
SPACNet: A Simulation Platform of an Acoustic Cognitive Network
 , and
, and
Abstract
:1. Introduction
- SPACNet was designed and investigated to support the simulations of UACNs in this study, which can promote the future development of UACNs in real-world applications;
- The design of SPACNet is introduced in detail, including the structure and function, a discrete-event management module, an integrated environment-driven UWA channel model, a peer-to-peer (P2P) node model, a state machine-based process model, and a multinode underwater acoustic communication (UAC) model;
- To improve the efficiency of the network simulation, a simplified collision model was established, and a method to reduce invalid calculations was adopted;
- The effectiveness of the cognitive assessment of the simulation platform was demonstrated by both a simulation experiment and a field test, and the results show that the behavior of protocols can be quantitatively evaluated in SPACNet.
2. Design of SPACNet
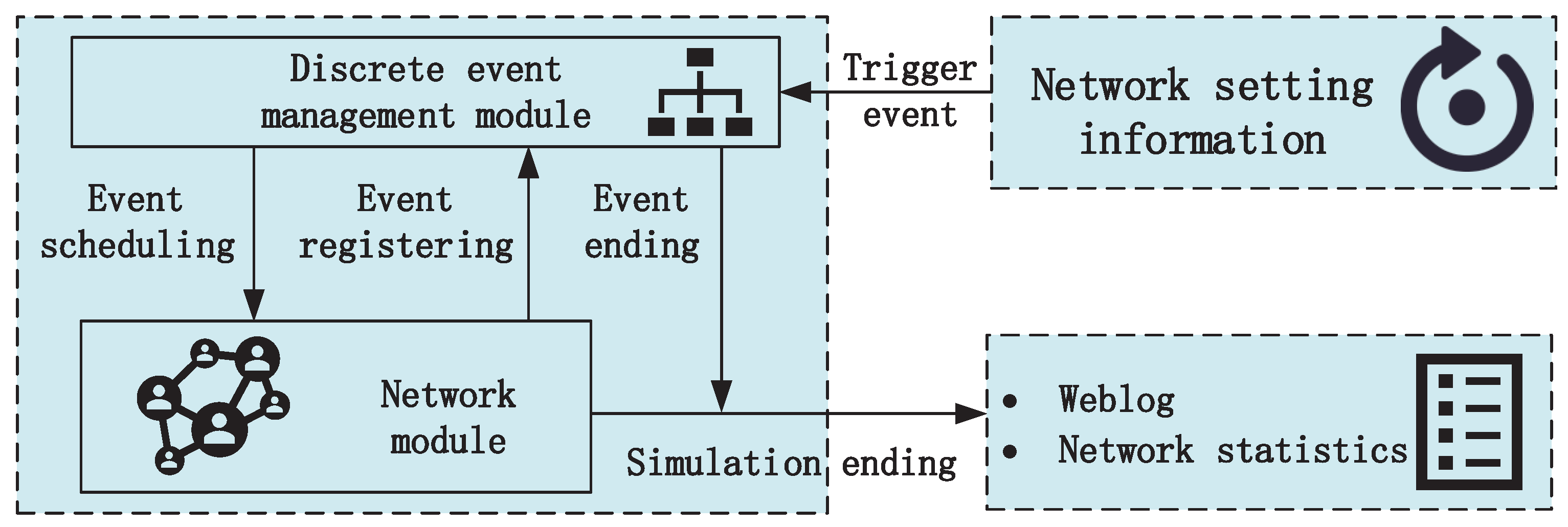
2.1. Discrete-Event Management Module
2.2. Integrated Environment-Driven UWA Channel Model
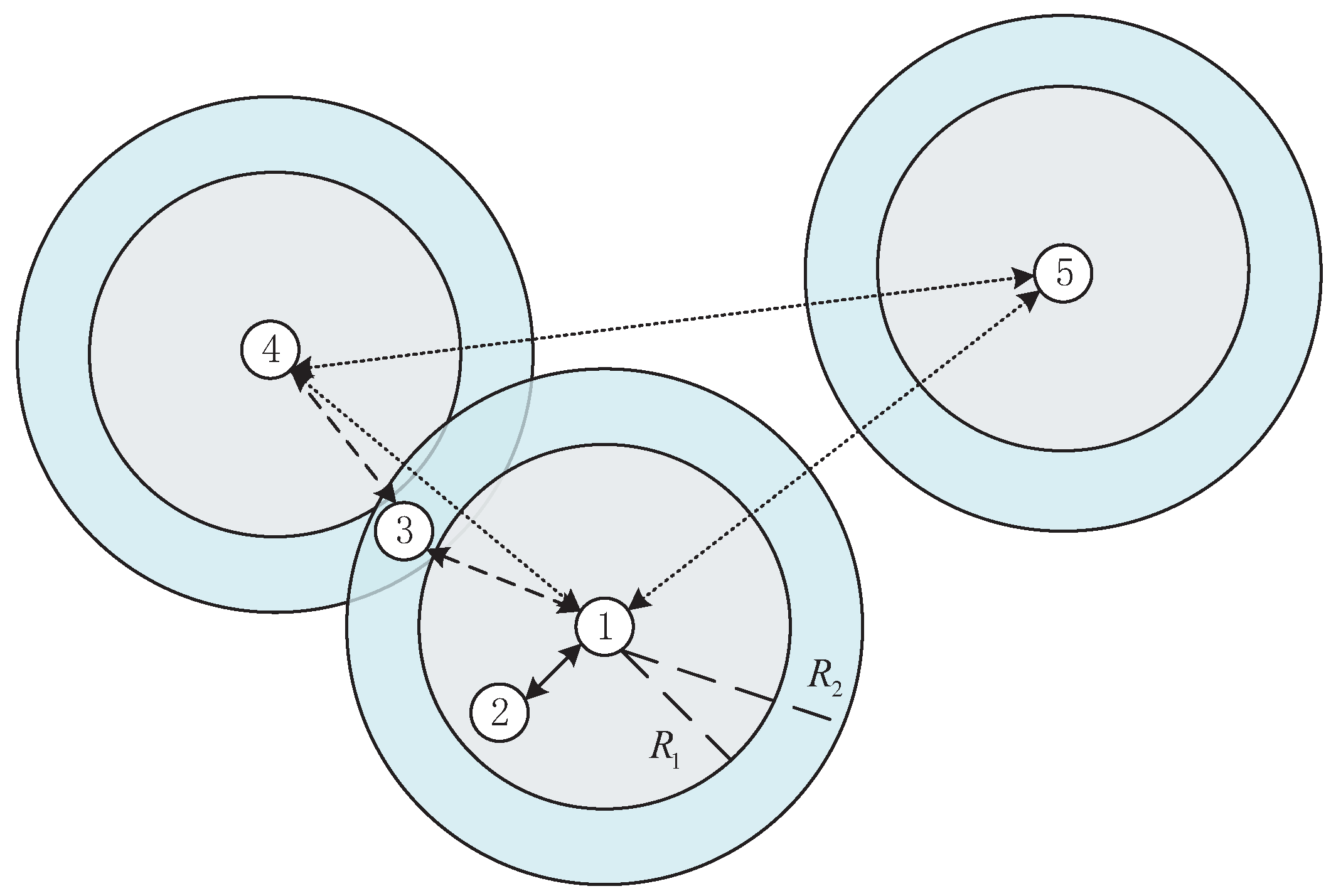
2.3. P2P Node Model
2.4. State Machine-Based Process Model
3. Multinode UAC Module
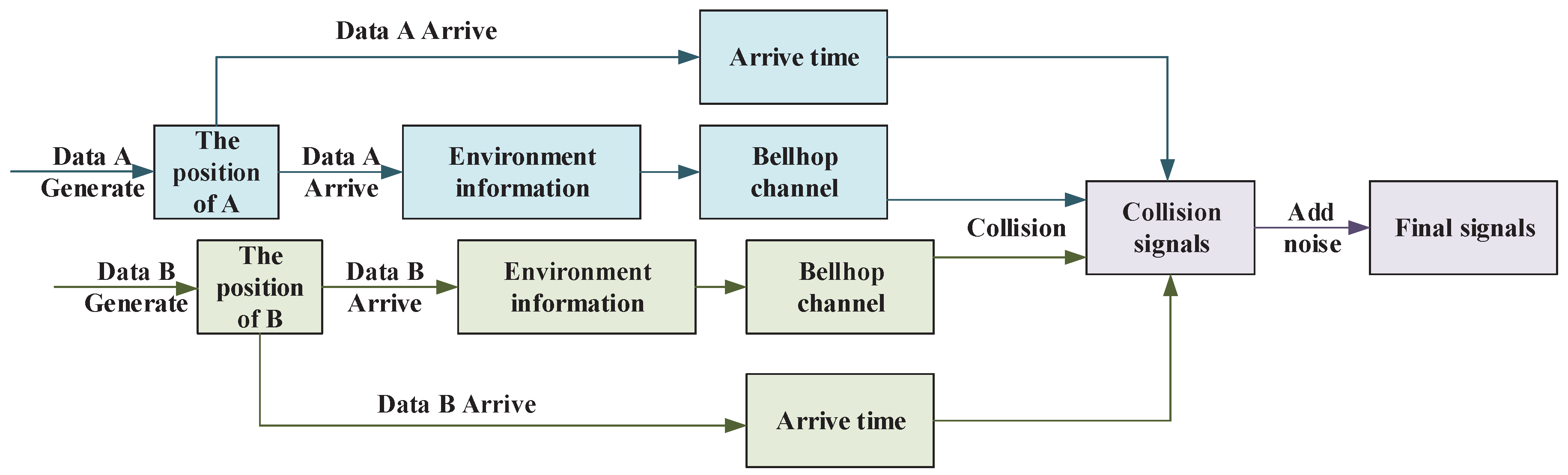
3.1. Collision Model
3.2. Simplified Collision Model
4. Simulation Experiment
4.1. Network Parameters Configuration
4.2. Simulation Process
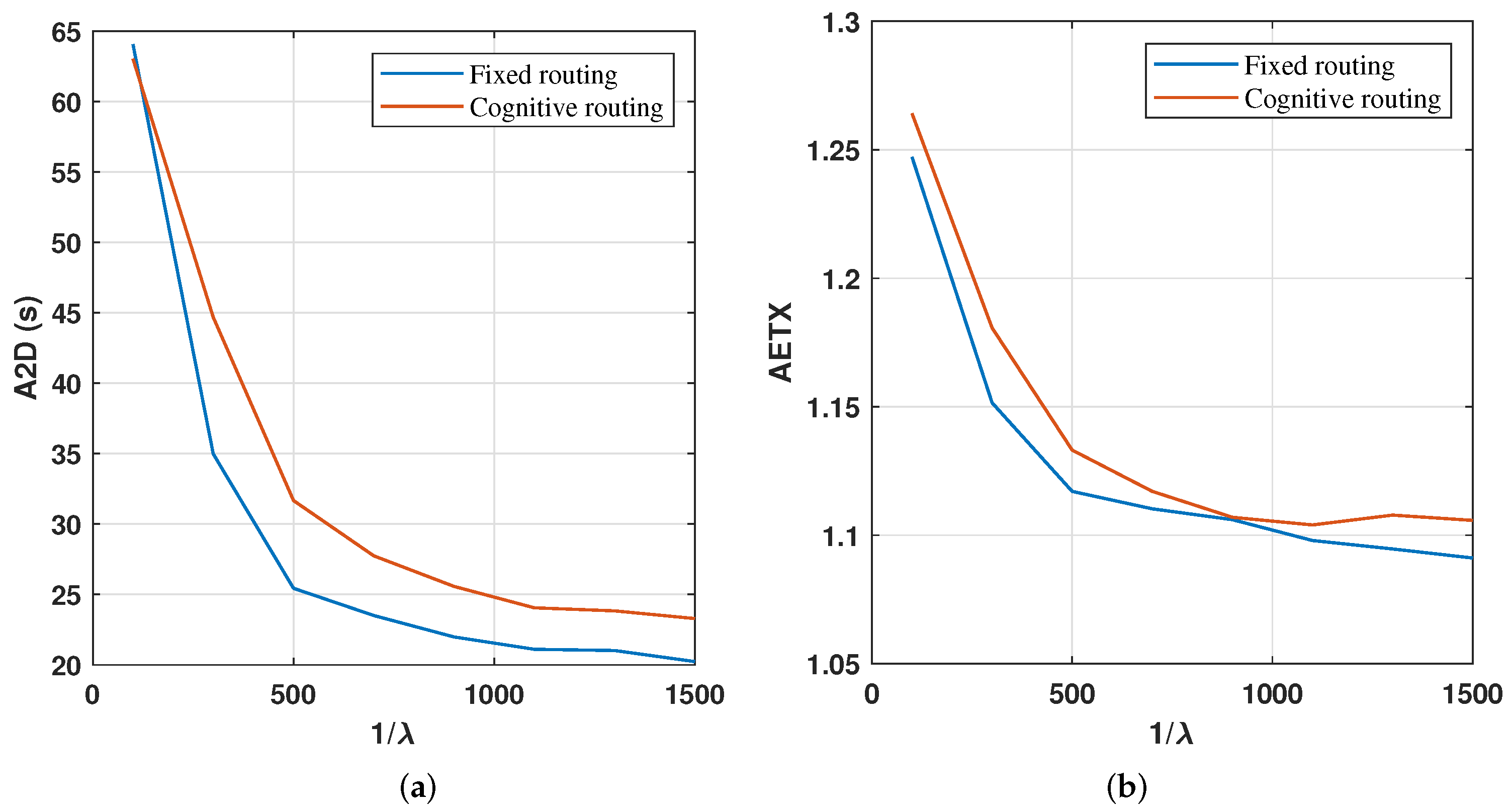
4.3. Results and Analysis
5. Field Experimental Validation
5.1. Network Configuration of the Field Experiment
5.2. Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, N.; Yao, N.; Gao, Z.; Lu, Z. Deep reinforcement learning based time-domain interference alignment scheduling for underwater acoustic networks. J. Mar. Sci. Eng. 2022, 10, 903. [Google Scholar] [CrossRef]
- Zhou, Y.; Tong, F.; Yang, X. Research on Co-Channel Interference Cancellation for Underwater Acoustic MIMO Communications. Remote Sens. 2022, 14, 5049. [Google Scholar] [CrossRef]
