
Behavior Analysis of a Bucket Foundation with an Offshore Wind Turbine during the In-Water Sinking Process
 , and
, and
Abstract
:1. Introduction
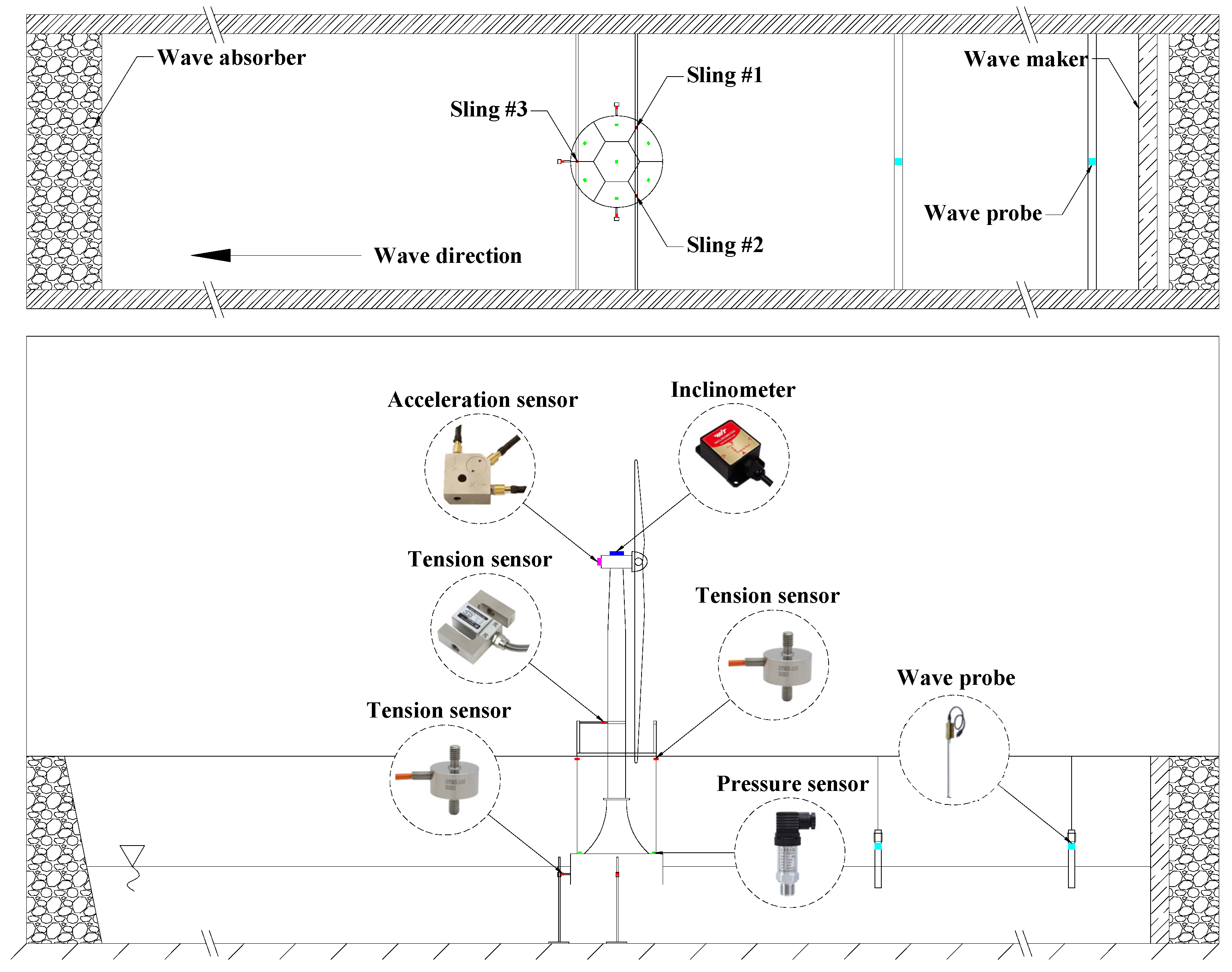
2. Experimental Techniques
2.1. Similarity Theory
2.2. Model Description
2.3. Test Conditions
3. Experimental Results and Discussion
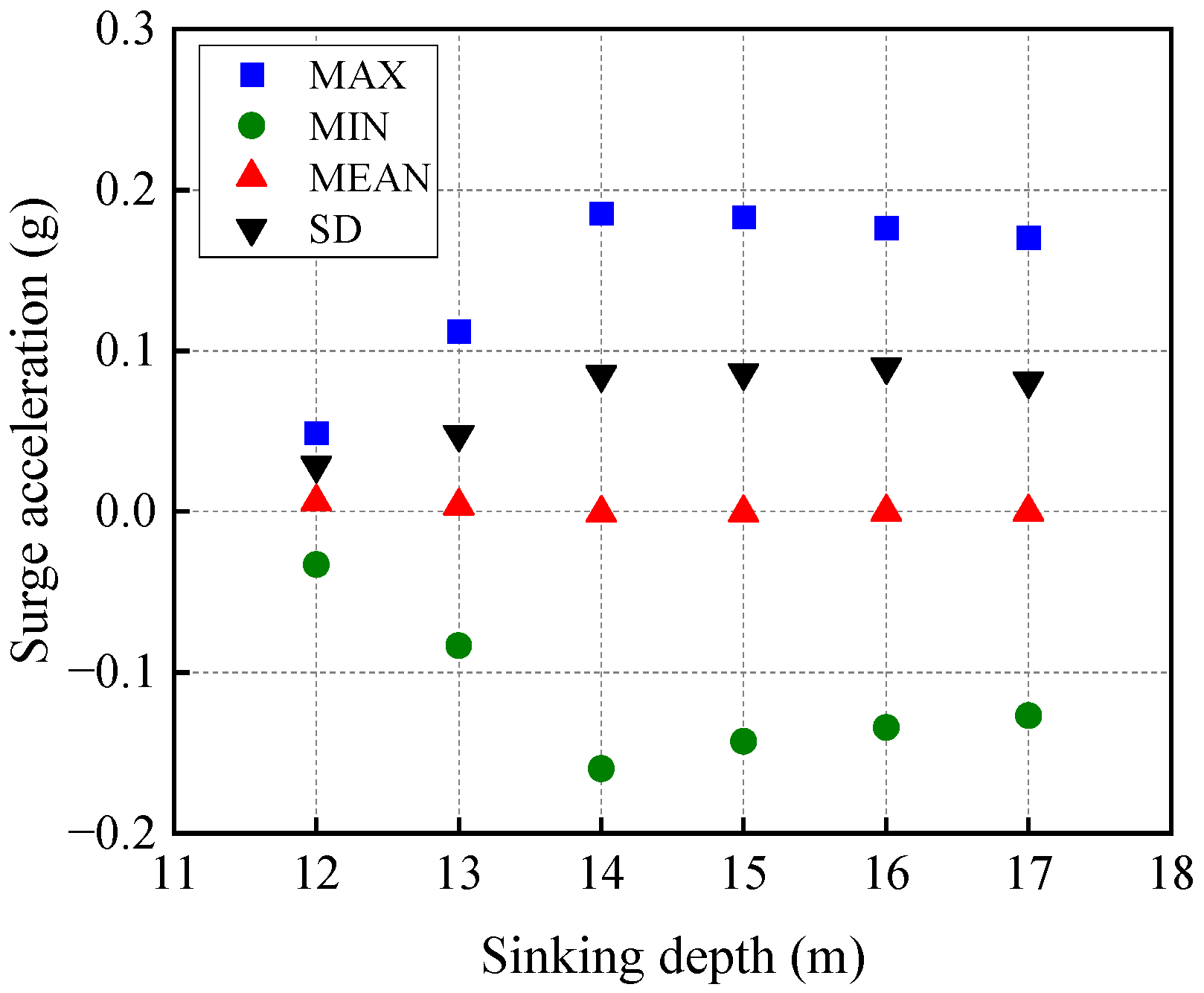
3.1. Motion Responses
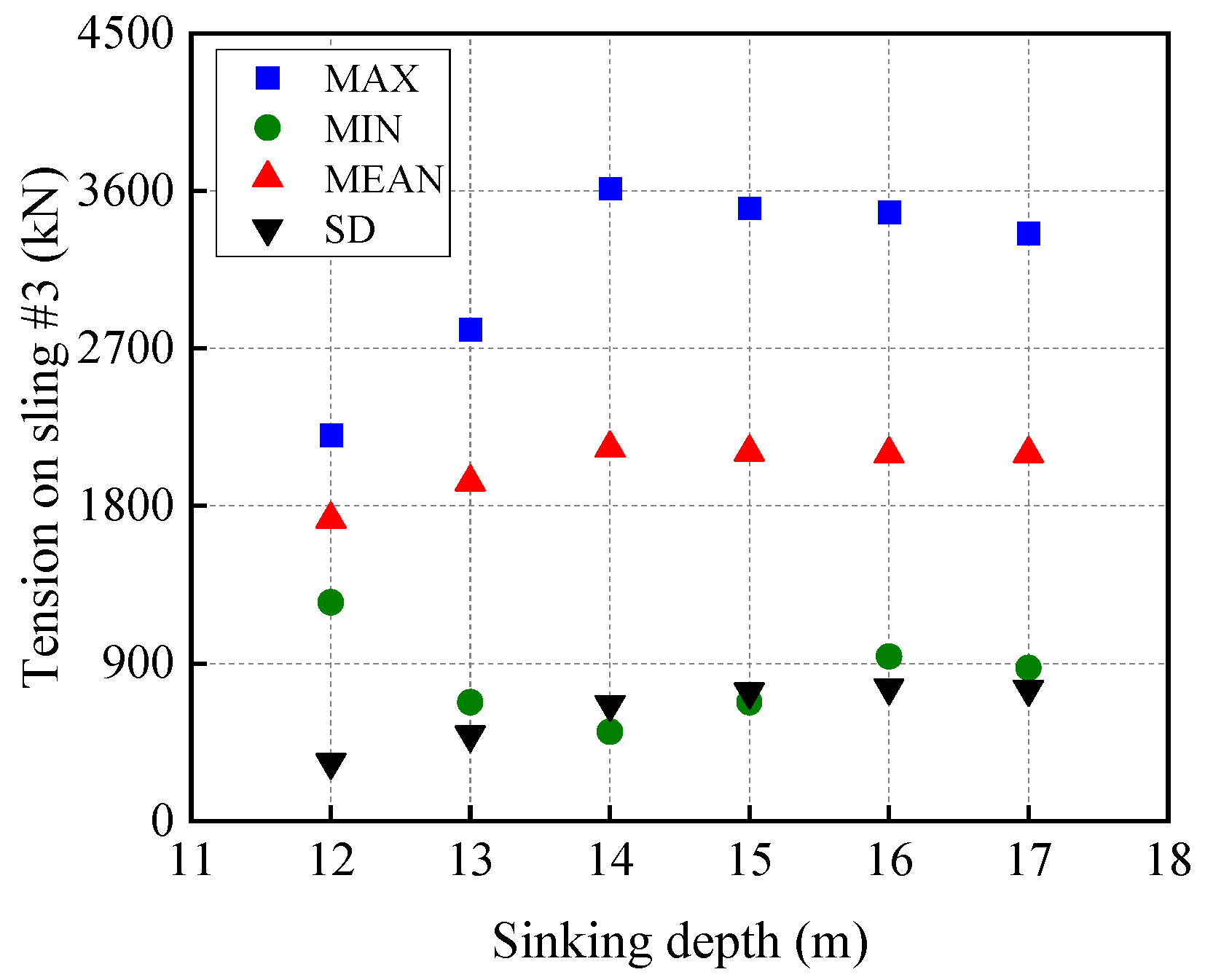
3.2. Tension on Sling
4. Numerical Analysis
4.1. Modeling
4.2. Validation of Numerical Results
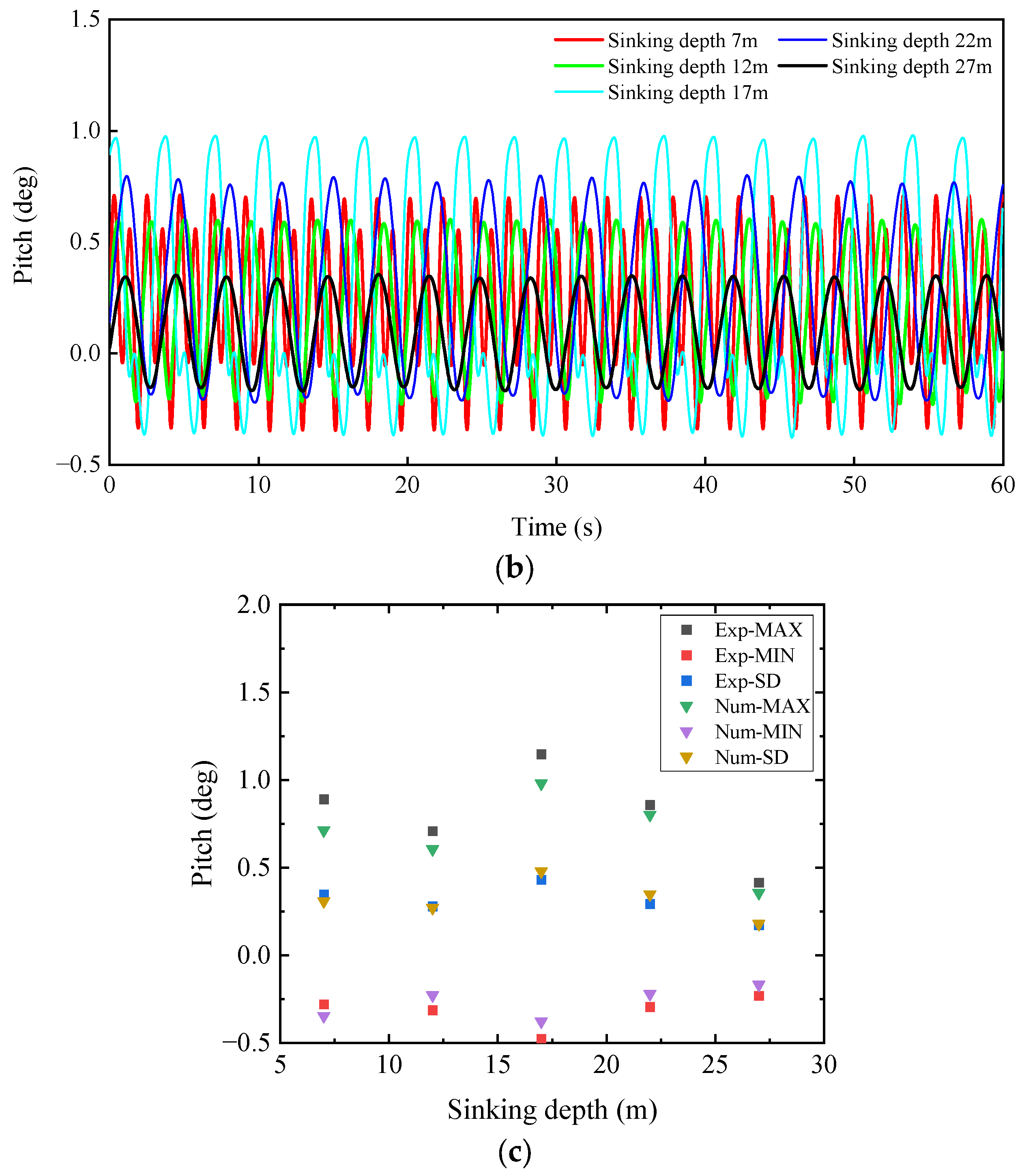
4.2.1. Pitch
4.2.2. Surge Acceleration
4.2.3. Tension on Slings
4.3. Determination of Dangerous Conditions
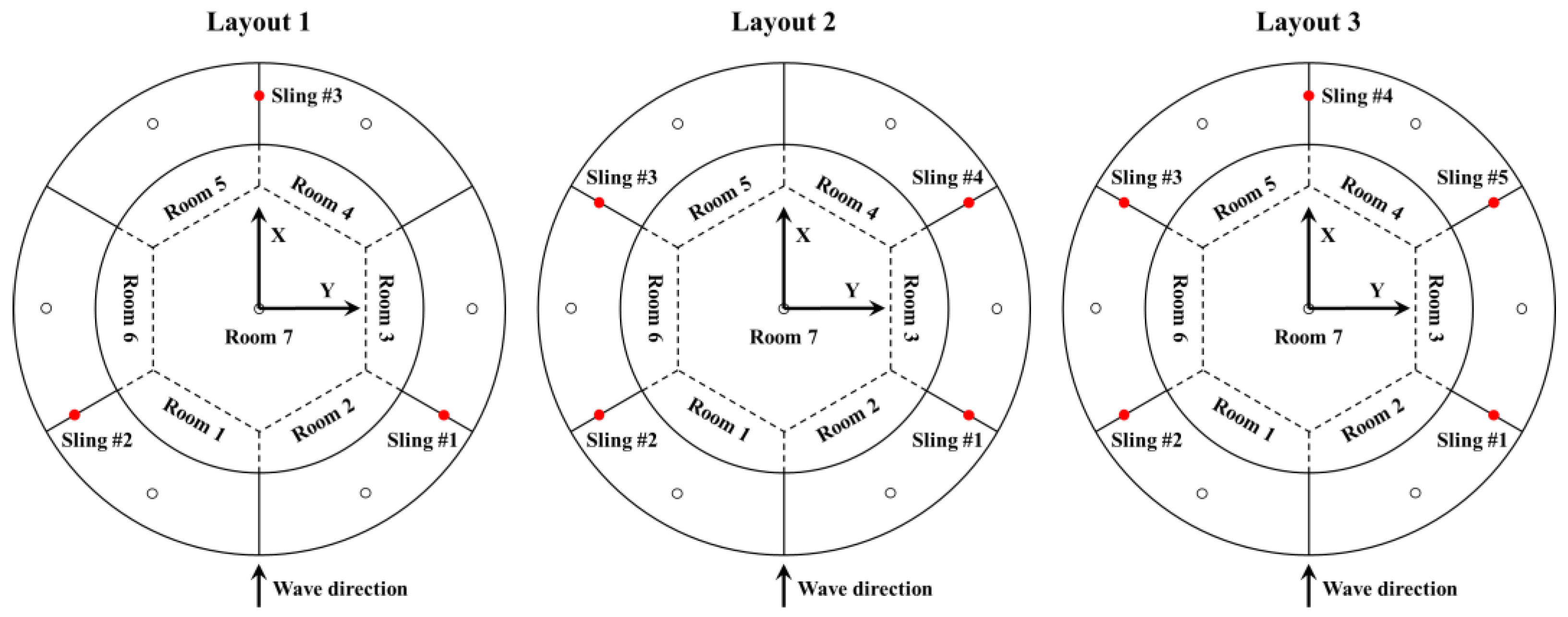
4.4. Optimization of Sling Layout
5. Control Strategies for the In-Water Sinking Process of the OWT–BF
6. Conclusions
- (1)
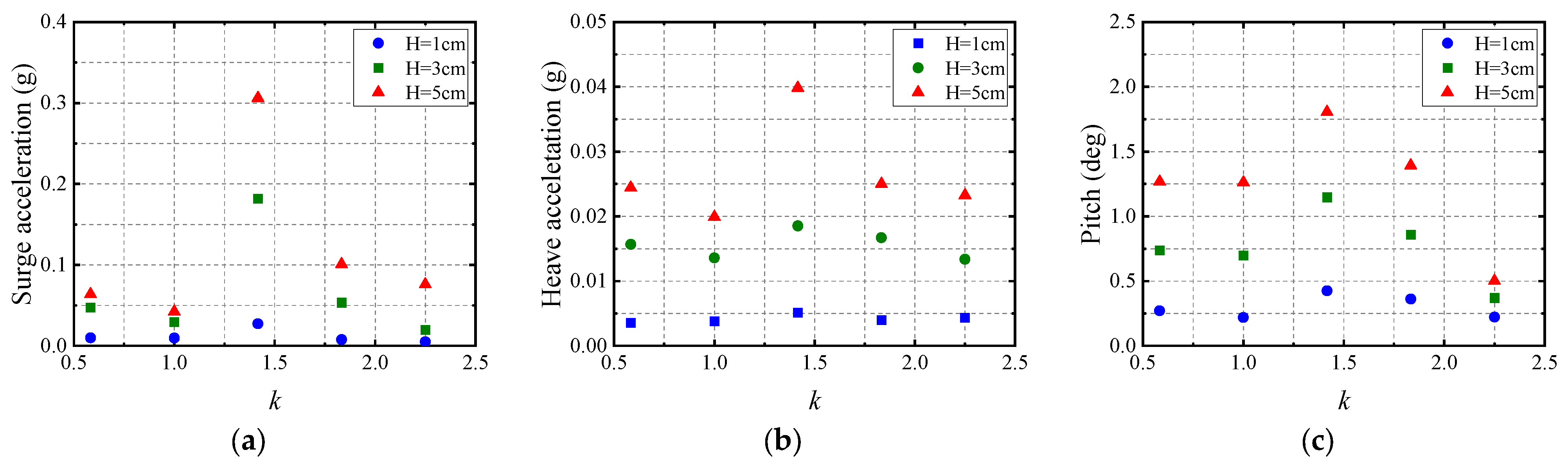
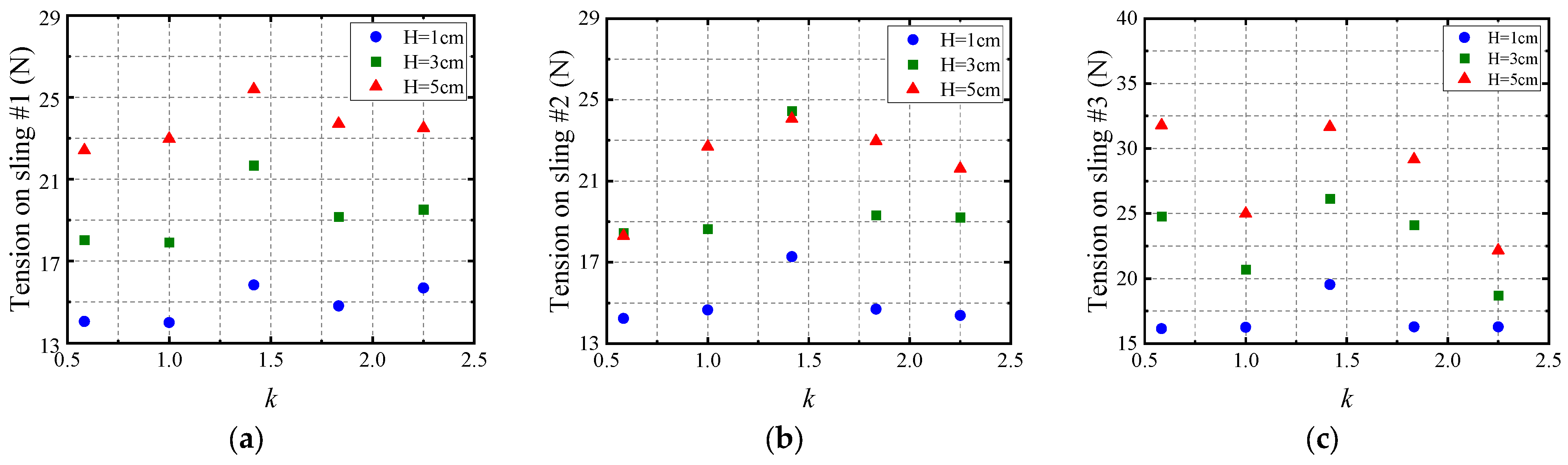
- During the in-water sinking process, the motion of the OWT–BF and the sling tensions increase with an increase in the wave height. Under identical conditions, the surge acceleration is obviously larger than the heave acceleration, establishing the surge acceleration as the predominant controlling factor of the in-water sinking process of the OWT–BF.
- (2)
