1. Introduction
In recent years, there have been numerous maritime emergencies where rescue operations failed due to delays of rescue vessels in reaching the locations of incidents promptly, which can be attributed to the distant positioning of standby points for rescue vessels. How to reach the maritime scene for search and rescue (SAR) as soon as possible has been a hot research topic for experts and scholars. The scientific allocation and deployment of rescue vessels, as well as optimizing the selection of standby points, are key to solving this problem. Rational allocation of maritime rescue forces can improve the efficiency and success rate of rescue operations. The scientific selection of emergency standby points is particularly important as it enhances the capability of the maritime emergency response, reduces rescue distances, and minimizes rescue time. Currently, research on emergency location models mainly focuses on the selection of emergency standby points for land-based emergency operations. Studies on the selection of maritime rescue vessel locations are still primarily in the theoretical research stage, lacking quantitative vessel location models.
The research on emergency resource location problems originated with Hakimi’s p-median problem proposed in 1964 [
1,
2]. This problem emphasizes the collective welfare of the final outcome, with the main objective being to select the locations of
p facilities to achieve optimal overall or average performance [
3]. Hakimi then proposed the p-center problem, which optimizes the chosen locations of p facilities for the worst-case scenario [
4]. This approach has been widely applied in hospitals, the military, and service industries. In 1983, Shier and Dearing introduced the absolute center problem for the location of a single resource supply point [
5]. The core of this type of location optimization problem is to find the absolute center point in the network, which is the point with the shortest distance to all other nodes. Ogryczak proposed a bi-objective model for the emergency service facility location problem [
6]. This method simultaneously considers the median objective function and the center objective function, and can transform it into a single-objective model with parameter λ as the center point. Wang et al. established a mathematical model for optimizing the location of rescue centers [
7], taking into account the probability of disaster occurrence, the spread function of the disaster, and the rescue function. Alinaghian et al. constructed a model for temporary rescue center location and a dynamic helicopter routing model for distributing essential supplies [
8]. Compared to traditional static routing, dynamic routing resulted in less total allocation time. These algorithms are effective in solving the problems of finding the absolute centers and determining a single supply point. However, it is not suitable for solving problems involving multiple supply points, such as the deployment of standby points for search and rescue vessels.
Zero–one programming is applicable for solving problems involving multiple integer variables and where the variables have logical relationships of being either present or absent. It is also effective for optimizing the selection of multiple supply points. Chen et al. identified three key objectives in the multi-objective decision-making process for emergency system location selection [
9]. Firstly, the distance or weighted distance between emergency rescue facility service points and demand points should be minimized. Secondly, emergency rescue facilities should have excess coverage, and the total weight value of the excess coverage area should be maximized. Lastly, the total weighted distance between emergency rescue facility service points and demand points should be minimized. Lai et al. constructed an optimization model for dual-objective emergency logistics center location, considering the emergency material demand at the disaster site, transportation costs, and time as discrete sets, and obtained optimal location solutions [
10]. Moreno et al. explored the problem of heterogeneous fleets for road repair and rescue path planning, which had been overlooked in existing research [
11]. Wu et al. proposed the concept of rescue zones for tourist attractions [
12]. For each waypoint rescue zone within a tourist attraction, the effectiveness was calculated based on linear rewards. The rescue status and rescue areas of the tourist attraction rescue zones were determined based on the rewards of all rescue zones. Taking into account the reliability of the facility system, Nahavandi established an emergency logistics location-routing model to maximize the reliability of the facility system and ensure that the emergency logistics system can respond to demands even when certain facilities are unable to operate [
13]. In the scenario where multiple suppliers provide goods, Khanchehzarrin considered the risk of the goods and developed a multi-objective bi-level model for the emergency logistics location-routing problem [
14]. The study confirmed that when goods with higher risk and priority are provided, the efficiency of emergency logistics will be improved. Eliiyi established an emergency logistics location-routing model with the objective of minimizing response time and maximizing coverage [
15].
