

Investigation of Submergence Depth and Wave-Induced Effects on the Performance of a Fully Passive Energy Harvesting Flapping Foil Operating Beneath the Free Surface


Abstract
:1. Introduction
2. Numerical Methodology
2.1. Governing Equations
2.2. Discretization
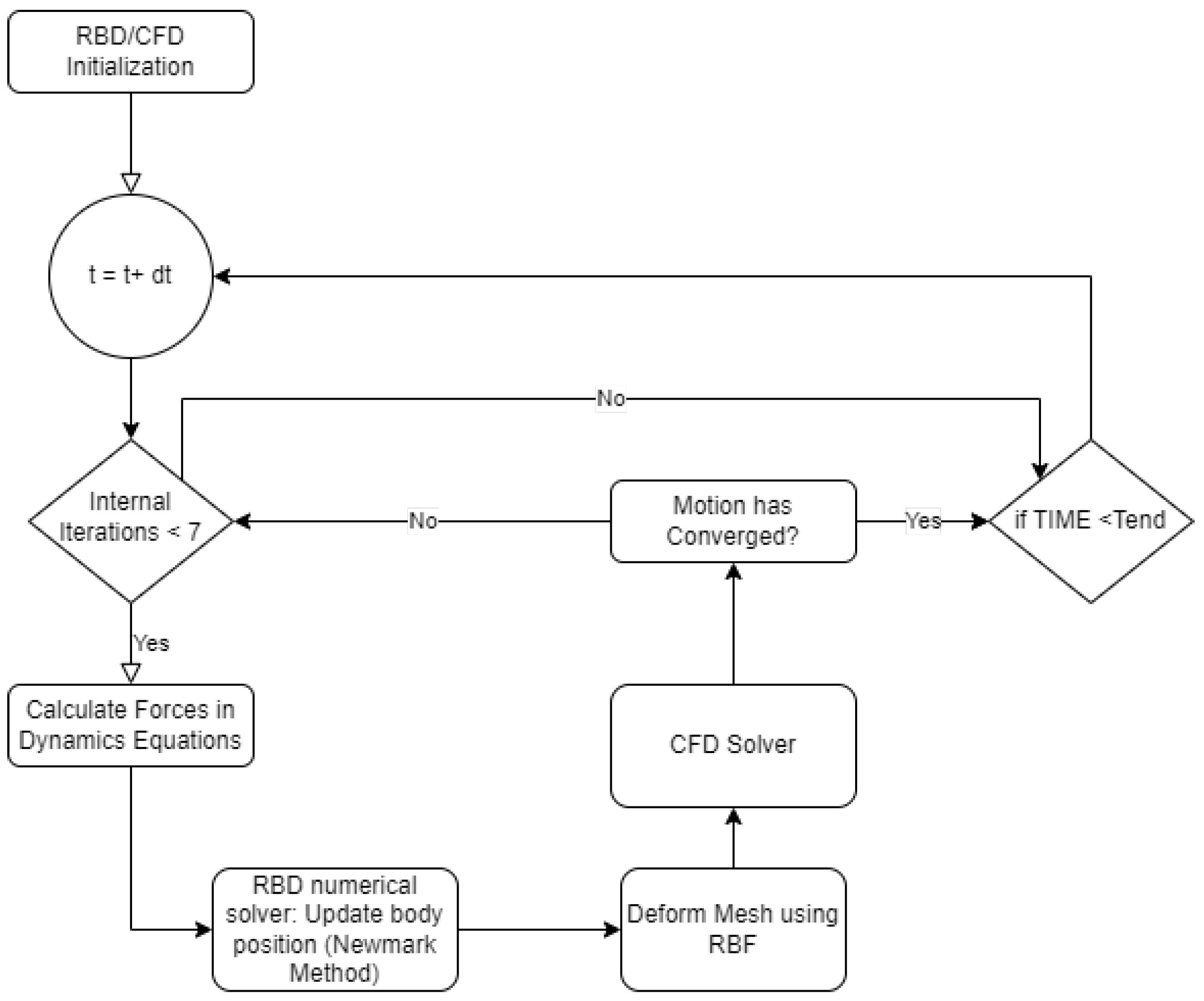
2.3. Fluid Structure Interaction
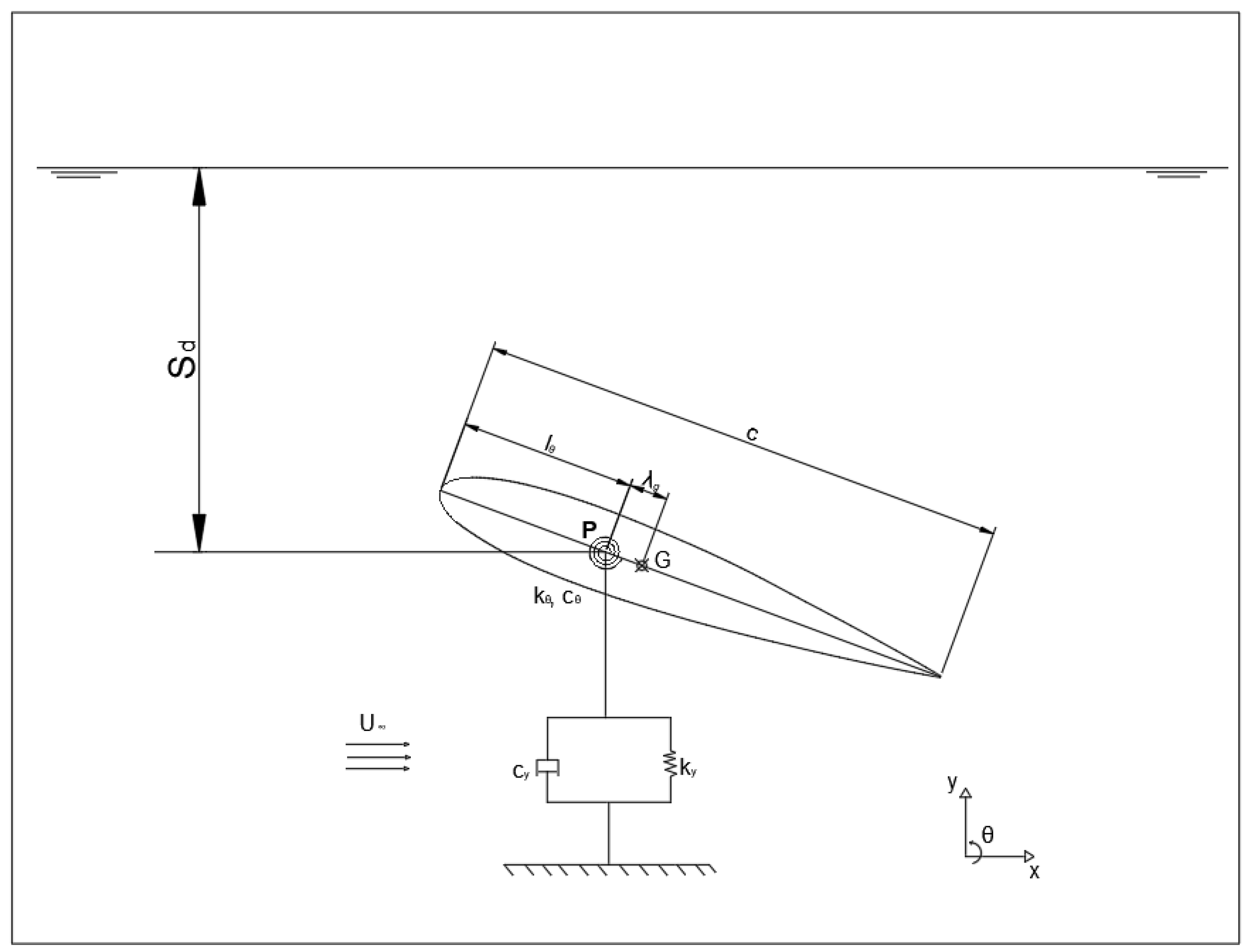
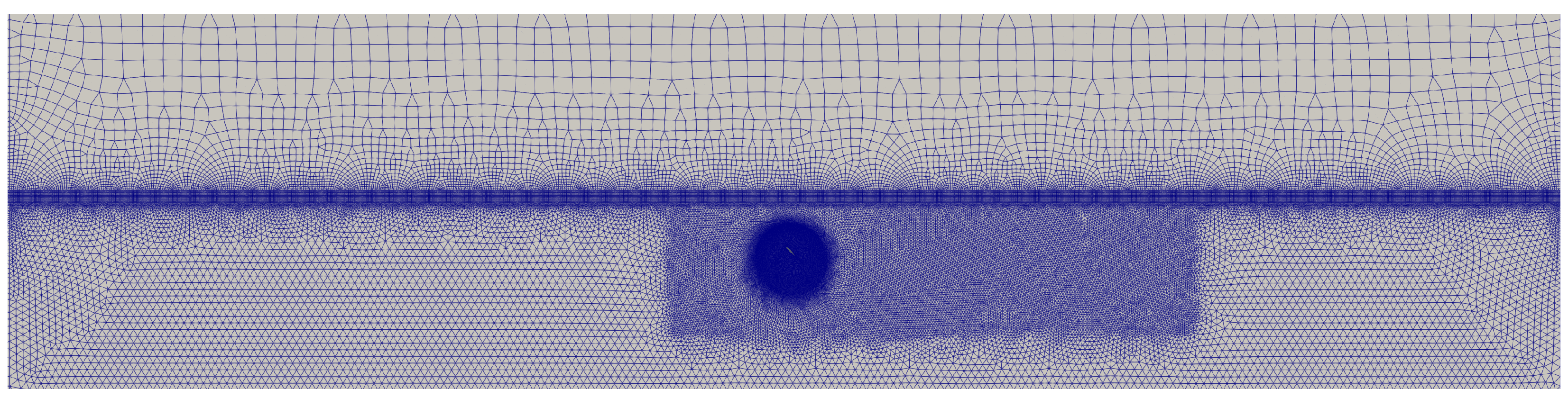
3. Basic Numerical Setup
4. Results and Discussion
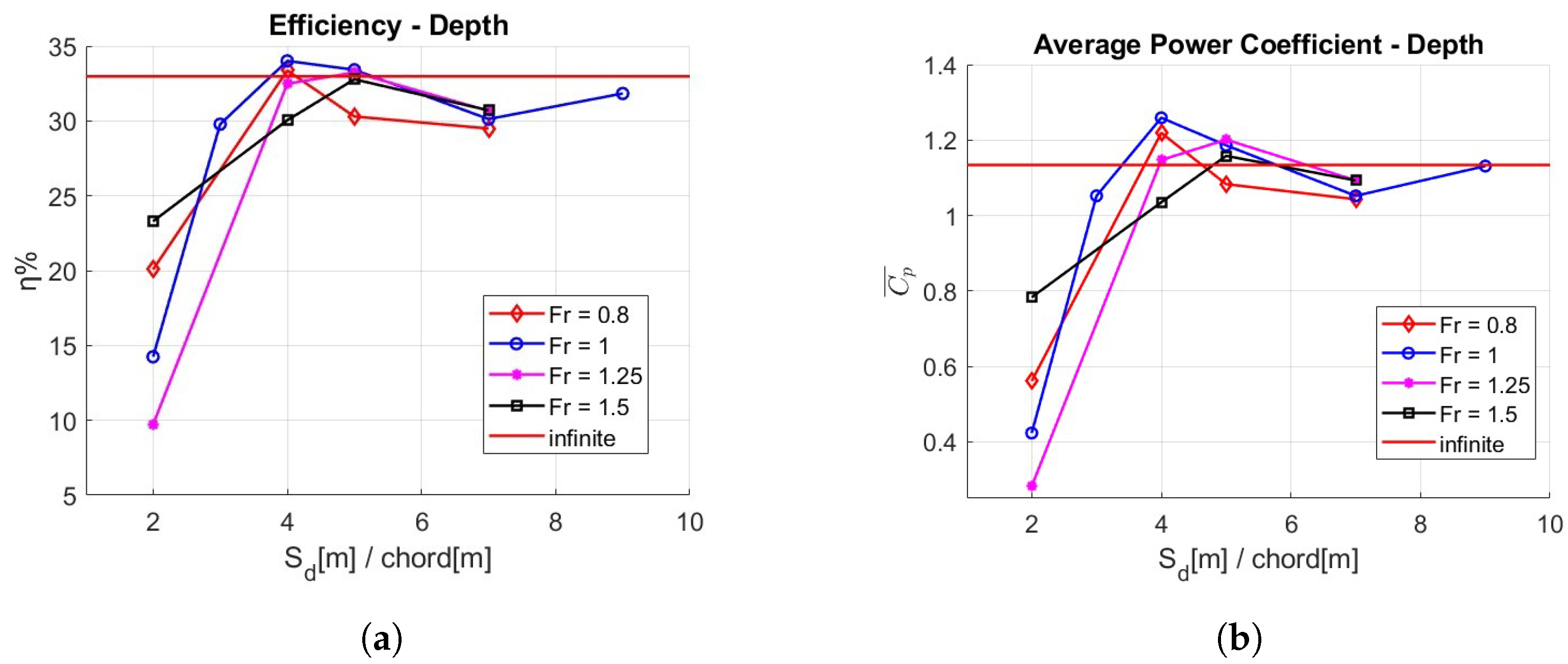
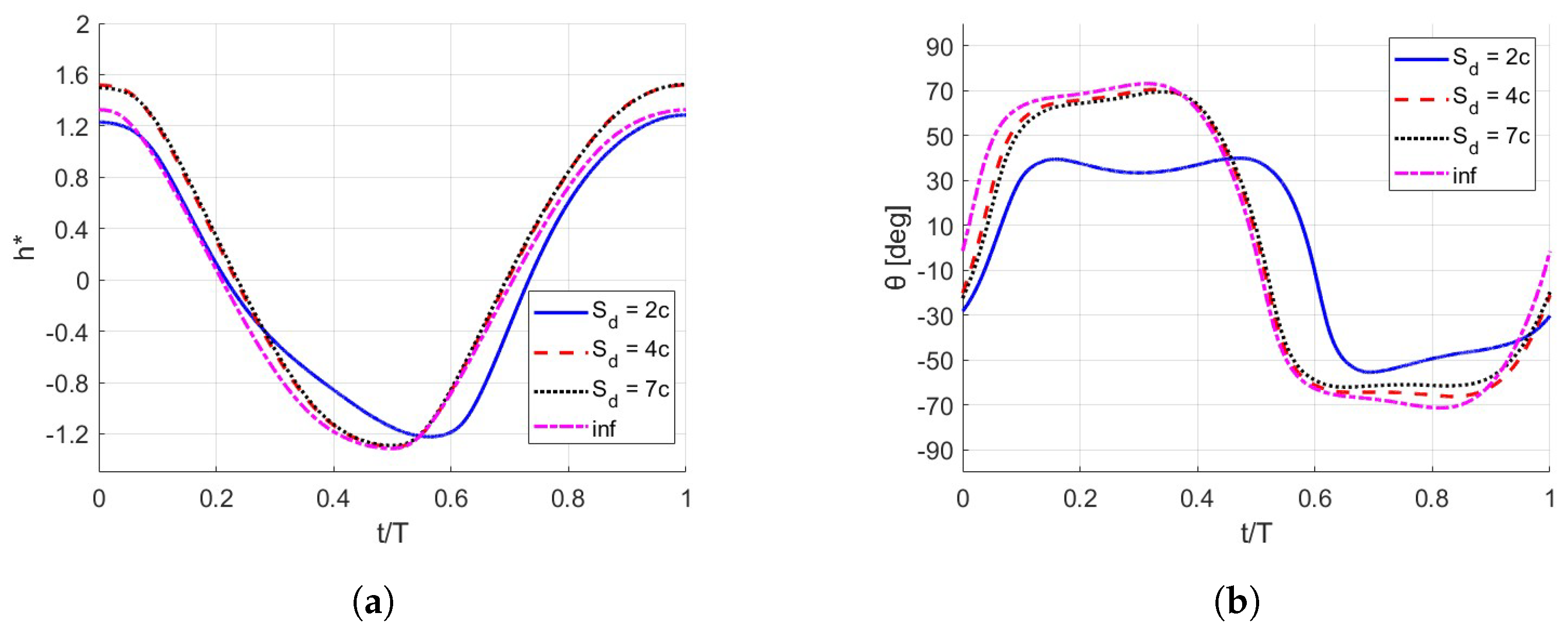
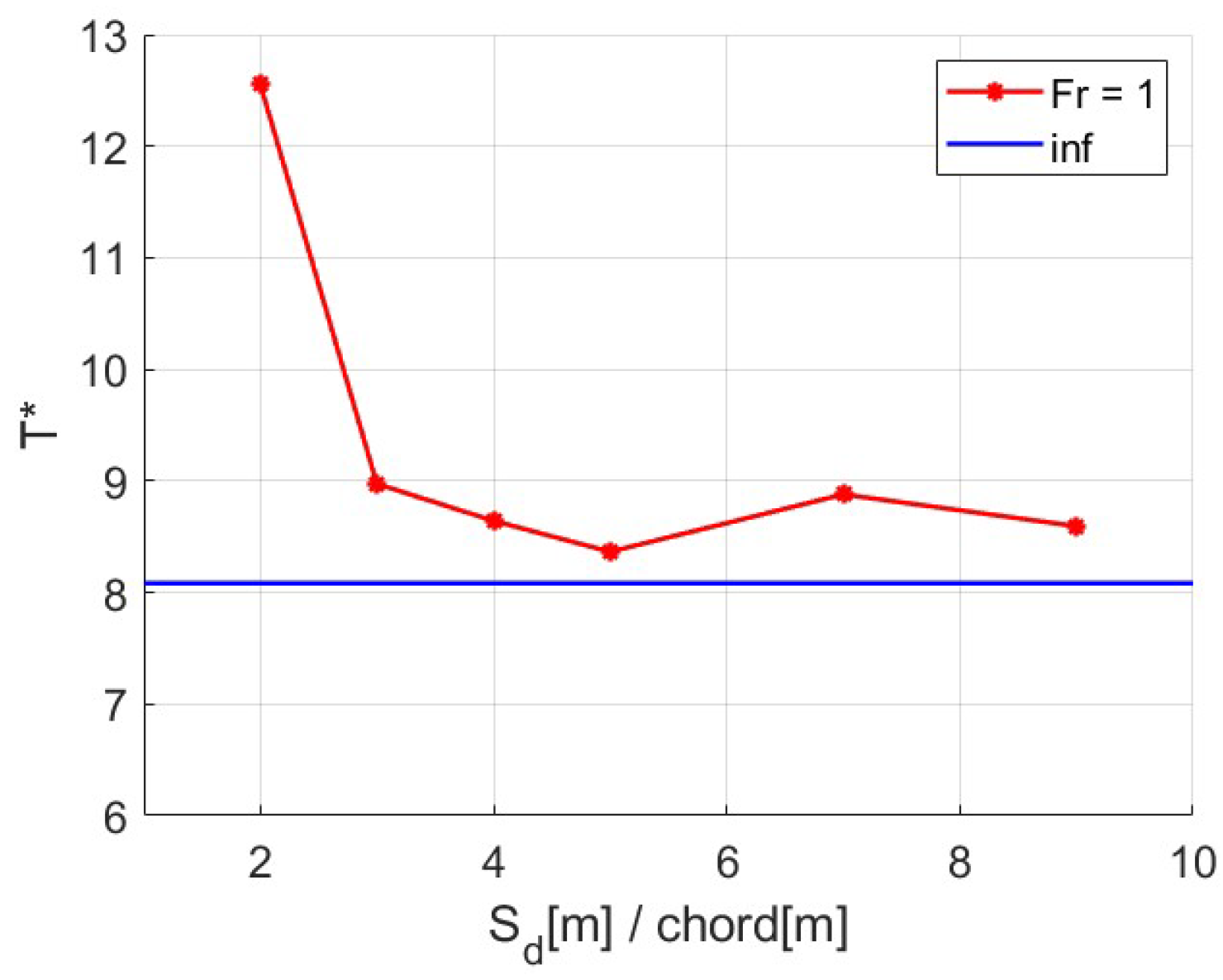
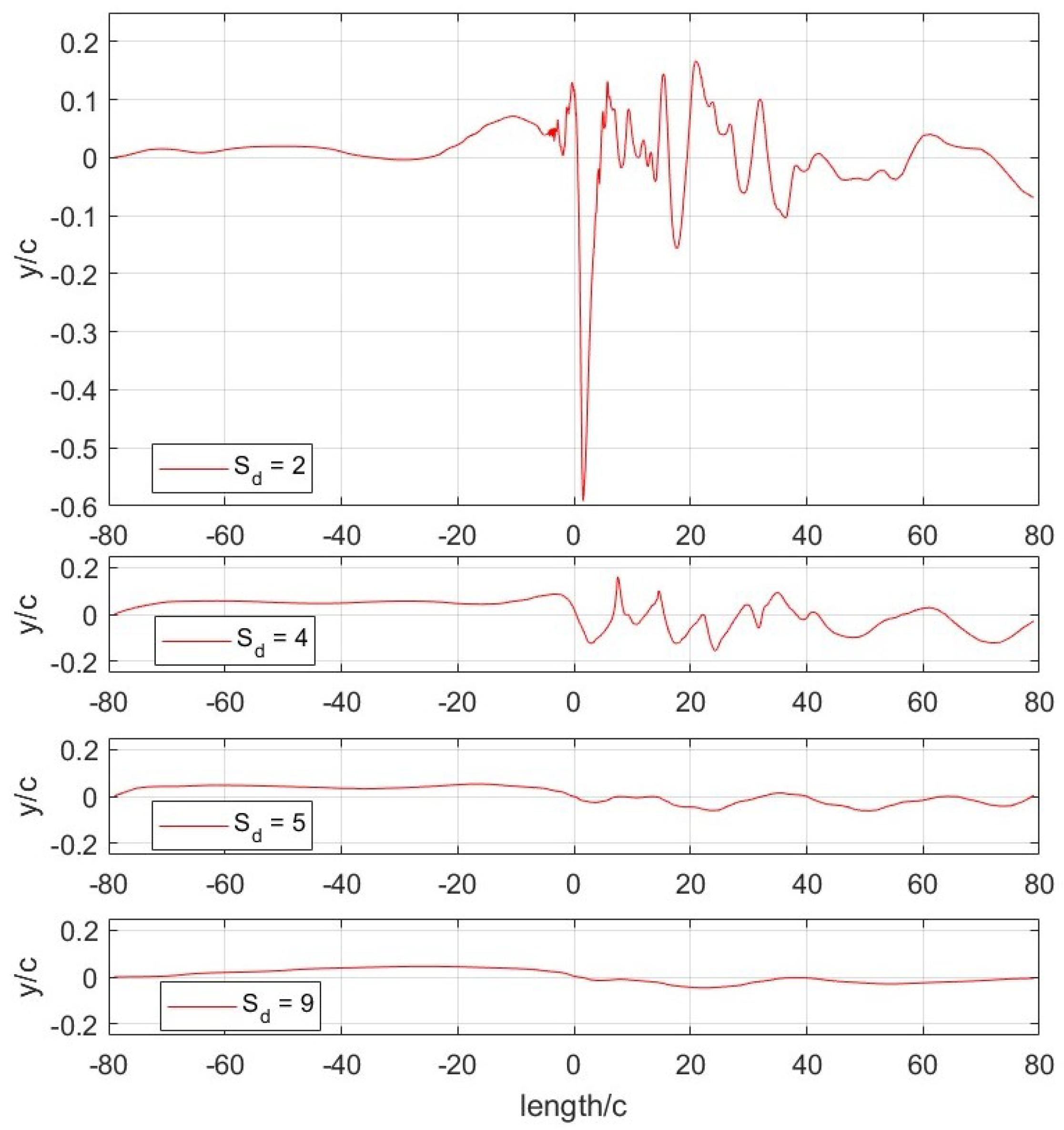
4.1. Effects of Submergence Depth for Various Froude Numbers
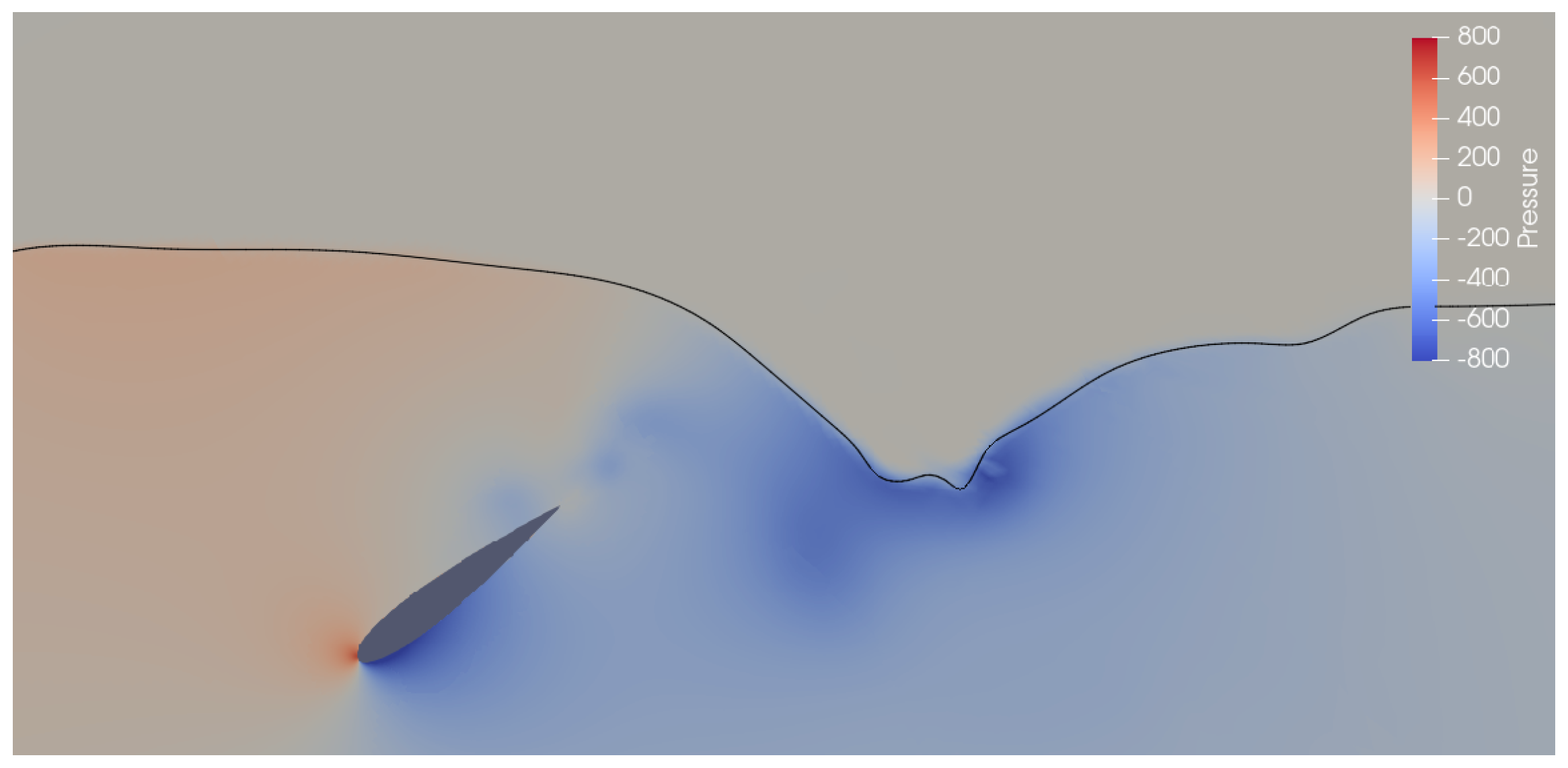
Effects of Submergence Depth for Fr = 1
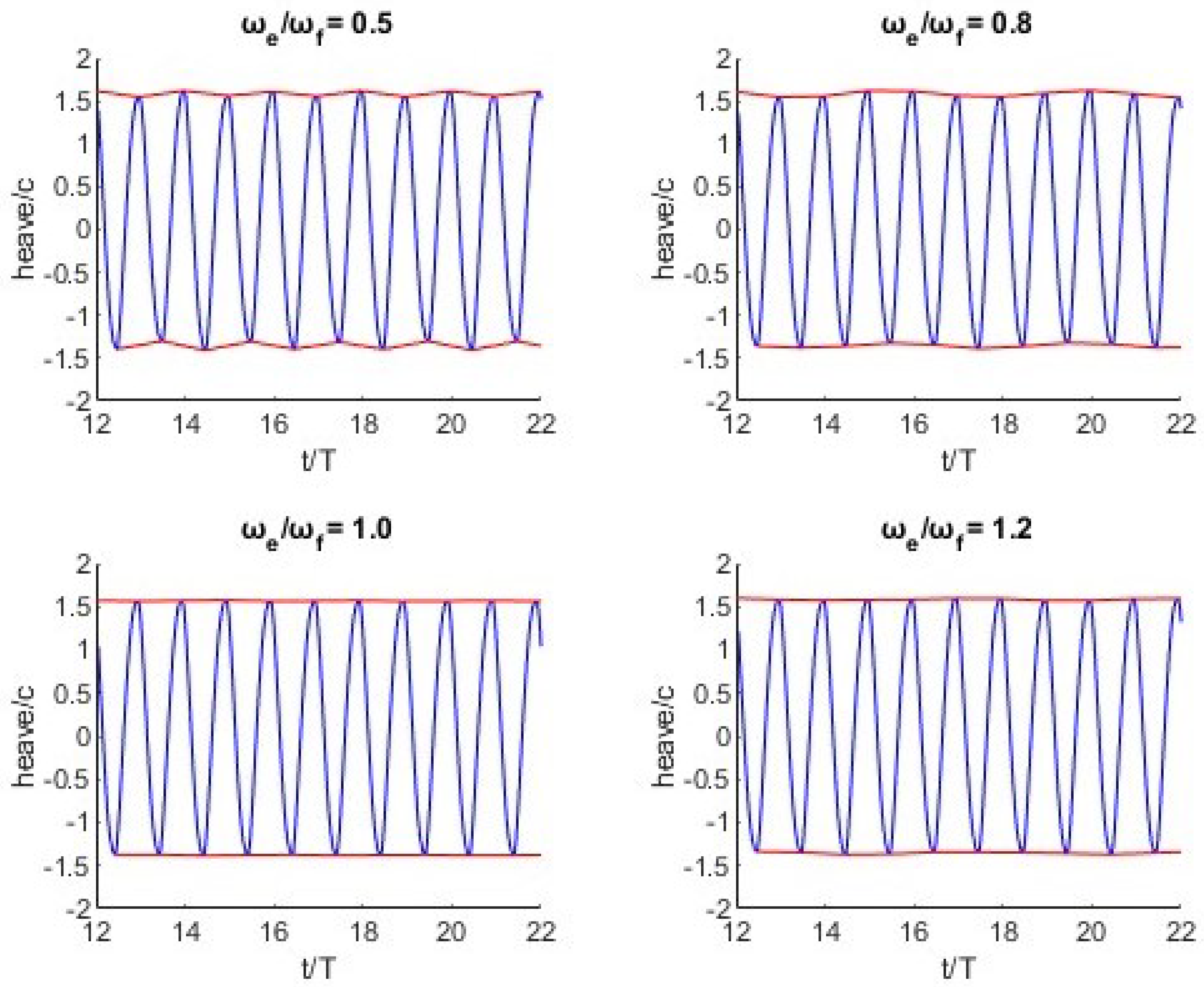
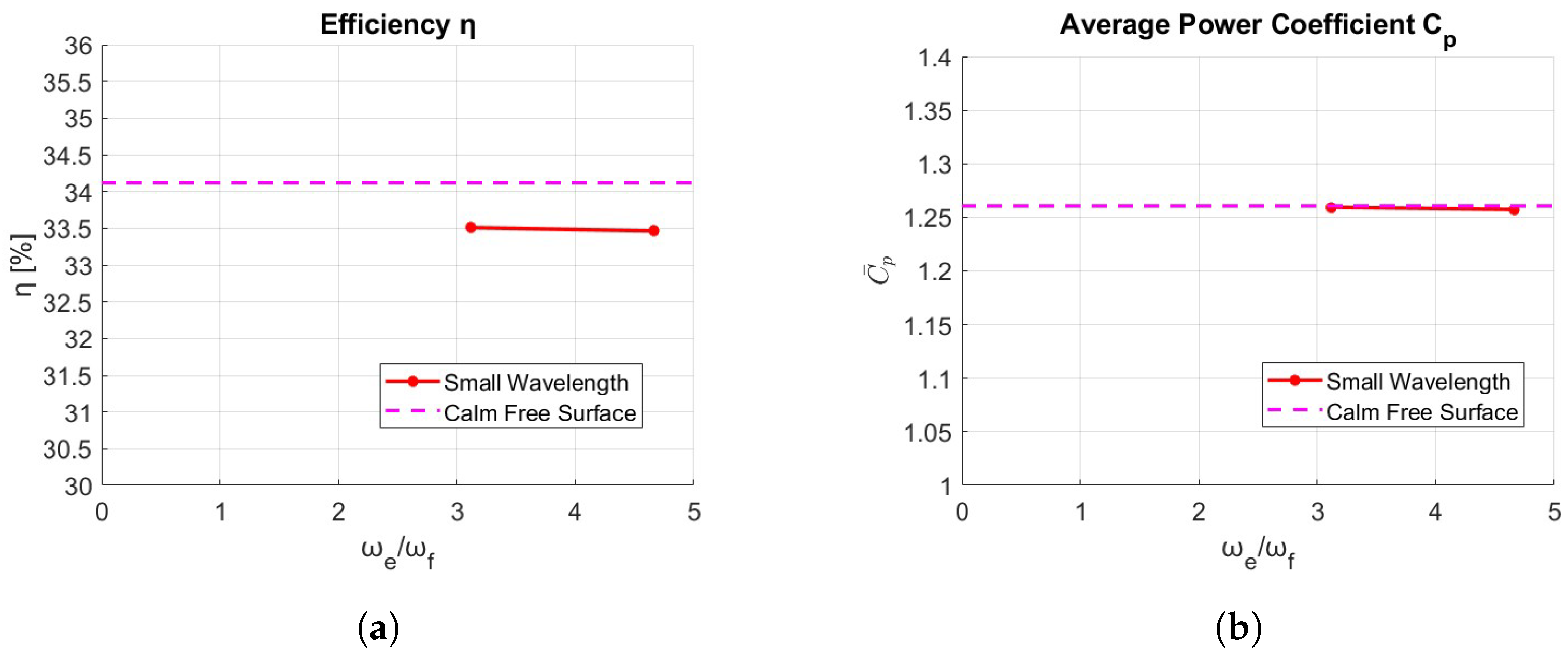
4.2. Effects of Monochromatic Waves
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sfakiotakis, M.; Lane, D.M.; Davies, J.B.C. Review of fish swimming modes for aquatic locomotion. IEEE J. Ocean. Eng. 1999, 24, 237–252. [Google Scholar] [CrossRef] [Green Version]
- Kinsey, T.; Dumas, G. Parametric Study of an Oscillating Airfoil in Power Extraction Regime. AIAA J. 2008, 46, 1318–1330. [Google Scholar] [CrossRef]
- Kiefer, J.; Brunner, C.; Hultmark, M.; Hansen, M. Dynamic stall at high Reynolds numbers due to variant types of airfoil motion. In Proceedings of the Journal of Physics: Conference Series. IOP Publishing, Kuala Lumpur, Malaysia, 19–20 September 2020; Volume 1618, p. 052028. [Google Scholar]