- A relative sinking depth of 1.2 is the most dangerous condition in the whole sinking process, as the motion of the OWT–BF and the sling tensions reach their maximums at this depth. At a wave height of 2.5 m, the surge acceleration reaches 0.31 g, surpassing the allowable horizontal acceleration of 0.25 g. Consequently, requisite measures should be implemented to mitigate the motion of the OWT–BF at this stage, and it is advisable to conduct the in-water sinking operation of the OWT–BF when the wave height is below 1.5 m.
- (3)
- As the relative sinking depth exceeds 1.2, the motion of the OWT–BF and the sling tensions are significantly reduced by wave influences as the sinking depth increases, thereby enhancing the safety of the sinking operation.
- (4)
- The change rules of the OWT–BF motion and sling tensions with the sinking depth remain relatively consistent during the in-water sinking process. The sinking strategy controlled by the sling and gas pressure proves effective in controlling the motion of the OWT–BF. Therefore, the slings serve as crucial auxiliary equipment for accomplishing the installation of an air-floating structure.
- (5)
- The layout of slings exerts a more significant influence on the motion of the OWT–BF than the quantity of slings.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Global Wind Energy Council (GWEC). Global Wind Report 2023; GWEC: Brussels, Belgium, 2023. [Google Scholar]
- Li, Y.; Huang, X.; Tee, K.F.; Li, Q.S.; Wu, X.P. Comparative study of onshore and offshore wind characteristics and wind energy potentials: A case study for southeast coastal region of China. Sustain. Energy Technol. Assess. 2020, 39, 13. [Google Scholar] [CrossRef]
- Li, J.J.; Wang, G.D.; Li, Z.H.; Yang, S.L.; Chong, W.T.; Xiang, X.B. A review on development of offshore wind energy conversion system. Int. J. Energy Res. 2020, 44, 9283–9297. [Google Scholar] [CrossRef]
- Castro-Santos, L.; Filgueira-Vizoso, A.; Lamas-Galdo, I.; Carral-Couce, L. Methodology to calculate the installation costs of offshore wind farms located in deep waters. J. Clean. Prod. 2018, 170, 1124–1135. [Google Scholar] [CrossRef]
- Lacal-Arántegui, R.; Yusta, J.M.; Domínguez-Navarro, J.A. Offshore wind installation: Analysing the evidence behind improvements in installation time. Renew. Sust. Energ. Rev. 2018, 92, 133–145. [Google Scholar] [CrossRef]
- Guo, Y.H.; Wang, H.J.; Lian, J.J. Review of integrated installation technologies for offshore wind turbines: Current progress and future development trends. Energy Convers. Manag. 2022, 255, 25. [Google Scholar] [CrossRef]
- Lian, J.J.; Ye, F.D.; Wang, P.W.; Guo, Y.H.; Wang, H.J.; Xiao, T.R.; Xiong, D.Z. Integrated transportation of offshore wind turbine and bucket foundation based on a U and K shaped assembled platform. Ocean Eng. 2023, 275, 16. [Google Scholar] [CrossRef]
