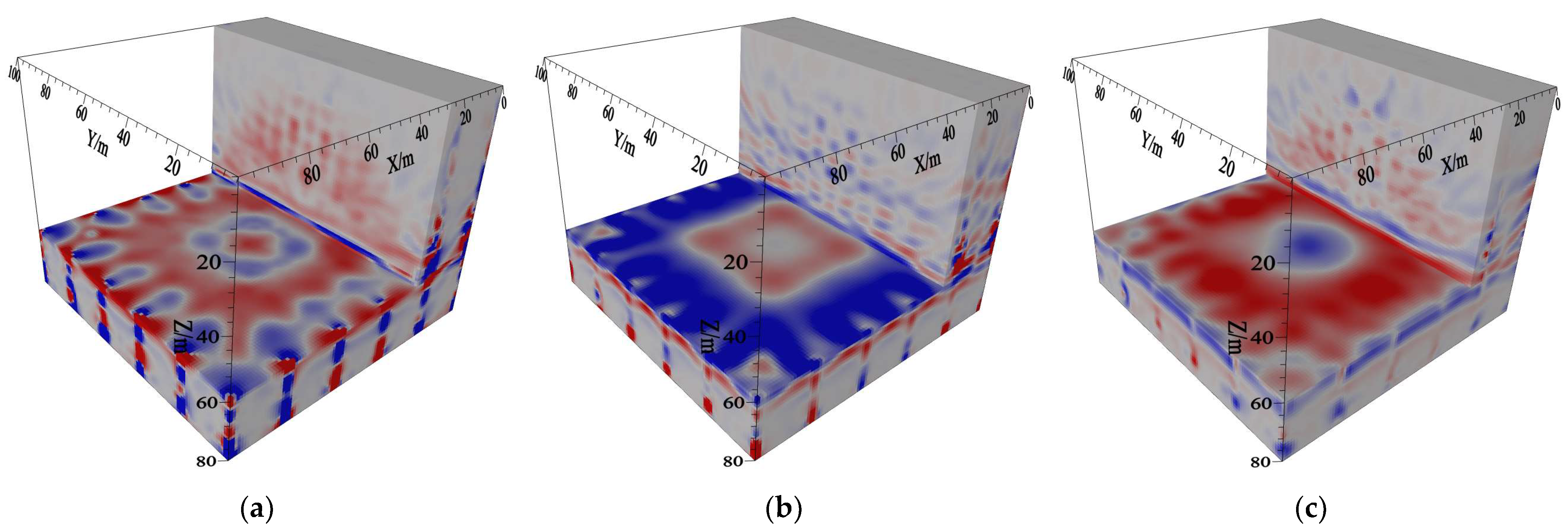
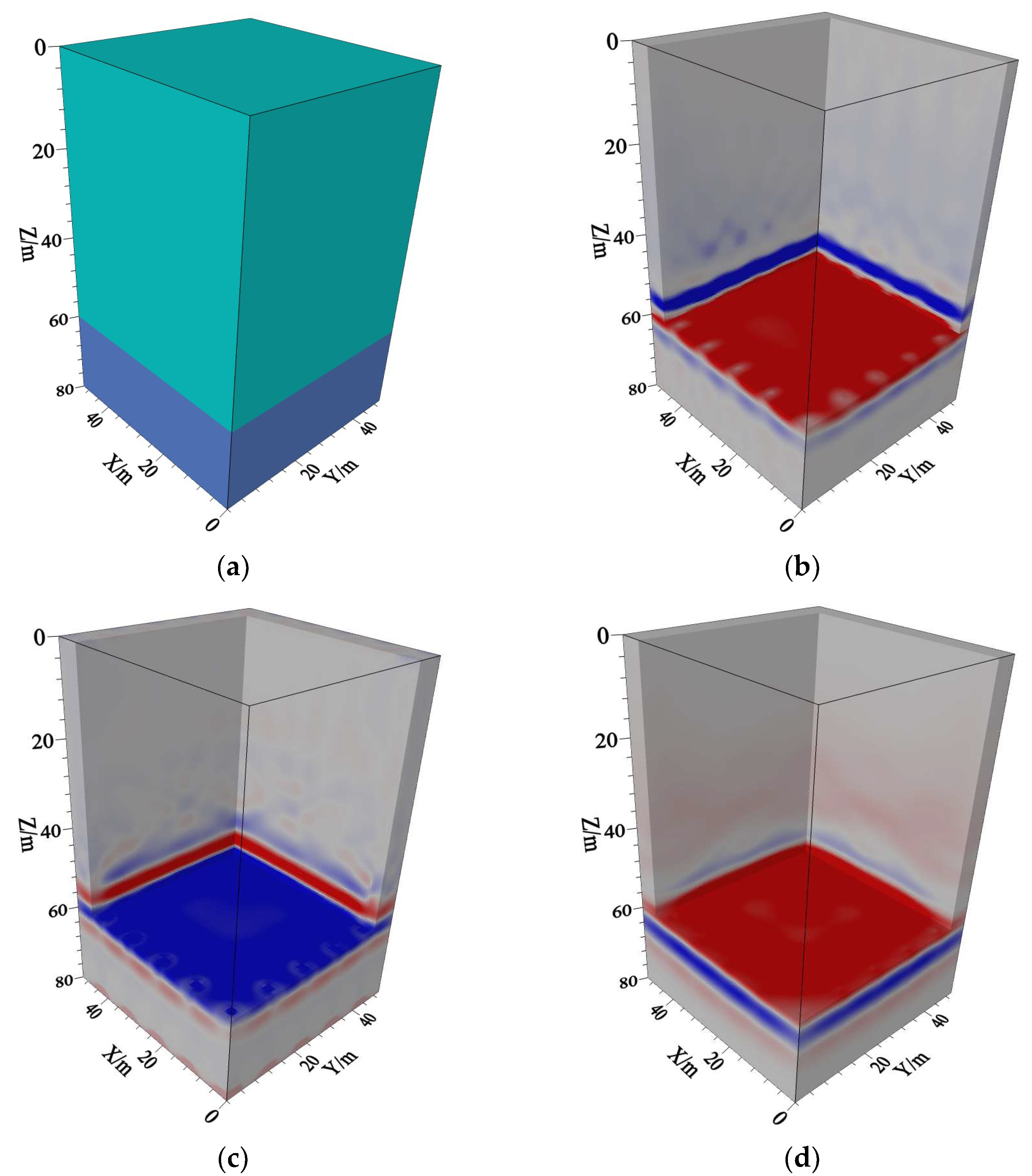
4.2. Layered Medium Model
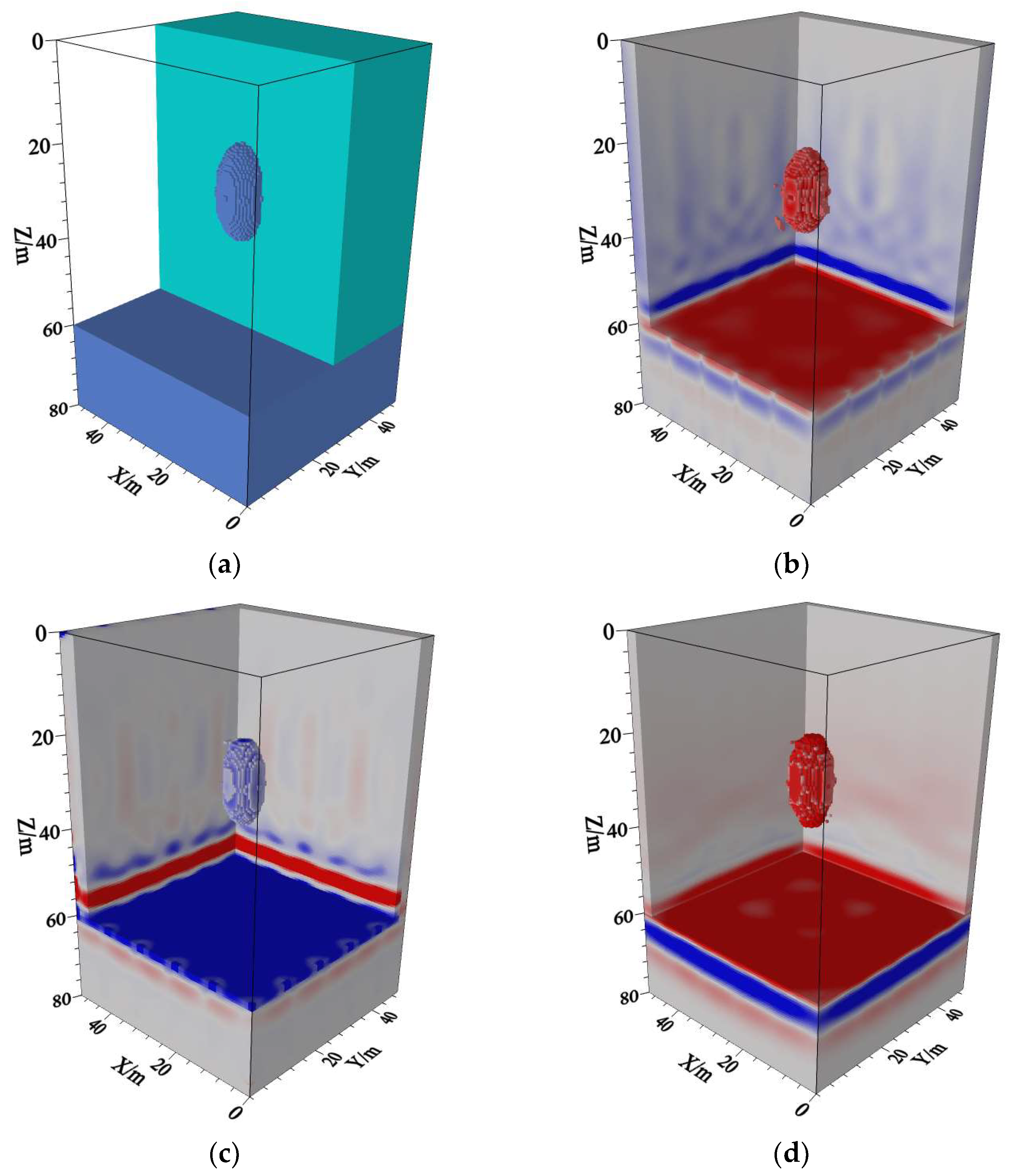
4.3. High-Velocity Ellipsoid Boulder Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Glossary
| Seismic waves | Seismic waves refer to the propagating vibrations generated during an earthquake. Seismic waves can be classified into two main types: body waves and surface waves. Body waves are the waves that propagate through the Earth’s interior and include compressional waves (P-waves) and shear waves (S-waves). |
| P-waves | Compressional waves, also known as P-waves or primary waves, are longitudinal waves that cause particles in the material to move in the same direction as the wave propagation. |
| S-waves | Shear waves, also known as S-waves or secondary waves, are transverse waves that cause particles to move perpendicular to the direction of wave propagation. |
| Reverse time migration (RTM) | RTM is a seismic imaging technique used to generate high-resolution subsurface images in geophysics and exploration geology. |
| Cross-well seismic exploration | Cross-well seismic exploration is a geophysical technique used to obtain detailed subsurface information between two or more wells. |
| Imaging conditions | In seismic imaging, imaging conditions refer to the mathematical relationships and criteria used to convert seismic data into subsurface images. |
| Elastic wave decomposition | Elastic wave decomposition is a technique used in seismic data processing to separate the recorded seismic data into its constituent wave modes. It aims to isolate and analyze the individual components of the seismic wavefield, such as compressional (P) waves and shear (S) waves. |
| Amplitude variation with angle (AVA) | AVA is a phenomenon observed in seismic data where the amplitude of reflected seismic waves changes as a function of the angle of incidence and reflection at interfaces within the subsurface. It is an important attribute used in seismic analysis to infer properties of subsurface rock formations and fluid content. |