- Young, J.; Lai, J.C.; Platzer, M.F. A review of progress and challenges in flapping foil power generation. Prog. Aerosp. Sci. 2014, 67, 2–28. [Google Scholar] [CrossRef]
- Dai, Y.; Ren, Z.; Wang, K.; Li, W.; Li, Z.; Yan, W. Optimal sizing and arrangement of tidal current farm. IEEE Trans. Sustain. Energy 2017, 9, 168–177. [Google Scholar] [CrossRef]
- Domenech, J.; Eveleigh, T.; Tanju, B. Marine Hydrokinetic (MHK) systems: Using systems thinking in resource characterization and estimating costs for the practical harvest of electricity from tidal currents. Renew. Sustain. Energy Rev. 2018, 81, 723–730. [Google Scholar] [CrossRef]
- McKinney, W.; DeLaurier, J. Wingmill: An oscillating-wing windmill. J. Energy 1981, 5, 109–115. [Google Scholar] [CrossRef]
- Schouveiler, L.; Hover, F.; Triantafyllou, M. Performance of flapping foil propulsion. J. Fluids Struct. 2005, 20, 949–959. [Google Scholar] [CrossRef]
- Andersen, A.; Bohr, T.; Schnipper, T.; Walther, J.H. Wake structure and thrust generation of a flapping foil in two-dimensional flow. J. Fluid Mech. 2017, 812, R4. [Google Scholar] [CrossRef] [Green Version]
- Anevlavi, D.E.; Filippas, E.S.; Karperaki, A.E.; Belibassakis, K.A. A non-linear BEM–FEM coupled scheme for the performance of flexible flapping-foil thrusters. J. Mar. Sci. Eng. 2020, 8, 56. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Q.; Haase, M.; Wu, C.H. Modeling the capacity of a novel flow-energy harvester. Appl. Math. Model. 2009, 33, 2207–2217. [Google Scholar] [CrossRef]