There are several other models and algorithms designed to address resource allocation and site selection problems. Beiki developed a multi-objective mixed integer model for the location-path problem of medical relief during a disaster [
16], with the objectives of minimizing response time, minimizing operational costs, and maximizing the reliability of the transportation network. The variable neighborhood search heuristic algorithm has been utilized to solve the central problem model for emergency warehouse location, taking into account constraints such as economic conditions, traffic conditions, and population distribution [
17]. The parameters associated with the dynamic facility location vary over time. The tabu search algorithm is used to solve the site selection and path decision problems for disaster assessment [
18]. The effectiveness of this method has been validated with earthquake cases. The ant colony algorithm is used to optimize the disaster vehicle delivery path, considering vehicle allocation and dynamic demand, including vehicle capacity, time to reach the distribution center, and time to reach the disaster area [
19]. Scholars have also studied the problem of uncertain post-disaster emergency logistics routing, which can be handled using stochastic optimization and robust optimization methods. Sun et al. proposed a new emergency logistics location-path optimization model, which addresses uncertain demands using relative robust optimization and estimates equipment failure risks using genetic algorithms [
20]. For post-disaster emergency blood supply, a multi-objective robust optimization model is used to solve the location selection of field hospitals and blood transportation path planning problems [
21]. Search algorithms and ant colony algorithms are well suited for scenarios where there are relationships between variables and where search elements can be inputted into a search engine. However, they may not be the best choice for problems like the deployment of maritime rescue vessels involving multiple variables that are independent of each other. Robust algorithms are a less efficient choice compared with 0–1 programming.
In recent years, deep learning models [
22] and geographic information systems (GISs) have also been used to predict the geographical coordinates of past merchant ships and alternative islands [
23,
24,
25]. By employing the K-means clustering algorithm, they determined the positions of dynamic work points for establishing SAR bases at sea. A multi-objective plant growth simulation algorithm was designed to obtain optimal solutions that comprehensively consider the positions of dynamic SAR work points, the configurations of SAR vessels, and the locations of SAR bases. Wang et al. took China’s Nansha Islands and reefs as an example and established a bi-objective optimization model [
26]. By applying an improved non-dominated sorting genetic algorithm II (NSGA-II) with adaptive-scaling crowding distance and adaptive elitism preservation strategy, they obtained ship rescue base location solutions.
The Beihai area, with high maritime traffic density and complex sea conditions, faces severe maritime safety challenges. The scientific allocation and deployment of rescue vessels, as well as the selection of standby points, are crucial for improving search and rescue success rates and reducing casualties. This is the problem that this study aims to address.
2. Data
The deployment of rescue vessels in the Beihai area is managed by the Beihai Rescue Bureau. Currently, there is a total of 25 dynamic standby points of rescue vessels established in the jurisdictional waters [
27]. The specific distribution of these standby points is shown in
Table 1.
The Beihai Rescue Bureau currently has a total of 12 professional rescue vessels [
28]. In coastal waters, shipwreck incidents are extremely uncommon. The more frequent emergency situations involve the rescue of injured crew members from fishing boats. Therefore, these rescue vessels are classified into three categories, large, medium, and small, based on their speed and endurance for the purpose of personnel rescue, as shown in
Table 2 and
Table 3.
The typical response time for professional rescue vessels from receiving an alarm to departure, as managed by the Beihai Rescue Bureau, is usually 30 min (40 min during winter). However, due to their smaller size, Beihai Rescue 201 and 203 have a response time of 20 min (30 min during winter).