- He, B.; Jiang, J.; Cheng, J.; Zheng, J.B.; Wang, D. The capacities of tripod bucket foundation under uniaxial and combined loading. Ocean Eng. 2021, 220, 13. [Google Scholar] [CrossRef]
- Liu, X.Q.; Le, C.H.; Zhao, M.J.; Ding, H.Y.; Zhang, P.Y.; Lv, N.; Luo, S. Experimental Study on Influencing Factors of Motion Responses for Air-Floating Tetrapod Bucket Foundation. China Ocean Eng. 2022, 36, 258–267. [Google Scholar] [CrossRef]
- Chakrabarti, S.K. Scale effects on a unique launch sequence of a gravity-based structure. Appl. Ocean Res. 1995, 17, 33–41. [Google Scholar] [CrossRef]
- Van Kessel, J.L.F. Aircushion Supported Mega-Floaters. Ph.D. Thesis, Technische Universiteit Delft, Delft, The Nederlands, 2010. [Google Scholar]
- Van Kessel, J.L.F.; Pinkster, J.A. The Effect of Aircushion Division on the Structural Loads of Large Floating Offshore Structures. In Proceedings of the ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007. [Google Scholar]
- Van Kessel, J.L.F.; Pinkster, J.A. Wave-induced Structural Loads on Different Types of Aircushion Supported Structures. In Proceedings of the Seventeenth International Offshore and Polar Engineering Conference, Lisbon, Portugal, 1–6 July 2007. [Google Scholar]
