
Review on Sensors for Sustainable and Safe Maritime Mobility


Abstract
:1. Introduction
Aim of the Paper
2. Methodology
3. Sensor Applications for Structural Health Monitoring of Marine Structures
4. Sensor Application for Vibration and Noise Measurement of Ships
5. Sensor Application for Environmental Measurements
6. Sensor Application for Navigation and Onboard Security
7. Sensor Application for Green Propulsion Plants of Ships
8. Discussions and Future Challenges
Future Views: Internet of Things and the Role of Artificial Intelligence for the Maritime Mobility
9. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Antão, P.; Sun, S.; Teixeira, A.P.; Guedes Soares, C. Quantitative Assessment of Ship Collision Risk Influencing Factors from Worldwide Accident and Fleet Data. Reliab. Eng. Syst. Saf. 2023, 234, 109166. [Google Scholar] [CrossRef]
- Eliopoulou, E.; Alissafaki, A.; Papanikolaou, A. Statistical Analysis of Accidents and Review of Safety Level of Passenger Ships. J. Mar. Sci. Eng. 2023, 11, 410. [Google Scholar] [CrossRef]
- Mueller, N.; Westerby, M.; Nieuwenhuijsen, M. Health Impact Assessments of Shipping and Port-Sourced Air Pollution on a Global Scale: A Scoping Literature Review. Environ. Res. 2023, 216, 114460. [Google Scholar] [CrossRef] [PubMed]
- Parra, L.; Viciano-Tudela, S.; Carrasco, D.; Sendra, S.; Lloret, J. Low-Cost Microcontroller-Based Multiparametric Probe for Coastal Area Monitoring. Sensors 2023, 23, 1871. [Google Scholar] [CrossRef] [PubMed]
- Kishore Sonti, V.J.K.; Sundari, G.; Bernatin, T. Ecological Observing Using Sensor and IoT to Protect the Global Warming in WSN. In Proceedings of the 2023 International Conference on Recent Trends in Electronics and Communication (ICRTEC), Virtual, 10–11 February 2023. [Google Scholar]
- Mehrpooya, M.; Ganjali, M.R.; Mousavi, S.A.; Hedayat, N.; Allahyarzadeh, A. Comprehensive Review of Fuel-Cell-Type Sensors for Gas Detection. Ind. Eng. Chem. Res. 2023, 62, 2387–2409. [Google Scholar] [CrossRef]
- Thombre, S.; Zhao, Z.; Ramm-Schmidt, H.; Vallet Garcia, J.M.; Malkamaki, T.; Nikolskiy, S.; Hammarberg, T.; Nuortie, H.; Bhuiyan, M.Z.H.; Sarkka, S.; et al. Sensors and AI Techniques for Situational Awareness in Autonomous Ships: A Review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 64–83. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C. A Review of Oil Spill Remote Sensing. Sensors 2017, 18, 91. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Tian, X.; Peng, T.; Luo, Y. A Review of the State-of-the-Art Developments in the Field Monitoring of Offshore Structures. Ocean Eng. 2018, 147, 148–164. [Google Scholar] [CrossRef]
- Swartz, R.A.; Zimmerman, A.T.; Lynch, J.P.; Rosario, J.; Brady, T.; Salvino, L.; Law, K.H. Hybrid Wireless Hull Monitoring System for Naval Combat Vessels. Struct. Infrastruct. Eng. 2012, 8, 621–638. [Google Scholar] [CrossRef]
- Kiddy, J.S.; Baldwin, C.S.; Salter, T.; Chen, P.C. Structural Load Monitoring of the RV Triton Using Fiber Optic Sensors. In Smart Structures and Materials 2002: Industrial and Commercial Applications of Smart Structures Technologies; McGowan, A.-M.R., Ed.; SPIE: St. Bellingham, WA, USA, 2002; pp. 462–472. [Google Scholar]
- Raptodimos, Y.; Lazakis, I.; Theotokatos, G.; Varelas, T.; Drikos, L. Ship Sensors Data Collection & Analysis for Condition Monitoring of Ship Structures & Machinery Systems. In Proceedings of the Smart Ships Technology 2016, London, UK, 26–27 January 2016; RINA: Genoa, Italy, 2016; pp. 77–86. [Google Scholar]
- Parunov, J.; Pedišić-Buča, M.; Gatin, I.; Ćatipović, I. Hydrodynamic Tests of Innovative Tourist Submarine. J. Mar. Sci. Eng. 2023, 11, 1199. [Google Scholar] [CrossRef]
- Wang, G.; Pran, K.; Sagvolden, G.; Havsgård, G.B.; Jensen, A.E.; Johnson, G.A.; Vohra, S.T. Ship Hull Structure Monitoring Using Fibre Optic Sensors. Smart Mater. Struct. 2001, 10, 472–478. [Google Scholar] [CrossRef]
- Mieloszyk, M.; Majewska, K.; Ostachowicz, W. Application of Embedded Fibre Bragg Grating Sensors for Structural Health Monitoring of Complex Composite Structures for Marine Applications. Mar. Struct. 2021, 76, 102903. [Google Scholar] [CrossRef]
- Kang, I.; Schulz, M.J.; Kim, J.H.; Shanov, V.; Shi, D. A Carbon Nanotube Strain Sensor for Structural Health Monitoring. Smart Mater. Struct. 2006, 15, 737–748. [Google Scholar] [CrossRef]