- Peng, Z.; Zhu, Q. Energy harvesting through flow-induced oscillations of a foil. Phys. Fluids 2009, 21, 123602. [Google Scholar] [CrossRef] [Green Version]
- Boudreau, M.; Picard-Deland, M.; Dumas, G. A parametric study and optimization of the fully-passive flapping-foil turbine at high Reynolds number. Renew. Energy 2020, 146, 1958–1975. [Google Scholar] [CrossRef]
- Oshkai, P.; Iverson, D.; Lee, W.; Dumas, G. Reliability study of a fully-passive oscillating foil turbine operating in a periodically-perturbed inflow. J. Fluids Struct. 2022, 113, 103630. [Google Scholar] [CrossRef]
- Balam-Tamayo, D.; Malaga, C.; Figueroa-Espinoza, B. Numerical Study of an Oscillating-Wing Wingmill for Ocean Current Energy Harvesting: Fluid-Solid-Body Interaction with Feedback Control. J. Mar. Sci. Eng. 2021, 9, 23. [Google Scholar] [CrossRef]
- Deng, J.; Wang, S.; Kandel, P.; Teng, L. Effects of free surface on a flapping-foil based ocean current energy extractor. Renew. Energy 2022, 181, 933–944. [Google Scholar] [CrossRef]
- Zhu, B.; Cheng, W.; Geng, J.; Zhang, J. Energy-harvesting characteristics of flapping wings with the free-surface effect. J. Renew. Sustain. Energy 2022, 14, 014501. [Google Scholar] [CrossRef]
- Isshiki, H. A Theory of Wave Devouring Propulsion (1st Report) Thrust Generation by a Linear Wells Turbine. J. Soc. Nav. Archit. Jpn. 1982, 1982, 54–64. [Google Scholar] [CrossRef]
- Liu, P.; Liu, Y.; Huang, S.; Zhao, J.; Su, Y. Effects of regular waves on propulsion performance of flexible flapping foil. Appl. Sci. 2018, 8, 934. [Google Scholar] [CrossRef] [Green Version]