- Cheung, K.F.; Phadke, A.C.; Smith, D.A.; Lee, S.K.; Seidl, L.H. Hydrodynamic response of a pneumatic floating platform. Ocean Eng. 2000, 27, 1407–1440. [Google Scholar] [CrossRef]
- Lee, C.H.; Newman, J.N. Wave effects on large floating structures with air cushions. Mar. Struct. 2000, 13, 315–330. [Google Scholar] [CrossRef]
- Pinkster, J.A.; Meevers Scholte, E.J.A. The behaviour of a large air-supported MOB at sea. Mar. Struct. 2001, 14, 163–179. [Google Scholar] [CrossRef]
- Maeda, H.; Ikoma, T.; Masuda, K.; Rheem, C.K. Hydroelastic Behaviors of Large Aircushion Supported Elastic Floating Structures in Regular Waves. In Proceedings of the MTS/IEEE Oceans 2002 Conference, Biloxi, MI, USA, 29–31 October 2002. [Google Scholar]
- Ikoma, T.; Masuda, K.; Maeda, H.; Rheem, C.K. Hydroelastic Behavior of Air-Supported Flexible Floating Structures. In Proceedings of the ASME 2002 21st International Conference on Offshore Mechanics and Arctic Engineering, Oslo, Norway, 23–28 June 2002. [Google Scholar]
- Ikoma, T.; Masuda, K.; Maeda, H.; Rheem, C.K. Effects of Aircushion Division to Hydroelastic Responses of an Aircushion Type Very Large Floating Structure. In Proceedings of the ASME 2003 22nd International Conference on Offshore Mechanics and Arctic Engineering, Cancun, Mexico, 8–13 June 2003. [Google Scholar]