- Xu, T.; Qiu, Q.; Lu, S.; Ma, K.; Wang, X. Multi-Direction Health Monitoring with Carbon Nanotube Film Strain Sensor. Int. J. Distrib. Sens. Netw. 2019, 15, 155014771982968. [Google Scholar] [CrossRef]
- Alexopoulos, N.D.; Bartholome, C.; Poulin, P.; Marioli-Riga, Z. Structural Health Monitoring of Glass Fiber Reinforced Composites Using Embedded Carbon Nanotube (CNT) Fibers. Compos. Sci. Technol. 2010, 70, 260–271. [Google Scholar] [CrossRef]
- Sabra, K.G.; Huston, S. Passive Structural Health Monitoring of a High-Speed Naval Ship from Ambient Vibrations. J. Acoust. Soc. Am. 2011, 129, 2991–2999. [Google Scholar] [CrossRef]
- Torkildsen, H.E.; Grøvlen, Å.; Skaugen, A.; Wang, G.; Jensen, A.E.; Pran, K.; Sagvolden, G. Development and Applications of Full-Scale Ship Hull Health Monitoring Systems for the Royal Norwegian Navy; RTO: Neuilly-sur-Seine, France, 2005. [Google Scholar]
- Kefal, A.; Mayang, J.B.; Oterkus, E.; Yildiz, M. Three Dimensional Shape and Stress Monitoring of Bulk Carriers Based on iFEM Methodology. Ocean Eng. 2018, 147, 256–267. [Google Scholar] [CrossRef]
- Kefal, A.; Oterkus, E. Displacement and Stress Monitoring of a Chemical Tanker Based on Inverse Finite Element Method. Ocean Eng. 2016, 112, 33–46. [Google Scholar] [CrossRef]
- Bucci, V.; Corigliano, P.; Crupi, V.; Epasto, G.; Guglielmino, E.; Marinò, A. Experimental Investigation on Iroko Wood Used in Shipbuilding. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2017, 231, 128–139. [Google Scholar] [CrossRef]
- Fan, J.; Guo, X.; Wu, C.; Crupi, V.; Guglielmino, E. Influence of Heat Treatments on Mechanical Behavior of FV520B Steel. Exp. Tech. 2015, 39, 55–64. [Google Scholar] [CrossRef]
- Tighe, R.C.; Dulieu-Barton, J.M.; Quinn, S. Infrared Techniques for Practical Defect Identification in Bonded Joints in Liquefied Natural Gas Carriers. Exp. Tech. 2018, 42, 121–128. [Google Scholar] [CrossRef]
- Crupi, V.; Chiofalo, G.; Guglielmino, E. Using Infrared Thermography in Low-Cycle Fatigue Studies of Welded Joints. Weld. J. 2010, 89, 195–200. [Google Scholar]
- Li, H.C.H.; Herszberg, I.; Davis, C.E.; Mouritz, A.P.; Galea, S.C. Health Monitoring of Marine Composite Structural Joints Using Fibre Optic Sensors. Compos. Struct. 2006, 75, 321–327. [Google Scholar] [CrossRef]
- Saeedifar, M.; Saleh, M.N.; Krairi, A.; de Freitas, S.T.; Zarouchas, D. Structural Integrity Assessment of a Full-Scale Adhesively-Bonded Bi-Material Joint for Maritime Applications. Thin-Walled Struct. 2023, 184, 110487. [Google Scholar] [CrossRef]
- Rogers, L.M. Application of Acoustic Emission Technology for Health Monitoring of Ship Structures; Ship Structure Committee: Washington, DC, USA, 2014. [Google Scholar]
- Edwards, R.; Prislin, I.; Johnson, T.; Campman, C.; Leverette, S.; Halkyard, J. Review of 17 Real-Time, Environment, Response, and Integrity Monitoring Systems on Floating Production Platforms in the Deep Waters of the Gulf of Mexico. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 8 April 2005. [Google Scholar]
- Gerner, M.B.; Perryman, S.R.; Geyer, J.F.; von Aschwege, J.T. Marine Monitoring of Gulf of Mexico Deepwater Floating Systems. In Proceedings of the All Days, OTC, Houston, TX, USA, 30 April 2007. [Google Scholar]
- Mieloszyk, M.; Ostachowicz, W. An Application of Structural Health Monitoring System Based on FBG Sensors to Offshore Wind Turbine Support Structure Model. Mar. Struct. 2017, 51, 65–86. [Google Scholar] [CrossRef]
- Chung, W.C.; Pestana, G.R.; Kim, M. Structural Health Monitoring for TLP-FOWT (Floating Offshore Wind Turbine) Tendon Using Sensors. Appl. Ocean Res. 2021, 113, 102740. [Google Scholar] [CrossRef]
- Gordelier, T.; Thies, P.R.; Rinaldi, G.; Johanning, L. Investigating Polymer Fibre Optics for Condition Monitoring of Synthetic Mooring Lines. J. Mar. Sci. Eng. 2020, 8, 103. [Google Scholar] [CrossRef]
- Gordon, R.B.; Brown, M.G.; Allen, E.M. Mooring Integrity Management: A State-of-the-Art Review. In Proceedings of the Offshore Technology Conference, OTC, Houston, TX, USA, 5–8 May 2014. [Google Scholar]
- Sakaris, C.S.; Yang, Y.; Bashir, M.; Michailides, C.; Wang, J.; Sakellariou, J.S.; Li, C. Structural Health Monitoring of Tendons in a Multibody Floating Offshore Wind Turbine under Varying Environmental and Operating Conditions. Renew. Energy 2021, 179, 1897–1914. [Google Scholar] [CrossRef]