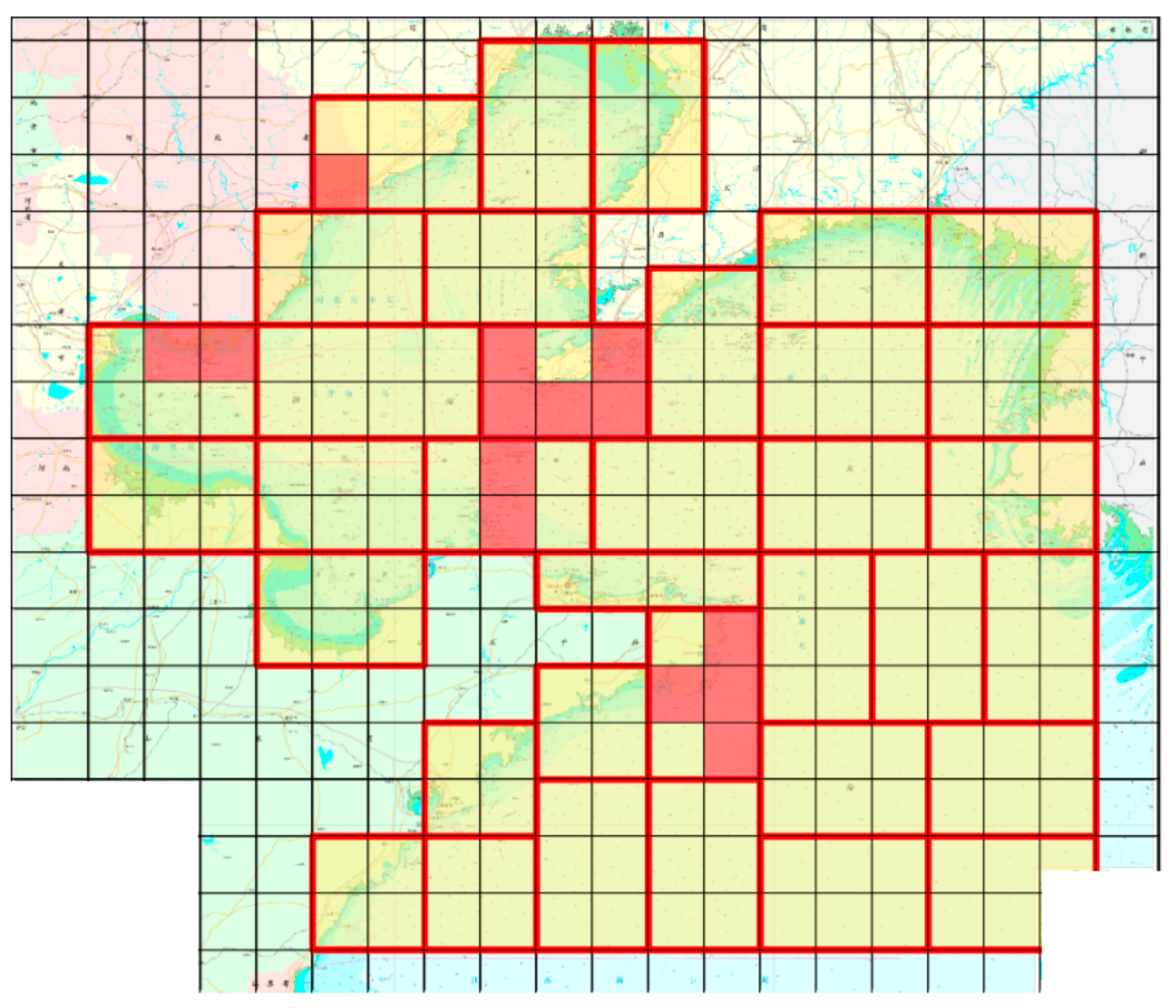
The North Sea area has been gridified, and the locations of incidents and existing rescue forces in the North Sea are marked on the nautical chart with icons of triangle and ship, respectively, as shown in
Figure 1. According to the data provided by the Beihai Rescue Bureau, high-risk areas in the North Sea are depicted in
Figure 2, with red grid areas representing high-risk zones.
It can be found from
Figure 1 that the incidents cover the entire North Sea area, mainly concentrated in four areas: Tianjin, Qinhuangdao, the Lüshun-to-Penglai line, and Rongcheng. The existing rescue forces of the Beihai Rescue Bureau are mainly deployed in these four areas.