- Ikoma, T.; Masuda, K.; Rheem, C.-K.; Maeda, H. Response Reduction of Motion and Steady Wave Drifting Forces of Floating Bodies Supported by Aircushions in Regular Waves. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006. [Google Scholar]
- Ikoma, T.; Kobayashi, M.; Masuda, K.; Rheem, C.-K.; Maeda, H. A Prediction Method of Hydroelastic Motion of Aircushion Type Floating Structures Considering with Draft Effect into Hydrodynamic Forces. In Proceedings of the ASME 2008 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008. [Google Scholar]
- Næss, T.; Havn, J.; Solaas, F. On the importance of slamming during installation of structures with large suction anchors. Ocean Eng. 2014, 89, 99–112. [Google Scholar] [CrossRef]
- Zhang, P.; Li, Y.e.; Le, C.; Ding, H.; Yang, Z.; Qiang, L. Dynamic characteristics analysis of three-bucket jacket foundation lowering through the splash zone. Renew. Energy 2022, 199, 1116–1132. [Google Scholar] [CrossRef]
- Zhang, P.Y.; Li, Y.E.; Ding, H.Y.; Le, C.H. Response analysis of a lowering operation for a three-bucket jacket foundation for offshore wind turbines. Renew. Energy 2022, 185, 564–584. [Google Scholar] [CrossRef]
- DNV GL. DNVGL-RP-N103 Modelling and Analysis of Marine Operations; Det Norske Veritas: Oslo, Norway, 2017. [Google Scholar]
- Kim, S.R.; Hung, L.C.; Oh, M. Group effect on bearing capacities of tripod bucket foundations in undrained clay. Ocean Eng. 2014, 79, 1–9. [Google Scholar] [CrossRef]