| Sensor settings | In seismic exploration Sensor settings refer to the settings of the geophone. A geophone is a type of sensor used in seismic exploration and monitoring to detect and measure ground vibrations caused by seismic waves. It is a critical component in seismic data acquisition systems and plays a fundamental role in studying the Earth’s subsurface. |
References
- Esteban, M.D.; López-Gutiérrez, J.-S.; Negro, V.; Neves, M.G. Coastal Engineering: Sustainability and New Technologies. J. Mar. Sci. Eng. 2023, 11, 1562. [Google Scholar] [CrossRef]
- Sun, Q.; Wang, Q.; Shi, F.; Alves, T.; Gao, S.; Xie, X.; Wu, S.; Li, J. Runup of landslide-generated tsunamis controlled by paleogeography and sea-level change. Commun. Earth Environ. 2022, 3, 244. [Google Scholar] [CrossRef]
- Dong, Y. Reseeding of particles in the material point method for soil–structure interactions. Comput. Geotech. 2020, 127, 103716. [Google Scholar] [CrossRef]
- Wang, H.; Lin, J.; Dong, X.; Lu, S.; Li, Y.; Yang, B. Seismic velocity inversion transformer. Geophysics 2023, 88, R513–R533. [Google Scholar] [CrossRef]
- Nakata, R.; Jang, U.; Lumley, D.; Mouri, T.; Nakatsukasa, M.; Takanashi, M.; Kato, A. Seismic Time-Lapse Monitoring of Near-Surface Microbubble Water Injection by Full Waveform Inversion. Geophys. Res. Lett. 2022, 49, e2022GL098734. [Google Scholar] [CrossRef]
- Wang, W.; Ma, J. Velocity model building in a crosswell acquisition geometry with image-trained artificial neural networks. Geophysics 2020, 85, U31–U46. [Google Scholar] [CrossRef]
- Habib, M.A.; Zarillo, G.A. Construction of a Real-Time Forecast Model for Coastal Engineering and Processes Nested in a Basin Scale Model. J. Mar. Sci. Eng. 2023, 11, 1263. [Google Scholar] [CrossRef]
- Liu, J.P.; Wang, Y.Y.; Liu, Z.; Pan, X.K.; Zong, Y.Q. Progress and application of near-surface reflection and refraction method. Chin. J. Geophys. 2015, 58, 3286–3305. [Google Scholar]
- Lu, A.; Asli, B.H.S. Seismic Image Identification and Detection Based on Tchebichef Moment Invariant. Electronics 2023, 12, 3692. [Google Scholar] [CrossRef]
- Huang, G.; Chen, X.; Luo, C.; Bai, M.; Chen, Y. Time-lapse seismic difference-and-joint prestack AVA inversion. IEEE Trans. Geosci. Remote Sens. 2020, 59, 9132–9143. [Google Scholar] [CrossRef]