- Mohapatra, A.K.; Gautam, N.; Gibson, R.L. Combined routing and node replacement in energy-efficient underwater sensor networks for seismic monitoring. IEEE J. Ocean. Eng. 2012, 38, 80–90. [Google Scholar] [CrossRef]
- Yang, X.; Zhou, Y.; Wang, R.; Tong, F. Research and Implementation on a Real-time OSDM MODEM for Underwater Acoustic Communications. IEEE Sens. J. 2023, 23, 18434–18448. [Google Scholar] [CrossRef]
- Jiang, W.; Yang, X.; Tong, F.; Yang, Y.; Zhou, T. A low-complexity underwater acoustic coherent communication system for small AUV. Remote Sens. 2022, 14, 3405. [Google Scholar] [CrossRef]
- Zhou, Y.; Diamant, R. A parallel decoding approach for mitigating near–far interference in internet of underwater things. IEEE Internet Things J. 2020, 7, 9747–9759. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Li, Y.; Sadiq, M.; Liang, J.; Khan, M.A. Recent advances, future trends, applications and challenges of internet of underwater things (iout): A comprehensive review. J. Mar. Sci. Eng. 2023, 11, 124. [Google Scholar] [CrossRef]
- Apostolopoulos, P.A.; Tsiropoulou, E.E.; Papavassiliou, S. Cognitive data offloading in mobile edge computing for internet of things. IEEE Access 2020, 8, 55736–55749. [Google Scholar] [CrossRef]
- Firozjaei, H.M.; Moghaddam, J.Z.; Ardebilipour, M. A Virtual MIMO Communication for an UAV Enabled Cognitive Relay Network. IEEE Sens. J. 2023, 23, 20267–20274. [Google Scholar] [CrossRef]
- Xiao, H.; Wu, C.; Jiang, H.; Deng, L.P.; Luo, Y.; Zhang, Q.Y. Energy-Efficient Resource Allocation in Multiple UAVs-Assisted Energy Harvesting-Powered Two-Hop Cognitive Radio Network. IEEE Sens. J. 2023, 23, 7644–7655. [Google Scholar] [CrossRef]
- Li, Z.; Shi, J.; Wang, C.; Wang, D.; Li, X.; Liao, X. Intelligent covert communication design for cooperative cognitive radio network. China Commun. 2023, 20, 122–136. [Google Scholar] [CrossRef]