- Wang, L.Z.; Wang, H.; Zhu, B.; Hong, Y. Comparison of monotonic and cyclic lateral response between monopod and tripod bucket foundations in medium dense sand. Ocean Eng. 2018, 155, 88–105. [Google Scholar] [CrossRef]
- Zhang, P.; Han, Y.; Ding, H.; Zhang, S. Field experiments on wet tows of an integrated transportation and installation vessel with two bucket foundations for offshore wind turbines. Ocean Eng. 2015, 108, 769–777. [Google Scholar] [CrossRef]
- DNV. SIMO User Manual Version 4.0 Rev 0; Norwegian Marine Technology Research Institute, Marintek: Trondheim, Norway, 2012. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Symbol | Ratio | Items | Symbol | Ratio |
|---|---|---|---|---|---|
| Line | Ls/Lm | λ | Period | Ts/Tm | λ0.5 |
| Area | As/Am | λ2 | Frequency | fs/fm | λ0.5 |
| Volume | Vs/Vm | λ3 | Mass | Δs/ΔΔm | γλ3 |
| Linear acceleration | as/am | 1 | Force | Fs/Fm | γλ3 |
| Angle | αs/αm | 1 | Moment | Ms/Mm | γλ4 |
| Water density | ρs/ρm | γ | Moment of inertia | Is/Im | γλ5 |
| Parameter | Units | 1:50 Model | Full Scale |
|---|---|---|---|
| Bucket diameter | m | 0.72 | 36.0 |
| Bucket height | m | 0.24 | 12.0 |
| Transition-section height | m | 0.42 | 21.0 |
| Tower height | m | 1.83 | 91.7 |
| Bucket foundation mass | kg | 23.11 | 2,889,000 |
