
Integrating Software FMEA and STPA to Develop a Bayesian Network-Based Software Risk Model for Autonomous Ships
 , and
, and
Abstract
:1. Introduction
- ■
- In this paper, we propose a framework that leverages Software FMEA and STPA for identifying potential functional failures in software modules and their interactions. While the Software FMEA emphasizes internal software reliability and potential software failures, such as unstable algorithms and inadequate coverage, STPA offers insights into the interactions among software modules, highlighting issues such as inconsistent or incomplete data flows. These findings are crucial for evaluating the risks associated with the software involved in the autonomous control process.
- ■
- The complementary results from Software FMEA and STPA are directly converted into BN, which enhances the development of the software risk assessment model by specifying the nodes included in the BN and the structural relationships between the nodes. Such a framework enables a combination of diverse hazard sources and facilitates the quantification of uncertainties and dependencies within complex, software-intensive systems.
2. Methods
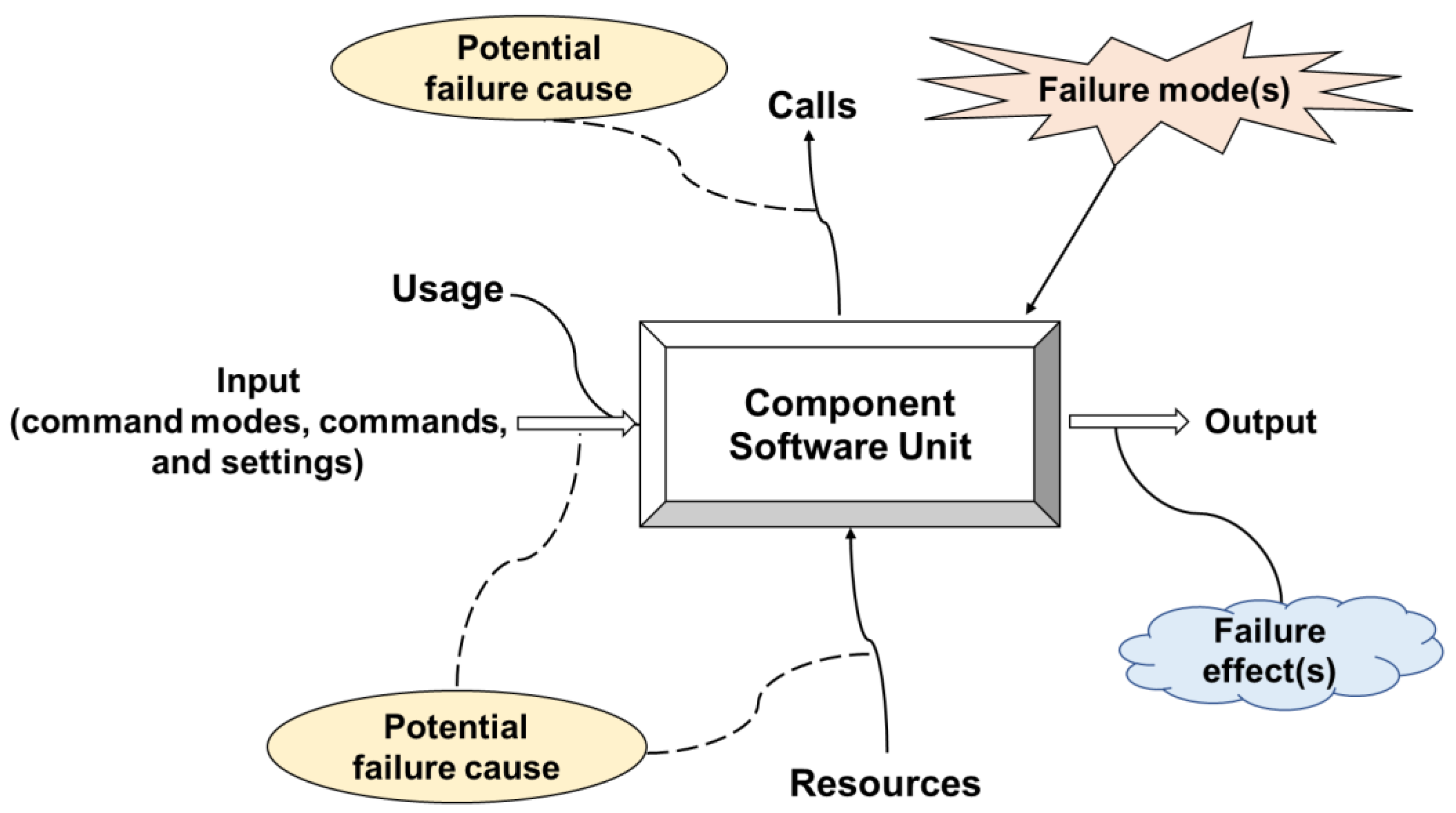
2.1. Software FMEA
2.2. STPA
2.3. Bayesian Networks
2.4. The Proposed Framework in the Context of Software Risk Assessment for Autonomous Ships
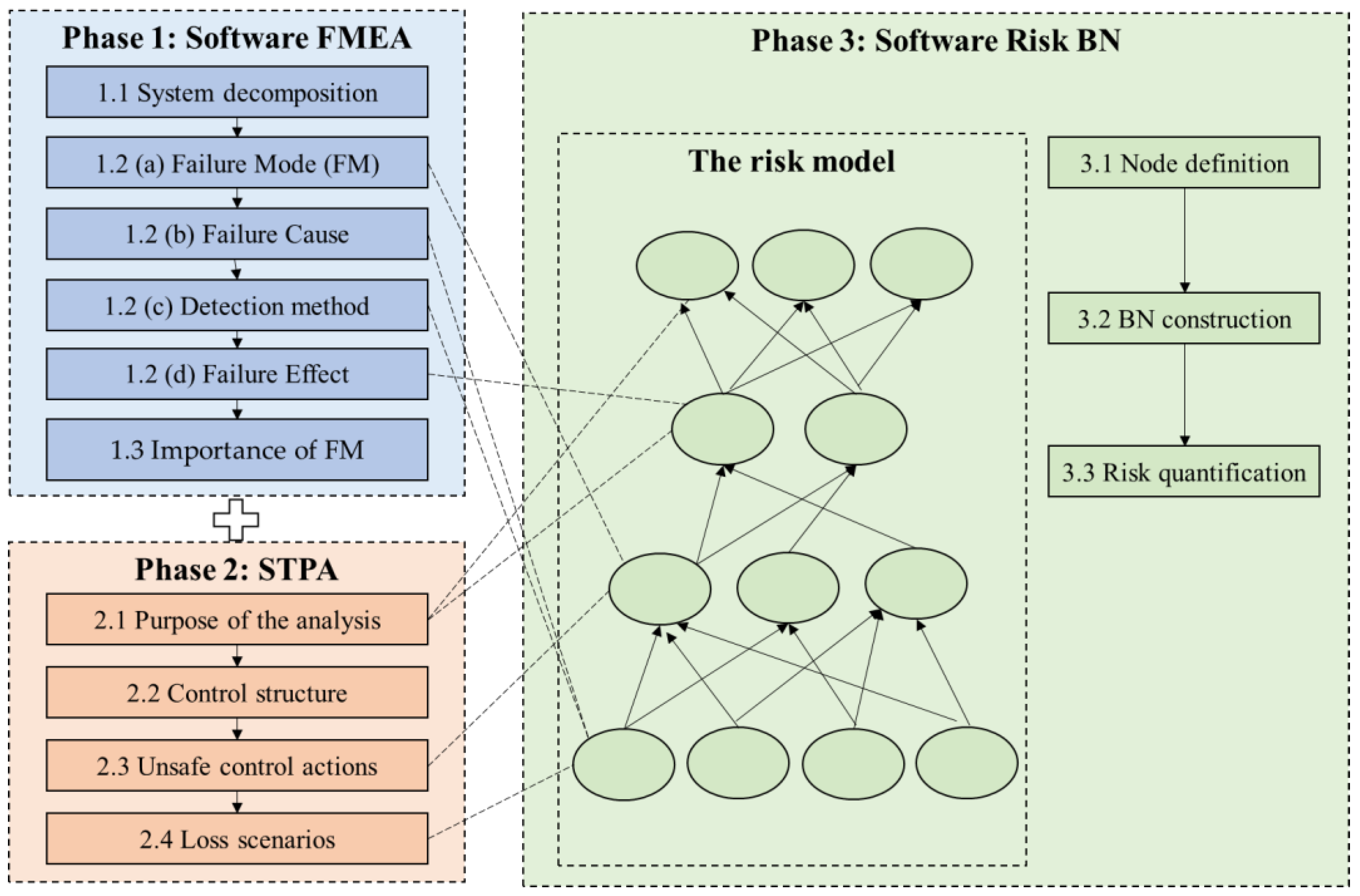
2.4.1. Phase 1: Analyse Software Failure Modes and Their Impacts Based on Software FMEA
- Step 1.1: Analyse the software architecture to decompose the software into modules for further analysis.