- Li, G.; Cai, H.; Li, C.F. Alternating joint inversion of controlled-source electromagnetic and seismic data using the joint total variation constraint. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5914–5922. [Google Scholar] [CrossRef]
- da Silva, J.A., Jr.; Poliannikov, O.V.; Fehler, M.; Turpening, R. Modeling scattering and intrinsic attenuation of crosswell seismic data in the Michigan Basin. Geophysics 2018, 83, WC15–WC27. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, Z.; Wang, L.; Cui, H.; Xie, X.; Wu, H.; Liu, X.; Gao, B.; Wang, H.; Xiang, P. A Quasi-Distributed optic fiber sensing approach for interlayer performance analysis of ballastless Track-Type II plate. Opt. Laser Technol. 2024, 170, 110237. [Google Scholar] [CrossRef]
- Angioni, T.; Rechtien, R.D.; Cardimona, S.J.; Luna, R. Crosshole seismic tomography and borehole logging for engineering site characterization in Sikeston, MO, USA. Tectonophysics 2003, 368, 119–137. [Google Scholar] [CrossRef]
- Chen, H.; Hu, Y.; Jin, J.; Ran, Q.; Yan, L. Fine stratigraphic division of volcanic reservoir by uniting of well data and seismic data—Taking volcanic reservoir of member one of Yingcheng Formation in Xudong area of Songliao Basin for an example. J. Earth Sci. 2014, 25, 337–347. [Google Scholar] [CrossRef]
- Sagong, M.; Park, C.S.; Lee, B.; Chun, B.-S. Cross-hole seismic technique for assessing in situ rock mass conditions around a tunnel. Int. J. Rock Mech. Min. Sci. 2012, 53, 86–93. [Google Scholar] [CrossRef]
- Marelli, S.; Manukyan, E.; Maurer, H.; Greenhalgh, S.A.; Green, A.G. Appraisal of waveform repeatability for crosshole and hole-to-tunnel seismic monitoring of radioactive waste repositories. Geophysics 2010, 75, Q21–Q34. [Google Scholar] [CrossRef]
- Lin, J.; Ma, R.; Sun, Z.; Tang, L. Assessing the connectivity of a regional fractured aquifer based on a hydraulic conductivity field reversed by multi-well pumping tests and numerical groundwater flow modeling. J. Earth Sci. 2023, 34, 1926–1939. [Google Scholar] [CrossRef]
- Pongrac, B.; Gleich, D.; Malajner, M.; Sarjaš, A. Cross-Hole GPR for Soil Moisture Estimation Using Deep Learning. Remote Sens. 2023, 15, 2397. [Google Scholar] [CrossRef]