| Tower mass | kg | 3.96 | 494,500 |
| RNA mass | kg | 3.39 | 423,400 |
| Conditions | Sinking Depth | Wave Height | ||
|---|---|---|---|---|
| Model (cm) | Prototype (m) | Model (cm) | Prototype (m) | |
| Condition 1-A~C | 14 | 7 | 1/3/5 | 0.5/1.5/2.5 |
| Condition 2-A~C | 24 | 12 | 1/3/5 | 0.5/1.5/2.5 |
| Condition 3-A~C | 34 | 17 | 1/3/5 | 0.5/1.5/2.5 |
| Condition 4-A~C | 44 | 22 | 1/3/5 | 0.5/1.5/2.5 |
| Condition 5-A~C | 54 | 27 | 1/3/5 | 0.5/1.5/2.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, F.; Lian, J.; Xiao, T.; Xiong, D.; Wang, H.; Guo, Y.; Shao, N. Behavior Analysis of a Bucket Foundation with an Offshore Wind Turbine during the In-Water Sinking Process. J. Mar. Sci. Eng. 2024, 12, 494. https://doi.org/10.3390/jmse12030494
Ye F, Lian J, Xiao T, Xiong D, Wang H, Guo Y, Shao N. Behavior Analysis of a Bucket Foundation with an Offshore Wind Turbine during the In-Water Sinking Process. Journal of Marine Science and Engineering. 2024; 12(3):494. https://doi.org/10.3390/jmse12030494
Chicago/Turabian StyleYe, Fangdi, Jijian Lian, Tianrun Xiao, Dongzhi Xiong, Haijun Wang, Yaohua Guo, and Nan Shao. 2024. "Behavior Analysis of a Bucket Foundation with an Offshore Wind Turbine during the In-Water Sinking Process" Journal of Marine Science and Engineering 12, no. 3: 494. https://doi.org/10.3390/jmse12030494