- Step 1.2: Identify potential failure modes, detection methods, their causes, and local and final effects for the objects of analysis. The possible software failure modes and causes could cover data, timing, interface, logic or computation, resources, assumptions, operating conditions, etc. [52]. The detection methods are means to identify the failure modes, which are the existing measures by allowing operators to intervene and reduce the likelihood of failures or mitigate adverse effects [33].
- Step 1.3: Evaluate the relative importance of failure modes, including determining the severity of the failure’s final effect and the likelihood of a failure mode. The criticality can be determined using Risk Priority Number (RPN) by evaluating the severity, occurrence, and detectability of software failure effects (S, O, and D, respectively) (Equation (2)).
- Severity (S): Determine the severity value while considering potential failure consequences.
- Occurrence (O): Assess the likelihood of occurrence, factoring in complexity, potential failure modes, and causes.
- Detectability (D): The detectability hinges on the intricacy of hardware/software components and potential failure causes.
2.4.2. Phase 2: Identify Interaction Defects between Software Modules
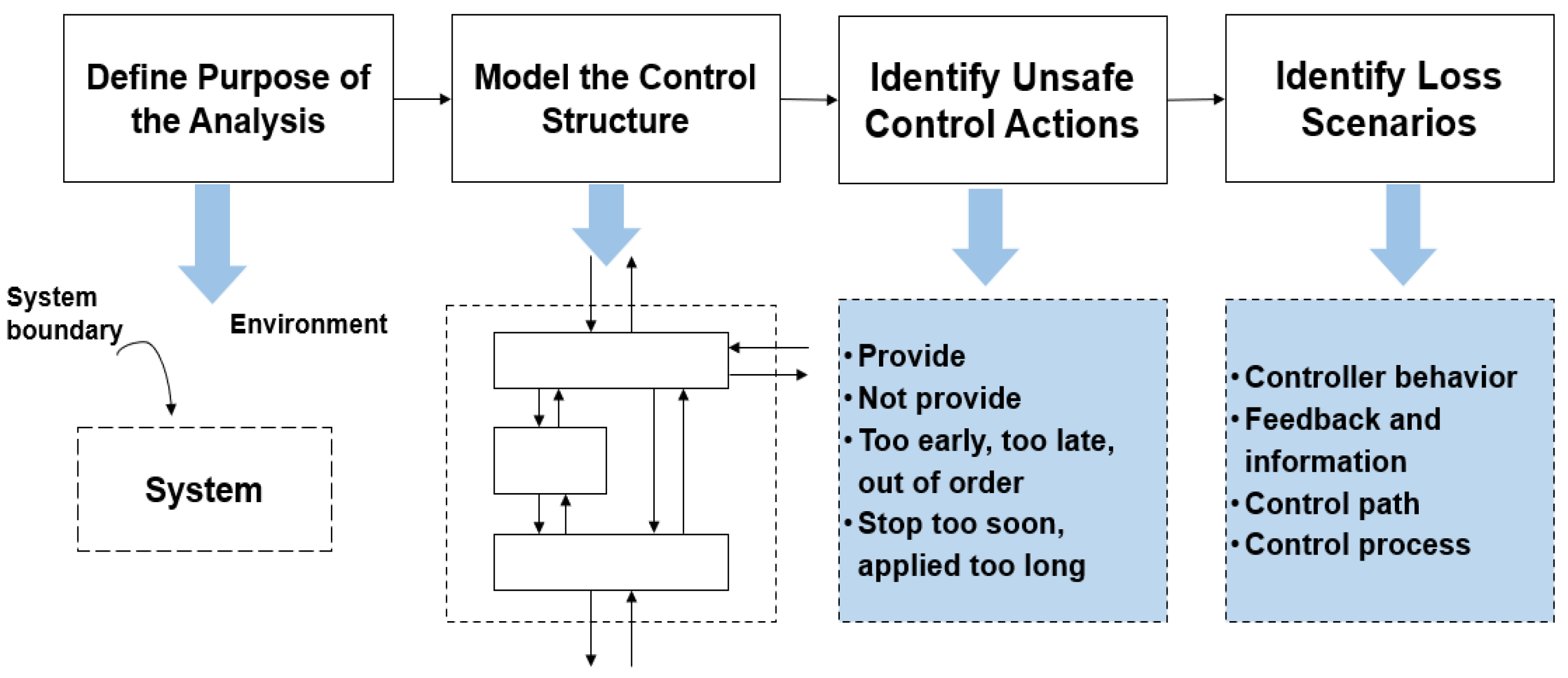
- Step 2.1: Define the purpose of the analysis. The initial step involves defining the study’s purpose and system boundaries. It encompasses identifying potential losses (Ls), system-level hazards (Hs), and system constraints (SCs). Safety constraints, which are crucial for ensuring system safety, are established as mandatory conditions or rules that the system must adhere to.
- Step 2.2: Model the control structure. This step involves constructing a control structure comprising controllers, control actions, and a feedback loop, which are supplemented by additional inputs and outputs from various system components. Responsibilities are assigned to each controller to ensure effective system management.
- Step 2.3: Identify unsafe control actions (UCAs). This process entails pinpointing control actions that, under certain circumstances or in extreme cases, might lead to hazards. The objective is to explore how these UCAs could result in the hazards initially identified. Each UCA is characterized by five critical aspects: the responsible controller, the context of occurrence, the type of UCA, the specific action or command, and the potential hazards or sub-hazards it might activate. Additionally, controller constraints are established to outline necessary behaviours to prevent UCAs.
- Step 2.4: Identify loss scenarios. This step involves outlining scenarios that could lead to UCAs and subsequently result in hazards. Two primary scenarios are scrutinized—those explaining UCAs’ emergence and those detailing flawed or missing execution of UCAs leading to hazards. To identify these scenarios, the process often involves tracing back from the UCA to determine the influencing factors acting on the controller’s decisions regarding control actions.