- Morozs, N.; Mitchell, P.D.; Diamant, R. Scalable adaptive networking for the internet of underwater things. IEEE Internet Things J. 2020, 7, 10023–10037. [Google Scholar] [CrossRef]
- Luo, Y.; Pu, L.; Mo, H.; Zhu, Y.; Peng, Z.; Cui, J.H. Receiver-initiated spectrum management for underwater cognitive acoustic network. IEEE Trans. Mob. Comput. 2016, 16, 198–212. [Google Scholar] [CrossRef]
- Li, X.; Sun, Y.; Guo, Y.; Fu, X.; Pan, M. Dolphins first: Dolphin-aware communications in multi-hop underwater cognitive acoustic networks. IEEE Trans. Wirel. Commun. 2016, 16, 2043–2056. [Google Scholar] [CrossRef]
- Chaudhary, R.; Sethi, S.; Keshari, R.; Goel, S. A study of comparison of Network Simulator-3 and Network Simulator-2. Int. J. Comput. Sci. Inf. Technol. 2012, 3, 3085–3092. [Google Scholar]
- Jiang, W.; Tong, F. Exploiting sparsity for underwater acoustic sensor network under time-varying channels. IEEE Internet Things J. 2021, 9, 2859–2869. [Google Scholar] [CrossRef]
- Bian, D.; Kuzlu, M.; Pipattanasomporn, M.; Rahman, S.; Wu, Y. Real-time co-simulation platform using OPAL-RT and OPNET for analyzing smart grid performance. In Proceedings of the 2015 IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; IEEE: New York, NY, USA, 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Xie, P.; Zhou, Z.; Peng, Z.; Yan, H.; Hu, T.; Cui, J.H.; Shi, Z.; Fei, Y.; Zhou, S. Aqua-Sim: An NS-2 based simulator for underwater sensor networks. In Proceedings of the OCEANS 2009, Bremen, Germany, 11–14 May 2009; IEEE: New York, NY, USA, 2009; pp. 1–7. [Google Scholar] [CrossRef]
- Martin, R.; Zhu, Y.; Pu, L.; Dou, F.; Peng, Z.; Cui, J.H.; Rajasekaran, S. Aqua-sim next generation: A NS-3 based simulator for underwater sensor networks. In Proceedings of the 10th International Conference on Underwater Networks & Systems, Arlington, VA, USA, 22–24 October 2015; pp. 1–2. [Google Scholar] [CrossRef]