- Nguyen, T.T.D.; Park, J.W.; Nguyen, V.M.; Yoon, H.K.; Jung, J.C.; Lee, M.M.S. Experimental Study on Application of an Optical Sensor to Measure Mooring-Line Tension in Waves. J. Ocean Eng. Technol. 2022, 36, 153–160. [Google Scholar] [CrossRef]
- Wu, W.; Feng, J.; Xie, B.; Tang, D.; Yue, Q.; Xie, R. Development and Sensing Properties Study of Underwater Assembled Water Depth-Inclination Sensors for a Multi-Component Mooring System, Using a Self-Contained Technique. Sensors 2016, 16, 1925. [Google Scholar] [CrossRef] [PubMed]
- Wang, S. Damage Detection in Offshore Platform Structures from Limited Modal Data. Appl. Ocean Res. 2013, 41, 48–56. [Google Scholar] [CrossRef]
- Hillis, A.J.; Courtney, C.R.P. Structural Health Monitoring of Fixed Offshore Structures Using the Bicoherence Function of Ambient Vibration Measurements. J. Sound Vib. 2011, 330, 1141–1152. [Google Scholar] [CrossRef]
- Tseranidis, S.; Theodoridis, L.; Loukogeorgaki, E.; Angelides, D.C. Investigation of the Condition and the Behavior of a Modular Floating Structure by Harnessing Monitoring Data. Mar. Struct. 2016, 50, 224–242. [Google Scholar] [CrossRef]
- Chung, J.S.; International Society of Offshore and Polar Engineers. The Proceedings of the Twenty-Third (2013) International Offshore and Polar Engineering Conference: Anchorage, AK, USA, 30 June–5 July 2013: ISOPE-2013 Anchorage; International Society of Offshore and Polar Engineers: Mountain View, CA, USA, 2013; ISBN 9781880653999. [Google Scholar]
- Chu, C.; Zuo-Xi, Z.; Xin-Rong, K.E.; Yun-Zhi, G. The Research of Machinery Fault Feature Extraction Methods Based on Vibration Signal. IFAC-Pap. 2018, 51, 346–352. [Google Scholar] [CrossRef]
- Gilroy, L. Ship Noise Management and the ORCA Class of Ships. Mar. Pollut. Bull. 2022, 174, 113196. [Google Scholar] [CrossRef]
- McCormick, M.I.; Allan, B.J.M.; Harding, H.; Simpson, S.D. Boat Noise Impacts Risk Assessment in a Coral Reef Fish but Effects Depend on Engine Type. Sci. Rep. 2018, 8, 3847. [Google Scholar] [CrossRef]
- Virto, L.R.; Dumez, H.; Romero, C.; Bailly, D. How Can Ports Act to Reduce Underwater Noise from Shipping? Identifying Effective Management Frameworks. Mar. Pollut. Bull. 2022, 174, 113136. [Google Scholar] [CrossRef]
- Du, T.; Zuo, X.; Dong, F.; Li, S.; Mtui, A.E.; Zou, Y.; Zhang, P.; Zhao, J.; Zhang, Y.; Sun, P.; et al. A Self-Powered and Highly Accurate Vibration Sensor Based on Bouncing-Ball Triboelectric Nanogenerator for Intelligent Ship Machinery Monitoring. Micromachines 2021, 12, 218. [Google Scholar] [CrossRef]
- Poveda-Martínez, P.; Ramis-Soriano, J. A Comparison between Psychoacoustic Parameters and Condition Indicators for Machinery Fault Diagnosis Using Vibration Signals. Appl. Acoust. 2020, 166, 107364. [Google Scholar] [CrossRef]
- Gerhard, K.L. Non-Intrusive Vibration Monitoring in US Naval and US Coast Guard Ships. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2013. [Google Scholar]
- Lee, J.K.; Seung, H.M.; Park, C.I.; Lee, J.K.; Lim, D.H.; Kim, Y.Y. Magnetostrictive Patch Sensor System for Battery-Less Real-Time Measurement of Torsional Vibrations of Rotating Shafts. J. Sound Vib. 2018, 414, 245–258. [Google Scholar] [CrossRef]
- Han, H.; Lee, K.; Park, S. Estimate of the Fatigue Life of the Propulsion Shaft from Torsional Vibration Measurement and the Linear Damage Summation Law in Ships. Ocean Eng. 2015, 107, 212–221. [Google Scholar] [CrossRef]
- Zhao, Y.; Sun, Z.; Li, W.; Tian, K.; Zhan, Z.; Shan, P.; Li, L. Sea Ice Type and Thickness Identification Based on Vibration Sensor Networks and Machine Learning. IEEE Trans. Instrum. Meas. 2023, 72, 2512111. [Google Scholar] [CrossRef]
- Liu, H.; Fu, M.; Jin, X.; Shang, Y.; Shindell, D.; Faluvegi, G.; Shindell, C.; He, K. Health and Climate Impacts of Ocean-Going Vessels in East Asia. Nat. Clim. Chang. 2016, 6, 1037–1041. [Google Scholar] [CrossRef]
- Matthias, V.; Bewersdorff, I.; Aulinger, A.; Quante, M. The Contribution of Ship Emissions to Air Pollution in the North Sea Regions. Environ. Pollut. 2010, 158, 2241–2250. [Google Scholar] [CrossRef]
- Sofiev, M.; Winebrake, J.J.; Johansson, L.; Carr, E.W.; Prank, M.; Soares, J.; Vira, J.; Kouznetsov, R.; Jalkanen, J.-P.; Corbett, J.J. Cleaner Fuels for Ships Provide Public Health Benefits with Climate Tradeoffs. Nat. Commun. 2018, 9, 406. [Google Scholar] [CrossRef]