- Binley, A.; Hubbard, S.S.; Huisman, J.A.; Revil, A.; Robinson, D.A.; Singha, K.; Slater, L.D. The emergence of hydrogeophysics for improved understanding of subsurface processes over multiple scales. Water Resour. Res. 2015, 51, 3837–3866. [Google Scholar] [CrossRef]
- Liu, Q.; Hu, L.; Bayer, P.; Xing, Y.; Qiu, P.; Ptak, T.; Hu, R. A numerical study of slug tests in a three-dimensional heterogeneous porous aquifer considering well inertial effects. Water Resour. Res. 2020, 56, e2020WR027155. [Google Scholar] [CrossRef]
- Zhai, J.; Wang, Q.; Xie, X.; Qin, H.; Zhu, T.; Jiang, Y.; Ding, H. A New Method for 3D Detection of Defects in Diaphragm Walls during Deep Excavations Using Cross-Hole Sonic Logging and Ground-Penetrating Radar. J. Perform. Constr. Facil. 2023, 37, 04022065. [Google Scholar] [CrossRef]
- Luo, N.; Zhao, Z.; Illman, W.A.; Zha, Y.; Mok, C.M.W.; Yeh, T.-C.J. Three-Dimensional Steady-State Hydraulic Tomography Analysis with Integration of Cross-Hole Flowmeter Data at a Highly Heterogeneous Site. Water Resour. Res. 2023, 59, e2022WR034034. [Google Scholar] [CrossRef]
- White, D.; Daley, T.M.; Paulsson, B.; Harbert, W. Borehole seismic methods for geologic CO2 storage monitoring. Lead. Edge 2021, 40, 434–441. [Google Scholar] [CrossRef]
- Liu, X.; Liu, S.; Tian, S.; Zhao, Q.; Lu, Q.; Wang, K. Slowness High-resolution Tomography of Cross-hole Radar Based on Deep Learning. IEEE Geosci. Remote Sens. Lett. 2024, 21, 3000505. [Google Scholar] [CrossRef]
- Becht, A.; Bürger, C.; Kostic, B.; Appel, E.; Dietrich, P. High-resolution aquifer characterization using seismic cross-hole tomography: An evaluation experiment in a gravel delta. J. Hydrol. 2007, 336, 171–185. [Google Scholar] [CrossRef]
- Cheng, F.; Peng, D.; Yang, S. 3D Reverse-Time Migration Imaging for Multiple Cross-Hole Research and Multiple Sensor Settings of Cross-Hole Seismic Exploration. Sensors 2024, 24, 815. [Google Scholar] [CrossRef]
- Cheng, F.; Liu, J.; Wang, J.; Zong, Y.; Yu, M. Multi-hole seismic modeling in 3-D space and cross-hole seismic tomography analysis for boulder detection. J. Appl. Geophys. 2016, 134, 246–252. [Google Scholar] [CrossRef]
- Wang, H.; Lin, C.P.; Liu, H.C. Pitfalls and refinement of 2D cross-hole electrical resistivity tomography. J. Appl. Geophys. 2020, 181, 104143. [Google Scholar] [CrossRef]