2.4.3. Phase 3: Develop Risk Models Using a BN Based on Results from Software FMEA and STPA
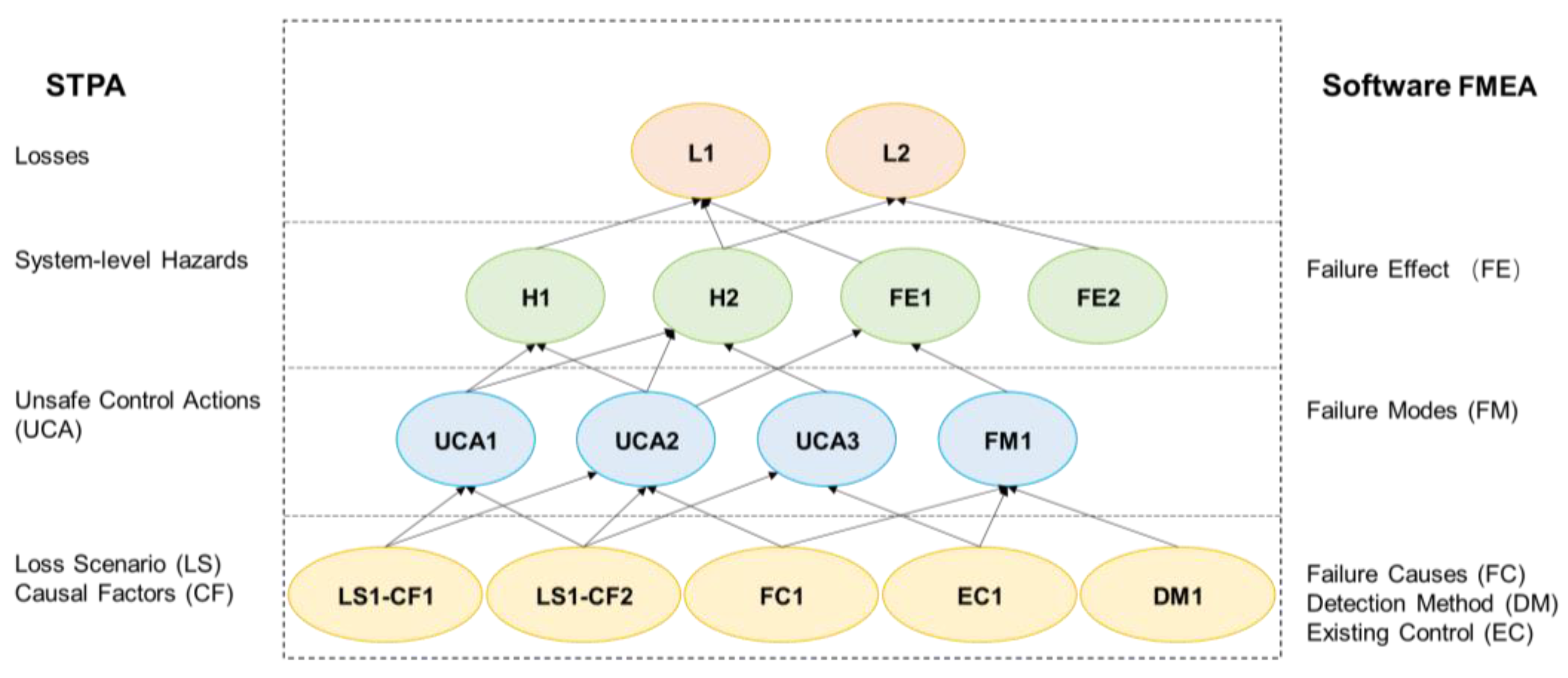
- Step 3.1: Define nodes included in the software risk assessment model. The outcomes from STPA that are considered for modelling are losses (Ls), system-level hazards (Hs), UCAs, loss scenarios for UCAs, and causal factors [7]. Nodes for failure modes (FMs), failure causes (FCs), detection methods (DMs), and failure effects (FEs) derived from Software FMEA are also created as variables in the BN. Common hazards and causes may be identified from both methods, as revealed by [53]. Therefore, the findings should be consolidated to merge similar modes and harmonize the different ones.
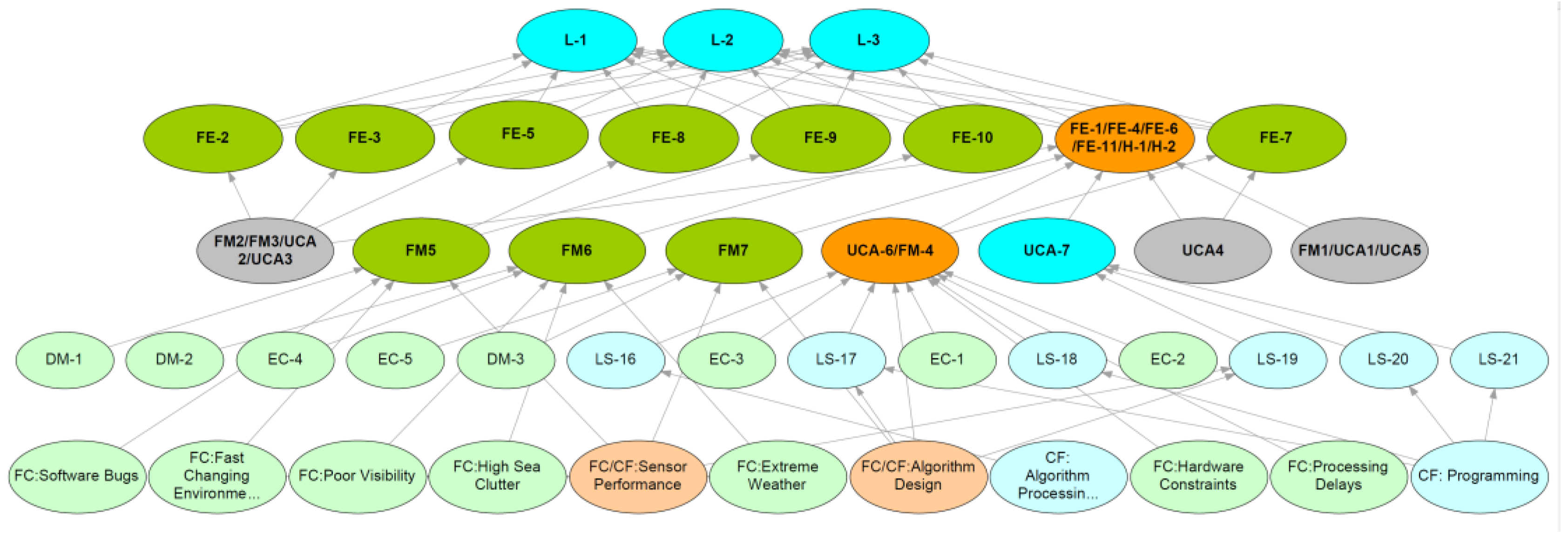
- Step 3.2: Define the relationship among nodes and the BN structure. Establish directional links between nodes that have a causal relationship. The target node is defined as the losses from STPA, which are caused by system-level hazards as the succeeding layer (see Figure 4). The hazards are caused by UCAs, and the UCAs are caused by causal scenarios. In cases where the failure effects identified by Software FMEA complement the list of system-level hazards, they are modelled at the same level. The same applies to failure modes and failure causes. The detection method is considered a causal factor for failure modes.