- Dsouza, V.L.; Dsouza, S.F.; Sarosh, M.; Kukkilaya, S.; Chilimbi, V.; Fernandes, S.R. Remotely Controlled Boat for Water Quality Monitoring and Sampling. Mater. Today Proc. 2021, 47, 2391–2400. [Google Scholar] [CrossRef]
- Jayaratne, R.; Kuhn, T.; Christensen, B.; Liu, X.; Zing, I.; Lamont, R.; Dunbabin, M.; Maddox, J.; Fisher, G.; Morawska, L. Using a Network of Low-Cost Particle Sensors to Assess the Impact of Ship Emissions on a Residential Community. Aerosol Air Qual. Res. 2020, 20, 2754–2764. [Google Scholar] [CrossRef]
- Zhou, F.; Fan, Y.; Zou, J.; An, B. Ship Emission Monitoring Sensor Web for Research and Application. Ocean Eng. 2022, 249, 110980. [Google Scholar] [CrossRef]
- Sørensen, M.K.; Vinding, M.S.; Bakharev, O.N.; Nesgaard, T.; Jensen, O.; Nielsen, N.C. NMR Sensor for Onboard Ship Detection of Catalytic Fines in Marine Fuel Oils. Anal. Chem. 2014, 86, 7205–7208. [Google Scholar] [CrossRef]
- Deng, M.; Peng, S.; Xie, X.; Jiang, Z.; Hu, J.; Qi, Z. A Diffused Mini-Sniffing Sensor for Monitoring SO2 Emissions Compliance of Navigating Ships. Sensors 2022, 22, 5198. [Google Scholar] [CrossRef]
- Beecken, J.; Mellqvist, J.; Salo, K.; Ekholm, J.; Jalkanen, J.-P. Airborne Emission Measurements of SO2, NOx and Particles from Individual Ships Using a Sniffer Technique. Atmos. Meas. Tech. 2014, 7, 1957–1968. [Google Scholar] [CrossRef]
- Kattner, L.; Mathieu-Üffing, B.; Burrows, J.P.; Richter, A.; Schmolke, S.; Seyler, A.; Wittrock, F. Monitoring Compliance with Sulfur Content Regulations of Shipping Fuel by in Situ Measurements of Ship Emissions. Atmos. Chem. Phys. 2015, 15, 10087–10092. [Google Scholar] [CrossRef]
- Pirjola, L.; Pajunoja, A.; Walden, J.; Jalkanen, J.-P.; Rönkkö, T.; Kousa, A.; Koskentalo, T. Mobile Measurements of Ship Emissions in Two Harbour Areas in Finland. Atmos. Meas. Tech. 2014, 7, 149–161. [Google Scholar] [CrossRef]
- Passig, J.; Schade, J.; Irsig, R.; Li, L.; Li, X.; Zhou, Z.; Adam, T.; Zimmermann, R. Detection of Ship Plumes from Residual Fuel Operation in Emission Control Areas Using Single-Particle Mass Spectrometry. Atmos. Meas. Tech. 2021, 14, 4171–4185. [Google Scholar] [CrossRef]
- Yuan, S.; Li, Y.; Bao, F.; Xu, H.; Yang, Y.; Yan, Q.; Zhong, S.; Yin, H.; Xu, J.; Huang, Z.; et al. Marine Environmental Monitoring with Unmanned Vehicle Platforms: Present Applications and Future Prospects. Sci. Total Environ. 2023, 858, 159741. [Google Scholar] [CrossRef]
- Jo, W.; Hoashi, Y.; Paredes Aguilar, L.L.; Postigo-Malaga, M.; Garcia-Bravo, J.M.; Min, B.-C. A Low-Cost and Small USV Platform for Water Quality Monitoring. HardwareX 2019, 6, e00076. [Google Scholar] [CrossRef]
- Cao, H.; Guo, Z.; Wang, S.; Cheng, H.; Zhan, C. Intelligent Wide-Area Water Quality Monitoring and Analysis System Exploiting Unmanned Surface Vehicles and Ensemble Learning. Water 2020, 12, 681. [Google Scholar] [CrossRef]
- Yaakob, O.; Mohamed, Z.; Hanafiah, M.S.; Suprayogi, D.; Abdul Ghani, M.; Adnan, F.; Mukti, M.; Din, J. Development of Unmanned Surface Vehicle (USV) for Sea Patrol and Environmental Monitoring. In Proceedings of the International Conference on Marine Technology, Kuala Terengganu, Malaysia, 20–22 October 2012. [Google Scholar]
- Cryer, S.; Carvalho, F.; Wood, T.; Strong, J.A.; Brown, P.; Loucaides, S.; Young, A.; Sanders, R.; Evans, C. Evaluating the Sensor-Equipped Autonomous Surface Vehicle C-Worker 4 as a Tool for Identifying Coastal Ocean Acidification and Changes in Carbonate Chemistry. J. Mar. Sci. Eng. 2020, 8, 939. [Google Scholar] [CrossRef]
- Chang, H.-C.; Hsu, Y.-L.; Hung, S.-S.; Ou, G.-R.; Wu, J.-R.; Hsu, C. Autonomous Water Quality Monitoring and Water Surface Cleaning for Unmanned Surface Vehicle. Sensors 2021, 21, 1102. [Google Scholar] [CrossRef] [PubMed]
- Glenn, S.M.; Miles, T.N.; Seroka, G.N.; Xu, Y.; Forney, R.K.; Yu, F.; Roarty, H.; Schofield, O.; Kohut, J. Stratified Coastal Ocean Interactions with Tropical Cyclones. Nat. Commun. 2016, 7, 10887. [Google Scholar] [CrossRef] [PubMed]
- da Silva, D.C.; dos Santos Lucas, C.R.; de Moraes Juviniano, H.B.; de Alencar Moura, M.C.P.; Dantas Neto, A.A.; de Castro Dantas, T.N. Novel Produced Water Treatment Using Microemulsion Systems to Remove Oil Contents. J. Water Process Eng. 2020, 33, 101006. [Google Scholar] [CrossRef]
- Lee, J.; Cho, W.-C.; Poo, K.-M.; Choi, S.; Kim, T.-N.; Son, E.-B.; Choi, Y.-J.; Kim, Y.M.; Chae, K.-J. Refractory Oil Wastewater Treatment by Dissolved Air Flotation, Electrochemical Advanced Oxidation Process, and Magnetic Biochar Integrated System. J. Water Process Eng. 2020, 36, 101358. [Google Scholar] [CrossRef]
