2.1. Environmental Conditions
The forces acting on a marine structure may include sea currents, wind, and waves, which may be time-dependent or uniform. The wave period, wind speed, and currents are related to the wave height. The wind forces are usually uniform and affect the upper part of the platform (i.e., deck) [
29]. The current forces are also usually uniform and affect the underwater parts of the platform (i.e., jacket) [
29,
30]. The long-term variation in a wave climate can be represented by generic distributions or scatter diagrams for the parameters of sea states, such as significant wave height (
) and mean zero-up period (
) for all directions [
30]. According to DNV [
30,
31,
32], the maximum individual wave height in a random sea state can be given by Equation (1).
where
is the mean annual frequency of exceedance of the wave height
and
is the joint probability density function for the
and the
Here,
is the distribution of the largest wave’s height in a storm sea state.
The maximum instantaneous wind speed is assumed to follow the Gumbel distribution [
33], which has the cumulative distribution function given by Equation (2), where
V is the wind velocity and
μ and
σ are its mean and standard deviation, respectively.
where the
K (scale parameter) and
L (location parameter) are characteristic values of the Gumbel distribution function.
K and
L can be calculated using
μ and
σ of the maximum instantaneous
V, which are extracted from the numerical weather data for a specific return period at the target location.
Equation (3) expresses the relationship between the return period (
T, years) and the cumulative distribution function [
33,
34]. Equation (4) is received from Equations (2) and (3).
The current-induced force is obtained by combining the velocity component of the current with the wave-induced drag force. Sea currents impose a uniform flow on the underwater parts of the structure. The velocity of sea currents decreases linearly to the seabed [
32]; here, the maximum current velocities can be estimated from vessel measurements near the site [
35].
2.2. Reliability Analysis
The performance function or limit state function [
36,
37] defines the failure of a structure as the boundary between an acceptable and unacceptable performance. To evaluate the reliability or probability of failure, a specific performance function and the related load and resistance variables are needed. The performance function is generally expressed by Equation (5), where
R is resistance,
L is loading, and
g gives the relationship between
R and
L and the basic random variables
The strength and loads of a structure vary randomly; hence, there is always a probability of failure (
). The
is defined based on FORM and using Equation (6) where
G is less than zero or
R is less than
L. The FORM is used in structural analysis to compute the reliability index (
β) which is defined as the shortest distance from the origin to the failure line. To determine the reliability index, the random variables are converted to dimensionless formats [
38].
It is initially assumed that every variable has a normal distribution and that the probability distribution is determined by its mean and standard deviation. Rackwitz and Fiessler (R_F algorithm) proposed a method to estimate the reliability index as shown in
Figure 2. The R_F algorithm computes the performance
β of a system described by a function of statistically independent random variables [
39].
In
Figure 2,
represents a normally distributed independent random variable.
=
β,
means the value of the basic random variable, and
is the standard deviation of the basic random variable. The mean values of the basic random variables can be used as initial values for the design points. The notations
and
are used, respectively, for the design point in the regular coordinates and in the reduced coordinates.
means the equivalent normal distribution;
is the standard deviation of the equivalent normal distribution. The loop in
Figure 2 is iterated to determine a reliable
β until it converges to a desired value (∆
β ≤ 0.005) [
20,
40]. The reliability index of the
i-th member,
, which is uniquely related to the probability of failure, can be expressed as Equation (7) [
32,
39].
where
the standard cumulative distribution is function and
is the probability of failure of the
i-th member.
As stated earlier, to validate the reliability index obtained from the FORM, the MCS is employed which is based on generating a sequence of random numerical values for the probability distribution of each statistical variable. By defining a counting function
j for the limit state function, integration is performed over the failure function of the structure. This function takes a value of 1 in the failure regions and 0 in the intact regions 1 [
38], as given in Equations (8)–(11).
Based on the definition of the counting function
Based on Equation (9), the probability of failure is equal to the ratio of the number of samples located in the failure area to the total number of simulated random samples (
N), similar to the relationship expressed in Equation (10).