3. Illustrative Case Study
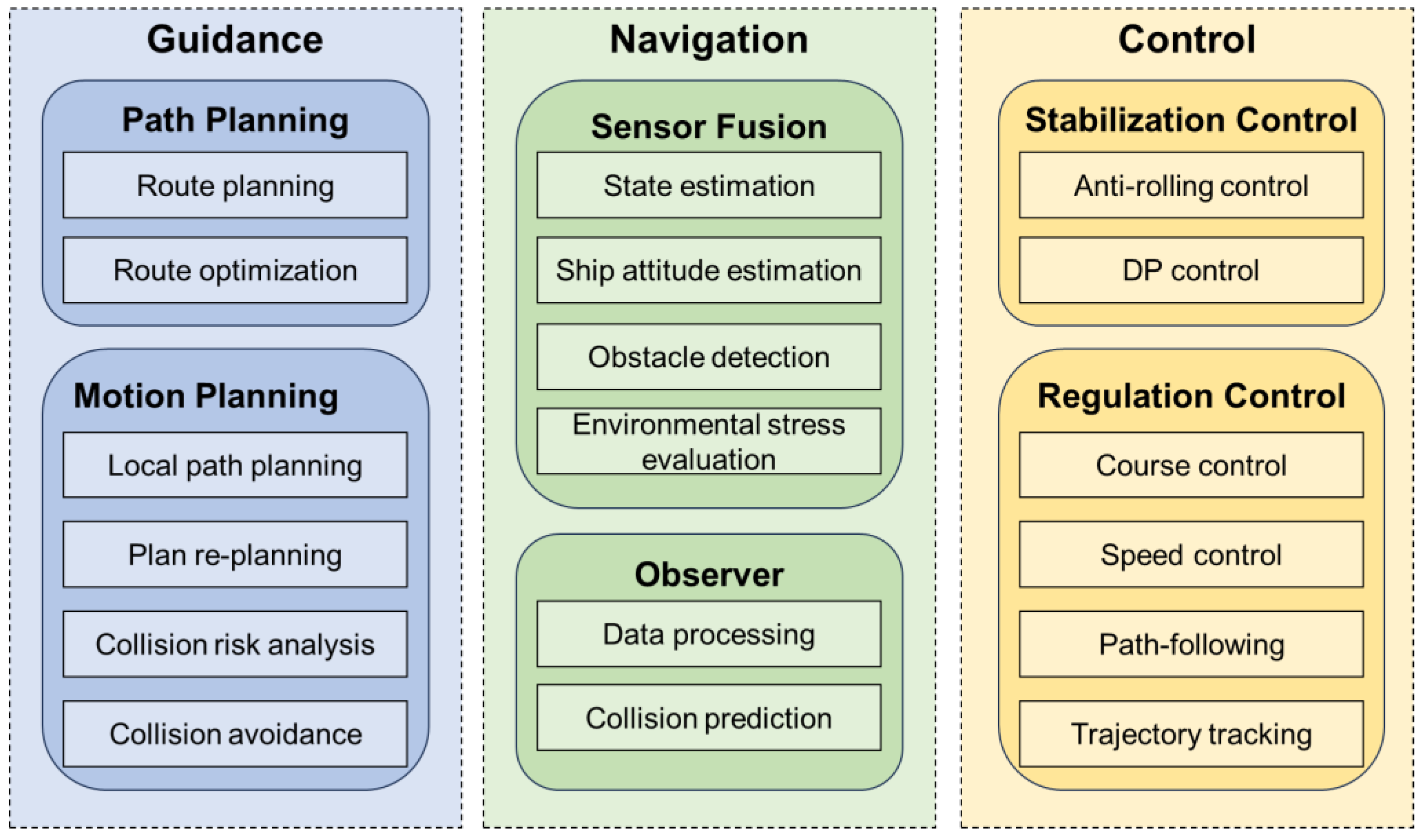
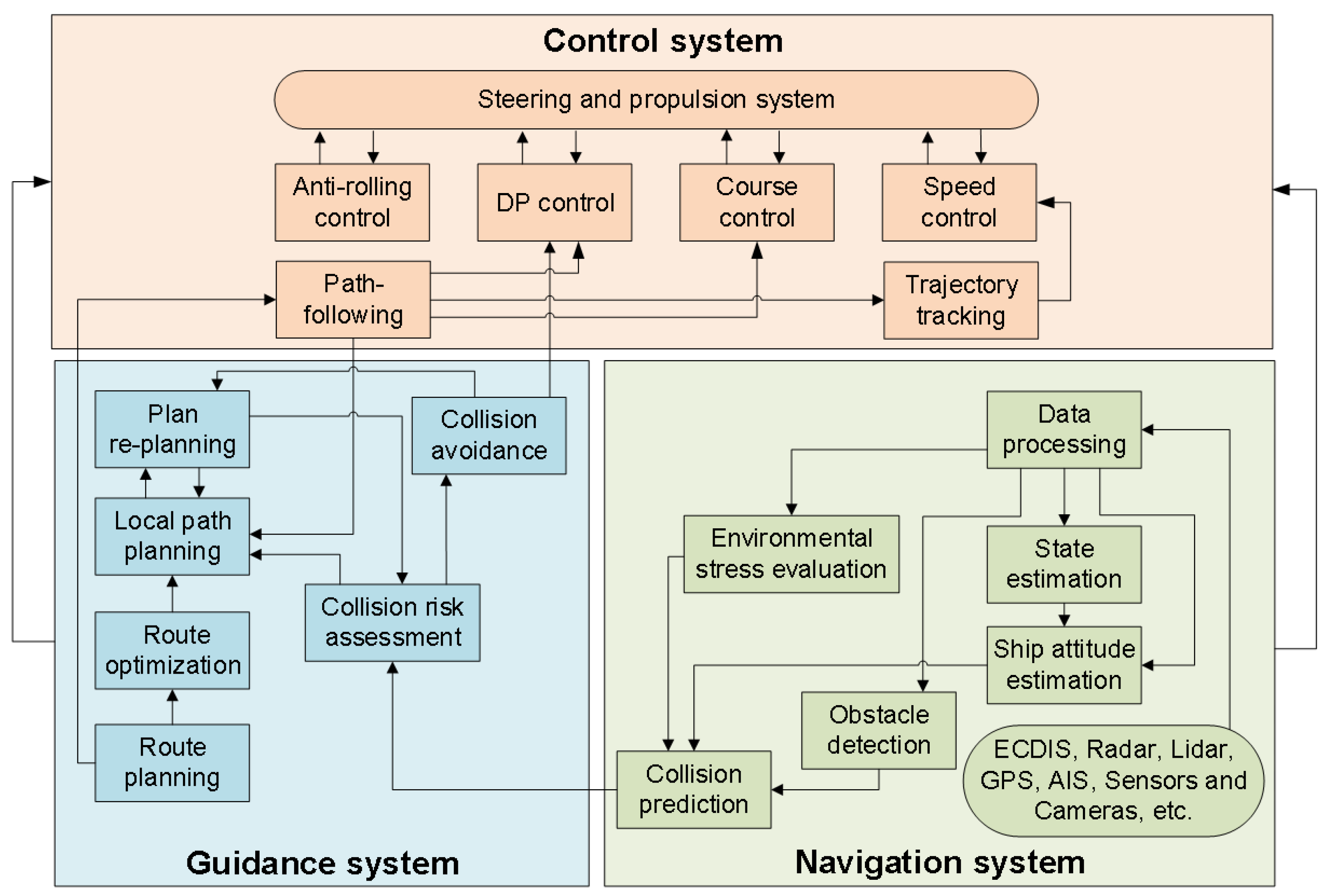
3.1. System Description
3.2. Phase 1—Software FMEA
3.2.1. Decompose the Software System
3.2.2. Identify Failure Mode, Failure Causes, Detection Method, and Effects
3.2.3. Evaluate Relative Importance of Failure Modes
3.3. Phase 2—STPA
3.3.1. Define the Purpose of the Analysis
- H1: Entry of other vessels into the ship’s safety domain
- H2: Intrusion of static obstacles into the ship’s safety domain
3.3.2. Model the Control Structure
3.3.3. Identify Unsafe Control Actions (UCAs) and Loss Scenarios
3.4. Phase 3—BN
3.4.1. Define Nodes Included in the Software Risk Assessment Model
3.4.2. Define the Relationship among Nodes and the BN Structure
4. Main Results and Key Findings from the Case Study
4.1. Key Findings from Phase 1
4.2. Key Findings from Phase 2
4.3. Key Findings from Phase 3
5. Discussion
5.1. Industrial Implications for Software Development Related to Autonomous Ships
5.1.1. Enhancing Hazard Identification in Autonomous Ship Software Development through Software FMEA and STPA Integration
5.1.2. Need for Standardization of Software Architecture for Autonomous Ships
5.1.3. Risk Assessment for AI-Based Autonomous Systems
5.2. Quantification Based on BN
5.3. Limitation and Further Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maritime-Executive. Yara Birkeland Begins Further Testing for Autonomous Operations. Available online: https://maritime-executive.com/ (accessed on 10 September 2023).
- Oceancrew. China Launches Its First Autonomous Container Ship Service. Available online: https://oceancrew.org/ (accessed on 10 September 2023).
- LNGPirme. Hyundai Samho Says H-Line’s New LNG Bulker Features “AI engineer”. Available online: https://lngprime.com (accessed on 10 September 2023).