- Zhang, N.; Yang, X.; Wang, Y.; Qi, Y.; Zhang, Y.; Luo, J.; Cui, P.; Jiang, W. A Review on Oil/Water Emulsion Separation Membrane Material. J. Environ. Chem. Eng. 2022, 10, 107257. [Google Scholar] [CrossRef]
- Jafarzadeh, H.; Mahdianpari, M.; Homayouni, S.; Mohammadimanesh, F.; Dabboor, M. Oil Spill Detection from Synthetic Aperture Radar Earth Observations: A Meta-Analysis and Comprehensive Review. GIsci. Remote Sens. 2021, 58, 1022–1051. [Google Scholar] [CrossRef]
- Budiman, F.; Ismardi, A.; Hardinah, T.; Muhammad, R.; Nurwijayadi; Hartaman, A.; Nurhidayat, A.; Sasto, I.H.S.; Sutapa, I.D.A. Strengthening Oil Pollution Monitoring System in Aquatic Environment through Development of IoT-Based Oil-Water Separator Device. Ecohydrol. Hydrobiol. 2023, in press. [Google Scholar] [CrossRef]
- Ma, J.; Meng, F.; Zhou, Y.; Wang, Y.; Shi, P. Intelligent Water Pollution Source Identification and Localization in Wireless Sensor Networks. In Proceedings of the 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 25–27 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1300–1305. [Google Scholar]
- Hidalgo, F.; Mendoza, J.; Cuellar, F. ROV-Based Acquisition System for Water Quality Measuring. In Proceedings of the OCEANS 2015—MTS/IEEE, Washington, DC, USA, 9–22 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Subash, T.D.; Pradeep, A.S.; Rajan Joseph, A.; Jacob, A.; Jayaraj, P.S. Intelligent Collision Avoidance System for Fishing Boat. Mater. Today Proc. 2020, 24, 2457–2463. [Google Scholar] [CrossRef]
- Helgesen, Ø.K.; Vasstein, K.; Brekke, E.F.; Stahl, A. Heterogeneous Multi-Sensor Tracking for an Autonomous Surface Vehicle in a Littoral Environment. Ocean Eng. 2022, 252, 111168. [Google Scholar] [CrossRef]
- Takkinen, E.; Ruponen, P.; Pennanen, P. Required Flooding Sensor Arrangement for Reliable Automatic Damage Detection. In Proceedings of the Smart Ship Technology, London, UK, 24–25 January 2017. [Google Scholar]
- Braidotti, L.; Valčić, M.; Prpić-Oršić, J. Exploring a Flooding-Sensors-Agnostic Prediction of the Damage Consequences Based on Machine Learning. J. Mar. Sci. Eng. 2021, 9, 271. [Google Scholar] [CrossRef]
- García, E.; Quiles, E.; Correcher, A.; Morant, F. Marine NMEA 2000 Smart Sensors for Ship Batteries Supervision and Predictive Fault Diagnosis. Sensors 2019, 19, 4480. [Google Scholar] [CrossRef]
- Dudojc, B.; Mindykowski, J. New Approach to Analysis of Selected Measurement and Monitoring Systems Solutions in Ship Technology. Sensors 2019, 19, 1775. [Google Scholar] [CrossRef]
- Li, T.; Hua, M.; Yin, Q. The Temperature Forecast of Ship Propulsion Devices from Sensor Data. Information 2019, 10, 316. [Google Scholar] [CrossRef]
- Szelangiewicz, T.; Żelazny, K.; Antosik, A.; Szelangiewicz, M. Application of Measurement Sensors and Navigation Devices in Experimental Research of the Computer System for the Control of an Unmanned Ship Model. Sensors 2021, 21, 1312. [Google Scholar] [CrossRef]
- Wright, R.G. Intelligent Autonomous Ship Navigation Using Multi-Sensor Modalities. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 503–510. [Google Scholar] [CrossRef]
- Tiwari, D.; Bhati, B.S.; Nagpal, B.; Sankhwar, S.; Al-Turjman, F. An Enhanced Intelligent Model: To Protect Marine IoT Sensor Environment Using Ensemble Machine Learning Approach. Ocean Eng. 2021, 242, 110180. [Google Scholar] [CrossRef]
- Rødseth, Ø.J.; Wennersberg, L.A.L.; Nordahl, H. Improving Safety of Interactions between Conventional and Autonomous Ships. Ocean Eng. 2023, 284, 115206. [Google Scholar] [CrossRef]
- Lee, Y.C.; Hoang, V.A. Battery-Free and Real-Time Wireless Sensor System on Marine Propulsion Shaft Using a Wireless Power Transfer Module. Sensors 2023, 23, 558. [Google Scholar] [CrossRef]
- Vettor, R.; Szlapczynska, J.; Szlapczynski, R.; Tycholiz, W.; Soares, C.G. Towards Improving Optimised Ship Weather Routing. Pol. Marit. Res. 2020, 27, 60–69. [Google Scholar] [CrossRef]
- Lee, H.-J.; Park, D.-J. Analysis of Thermal Characteristics of MEMS Sensors for Measuring the Rolling Period of Maritime Autonomous Surface Ships. J. Mar. Sci. Eng. 2022, 10, 859. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P.S. Advancements in the Field of Autonomous Underwater Vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Cui, Y.; Zhu, P.; Lei, G.; Chen, P.; Yang, G. Energy-Efficient Multiple Autonomous Underwater Vehicle Path Planning Scheme in Underwater Sensor Networks. Electronics 2023, 12, 3321. [Google Scholar] [CrossRef]