- Zuba, M.; Jiang, Z.; Yang, T.; Su, Y.; Cui, J.H. An advanced channel framework for improved underwater acoustic network simulations. In Proceedings of the 2013 OCEANS, San Diego, CA, USA, 24–26 September 2013; IEEE: New York, NY, USA, 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Zuba, M.; Song, A.; Cui, J.H. Exploring parabolic equation models for improved underwater network simulations. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014; IEEE: New York, NY, USA, 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Masiero, R.; Azad, S.; Favaro, F.; Petrani, M.; Toso, G.; Guerra, F.; Casari, P.; Zorzi, M. DESERT Underwater: An NS-Miracle-based framework to DEsign, Simulate, Emulate and Realize Test-beds for Underwater network protocols. In Proceedings of the 2012 Oceans, Yeosu, Republic of Korea, 21–24 May 2012; IEEE: New York, NY, USA, 2012; pp. 1–10. [Google Scholar] [CrossRef]
- Campagnaro, F.; Francescon, R.; Guerra, F.; Favaro, F.; Casari, P.; Diamant, R.; Zorzi, M. The DESERT underwater framework v2: Improved capabilities and extension tools. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016; IEEE: New York, NY, USA, 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Petrioli, C.; Petroccia, R.; Potter, J.R.; Spaccini, D. The SUNSET framework for simulation, emulation and at-sea testing of underwater wireless sensor networks. Ad Hoc Netw. 2015, 34, 224–238. [Google Scholar] [CrossRef]
- Martins, R.; de Sousa, J.B.; Caldas, R.; Petrioli, C.; Potter, J. SUNRISE project: Porto university testbed. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014; IEEE: New York, NY, USA, 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Cruz, N.A.; Ferreira, B.M.; Kebkal, O.; Matos, A.C.; Petrioli, C.; Petroccia, R.; Spaccini, D. Investigation of underwater acoustic networking enabling the cooperative operation of multiple heterogeneous vehicles. Mar. Technol. Soc. J. 2013, 47, 43–58. [Google Scholar] [CrossRef]