- Lopes, D.; Vaz, G.; de Campos, J.F.; Sarmento, A. Modelling of oscillating foil propulsors in waves. Ocean. Eng. 2023, 268, 113316. [Google Scholar] [CrossRef]
- Xu, G.; Duan, W.; Zhou, B. Propulsion of an active flapping foil in heading waves of deep water. Eng. Anal. Bound. Elem. 2017, 84, 63–76. [Google Scholar] [CrossRef]
- Filippas, E.; Gerostathis, T.P.; Belibassakis, K. Semi-activated oscillating hydrofoil as a nearshore biomimetic energy system in waves and currents. Ocean. Eng. 2018, 154, 396–415. [Google Scholar] [CrossRef]
- Theodorakis, K.; Ntouras, D.; Papadakis, G. Investigation of a submerged fully passive energy-extracting flapping foil operating in sheared inflow. J. Fluids Struct. 2022, 113, 103674. [Google Scholar] [CrossRef]
- Papadakis, G. Development of a Hybrid Compressible Vortex Particle Method and Application to External Problems Including Helicopter Flows. Ph.D. Thesis, National Technical University of Athens, Athens, Greece, 2014. [Google Scholar]
- Diakakis, K. Computational analysis of transitional and massively separated flows with application to Wind Turbines. Ph.D. Thesis, National Technical University of Athens, Athens, Greece, 2019. [Google Scholar]
- Karypis, G. METIS A Software Package for Partitioning Unstructured Graphs, Partitioning Meshes, and Computing Fill-Reducing Orderings of Sparse Matrices Version; Technical Report; Department of Computer Science & Engineering University of Minnesota Minneapolis: Minneapolis, MN, USA, 2013. [Google Scholar]
- Chorin, A. A Numerical Method for Solving Incompressible Visous Flow Problems. J. Comput. Phys. 1967, 135, 118–125. [Google Scholar] [CrossRef]