The standard deviation of failure probability is determined using Equation (11).
It is worth noting that the accumulation of damage reduces the remaining strength of the structural members or its overall capacity which can increase the failure risk. The cumulative PoF over
t years can be expressed using Equation (12) [
20].
where
is the annual PoF in year
k. Although maximum annual storms can be considered independent, the accumulation of damage in the structure and its deterioration are not so; hence, this assumption does not fully apply, and the approximation of the
in Equation (12) is conservative. If
Z is the number of mutual damage modes considered in the dynamic analysis, then each damage mode can be defined by the level of corrosion damage in a set of elements. Hence, the
in year
t can be expressed via Equation (13) [
20].
where
is the annual conditional failure probability concerning damage state
i,
is the annual conditional failure probability concerning the absence of damage, and
is the probability of occurrence of damage state
i in year
t. In Equation (14),
refers to the probability of no damage in year
t.
Finally, the annual reliability index (
) for design lifetime is calculated using Equation (15) [
20].
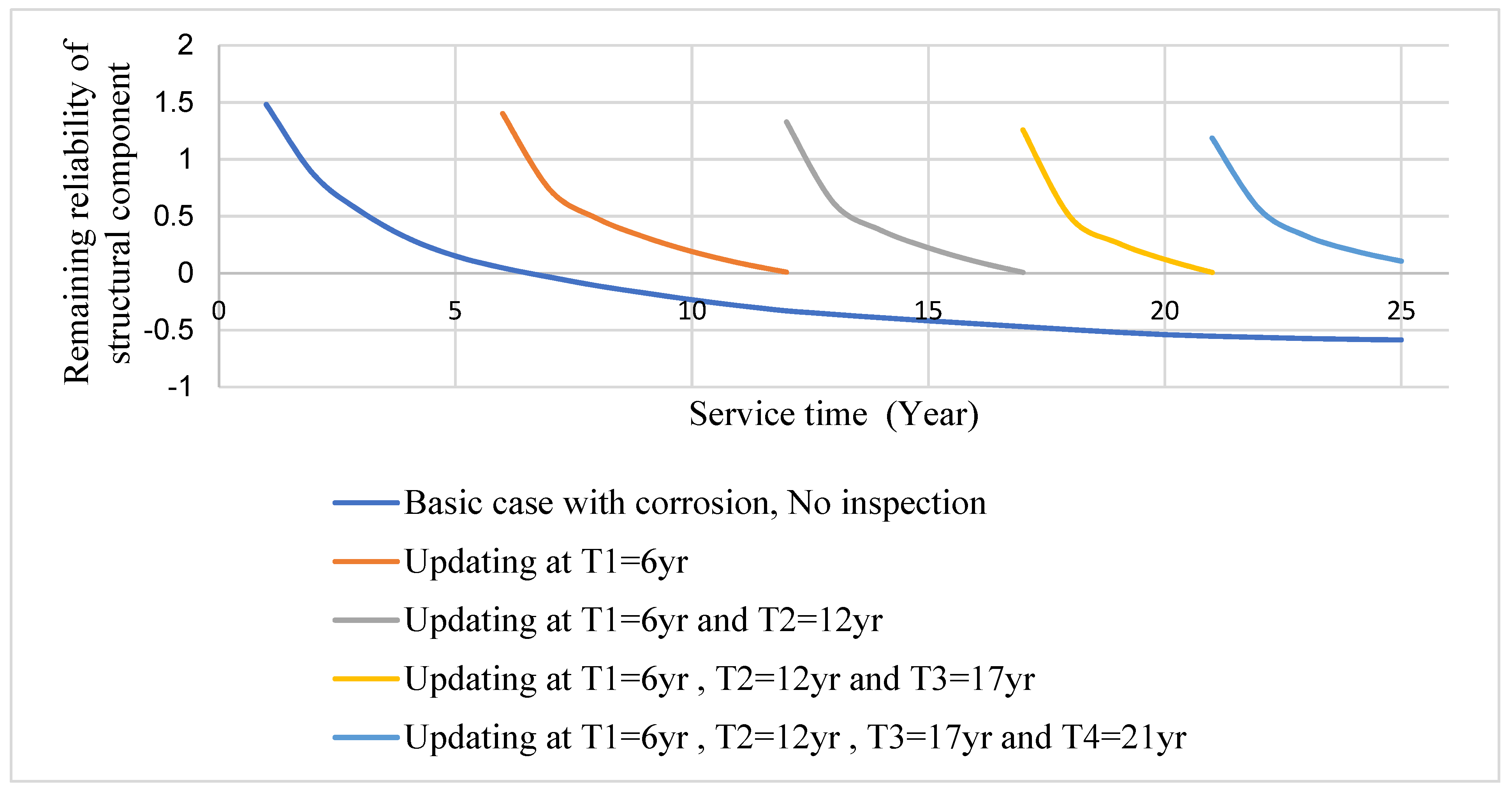
Target reliability is the minimum level of reliability that the offshore should maintain during its service time. It depends on the consequences and types of failure events that may occur. Target reliability can be calibrated using well-established cases with adequate safety. If not, previous studies based on the consequence and failure class can be used. The remaining reliability of structural components is the difference between the annual reliability and the annual target reliability [