- Petroccia, R.; Spaccini, D. A back-seat driver for remote control of experiments in underwater acoustic sensor networks. In Proceedings of the 2013 MTS/IEEE OCEANS, Bergen, Norway, 10–14 June 2013; IEEE: New York, NY, USA, 2013; pp. 1–9. [Google Scholar] [CrossRef]
- Zeng, X.; Luo, Z.; Chen, F.; Yu, H.; Ji, F.; Guang, Q. An ns-3 compatible emulation framework for underwater acoustic network. In Proceedings of the 13th International Conference on Underwater Networks & Systems, Shenzhen, China, 2–4 December 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Luo, H.; Wu, K.; Ruby, R.; Hong, F.; Guo, Z.; Ni, L.M. Simulation and experimentation platforms for underwater acoustic sensor networks: Advancements and challenges. ACM Comput. Surv. (CSUR) 2017, 50, 1–44. [Google Scholar] [CrossRef]
- Bai, W.G.; Wang, H.Y.; Zhao, R.Q. Modeling underwater time-varying acoustic channel using opnet. Appl. Mech. Mater. 2013, 263, 1178–1183. [Google Scholar] [CrossRef]
- Petroccia, R.; Spaccini, D. Comparing the SUNSET and DESERT frameworks for in field experiments in underwater acoustic networks. In Proceedings of the 2013 MTS/IEEE OCEANS, Bergen, Norway, 10–14 June 2013; IEEE: New York, NY, USA, 2013; pp. 1–10. [Google Scholar] [CrossRef]
- Casari, P.; Tapparello, C.; Guerra, F.; Favaro, F.; Calabrese, I.; Toso, G.; Azad, S.; Masiero, R.; Zorzi, M. Open source suites for underwater networking: WOSS and DESERT underwater. IEEE Netw. 2014, 28, 38–46. [Google Scholar] [CrossRef]
- Zhu, Y.; Le, S.; Pu, L.; Lu, X.; Peng, Z.; Cui, J.H.; Zuba, M. Aqua-Net Mate: A real-time virtual channel/modem simulator for Aqua-Net. In Proceedings of the 2013 MTS/IEEE OCEANS, Bergen, Norway, 10–14 June 2013; IEEE: New York, NY, USA, 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Yan, Z.; Jiang, H.; Li, B.; Yang, M. A Flowchart Based Finite State Machine Design and Implementation Method for FPGA. In Proceedings of the IoT as a Service: 6th EAI International Conference, IoTaaS 2020, Xi’an, China, 19–20 November 2020; Proceedings 6. Springer: Berlin/Heidelberg, Germany, 2021; pp. 295–310. [Google Scholar] [CrossRef]