The large rescue vessels have a cruising speed of 20 knots and a range of 10,000 nautical miles. The medium-sized rescue vessels, divided into two types, have a cruising speed of 17.3 knots and ranges of 5000 nautical miles and 14,000 nautical miles, respectively. The small rescue vessels have a cruising speed of 32.5 knots and a range of 500 nautical miles. Considering that it takes some time for the vessels to reach the rescue location and return, the coverage radius should not exceed one-third of the range. Here, it should be ensured that the vessels can arrive within 6 h, which includes the response time (from receiving the alert to departure, considering the longest response time in winter). The calculated coverage radii are shown in
Table 4.
3. The Construction of the Deployment Model
Taking into account the advantages and disadvantages of the existing land site selection models, the ratio of the difference between the coverage radius of the rescue vessel and the distance to the incident location divided by the coverage radius of the rescue vessel is used as a measure of coverage quality. This approach ensures the maximum coverage quality for general areas while also maximizing coverage quality for high-risk areas. Based on the principles of “multi-source services” and “multi-layered coverage”, the model emphasizes different service qualities of rescue forces at different levels and multiple quantity coverage at the same location. A multi-level and multi-layered coverage site selection model is proposed to improve the efficiency of emergency rescue.
3.1. Zero–One Construction of the Integer Programming Coverage Model
The location problem in this paper will be solved by using the 0–1 integer programming model. Considering different levels of rescue forces participating in accident response, the coverage situation is determined based on the distance between the emergency incident location and the standby points of the rescue forces. Each incident location can be served by different rescue standby points, providing varying levels of coverage. The expression is shown in Equation (1).
In this case, Dpu represents the maximum effective coverage radius of standby point P, and the coverage quality Cijp is defined based on the linear distance (Dijp) between incident point I and the rescue standby point (Pj). If Dijp < Dpu, it indicates that incident point I is within the coverage capability of the multi-level rescue force. Cijp is a partial-coverage degree function that decreases linearly with the increase in the distance between the rescue standby point and the incident point. Cijp = 0 represents that the incident point is not covered by the standby point, and 0 < Cijp < 1 represents that the incident point is within the effective coverage capability. When selecting the location for maritime professional rescue vessels, the first priority is to ensure that the vessels can provide maximum coverage for the jurisdictional waters.
For accident point
i,
i ∈
I (
i belongs to the accident point set
I, taking
i = 1, 2, 3, …, 143, a total of 143 accident points), introducing the decision variable
gi, as shown in Formulas (2) and (3):
that is
Then, the following set coverage problem can be established to ensure that the selected standby points can cover the accident water area in the jurisdiction to the maximum extent, with Formula (4):
zijp,
xjp,
ujp,
dp, and
yijp are 0–1 decision variables in the maritime danger scenario. When the rescue resource reserve point (
Pj) is selected,
xjp = 1; otherwise, it is 0. When accident point
i is covered by rescue force
Pj,
ujp = 1; otherwise, it is 0. If rescue force
Pj participates in the rescue, then
dp = 1; otherwise, it is 0. When rescue force reserve point
Pj has the ability to serve accident point
i,
yijp = 1 and
zijp = 1; otherwise, they are 0. In the high-risk water area (
m) within the jurisdiction (belonging to the accident point set,
I), the rescue forces at all standby points should be able to cover the high-risk water area (
m) to the maximum extent possible;
Dmjp is the distance between the high-risk accident point (
m) and the rescue reserve point,
Pj.
Dmjp <
Dpu indicates that the high-risk accident point (
m) is within the coverage capacity of multi-level rescue forces;
Cmjp = 0 indicates that the accident point (
m) is not covered by the reserve point, and 0 <
Cmjp < 1 indicates that the accident point (
m) is within the effective coverage capacity range. Formulas (5) and (6) introduce variable
gm.