- Jovanovic, I.; Percic, M.; Korican, M.; Vladimir, N.; Fan, A.L. Investigation of the Viability of Unmanned Autonomous Container Ships under Different Carbon Pricing Scenarios. J. Mar. Sci. Eng. 2022, 10, 1991. [Google Scholar] [CrossRef]
- Jovanovic, I.; Vladimir, N.; Percic, M.; Korican, M. The feasibility of autonomous low-emission ro-ro passenger shipping in the Adriatic Sea. Ocean Eng. 2022, 247, 110712. [Google Scholar] [CrossRef]
- Negenborn, R.R.; Goerlandt, F.; Johansen, T.A.; Slaets, P.; Valdez Banda, O.A.; Vanelslander, T.; Ventikos, N.P. Autonomous ships are on the horizon: Here’s what we need to know. Nature 2023, 615, 30–33. [Google Scholar] [CrossRef] [PubMed]
- China Classification Society. Rules for Intelligent Ships 2023; China Classification Society: Beijing, China, 2023. [Google Scholar]
- Det Norske Veritas. Autonomous and Remotely Operated Ships; Det Norske Veritas: Oslo, Norway, 2021. [Google Scholar]
- American Bureau of Shipping. Autonomous Vessels Whitepaper; American Bureau of Shipping: London, UK, 2022. [Google Scholar]
- Korean Register of Shipping. Guidance for Autonomous Ships; Korean Register of Shipping: Busan, Republic of Korea, 2022. [Google Scholar]
- Russian Maritime Register of Shipping. Regulations for Classification of Maritime Autonomous and Remotely Controlled Surface Ships; Russian Maritime Register of Shipping: St. Petersburg, Russia, 2020. [Google Scholar]
- ClassNK. Guidelines for Automated/Autonomous Operation on ships (Ver.1.0); Nippon Kaiji Kyokai: Tokyo, Japan, 2020. [Google Scholar]
- Wróbel, K.; Montewka, J.; Kujala, P. System-theoretic approach to safety of remotely-controlled merchant vessel. Ocean. Eng. 2018, 152, 334–345. [Google Scholar] [CrossRef]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the development of a system-theoretic model for safety assessment of autonomous merchant vessels. Reliab. Eng. Syst. Saf. 2018, 178, 209–224. [Google Scholar] [CrossRef]
- Valdez Banda, O.A.; Kannos, S.; Goerlandt, F.; van Gelder, P.H.A.J.M.; Bergström, M.; Kujala, P. A systemic hazard analysis and management process for the concept design phase of an autonomous vessel. Reliab. Eng. Syst. Saf. 2019, 191, 106584. [Google Scholar] [CrossRef]
- Johansen, T.; Blindheim, S.; Torben, T.R.; Utne, I.B.; Johansen, T.A.; Sørensen, A.J. Development and testing of a risk-based control system for autonomous ships. Reliab. Eng. Syst. Saf. 2023, 234, 109195. [Google Scholar] [CrossRef]
- Basnet, S.; BahooToroody, A.; Chaal, M.; Lahtinen, J.; Bolbot, V.; Banda, O.A.V. Risk analysis methodology using STPA-based Bayesian network- applied to remote pilotage operation. Ocean Eng. 2023, 270, 113569. [Google Scholar] [CrossRef]
- Carreras Guzman, N.H.; Zhang, J.; Xie, J.; Glomsrud, J.A. A comparative study of STPA-Extension and the UFoI-E method for safety and security co-analysis. Reliab. Eng. Syst. Saf. 2021, 211, 107633. [Google Scholar] [CrossRef]
- Zhang, D.; Han, Z.P.; Zhang, K.; Zhang, J.F.; Zhang, M.Y.; Zhang, F. Use of hybrid causal logic method for preliminary hazard analysis of maritime autonomous surface ships. J. Mar. Sci. Eng. 2022, 10, 725. [Google Scholar] [CrossRef]
- Tusher, H.M.; Munim, Z.H.; Notteboom, T.E.; Kim, T.-E.; Nazir, S. Cyber security risk assessment in autonomous shipping. Marit. Econ. Logist. 2022, 24, 208–227. [Google Scholar] [CrossRef]
- Zhang, W.J.; Zhang, Y.J. Navigation risk assessment of autonomous ships based on Entropy-TOPSIS-Coupling Coordination Model. J. Mar. Sci. Eng. 2023, 11, 422. [Google Scholar] [CrossRef]
- Kretschmann, L.; Rødseth, Ø.; Fuller, B.S.; Noble, H.; Horahan, J.; McDowell, H. D9.3: Quantitative Assessment Maritime Unmanned Navigation through Intelligence in Networks; European Commissions: Hamburg, Germany, 2015. [Google Scholar]
- Kretschmann, L.; Rødseth, Ø.; Tjora, Å.; Fuller, B.S.; Noble, H.; Horahan, J. D9.2: Qualitative Assessment Maritime Unmanned Navigation through Intelligence in Networks; European Commissions: Hamburg, Germany, 2015. [Google Scholar]
- Thieme, C.A.; Utne, I.B.; Haugen, S. Assessing ship risk model applicability to Marine Autonomous Surface Ships. Ocean Eng. 2018, 165, 140–154. [Google Scholar] [CrossRef]
- Zhou, X.Y.; Liu, Z.J.; Wang, F.W. Towards applicability evaluation of hazard analysis methods for autonomous ships. Ocean Eng. 2020, 214, 107773. [Google Scholar] [CrossRef]
- Thieme, C.A.; Mosleh, A.; Utne, I.B.; Hegde, J. Incorporating software failure in risk analysis––Part 2: Risk modeling process and case study. Reliab. Eng. Syst. Saf. 2020, 198, 106804. [Google Scholar] [CrossRef]
- Chang, C.-H.; Kontovas, C.; Yu, Q.; Yang, Z. Risk assessment of the operations of maritime autonomous surface ships. Reliab. Eng. Syst. Saf. 2021, 207, 107324. [Google Scholar] [CrossRef]
- Yang, R.C.; Utne, I.B. Towards an online risk model for autonomous marine systems (AMS). Ocean Eng. 2022, 251, 111100. [Google Scholar] [CrossRef]
- AIID. AI Incident Database. Available online: https://incidentdatabase.ai/ (accessed on 11 September 2023).
- National Transportation Safety Board. Accident Report-Collision Between Volvo XC90 and Pedestrian; National Transportation Safety Board: Washington, DC, USA, 2019. [Google Scholar]
- National Transportation Safety Board. Rear-End Collision Between a Car Operating with Advanced Driver Assistance Systems and a Stationary Fire Truck; National Transportation Safety Board: Washington, DC, USA, 2018. [Google Scholar]
- Chaal, M.; Ren, X.; BahooToroody, A.; Basnet, S.; Bolbot, V.; Banda, O.A.V.; Gelder, P.V. Research on risk, safety, and reliability of autonomous ships: A bibliometric review. Saf. Sci. 2023, 167, 106256. [Google Scholar] [CrossRef]
- IEC60812; Failure Modes and Effects Analysis (FMEA and FMECA). International Electrotechnical Commission: Geneva, Switzerland, 2018; p. 170.
- Leveson, N.; Thomas, J. STPA Handbook; The MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Pearl, J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference; Morgan Kaufmann: Cambridge, MA, USA, 1988. [Google Scholar]
- Neapolitan, R.E. Learning Bayesian Networks; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2004; Volume 38. [Google Scholar]
- Heckerman, D. A Tutorial on Learning with Bayesian Networks. Available online: https://arxiv.org/ (accessed on 9 October 2023).