- Hirt, C.; Nichols, B. Volume of Fluid (VOF) Method for the Dynamics of Free Boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Jameson, A. Time dependent calculations using multigrid, with applications to unsteady flows past airfoils and wings. In Proceedings of the 10th Computational Fluid Dynamics Conference, Stuttgart, Germany, 10–12 June 1991; p. 5. [Google Scholar] [CrossRef]
- Ntouras, D.; Papadakis, G. A coupled artificial compressibility method for free surface flows. J. Mar. Sci. Eng. 2020, 8, 590. [Google Scholar] [CrossRef]
- Nichols, D.S. Development of a Free Surface Method Utilizing an Incompressible Multi-Phase Algorithm to Study the Flow about Surface Ships and Underwater Vehicles. Ph.D. Thesis, Faculty of Mississippi State University, Mississippi State, MS, USA, 2002. [Google Scholar]
- Venkateswaran, S.; Lindau, J.; Kunz, R.; Merkle, C. Preconditioning algorithms for the computation of multi-phase mixture flows. In Proceedings of the 39th Aerospace Sciences Meeting and Exhibit, Reston, VA, USA, 11–14 January 2001; pp. 1–14. [Google Scholar]
- Kunz, R.; Boger, D.; Stinebring, D.; Chyczewski, T.; Lindau, J.; Gibeling, H.; Venkateswaran, S.; Govindan, T. A preconditioned Navier-Stokes method for two-phase flows with application to cavitation prediction. Comput. Fluids 2000, 29, 849–875. [Google Scholar] [CrossRef]
- Menter, F. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Larsen, B.E.; Fuhrman, D.R. On the over-production of turbulence beneath surface waves in Reynolds-averaged Navier-Stokes models. J. Fluid Mech. 2018, 853, 419–460. [Google Scholar] [CrossRef] [Green Version]