- Lou, Y.; Ahmed, N. Underwater Communications and Networks; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of nodes | 21 |
| Number of sink nodes | 2 |
| Transducer directivity | Omnidirectional |
| Modulation system | Different Mary-DSSS |
| Node communication mode | Half-duplex |
| Carrier frequency (kHz) | 15.5 |
| Bandwidth (kHz) | 2.35 |
| Data rate after channel decoding (b/s) | 55.8 |
| Maximum number of retransmissions | 3 |
| Runtime of network (h) | 24 |
| Packet generation (s/packet) | 100–1500 |
| Parameter | Value |
|---|---|
| Number of nodes | 5 |
| Number of sink nodes | 1 |
| Transducer directivity | Omnidirectional |
| Modulation system | Mary-DSSS |
| Node communication mode | Half-duplex |
| Carrier frequency (kHz) | 15.5 |
| Bandwidth (kHz) | 2.35 |
| Data rate after channel decoding (b/s) | 55.8 |
| Maximum number of retransmissions | 3 |
| Runtime of network (h) | 24 |
| Packet generation (s/packet) | 600 |
| Network Routing Mode | PDR |
|---|---|
| Cognitive routing | 92.5% |
| Fixed routing | 75.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Zheng, S.; Zhao, Y.; Chen, D.; Tong, F.; Hao, S. SPACNet: A Simulation Platform of an Acoustic Cognitive Network. J. Mar. Sci. Eng. 2023, 11, 1827. https://doi.org/10.3390/jmse11091827
Yang X, Zheng S, Zhao Y, Chen D, Tong F, Hao S. SPACNet: A Simulation Platform of an Acoustic Cognitive Network. Journal of Marine Science and Engineering. 2023; 11(9):1827. https://doi.org/10.3390/jmse11091827
Chicago/Turabian StyleYang, Xiaoyu, Siyuan Zheng, Yanfeng Zhao, Dongsheng Chen, Feng Tong, and Shuaifeng Hao. 2023. "SPACNet: A Simulation Platform of an Acoustic Cognitive Network" Journal of Marine Science and Engineering 11, no. 9: 1827. https://doi.org/10.3390/jmse11091827