The expression for the coverage quality (
Cmjp) of high-risk water areas is shown in Formulas (7) and (8):
The quality model of coverage in the jurisdiction is as follows:
Among them, the objective function (8) represents high-risk water areas, and the rescue force is the most effective coverage. The objective function (9) represents the most effective coverage of rescue force Pj in multiple rescue modes with cross-regional maritime hazard response levels. The constraint condition (10) indicates the number (Np) of reserve points (Pj) participating in the response. In constraint (11), the premise for the accident site to receive rescue resource services is that the rescue reserve point is selected. The constraint conditions (12) and (13), respectively, indicate that only when the rescue force (Pj) is determined to participate in the rescue can Pj be selected to serve the accident point. The constraint condition (14) guarantees that zijp, xjp, ujp, dp, and yijp are 0–1 integer decision variables.
3.2. Algorithm Design of 0–1 Integer Programming Coverage Model
There are multiple variables in this model, including a total of 25 standby points and three types of rescue vessels. After determining the standby points, the rescue vessels need to be allocated. It is evident that such a large number of variables cannot be solved directly. In the model, there is only one small rescue vessel with a speed of 32.5 knots, while the speed difference between the medium-sized rescue vessel (17.3 knots) and the large-sized rescue vessel (20 knots) is minimal. Therefore, we can initially assume that all rescue vessels are medium-sized rescue vessels with a speed of 17.3 knots, select the locations, and then adjust the types of vessels accordingly.
The most prioritized condition in the model is to maximize the coverage of the accident area and strive to eliminate blind spots. Therefore, the first step is to solve Equation (4) in order to achieve this objective.
Next, it is crucial to ensure maximum coverage of high-risk water areas and achieve the highest coverage quality. This involves solving Equations (6), (8), and (9) in order to obtain the optimal results.
In this paper, the optimal solution is obtained by using the
intlinprog function in MATLAB, and the function prototype is show in Equation (15):
where
A and
b are coefficient matrices,
Aeq and
beq are the matrix of coefficients and the column vector of the right-hand side values for those constraints,
lb and
ub are the lower and upper bounds of the variables, the return value
x is the solution vector that minimizes or maximizes the objective function, and
fval is the value of the objective function at the solution (
x). Among them,
exitflag is an integer indicating the termination condition of the algorithm, and
intcon is a vector specifying the indices of the variables.
4. Case Analysis of Deployment in the North Sea Area (Results)
4.1. Existing Standby Positions of Rescue Vessels in the North Sea Area
The Beihai Rescue Bureau of China selected 15 locations out of the 25 candidate standby positions in Beihai based on actual operational conditions and the status of rescue vessels. The actual positions and their level of importance are listed in
Table 3.
The Beihai Rescue Bureau of China plans to select eight standby points within its jurisdictional waters. Therefore, this article will utilize the 0–1 integer programming model constructed in the previous section to select eight points from the twenty-five candidate standby locations, and assign the corresponding rescue vessels to these eight points.
4.2. Numerical Simulation Analysis of Professional Rescue Ships in the North Sea Area
MAPGIS was used to convert the geographic coordinates of the risk points under the jurisdiction of the Beihai Rescue Bureau of China to the Cartesian coordinates, as shown in
Figure 3.
From
Figure 3, it can be found that the risk points almost cover every unit position in the area under the jurisdiction of the Beihai Rescue Bureau. The blank area in
Figure 3 is the land, involving the Bohai Sea Coast, Liaodong Peninsula, and Shandong Peninsula.
The geographic coordinates of high-risk points were also converted into the geodetic coordinates by using MAPGIS. The points with high risk are marked with red circles in
Figure 4.
The geographic coordinates of 25 standby points for professional rescue vessels were converted into Cartesian coordinates. These standby points are marked in the map with stars, as shown in
Figure 5,
Figure 6,
Figure 7 and
Figure 8.
The first thing to ensure is that the standby point of the rescue vessels can cover all the waters within the jurisdiction. To satisfy this requirement, there must be at least one standby point in each of the five regions: Qinhuangdao, Tianjin, Rongcheng, Qingdao, and Dandong. The five standby points are shown in
Table 5.
The remaining three standby points will be selected from the remaining twenty-one candidate points. The main consideration for site selection is based on the maximum coverage of jurisdictional areas and the maximum coverage of the high-risk area models.