- Bae, H.S.; Kim, W.-K.; Son, S.-U.; Park, J.-S. Imaging of Artificial Bubble Distribution Using a Multi-Sonar Array System. J. Mar. Sci. Eng. 2022, 10, 1822. [Google Scholar] [CrossRef]
- Zhong, Y.; Gu, H.; Liu, Y.; Luo, X.; Mao, Q. Elastic reverse time migration method in vertical transversely isotropic media including surface topography. Geophys. Prospect. 2022, 70, 1528–1555. [Google Scholar] [CrossRef]
- Shin, Y.; Ji, H.-G.; Park, S.-E.; Oh, J.-W. 4D Seismic Monitoring with Diffraction-Angle-Filtering for Carbon Capture and Storage (CCS). J. Mar. Sci. Eng. 2023, 11, 57. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, X.; Harris, J.M.; Zhou, H. Crosswell seismic imaging using Q-compensated viscoelastic reverse time migration with explicit stabilization. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Cao, L.; Li, X.; Cao, H.; Liu, L.; Wei, T.; Yang, X. 3-D Crosswell electromagnetic inversion based on IRLS norm sparse optimization algorithms. J. Appl. Geophys. 2023, 214, 105072. [Google Scholar] [CrossRef]
- Li, X.; Lei, X.; Li, Q.; Chen, D. Influence of bedding structure on stress-induced elastic wave anisotropy in tight sandstones. J. Rock Mech. Geotech. Eng. 2021, 13, 98–113. [Google Scholar] [CrossRef]
- Sun, R.; McMechan, G.A.; Hsiao, H.; Chow, J. Separating P- and S-waves in prestack 3D elastic seismograms using divergence and curl. Geophysics 2004, 69, 286–297. [Google Scholar] [CrossRef]
- Sun, R.; McMechan, G.A.; Lee, C.-S.; Chow, J.; Chen, C.-H. Prestack scalar reverse-time depth migration of 3D elastic seismic data. Geophysics 2006, 71, S199–S207. [Google Scholar] [CrossRef]
- Zong, Z.; Ji, L. Model parameterization and amplitude variation with angle and azimuthal inversion in orthotropic media. Geophysics 2021, 86, R1–R14. [Google Scholar] [CrossRef]
- Asli, B.H.S.; Flusser, J.; Zhao, Y. 2-D Generating Function of the Zernike Polynomials and their Application for Image Classification. In Proceedings of the 2019 Ninth International Conference on Image Processing Theory, Tools and Applications (IPTA), Istanbul, Turkey, 6–9 November 2019; pp. 1–6. [Google Scholar]
- Alterman, Z.; Karal, F.C. Propagation of elastic waves in layered media by finite difference methods. Bull. Seismol. Soc. Am. 1968, 58, 367–398. [Google Scholar]