- Kamath, A.; Bihs, H.; Alagan Chella, M.; Arntsen, Ø.A. CFD Simulations of Wave Propagation and Shoaling over a Submerged Bar. Aquat. Procedia 2015, 4, 308–316. [Google Scholar] [CrossRef]
- Devolder, B.; Rauwoens, P.; Troch, P. Application of a buoyancy-modified k-omega SST turbulence model to simulate wave run-up around a monopile subjected to regular waves using OpenFOAM. Coast. Eng. 2017, 125, 81–94. [Google Scholar] [CrossRef] [Green Version]
- Peric, R.; Abdel-Maksoud, M. Reliable Damping of Free Surface Waves in Numerical Simulations. Ship Technol. Res. 2015, 63. [Google Scholar] [CrossRef] [Green Version]
- Roe, P. Approximate Riemann solvers, parameter vectors, and difference schemes. J. Comput. Phys. 1981, 43, 357–372. [Google Scholar] [CrossRef]
- Queutey, P.; Visonneau, M. An interface capturing method for free-surface hydrodynamic flows. Comput. Fluids 2007, 36, 1481–1510. [Google Scholar] [CrossRef]
- Leonard, B. Simple high-accuracy resolution program for convective modelling of discontinuities. Int. J. Numer. Methods Fluids 1988, 8, 1291–1318. [Google Scholar] [CrossRef]
- Wackers, J.; Koren, B.; Raven, H.; van der Ploeg, A.; Starke, A.; Deng, G.; Queutey, P.; Visonneau, M.; Hino, T.; Ohashi, K. Free-Surface Viscous Flow Solution Methods for Ship Hydrodynamics. Arch. Comput. Methods Eng. 2011, 18, 1–41. [Google Scholar] [CrossRef] [Green Version]