- Huy, D.Q.; Sadjoli, N.; Azam, A.B.; Elhadidi, B.; Cai, Y.; Seet, G. Object Perception in Underwater Environments: A Survey on Sensors and Sensing Methodologies. Ocean Eng. 2023, 267, 113202. [Google Scholar] [CrossRef]
- Wang, Y.; Cao, Q.; Liu, L.; Wu, Y.; Liu, H.; Gu, Z.; Zhu, C. A Review of Low and Zero Carbon Fuel Technologies: Achieving Ship Carbon Reduction Targets. Sustain. Energy Technol. Assess. 2022, 54, 102762. [Google Scholar] [CrossRef]
- Kim, K.; Roh, G.; Kim, W.; Chun, K. A Preliminary Study on an Alternative Ship Propulsion System Fueled by Ammonia: Environmental and Economic Assessments. J. Mar. Sci. Eng. 2020, 8, 183. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Al Labadidi, M.; Hamada, A.T.; Orhan, M.F. Design and Utilization of a Direct Methanol Fuel Cell. Membranes 2022, 12, 1266. [Google Scholar] [CrossRef]
- Gautam, P.; Neha; Upadhyay, S.N.; Dubey, S.K. Bio-Methanol as a Renewable Fuel from Waste Biomass: Current Trends and Future Perspective. Fuel 2020, 273, 117783. [Google Scholar] [CrossRef]
- Acanfora, M.; Altosole, M.; Balsamo, F.; Campora, U.; Scamardella, F. A Methanol Fueled Marine Engine Simulator for Fast Craft Applications. In HSMV 2023: Proceedings of the 13th Symposium on High Speed Marine Vehicles; IOS Press: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Padolecchia, D.; Utzeri, S.; Marinò, A.; Bucci, V. Feasibility Study for the Fuel Switch of a Fast Ferry. In HSMV 2023; IOS Press: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Kim, B.; Hwang, K.-I. Experimental Analysis of the Effects of Ship Motion on Hydrogen Dispersion in an Enclosed Area. Int. J. Hydrogen Energy 2023, 48, 31779–31789. [Google Scholar] [CrossRef]
- Coppola, T.; De Luca, F.; Gambardella, S.; Mancini, S.; Micoli, L.; Pensa, C.; Sorrentino, V. Feasibility Study of a Zero-Emission Passenger Catamaran Ferry Operating in Italian Coastal Island. In HSMV 2023: Proceedings of the 13th Symposium on High Speed Marine Vehicles; IOS Press: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Teoh, Y.H.; How, H.G.; Le, T.D.; Nguyen, H.T.; Loo, D.L.; Rashid, T.; Sher, F. A Review on Production and Implementation of Hydrogen as a Green Fuel in Internal Combustion Engines. Fuel 2023, 333, 126525. [Google Scholar] [CrossRef]
- Gainey, B.; Yan, Z.; Gandolfo, J.; Lawler, B. Methanol and Wet Ethanol as Interchangeable Fuels for Internal Combustion Engines: LCA, TEA, and Experimental Comparison. Fuel 2023, 333, 126257. [Google Scholar] [CrossRef]
- Takeda, M.; Matsuno, Y.; Kodama, I.; Kumakura, H.; Weisend, J.G.; Barclay, J.; Breon, S.; Demko, J.; DiPirro, M.; Kelley, J.P.; et al. Characteristics of Mgb2 Sensor for Detecting Level of Liquid Hydrogen. AIP Conf. Proc. 2008, 985, 933–939. [Google Scholar]
- Nakano, A.; Shimazaki, T.; Sekiya, M.; Shiozawa, H.; Ohtsuka, K.; Aoyagi, A.; Iwakiri, T.; Mikami, Z.; Sato, M.; Sugino, Y.; et al. Research and Development of Liquid Hydrogen (LH2) Temperature Monitoring System for Marine Applications. Int. J. Hydrogen Energy 2021, 46, 15649–15659. [Google Scholar] [CrossRef]
- Logan, K.P. Intelligent Diagnostic Requirements of Future All-Electric Ship Integrated Power System. IEEE Trans. Ind. Appl. 2007, 43, 139–149. [Google Scholar] [CrossRef]
- Choi, C.H.; Yu, S.; Han, I.-S.; Kho, B.-K.; Kang, D.-G.; Lee, H.Y.; Seo, M.-S.; Kong, J.-W.; Kim, G.; Ahn, J.-W.; et al. Development and Demonstration of PEM Fuel-Cell-Battery Hybrid System for Propulsion of Tourist Boat. Int. J. Hydrogen Energy 2016, 41, 3591–3599. [Google Scholar] [CrossRef]
- Koumentakos, A. Developments in Electric and Green Marine Ships. Appl. Syst. Innov. 2019, 2, 34. [Google Scholar] [CrossRef]
- Jinasena, A.; Spitthoff, L.; Wahl, M.S.; Lamb, J.J.; Shearing, P.R.; Strømman, A.H.; Burheim, O.S. Online Internal Temperature Sensors in Lithium-Ion Batteries: State-of-the-Art and Future Trends. Front. Chem. Eng. 2022, 4, 804704. [Google Scholar] [CrossRef]
- Wang, H.; Morando, S.; Gaillard, A.; Hissel, D. Sensor Development and Optimization for a Proton Exchange Membrane Fuel Cell System in Automotive Applications. J. Power Sources 2021, 487, 229415. [Google Scholar] [CrossRef]