- Furumura, T.; Takenaka, H. A wraparound elimination technique for the pseudospectral wave synthesis using an antiperiodic extension of the wavefield. Geophysics 1995, 60, 302–307. [Google Scholar] [CrossRef]
- Tan, C.J.; Aslian, A.; Honarvar, B.; Puborlaksono, J.; Yau, Y.H.; Chong, W.T. Estimating surface hardening profile of blank for obtaining high drawing ratio in deep drawing process using FE analysis. IOP Conf. Ser. Mater. Sci. Eng. 2015, 103, 012047. [Google Scholar] [CrossRef]
- Seriani, G.; Priolo, E. Spectral element method for acoustic wave simulation in heterogeneous media. Finite Elem. Anal. Des. 2012, 16, 337–348. [Google Scholar] [CrossRef]
- Bouchon, M.; Campillo, M.; Gaffet, S. A boundary integral equation-discrete wavenumber representation method to study wave propagation in multilayered media having irregular interfaces. Geophysics 1989, 54, 1134–1140. [Google Scholar] [CrossRef]
- Pan, X.; Lu, C.; Zhang, G.; Wang, P.; Liu, J. Seismic characterization of naturally fractured reservoirs with monoclinic symmetry induced by horizontal and tilted fractures from amplitude variation with offset and azimuth. Surv. Geophys. 2022, 43, 815–851. [Google Scholar] [CrossRef]
- Chen, J.B.; Cao, J. An average-derivative optimal scheme for modeling of the frequency-domain 3D elastic wave equation. Geophysics 2018, 83, T209–T234. [Google Scholar] [CrossRef]
- Yang, J.; He, X.; Chen, H. Crosswell frequency-domain reverse time migration imaging with wavefield decomposition. J. Geophys. Eng. 2023, 20, 1279–1290. [Google Scholar] [CrossRef]
- Gu, B.; Li, Z.; Ma, X.; Liang, G. Multi-component elastic reverse time migration based on the P-and S-wave separated velocity-stress equations. J. Appl. Geophys. 2015, 112, 62–78. [Google Scholar] [CrossRef]
- Xiao, X.; Leaney, W.S. Local vertical seismic profiling (VSP) elastic reverse-time migration and migration resolution: Salt-flank imaging with transmitted P-to-S waves. Geophysics 2010, 75, S35–S49. [Google Scholar] [CrossRef]
- Du, Q.; Guo, C.; Zhao, Q.; Gong, X.; Wang, C.; Li, X.-Y. Vector-based elastic reverse time migration based on scalar imaging condition. Geophysics 2017, 82, S111–S127. [Google Scholar] [CrossRef]