40]. The annual reliability of the
i-th element (
Rt) in service time
t is the reliability index obtained by subtracting the PoF in two consecutive years. The minimum annual target reliability of the
i-th element (
RT) is the reliability index from the annual PoF. The remaining reliability of the
i-th element (
Rrem) is given by Equation (16).
when
approaches zero,
increases. In this situation, any action, as well as decreasing loads on the structure or increasing the strength of the structure, can be used to improve the
.
Reliability updating is a method to improve the accuracy of the reliability assessment of structures by incorporating additional information from inspections, measurements, or tests. Reliability updating can help optimize the maintenance of offshore structures by reducing uncertainties and identifying critical components. Different approaches to reliability updating exist. The choice of approach depends on the type and amount of additional information available and the structural details considered. The PoF of a specific element can be updated using additional information such as response measurement and damage detection. These can be modeled as events or variables [
41]. The updated PoF (
) can be calculated using the conditional probability in Equation (17).
where
E is the possible result from the inspection which is discussed in the following section. It should be noted that Equation (17) is a general updating formula that can be applied to the inspected elements.
G is the safety margin (the boundary limit function). Otherwise, the inspection information from inspected elements is applied to the uninspected elements updating. The information can also be used to update the basic variables. This kind of updating PoF can be calculated by replacing the updated random variables in the new safety margin [