- Kurniawan, A. A Review of Solar-Powered Boat. Development. IPTEK J. Technol. Sci. 2016, 27, 1–8. [Google Scholar] [CrossRef]
- Spagnolo, G.S.; Papalillo, D.; Martocchia, A.; Makary, G. Solar-Electric Boat. J. Transp. Technol. 2012, 02, 144–149. [Google Scholar] [CrossRef]
- Plumet, F.; Pêtrès, C.; Romero-Ramirez, M.A.; Gas, B.; Ieng, S.H. Toward an Autonomous Sailing Boat. IEEE J. Ocean Eng. 2015, 40, 397–407. [Google Scholar] [CrossRef]
- Park, S.; Yang, C.-S.; Kim, J. Design of Vessel Data Lakehouse with Big Data and AI Analysis Technology for Vessel Monitoring System. Electronics 2023, 12, 1943. [Google Scholar] [CrossRef]
- Song, Y.; Shin, H.; Koo, S.; Baek, S.; Seo, J.; Kang, H.; Kim, Y. Internet of Maritime Things Platform for Remote Marine Water Quality Monitoring. IEEE Internet Things J. 2022, 9, 14355–14365. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, S.; Xiang, X.; Vasilijević, A.; Mišković, N.; Nađ, Đ. Cloud-Based Mission Control of USV Fleet: Architecture, Implementation and Experiments. Control Eng. Pract. 2021, 106, 104657. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aim of the Study | Analysis Technique | References |
|---|---|---|
| Monitoring fast Patrol boat | Bragg grating sensors | [15] |
| Mitigating post-processing troubles after strain measurements | Carbon nanotube polymer strain sensor | [16] |
| Evaluating multidirectional strain properties | Carbon nanotube sensors | [17] |
| SHM of nonconductive composites | Carbon nanotube sensors | [18] |
| SHM of HSV-2 Swift catamaran | Strain gages | [19] |
| SHM of HNOMS Otra Vessel | Strain and temperature sensors | [20] |
| Infinite Finite Element Method (iFEM) applications | Fiber Bragg Sensors | [21,22] |
| Health monitoring of materials and joints | Thermography | [23,24,25,26] |
| Health monitoring of composite joints | Fiber Bragg Sensors | [27] |
| Health monitoring of full-scale bi-material joint | Acoustic emission | [28] |
| Aim of the Study | Analysis Technique | References |
|---|---|---|
| Waves interactions with offshore structures | Wave buoy | [30] |
| Measuring waves properties | X-band radar | [31] |
| Monitoring wind turbine support structure (tripod) | Fiber Bragg grating sensors | [32] |
| Monitoring TLP (tension-leg-platform) of floating offshore wind turbines | Inclinometers Bi-axial sensors and top tension meters | [33] |
| Ropes monitoring for offshore structures | Polymer Fiber Optics | [34] |
| Mooring lines monitoring | In-line load cells, inclinometers, strain gauges | [35] |
| Structural Health Monitoring of Tendons in a Multibody Floating Offshore Wind Turbine | Accelerometers | [36] |
| Measuring tension of mooring lines of a moored platform in waves | Optical sensors | [37] |
| Recording the geometry varieties of multi-component mooring lines | Water depth inclination sensor | [38] |
| Analysis Technique | Field of Application | Technical Features | Costs |
|---|---|---|---|
| Wave buoy | Weight height Weight period Weight direction | −20–20 m 1.5–33 s 0–360° | Deployment 30,000 $ Maintenance 170,000 $ per year Repair 25,000 $ |
| X-band Radar | Weight height Weight period Weight direction | 0.5–20 m 3.5–40 s 0–360° | Up to $900 million |
| Air Gap Sensor | Weight height Weight period | 0–60 m 0–20 s | - |
| Aim of the Study | Analysis Technique | References |
|---|---|---|
| Detection of catalytic fines into fuel oil | Low-field nuclear magnetic resonance (NMR) sensor | [59] |
| Monitoring ship’s emissions by means of UAV | Mini-sniffing sensor | [60] |
| Airborne and in situ shipping emissions monitoring | and sensor | [61,62] |
| Van-based laboratory for static measurement of shipping emissions | sensor | [63] |
| Single particle mass spectrometry for long-distance monitoring from the coast | Sniffing sensors | [64] |
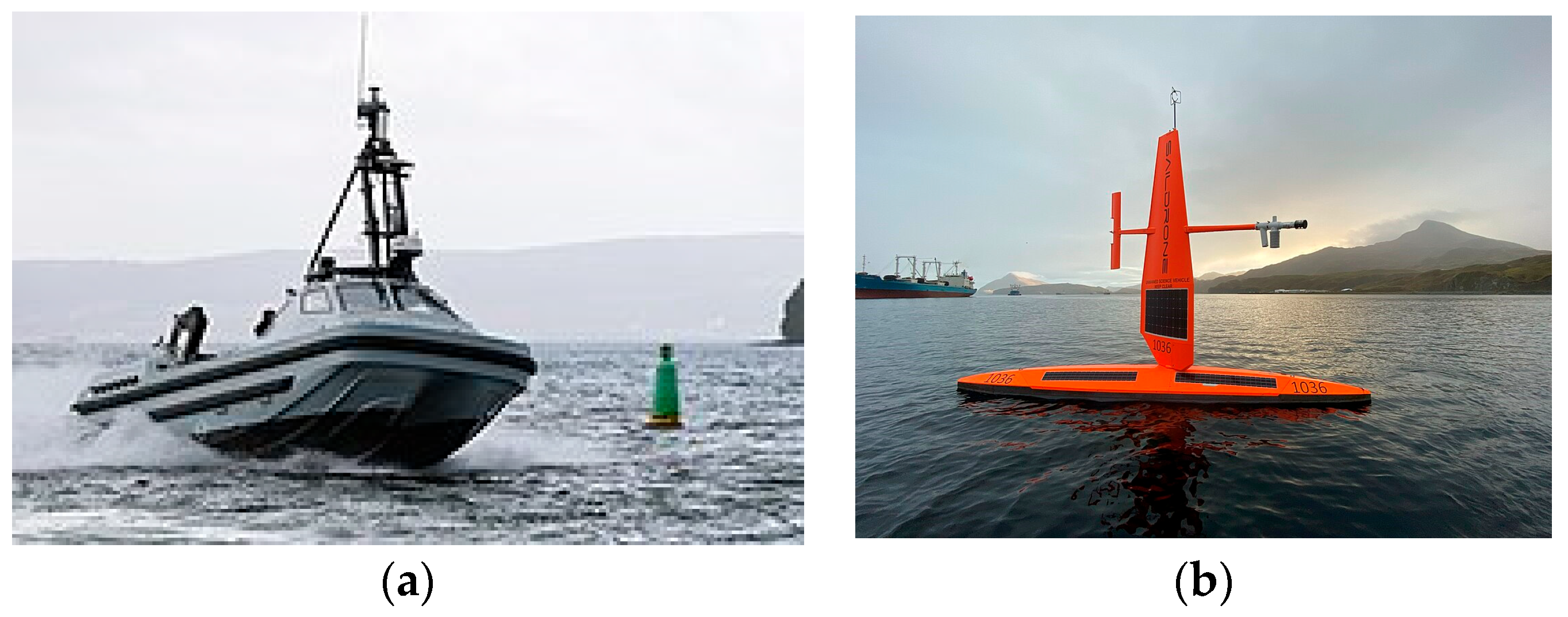
| Marine environmental monitoring by means of UAVs, USVs (Unmanned surface vehicles), USs (Underwater Gliders), UGs (Underwater Gliders) | RGB Cameras, Multispectral, and Hyperspectral sensors | [65] |
| Analysis Technique | Field of Application | Range of Application |
|---|---|---|
| RGB | Fluid flow tracking, aerial photogrammetry | 400–700 nm |
| LiDAR | Terrain mapping, erosion studies | 905 nm |
| Hyperspectral | Water quality, classification studies | 900–1700 nm |
| Multispectral | Vegetation mapping, water quality | 400–700 nm, 655 nm 725 nm, 800 nm |