- Wang, W.; McMechan, G.A.; Zhang, Q. Comparison of two algorithms for isotropic elastic P and S vector decomposition. Geophysics 2015, 80, T147–T160. [Google Scholar] [CrossRef]
- Peng, D.; Cheng, F.; She, X.; Zheng, Y.; Tang, Y.; Fan, Z. Three-Dimensional Ultrasonic Reverse-Time Migration Imaging of Submarine Pipeline Nondestructive Testing in Cylindrical Coordinates. J. Mar. Sci. Eng. 2023, 11, 1459. [Google Scholar] [CrossRef]
- Claerbout, J.F. Toward a unified theory of reflector mapping. Geophysics 1971, 36, 467–481. [Google Scholar] [CrossRef]
- Moradpouri, F.; Moradzadeh, A.; Pestana, R.; Ghaedrahmati, R.; Monfared, M.S. An improvement in wavefield extrapolation and imaging condition to suppress reverse time migration artifacts. Geophysics 2017, 82, S403–S409. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Well-1 | Well-2 | Well-3 | Well-4 | Well-5 | Well-6 | Well-7 | Well-8 | Well-9 | Well-10 |
| X | 0.0 | 10.0 | 20.0 | 30.0 | 40.0 | 50.0 | 0.0 | 10.0 | 20.0 | 30.0 |
| Y | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 50.0 | 50.0 | 50.0 | 50.0 |
| No. | Well-11 | Well-12 | Well-13 | Well-14 | Well-15 | Well-16 | Well-17 | Well-18 | Well-19 | Well-20 |
| X | 40.0 | 50.0 | 0.0 | 0.0 | 0.0 | 0.0 | 50.0 | 50.0 | 50.0 | 50.0 |
| Y | 50.0 | 50.0 | 10.0 | 20.0 | 30.0 | 40.0 | 10.0 | 20.0 | 30.0 | 40.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, D.; Cheng, F.; Xu, H.; Zong, Y. An Application of 3D Cross-Well Elastic Reverse Time Migration Imaging Based on the Multi-Wave and Multi-Component Technique in Coastal Engineering Exploration. J. Mar. Sci. Eng. 2024, 12, 522. https://doi.org/10.3390/jmse12030522
Peng D, Cheng F, Xu H, Zong Y. An Application of 3D Cross-Well Elastic Reverse Time Migration Imaging Based on the Multi-Wave and Multi-Component Technique in Coastal Engineering Exploration. Journal of Marine Science and Engineering. 2024; 12(3):522. https://doi.org/10.3390/jmse12030522
Chicago/Turabian StylePeng, Daicheng, Fei Cheng, Hao Xu, and Yuquan Zong. 2024. "An Application of 3D Cross-Well Elastic Reverse Time Migration Imaging Based on the Multi-Wave and Multi-Component Technique in Coastal Engineering Exploration" Journal of Marine Science and Engineering 12, no. 3: 522. https://doi.org/10.3390/jmse12030522