According to the previous assumption that all rescue vessels are medium rescue vessels with a speed of 17.3 knots, the optimal solutions for Formulas (7), (9) and (10) were obtained using the intlinprog function in MATLAB. Eight optimal points were selected, as shown in
Table 6.
According to the data from the Beihai Rescue Bureau [
28], a total of twelve vessels are used for maritime search and rescue and material supply, including six large rescue ships, four medium-sized rescue ships, and two small rescue ships. Based on this ratio, four large rescue ships, three medium rescue ships, and two small rescue ship are selected and allocated to the eight standby points. Then, using the intlinprog function in MATLAB, the rescue force allocation is re-calculated based on Formulas (6), (8), and (9). The results are shown in
Table 7. The coverage range of large rescue vessels is shown in
Figure 5.
From
Figure 5, it can be seen that large rescue vessels can cover almost all of the accident points within the water area, and they can arrive at the scene within 6 h (including alarm response time) for search and rescue operations.
Medium rescue ships primarily cover the Bohai Sea area and high-risk accident-prone areas. Small rescue ships are highly flexible, fast, and capable of reaching various water areas in their jurisdiction within 6 h, making them suitable as mobile standby points. However, in the event of severe weather conditions, small rescue ships are unable to sail due to their poor wind resistance.
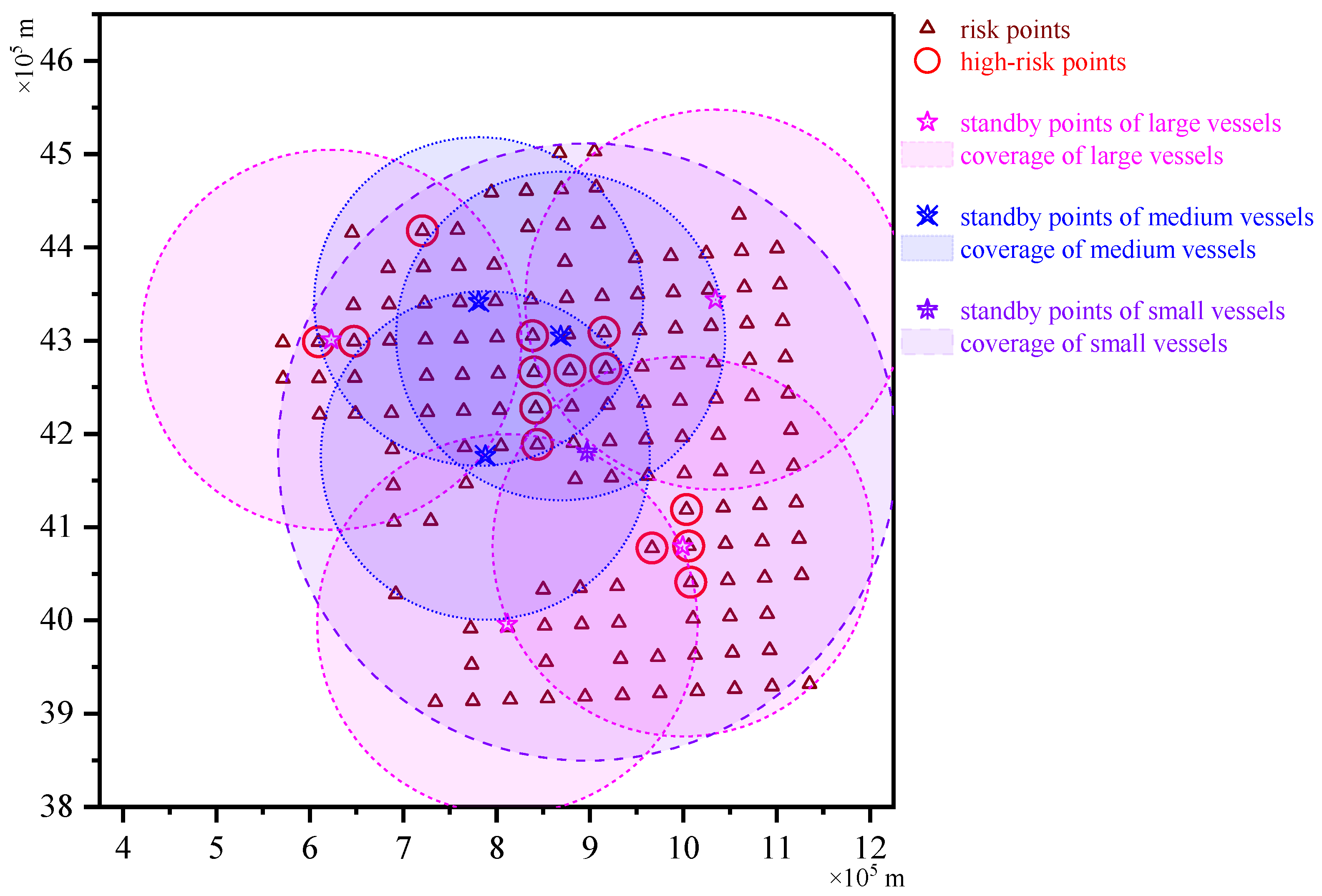
According to the above rules of allocation, it can be ensured that rescue vessels will arrive at all accident water areas in their jurisdiction within 6 h (including the time from alarm to response). In high-risk water areas, different levels of rescue vessels can be deployed at different standby points to achieve multi-level and multiple coverage. The coverage is illustrated in
Figure 7.
Based on this, the eight standby points divide the Beihai area into eight blocks: Bohai Strait, Qinhuangdao, Dandong, Dalian, Yantai, Tianjin, Rongcheng, and Qingdao. The rescue vessels can cover the entire Beihai area and achieve the fastest and most effective rescue for maritime emergencies. High-risk water areas can be covered by multiple standby points and vessel types. For emergencies near Tianjin Port, Beihai standby point No. 2 (Caofeidian) is primarily responsible for