- Xu, S.; Kim, E.; Haugen, S.; Zhang, M. A Bayesian network risk model for predicting ship besetting in ice during convoy operations along the Northern Sea Route. Reliab. Eng. Syst. Saf. 2022, 223, 108475. [Google Scholar] [CrossRef]
- Kayiran, B.; Yazir, D.; Aslan, B. Data-driven Bayesian network approach to maritime accidents involved by dry bulk carriers in Turkish search and rescue areas. Reg. Stud. Mar. Sci. 2023, 67, 103193. [Google Scholar] [CrossRef]
- Khan, B.; Khan, F.; Veitch, B. A Dynamic Bayesian Network model for ship-ice collision risk in the Arctic waters. Saf. Sci. 2020, 130, 104858. [Google Scholar] [CrossRef]
- Kabir, S.; Papadopoulos, Y. Applications of Bayesian networks and Petri nets in safety, reliability, and risk assessments: A review. Saf. Sci. 2019, 115, 154–175. [Google Scholar] [CrossRef]
- Baksh, A.; Abbassi, R.; Garaniya, V.; Khan, F. Marine transportation risk assessment using Bayesian Network: Application to Arctic waters. Ocean. Eng. 2018, 159, 422–436. [Google Scholar] [CrossRef]
- Chen, C.; Liu, X.; Chen, H.H.; Li, M.; Zhao, L. A Rear-End Collision Risk Evaluation and Control Scheme Using a Bayesian Network Model. IEEE Trans. Intell. Transp. Syst. 2019, 20, 264–284. [Google Scholar] [CrossRef]
- Han, Z.; Zhang, D.; Fan, L.; Zhang, J.; Zhang, M. A Dynamic Bayesian Network model to evaluate the availability of machinery systems in Maritime Autonomous Surface Ships. Accid. Anal. Prev. 2024, 194, 107342. [Google Scholar] [CrossRef] [PubMed]
- BahooToroody, A.; Abaei, M.M.; Valdez Banda, O.; Montewka, J.; Kujala, P. On reliability assessment of ship machinery system in different autonomy degree; A Bayesian-based approach. Ocean. Eng. 2022, 254, 111252. [Google Scholar] [CrossRef]
- Guo, C.; Utne, I.B. Development of risk indicators for losing navigational control of autonomous ships. Ocean Eng. 2022, 266, 113204. [Google Scholar] [CrossRef]
- Fan, S.Q.; Zhang, J.F.; Blanco-Davis, E.; Yang, Z.L.; Yan, X.P. Maritime accident prevention strategy formulation from a human factor perspective using Bayesian Networks and TOPSIS. Ocean Eng. 2020, 210, 107544. [Google Scholar] [CrossRef]
- Zhang, J.F.; Teixeira, A.P.; Soares, C.G.; Yan, X.P.; Liu, K.Z. Maritime transportation risk assessment of Tianjin Port with Bayesian Belief networks. Risk Anal. 2016, 36, 1171–1187. [Google Scholar] [CrossRef]
- Qiao, W.; Huang, E.; Guo, H.; Lian, C.; Chen, H.; Ma, X. On the causation analysis for hazards involved in the engine room fire-fighting system by integrating STPA and BN. Ocean Eng. 2023, 288, 116073. [Google Scholar] [CrossRef]
- Jensen, F.V.; Jensen, F.V. Causal and Bayesian networks. In Bayesian Networks and Decision Graphs; Springer: New York, NY, USA, 2001; pp. 3–34. [Google Scholar]
- Khakzad, N.; Khan, F.; Amyotte, P. Safety analysis in process facilities: Comparison of fault tree and Bayesian network approaches. Reliab. Eng. Syst. Saf. 2011, 96, 925–932. [Google Scholar] [CrossRef]
- ISO 26262-2:2018(E); Road Vehicles—Functional Safety—Part 2: Management of Functional Safety. 2nd ed. ISO: Geneva, Switzerland, 2018.
- Sulaman, S.M.; Beer, A.; Felderer, M.; Höst, M. Comparison of the FMEA and STPA safety analysis methods–a case study. Softw. Qual. J. 2019, 27, 349–387. [Google Scholar] [CrossRef]
- Sullivan, K.J.; Griswold, W.G.; Cai, Y.; Hallen, B. The structure and value of modularity in software design. SIGSOFT Softw. Eng. Notes 2001, 26, 99–108. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Öztürk, Ü.; Akdağ, M.; Ayabakan, T. A review of path planning algorithms in maritime autonomous surface ships: Navigation safety perspective. Ocean. Eng. 2022, 251, 111010. [Google Scholar] [CrossRef]
- Lou, M.M.; Yang, X.F.; Xiang, Z.R.; Wang, Q.; Hu, J.B. Dynamic route planning method based on deep reinforcement learning and velocity obstacle. In Proceedings of the IEEE 12th DDCLS, Xiangtan, China, 12–14 May 2023; pp. 627–632. [Google Scholar]
- Yu, H.; Fang, Z.; Fu, X.; Liu, J.; Chen, J. Literature review on emission control-based ship voyage optimization. Transp. Res. Part D Transp. Environ. 2021, 93, 102768. [Google Scholar] [CrossRef]
- Hu, S.N.; Tian, S.P.; Zhao, J.S.; Shen, R.Q. Path planning of an unmanned surface vessel based on the improved A-Star and dynamic window method. J. Mar. Sci. Eng. 2023, 11, 1060. [Google Scholar] [CrossRef]
- Hinostroza, M.A.; Lekkas, A.M. A rudimentarymission planning system for marine autonomous surface ships. IFAC-Pap 2022, 55, 196–203. [Google Scholar]
- Hagen, I.B.; Kufoalor, D.K.M.; Brekke, E.F.; Johansen, T.A. MPC-based collision avoidance strategy for existing marine vessel guidance systems. In Proceedings of the ICRA, Brisbane, Australia, 21–25 May 2018; pp. 7618–7623. [Google Scholar]
- Sarhadi, P.; Naeem, W.; Athanasopoulos, N. A survey of recent machine learning solutions for ship collision avoidance and mission planning. In Proceedings of the 14th IFAC CAMS, Kongens Lyngby, Denmark, 14–16 September 2022; pp. 257–268. [Google Scholar]
- Thombre, S.; Zhao, Z.; Ramm-Schmidt, H.; García, J.M.V.; Malkamäki, T.; Nikolskiy, S.; Hammarberg, T.; Nuortie, H.; Bhuiyan, M.Z.H.; Särkkä, S.; et al. Sensors and AI techniques for situational awareness in autonomous ships: A review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 64–83. [Google Scholar] [CrossRef]
- Zou, Z.X.; Chen, K.Y.; Shi, Z.W.; Guo, Y.H.; Ye, J.P. Object detection in 20 years: A survey. Proc. IEEE 2023, 111, 257–276. [Google Scholar] [CrossRef]
- Yoo, Y.; Lee, J.-S. Evaluation of ship collision risk assessments using environmental stress and collision risk models. Ocean. Eng. 2019, 191, 106527. [Google Scholar] [CrossRef]
- Elkins, L.; Sellers, D.; Monach, W.R. The Autonomous Maritime Navigation (AMN) project: Field tests, autonomous and cooperative behaviors, data fusion, sensors, and vehicles. J. Field Rob. 2010, 27, 790–818. [Google Scholar] [CrossRef]
- Lu, Y.; Xi, Z.; Lien, J.M. Conservative Collision Prediction among Polygons with Unknown Motion; Technical ReportG-MU-CS-TR-2013-4; George Mason University: Fairfax, VA, USA, 2013. [Google Scholar]
- Lin, J.F.; Han, Y.; Guo, C.Y.; Su, Y.M.; Zhong, R.F. Intelligent ship anti-rolling control system based on a deep deterministic policy gradient algorithm and the Magnus effect. Phys. Fluids 2022, 34, 057102. [Google Scholar] [CrossRef]
- Fang, W.; Ming, L.; Feng, X. Design and implementation of a triple-redundant dynamic positioning control system for deepwater drilling rigs. Appl. Ocean Res. 2016, 57, 140–151. [Google Scholar]
- Wang, L.; Wu, Q.; Liu, J.L.; Li, S.J.; Negenborn, R.R. State-of-the-art research on motion control of maritime autonomous surface ships. J. Mar. Sci. Eng. 2019, 7, 438. [Google Scholar] [CrossRef]
- Neufelder, A.M. Effective Application of Software Failure Modes Effects Analysis; Quanterion Solutions, Incorporated: Utica, NY, USA, 2017. [Google Scholar]
- Wang, B.; Ng, P.H.; Elhadidi, B.M.N.A.K.; Ang, H.S.; Moon, S.K. Failure analysis and finite element simulation for structural systems in an unmanned aerial vehicle. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 24–27 June 2019; pp. 636–640. [Google Scholar]
- Ando, H. Development and Demonstration of Autonomous Ships in Japan; IMO: New York, NY, USA, 2022. [Google Scholar]
- Brekke, E.F.; Wilthil, E.F.; Eriksen, B.O.H.; Kufoalor, D.K.M.; Helgesen, Ø.K.; Hagen, I.B.; Breivik, M.; Johansen, T.A. The Autosea project: Developing closed-loop target tracking and collision avoidance systems. J. Phys. Conf. Ser. 2019, 1357, 012020. [Google Scholar] [CrossRef]
- Serban, A.C.; Poll, E.; Visser, J. A standard driven software architecture for fully autonomous vehicles. In Proceedings of the IEEE ICSA-C, Seattle, DC, USA, 30 April–4 May 2018; pp. 120–127. [Google Scholar]
- Veitch, E.; Andreas Alsos, O. A systematic review of human-AI interaction in autonomous ship systems. Saf. Sci. 2022, 152, 105778. [Google Scholar] [CrossRef]
- Chaal, M.; Bahootoroody, A.; Basnet, S.; Valdez Banda, O.A.; Goerlandt, F. Towards system-theoretic risk assessment for future ships: A framework for selecting risk control options. Ocean Eng. 2022, 259, 111797. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Module | Sub-Module | Description | Ref. |