- Biedron, R.; Vatsa, V.; Atkins, H. Simulation of Unsteady Flows Using an Unstructured Navier-Stokes Solver on Moving and Stationary Grids. In Proceedings of the 23rd AIAA Applied Aerodynamics Conference, Toronto, ON, Canada, 6–9 June 2005; pp. 1–17. [Google Scholar]
- Duarte, L.; Dellinger, G.; Dellinger, N.; Ghenaim, A.; Terfous, A. Implementation and validation of a strongly coupled numerical model of a fully passive flapping foil turbine. J. Fluids Struct. 2021, 102, 103248. [Google Scholar] [CrossRef]
- Duarte, L.; Dellinger, N.; Dellinger, G.; Ghenaim, A.; Terfous, A. Experimental investigation of the dynamic behaviour of a fully passive flapping foil hydrokinetic turbine. J. Fluids Struct. 2019, 88, 1–12. [Google Scholar] [CrossRef]
- Birch, J.M.; Dickson, W.B.; Dickinson, M.H. Force production and flow structure of the leading edge vortex on flapping wings at high and low Reynolds numbers. J. Exp. Biol. 2004, 207, 1063–1072. [Google Scholar] [CrossRef] [Green Version]
- Mo, W.; He, G.; Wang, J.; Zhang, Z.; Gao, Y.; Zhang, W.; Sun, L.; Ghassemi, H. Hydrodynamic analysis of three oscillating hydrofoils with wing-in-ground effect on power extraction performance. Ocean. Eng. 2022, 246, 110642. [Google Scholar] [CrossRef]
- Sheridan, J.; Lin, J.C.; Rockwell, D. Flow past a cylinder close to a free surface. J. Fluid Mech. 1997, 330, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Fenton, J.D. The numerical solution of steady water wave problems. Comput. Geosci. 1988, 14, 357–368. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Parameter | Definition |
|---|---|---|---|
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 0.92 | 0.0065 | ||