| Analysis Technique | Field of Application | Technical Features |
|---|---|---|
| APNA 360 Horiba | measurements | Measuring range: 0–1000 ppb Detection Threshold: 0.5 ppb |
| CO12M Environment S.A. | measurements | Measuring range: 0–50 ppm |
| Thermo Environmental Instruments, model 43 C | measurements | Measuring ranges: From 0–0.5 to 100 ppm |
| VA 3100, Horiba | measurements | Measuring range: 0–100 ppm |
| HMP45A Vaisala Pt 1000 IEC 751 1/3 Class B | Environmental temperature measurement | Measurement range: |
| CUBIC Laser Particle Sensor PM2012SE-A/PM2012SE-B | Detecting particle concentration size between 0.3 and 10 μm in the air and real-time output PM1.0, PM2.5, PM10 in μg/m3 directly via mathematical algorithm and scientific calibration. | Measurement particle 0.3–10 μm Measurement range 0~5000 μg/m3 Accuracy PM1.0/PM2.5: 0~100 μg/m3, ±10 μg/m3; 101 μg/m3~500 μg/m3, ±10% of reading PM10: 0~100 μg/m3, ±25 μg/m3; 101~500 μg/m3, ±25% of reading (GRIMM, 25 ± 2 °C, 50 ± 10%RH) |
| Analysis Technique | Field of Application | Cost | Technical Features |
|---|---|---|---|
| Analog pH Sensor/Meter Kit For Arduino | pH measurement | 29.50 $ | - |
| Analog Turbidity Sensor for Arduino | Turbidity measurement | 9.90 $ | - |
| Temperature Waterproof DS18B20 Sensor Kit | Water temperature measurement | 7.50 $ | - |
| EM506 (GPS) | Position | 39.95 $ | - |
| Telesky pH Sensor | pH measurement | - | Range: 0–14 Working Voltage (5 V) Accuracy (%) |
| WAAAX TDS Sensor | Total Dissolved solids measurements | - | Range: 0–1000 ppm Working Voltage (3.3–5 V) Accuracy (%) |
| EIXPSY Turbidity Sensor | Turbidity measurement | - | Range: 0–4000 NTU (turbidity unit) Working Voltage (5 V) Accuracy (%) |
| DS5-DS5X Multi Probe | Ambient light, ammonia, chloride, chlorophyll, rhodamine WT, conductivity, depth, dissolved oxygen, nitrate, ORP, pH, temperature, total dissolved gas, turbidity, blue-green algae measurements | 14,000–17,000 $ | - |
| RBR Temperature Sensor | Aged glass thermistors for temperature monitoring of water | - | Accuracy: |
| RBR Dissolved Sensor | Optic dynamic luminescence quenching for detection | - | |
| Nortek Signature 500 Acoustic Doppler current profiler (ADCP) | Current profiling, wave height measurements | - | (velocity resolution) |
| U-BLOX GPS | Position | - | Accuracy: Position 2.5 m Velocity 0.1 m/s Heading 0.5 |
| Aim of the Study | Analysis Technique | References |
|---|---|---|
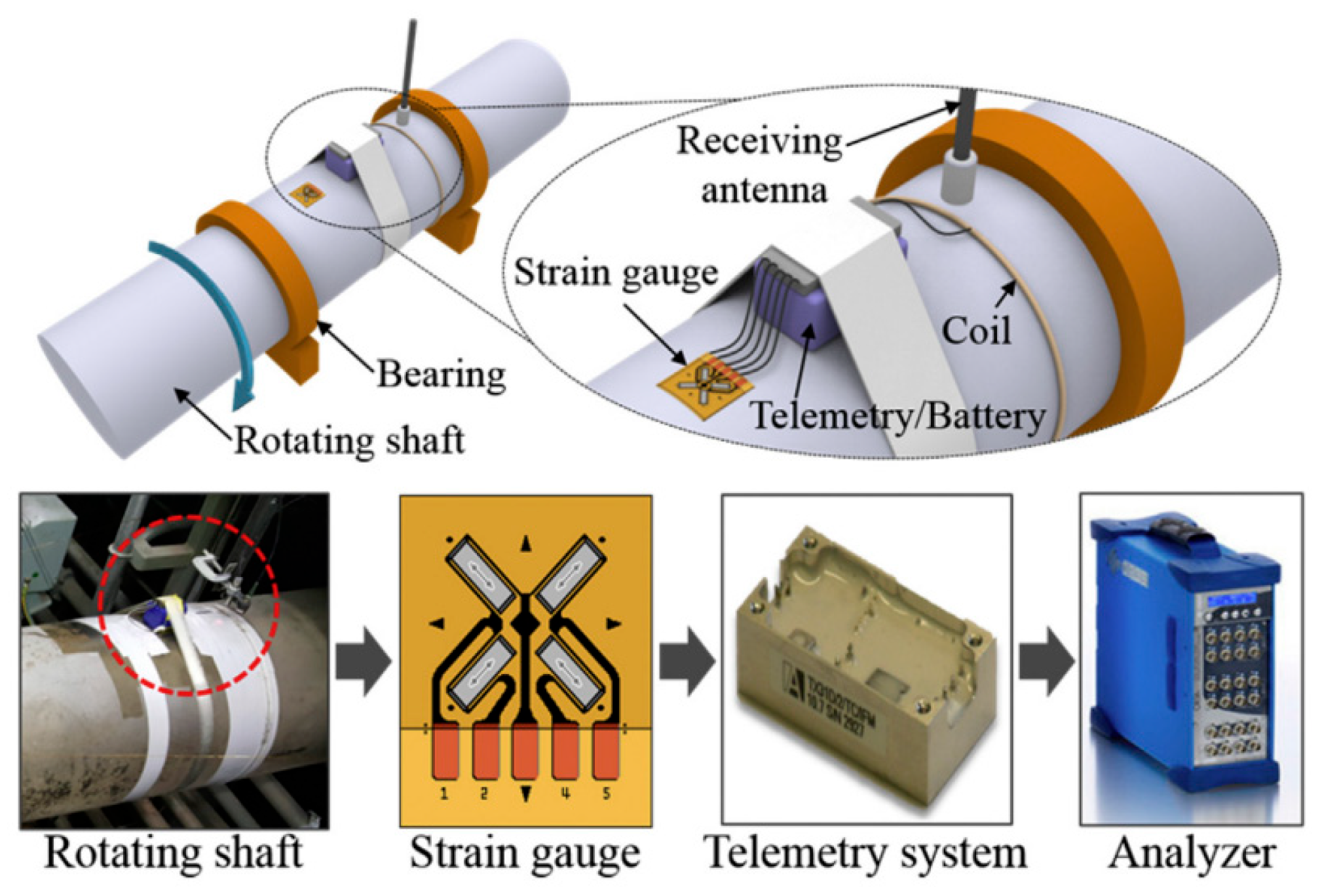
| Monitoring rotating machines | Powerless non-contact sensors | [90] |
| Finding the best route considering the influence of sea state | Accelerometers, strain gauges | [91] |
| Evaluation of sensors’ error in function of the variation of the temperature on maritime autonomous surface ships | Microelectromechanical system sensors | [92] |
| Analysis Technique | Technical Specifications | Cost |
|---|---|---|
| TMP36 Temperature sensor | Low voltage operation (2.7 V to 5.5 V) Calibrated directly in °C 10 mV/°C scale factor ±2 °C accuracy over temperature Specified −40 °C to +125 °C, operation to +150 °C Less than 50 μA quiescent current Shutdown current 0.5 μA max | 15 $ |
| INA 219 CHIP (Current Sensor) | Operational Voltage: 3–5.5 Volts Operating Temperature: −400–1250 °C Maximum Voltage: 6 Volts Bus Voltage Range: 0–26 Volts Current sensing Range: ±3.2 A with ±0.8 mA resolution 0.1 ohm 1% 2 W current sense resistor | 18 $ |
| SparkFun Load Cell Amplifier HX711 | Operation Voltage: 2.7–5 V Operation Current: <1.5 mA Selectable 10SPS or 80SPS output data rate Simultaneous 50 and 60 Hz supply rejection | 11 $ |
| Omega Strain Gauges SGD | Nominal resistance from 120 to 1000 Maximum bridge excitation voltage from 2.5 to 37 V | 150–250 $ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Briguglio, G.; Crupi, V. Review on Sensors for Sustainable and Safe Maritime Mobility. J. Mar. Sci. Eng. 2024, 12, 353. https://doi.org/10.3390/jmse12020353
Briguglio G, Crupi V. Review on Sensors for Sustainable and Safe Maritime Mobility. Journal of Marine Science and Engineering. 2024; 12(2):353. https://doi.org/10.3390/jmse12020353
Chicago/Turabian StyleBriguglio, Giovanni, and Vincenzo Crupi. 2024. "Review on Sensors for Sustainable and Safe Maritime Mobility" Journal of Marine Science and Engineering 12, no. 2: 353. https://doi.org/10.3390/jmse12020353