|---|---|---|---|---|
| Guidance Module | Path planning | Route planning | The task of route planning is to plan a collision-free route from the starting point to the target point. | [57] |
| Route optimization | For route optimization, different route alternatives are compared in the process of identifying the route that meets the optimization goals. | [58] | ||
| Motion planning | Local path planning/re-planning | Dynamic (online) adjustment or re-planning of intermediate waypoints during path tracking of pre-planned routes. | [59] | |
| Collision risk analysis | By establishing an effective and systematic model to monitor parameter status, collision risk can be continuously evaluated, which can serve as the basis for collision prevention models and provide input for navigation safety and autonomous navigation. | [60] | ||
| Collision avoidance | Ability to modify planned paths or trajectories to avoid dynamic obstacles and make safe and reliable decisions in dangerous situations. | [61,62] | ||
| Navigation Module | Sensor fusion | State estimation (position, speed, etc.) | Obtaining own ship’s state information, including position, speed, etc. | [56] |
| Ship attitude estimation | Obtaining own ship’s attitude information. | [56] | ||
| Obstacle detection | Detect and classify obstacles within the range of ship sensors and can be used in conjunction with cameras, AIS, LiDAR, and sound sensors in terms of type, position, speed, heading, etc. | [63,64] | ||
| Environmental stress evaluation | Evaluation based on the maneuvering environment and traffic environment, etc. | [65] | ||
| Observer | Data processing (data fusion) | Process data obtained from cameras, AIS, radar, LiDAR, AIS, GPS, etc., and attempt to average the redundant and possibly conflicting data with their inherent errors to construct a best-perceived truth of the environment. | [63,66] | |
| Collision prediction | Predicting obstacle collisions with unknown trajectories. | [67] | ||
| Control Module | Stabilization control | Anti-rolling control | Ship anti-rolling control achieves a wide range of ship speeds and efficient anti-rolling capabilities. In particular, effectively reducing the rolling motions of ships to improve their seakeeping performance. | [68] |
| Dynamic positioning (DP) control | The DP system enables ships to maintain their position and advance solely through thrusters in the presence of wind, current, and wave interference. | [69] | ||
| Regulation control | Course control | When the ship needs to avoid other ships or obstacles while sailing on a predetermined route, or navigating within a limited channel, it is necessary to change the speed and course in time, which is the ship course mobility. | [70] | |
| Speed control | Speed control is mainly to control the rotation speed of the propeller, which can be adjusted arbitrarily in a certain range. | [70] | ||
| Path-following | Path-following is geometric position tracking without considering time. | [70] | ||
| Trajectory tracking | In addition to following the path, trajectory tracking requires the system to arrive at a specified location at a specified time. | [70] |
| Level | Likelihood of Occurrence | Affected Software Design | Past History | Domain Expertise |
|---|---|---|---|---|
| 3 | High | Very complex or problematic | Has happened in every past system or is known to be present | No experience with this feature or product |
| 2 | Moderate | Average complexity | Has happened at least once in the past | Some experience with this feature or product |
| 1 | Low | Very simple, not problematic | Has not happened in the past and there is no reason to believe it will happen on this system | Significant experience with this feature or product |
| Level | Severity | Severity Level Description |
|---|---|---|
| 5 | Very high | A failure that may cause system loss. |
| 4 | High | A failure that may cause major system damage resulting in loss of the mission. |
| 3 | Moderate | A failure that may cause minor system damage resulting in a delay, loss of availability, or mission degradation. |
| 2 | Low | A failure that is not serious enough to cause system damage but will result in unscheduled maintenance. |
| 1 | Very low | No impact on the system. |
| Level | Likelihood | Detection Level Description |
|---|---|---|
| 5 | Improbable | The failure mode cannot be reproduced in a development or test environment. |
| 4 | Low probability | The failure model is visible and detectable only with fault injection. |
| 3 | Moderate probability | The failure mode is visible and detectable with off-nominal testing. |
| 2 | High probability | The failure mode is visible and detectable with requirements-based testing. |
| 1 | Almost certain | The failure mode is visible and detectable under any set of conditions. |
| No. | Failure Mode | Local Effect | Failure Effect | Detection Method/Existing Controls | Failure Cause | S | O | D | RPN |
|---|---|---|---|---|---|---|---|---|---|
| 1 | False negative (Missed detection) | Missed obstacles in immediate vicinity | Obstacles enter safety domain unnoticed | Regular calibration of sensors Algorithm testing in varied conditions in the simulations Sensitivity adjustment Generation of sufficient test cases which reflect environmental characteristics | Sensor malfunction Inadequate sensor range Poor sensitivity of the algorithm Low visibility due to fog or heavy rain, etc. Confusion with textured background | 4 | 2 | 2 | 16 |
| 2 | False positive (False detection) | Unnecessary navigational adjustments | Reduced operational efficiency Increased risk of inappropriate manoeuvres | Enhance accuracy of data fusion algorithms to corroborate multiple sensors and data sources Generation of sufficient test cases which reflect environmental characteristics | Sensor noises Misinterpretation of environmental features (e.g., waves, reflections, birds, etc) as obstacles Over-sensitive algorithm Confusion with textured background | 1 | 2 | 2 | 4 |
| 3 | Incorrect classification | Erroneous identification of the type or size of an obstacle | Increased probability of obstacles enters safety domain Inappropriate navigational responses | Increase diversity of training dataset Algorithm testing in varied conditions in the simulations Generation of sufficient test cases which reflect environmental characteristics | Limited training data diversity Inability of the algorithm to distinguish between different object types or judge sizes | 4 | 3 | 2 | 24 |
| 4 | Latency issues | Delayed response to detected obstacles | Obstacles enter safety domain without notice Reduced time for decision-making and action | Optimization of algorithms Upgrading hardware if latency issue is too severe | Processing delays Inefficient algorithm design Hardware constraints | 2 | 3 | 2 | 12 |
| 5 | Instable algorithm | Inconsistent obstacle detection | Unpredictable system reliability Increased need for manual intervention | Comprehensive software testing Regular updates and maintenance of sensors | Software bugs Fluctuating sensor performance Fast-changing environmental conditions | 2 | 3 | 1 | 6 |
| 6 | Degraded performance in adverse conditions | Reduced detection effectiveness in specific conditions | Lowered system reliability in diverse environment | Implementation of adaptive algorithms Simulation testing in various environmental conditions | Poor visibility Extreme weather High sea clutter | 2 | 3 | 2 | 12 |
| 7 | Inadequate coverage | Missed detections in certain areas | Obstacles enter safety domain unnoticed | Strategic placement of sensors, and regular adjustment in case of misplacement Test for algorithm’s coverage | Sensor blind spots Limited scope of algorithms | 3 | 2 | 3 | 18 |
| ID | System-Level Safety Constraints | System-Level Hazards |
|---|---|---|
| SC1 | Ensure a safe distance is maintained from other vessels. | H1 |
| SC2 | In the event of another vessel entering the safety domain, predict its trajectory, replan the plan, and execute collision avoidance actions. | H1 |