| 0.071 | 0.052 | ||
| 0.72 | 0.93 | ||
| 0.0563 | 0.33 |
| Grid | ||
|---|---|---|
| Coarse | − | |
| Medium | − | |
| Fine | - | - |
| Metrics/ | Infinite | ||||||
|---|---|---|---|---|---|---|---|
| 1.26 | 1.45 | 1.44 | 1.40 | 1.40 | 1.41 | 1.32 | |
| (deg) | 47.7 | 66.3 | 71.8 | 70.7 | 65.7 | 67.9 | 72.2 |
| 14.25 | 29.67 | 34.10 | 33.42 | 30.13 | 31.83 | 32.98 | |
| 12.6 | 9.0 | 8.3 | 8.4 | 8.9 | 8.6 | 8.1 | |
| 0.42 | 1.06 | 1.26 | 1.19 | 1.05 | 1.13 | 1.13 |
| Heave Amplitude | ||
|---|---|---|
| calm | – | 1.44 |
| 0.5 | 1.46 | |
| 0.8 | 1.50 | |
| 0.9 | 1.44 | |
| 1.0 | 1.48 | |
| 1.1 | 1.48 | |
| 1.2 | 1.48 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Petikidis, N.; Papadakis, G. Investigation of Submergence Depth and Wave-Induced Effects on the Performance of a Fully Passive Energy Harvesting Flapping Foil Operating Beneath the Free Surface. J. Mar. Sci. Eng. 2023, 11, 1559. https://doi.org/10.3390/jmse11081559
Petikidis N, Papadakis G. Investigation of Submergence Depth and Wave-Induced Effects on the Performance of a Fully Passive Energy Harvesting Flapping Foil Operating Beneath the Free Surface. Journal of Marine Science and Engineering. 2023; 11(8):1559. https://doi.org/10.3390/jmse11081559
Chicago/Turabian StylePetikidis, Nikos, and George Papadakis. 2023. "Investigation of Submergence Depth and Wave-Induced Effects on the Performance of a Fully Passive Energy Harvesting Flapping Foil Operating Beneath the Free Surface" Journal of Marine Science and Engineering 11, no. 8: 1559. https://doi.org/10.3390/jmse11081559