rescue operations, while the Ocean Island standby point is primarily responsible for emergencies near Dandong. For emergencies in the Yellow Sea, the Qingdao Port Anchorage and Rongcheng standby points are the main rescue points. Among them, Ocean Island, North Sea No. 2 (Caofeidian), North Sea No. 4, and Qingdao Port Anchorage are equipped with large rescue vessels, while Longkou, North Sea No. 3, and the base dock are equipped with medium rescue vessels. Although large and medium rescue vessels are lower, they have stronger endurance and wind resistance levels, allowing them to conduct maritime search and rescue operations for human lives, except in extremely adverse weather conditions. Small rescue vessels have poor wind resistance and cannot operate in severe weather conditions. Therefore, they are stationed at Yantai Port Anchorage as a mobile standby point, utilizing their advantages of covering all accident areas and high speed to achieve multi-level and multiple coverage.
4.3. Verification of the Superiority of the Deployment Plan
The Beihai Rescue Bureau has deployed twenty-five standby points, which are classified as seven important standby points, four temporary standby points, and one mobile standby point (small boats). Here, we take Beihai Rescue Bureau’s deployment with seven important standby points and one mobile standby point, and make a comparison with the results obtained with the model in this paper. Rescue vessels with power above 8000 kW are classified as large rescue vessels, those above 6000 kW as medium rescue vessels, and high-speed rescue vessels as small rescue vessels. After coordinate conversion using MAPGIS, the eight standby points are listed in
Table 8. The corresponding coverage areas are shown in
Figure 8 on the Cartesian coordinate system.
The two deployment plans can be compared by solving models of the maximum coverage quality of the jurisdictional water areas and the maximum coverage quality in high-risk areas. The maximum coverage quality of the jurisdictional water areas in this deployment plan is 193.17, and the quality coverage of high-risk water areas is 25.53. The counterparts of Beihai Rescue Bureau’s current plan are 169.88 and 23.15. Both results of this plan are higher. This means that the comprehensive distance between rescue points obtained in this work is smaller than that of the existing plan.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}