| SC3 | Keep a safe distance from static obstacles like islands and oil platforms. | H2 |
| SC4 | Should a static obstacle enter the safety zone, replan the path, and undertake collision avoidance actions. | H2 |
| Control Action | Type of UCA | UCAs | Loss Scenarios | Causal Factors |
|---|---|---|---|---|
| Obstacle information | Not provided | UCA-1: ODM does not provide obstacle information when the obstacle is in the immediate vicinity. | LS-1: ODM does not receive processed operational data. |
|
| LS-2: ODM receives but does not handle the processed operational data. |
| |||
| LS-3: ODM receives the processed operational data, and ODM handled the data but does not provide output. |
| |||
| Provide | UCA-2: ODM provides information indicating there is an obstacle in immediate vicinity when there actually is not. | LS-4: The processed operational data received from DPM are wrong. |
| |
| LS-5: The processed operational data are provided, but the ODM algorithm is wrong. |
| |||
| LS-6: The obstacle detection and classification algorithm are implemented correctly, but the output is wrong. |
| |||
| UCA-3: ODM provides obstacle information, but the information is wrong after obstacle detection (e.g., wrong type of obstacles). | LS-7: The processed operational data received from DPM are wrong. |
| ||
| LS-8: The processed operational data are provided, but the classification algorithm is wrong. |
| |||
| LS-9: The obstacle detection and classification algorithm are implemented correctly, but the output is wrong. |
| |||
| UCA-4: ODM provides obstacle information, but the information is incomplete after an obstacle is detected. | LS-10: The processed operational data received from DPM are incomplete. |
| ||
| LS-11: The processed operational data received from DPM are complete, but the ODM algorithm is wrong. |
| |||
| LS-12: The ODM algorithm is correct, but the provided output is incomplete. |
| |||
| Obstacle information | Provide | UCA-5: ODM provides obstacle information, but the data are inconsistent, where an object might be detected in one instance and missed in another. | LS-13: The processed operational data received from DPM are inconsistent. |
|
| LS-14: The operational data received from DPM are consistent, but the ODM algorithm is wrong. |
| |||
| LS-15: The ODM algorithm is correct, but the provided output is inconsistent. |
| |||
| Too early, too late, out of order | UCA-6: ODM sends out obstacle information too late. | LS-16: The processed operational data are received from DPM too late. |
| |
| LS-17: The operational data received from DPM are timely, but the ODM algorithm processing time is too long. |
| |||
| LS-18: The ODM algorithm is correct, but the output is provided too late. |
| |||
| Stop too soon, applied too long | UCA-7: ODM provides obstacle information for too long a time without updating upon new obstacles entering into view. | LS-19: The operational data received from DPM are not updated. |
| |
| LS-20: The operational data received form DPM are updated, but the buffer for ODM processing is not refreshed. |
| |||
| LS-21: The ODM algorithm provides updated obstacle information, but the buffer for output is not refreshed. |
|
| Type | Nodes | States | Type | Nodes | States |
|---|---|---|---|---|---|
| Loss | L-1: Causality or injury of seafarers onboard | Yes/No | Loss | L-2: Loss or damage of the ship | Yes/No |
| Loss | L-3: Damage to environment | Yes/No | Failure Effect /Hazard | FE-1/FE-4/FE-6/FE-11/H-1/H-2: Obstacles enter safety domain | Yes/No |
| Failure Effect | FE-2: Reduced operational efficiency | Yes/No | Failure Effect | FE-3: Increased risk of inappropriate manoeuvres | Yes/No |
| Failure Effect | FE-5: Inappropriate navigation-al responses | Yes/No | Failure Effect | FE-7: Reduced time for decision-making and action | Yes/No |
| Failure Effect | FE-8: Unpredictable system reliability | Yes/No | Failure Effect | FE-9: Increased need for manual intervention | Yes/No |
| Failure Effect | FE-10: Lowered system reliability in diverse environments | Yes/No | Failure Mode /UCA | FM-1/UCA-1/UCA-5: ODM misses detections when obstacles are in the immediate vicinity | Yes/No |
| Failure Mode /UCA | FM-2/FM-3/UCA-2/UCA-3: ODM falsely detects obstacles when they are in the immediate vicinity | Yes/No | Failure Mode /UCA | FM-4/UCA-6: ODM provides required obstacle information too late while an obstacle has entered the safety domain already | Yes/No |
| Failure Mode | FM-5: Instable algorithm | Yes/No | Failure Mode | FM-6: Degraded performance in adverse conditions | Yes/No |
| Failure Mode | FM-7: Inadequate coverage | Yes/No | UCA | UCA-4: ODM provides obstacle information, but the information is incomplete after an obstacle is detected | Incomplete/Complete |
| UCA | UCA-7: ODM provides obstacle information for too short a time before the updates such that DPM does not have enough time to recognize the obstacle | Too short/Normal | Loss Scenario | LS-16: The processed operational data are received from DPM too late | Too late/Normal |
| Loss Scenario | LS-17: The operational data received from DPM are timely, but ODM algorithm processing time is too long | Too long/Normal | Loss Scenario | LS-18: The ODM algorithm is correct, but the output is provided too late | Too late/Normal |
| Loss Scenario | LS-19: The operational data received from DPM are not updated | Updated/Not updated | Loss Scenario | LS-20: The operational data received form DPM are updated, but the buffer for ODM processing is not refreshed | Not refreshed/Refreshed |
| Loss Scenario | LS-21: The ODM algorithm provides updated obstacle information, but the buffer for output is not refreshed | Not refreshed/Refreshed | Detection Method | DM-1: Comprehensive software testing | Not exist/ Exist |
| Detection Method | DM-2: Simulation testing in various environmental conditions | Not exist/Exist | Detection Method | DM-3: Test for the algorithm’s coverage | Not exist/ Exist |
| Existing Control | EC-1: Optimization of algorithms | Not exist/Exist | Existing Control | EC-2: Upgrading hardware if latency issue is too severe | Not exist/ Exist |
| Existing Control | EC-3: Regular updates and maintenance of sensors | Not exist/Exist | Existing Control | EC-4: Implementation of adaptive algorithms | Not exist/ Exist |
| Existing Control | EC-5: Strategic placement of sensors, and regular adjustment in case of misplacement | Not exist/Exist | Failure Cause/ Causal factor | FC/CF: Algorithm design | Inappropriate/Appropriate |
| Failure Cause& Causal Factor | FC/CF: Sensor performance | Bad/Good | Failure Cause | FC: Software bugs | Bugs/No bugs |
| Failure Cause | FC: Fast-changing environmental conditions | Fast/Normal | Failure Cause | FC: Poor visibility | Poor/Normal |
| Failure Cause | FC: High sea clutter | High/Normal | Failure Cause | FC: Extreme weather | Extreme/Normal |
| Failure Cause | FC: Processing delays | Delay/Normal | Failure Cause | FC: Hardware constraints | Constraints/No constraints |
| Failure Cause | FC: Hardware constraints | Constraints/No constraints | Causal factor | CF: Algorithm processing time | Too long/Normal |
| Causal factor | CF: Programming | Incorrect/Correct |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Zhu, Y.; Zhou, T.; Xu, S.; Zhang, W.; Zhou, X.; Meng, X. Integrating Software FMEA and STPA to Develop a Bayesian Network-Based Software Risk Model for Autonomous Ships. J. Mar. Sci. Eng. 2024, 12, 4. https://doi.org/10.3390/jmse12010004
Yang X, Zhu Y, Zhou T, Xu S, Zhang W, Zhou X, Meng X. Integrating Software FMEA and STPA to Develop a Bayesian Network-Based Software Risk Model for Autonomous Ships. Journal of Marine Science and Engineering. 2024; 12(1):4. https://doi.org/10.3390/jmse12010004
Chicago/Turabian StyleYang, Xue, Yawei Zhu, Tao Zhou, Sheng Xu, Wenjun Zhang, Xiangyu Zhou, and Xiangkun Meng. 2024. "Integrating Software FMEA and STPA to Develop a Bayesian Network-Based Software Risk Model for Autonomous Ships" Journal of Marine Science and Engineering 12, no. 1: 4. https://doi.org/10.3390/jmse12010004