41].
2.4. Reliability Index of Tubular Member’s
The corroded elements are evaluated as undamaged elements with reduced thickness. The failure probability of the structure is calculated based on the failure criterion [
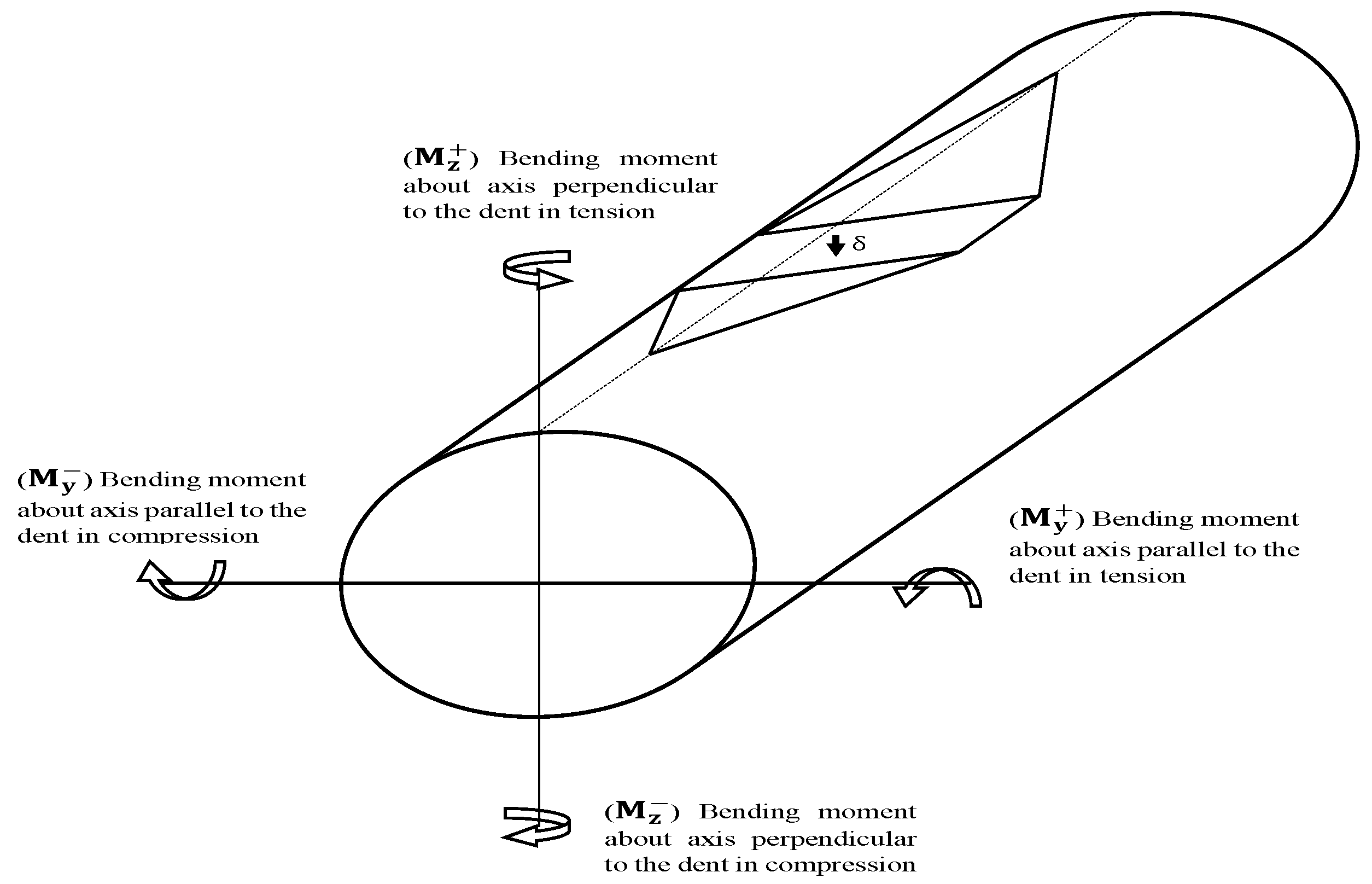
46]. The structural element is a failure index under the combined effect of axial force and bending moment in two directions. The buckling of structural members is checked for both compression and tension states using two performance functions. The dented tubular elements are assessed for axial tension and compression loads, as well as combined axial and bending loads. The limit state function for the dented tubular members under combined axial tension and bending is given by Equation (20). The limit state function for the dented tubular members under combined axial compression and bending is given by Equation (21) [
46,
47].
where
,
, and
MRd are the axial force tension capacity of the dented section, the axial force compression capacity of the dented section, the axial force on the dented section, the bending capacity of the dented section, and the design bending capacity of undamaged sections, respectively.
, and
are the design bending moment about an axis parallel to the dent (
y-axis) and the bending moment about an axis perpendicular to the dent (
z-axis), respectively (see
Figure 3).
and
D, are the equivalent dent depth and the tube diameter, respectively.
Cm is the co-existence coefficient of the maximum moment with secondary moments,
NE is the Euler loading moments, and
is Euler buckling strength of the dented section, for buckling in line with the dent.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



