1. Introduction
The large-scale ocean-atmosphere interaction has a wide range, long-term, profound impact on weather and climate, with strong implications for many human activities, and it has become an important topic in climate sciences. The El Niño-Southern Oscillation (ENSO), the most important ocean/atmosphere coupled mode of natural variability, strongly modulates global climate inter-annual variability. The influence of the atmosphere on the ocean is mainly manifested through modifications of ocean flow, temperature and salinity fields. Changes in the ocean environment affect many tasks such as maritime operations [
1], navigation protection [
2], and marine monitoring and early warning systems [
3]. The interannual variability of the global climate caused by the El Niño-Southern Oscillation (ENSO) is significant. There is a close correlation between changes in the ocean temperature and the resulting climate variability. Therefore, in order to study global climate changes, it becomes particularly important to predict sea surface temperatures.
Global SST is not only an important component in the study of global atmospheric and oceanic forecasts, but also a key factor in the study of marine life and global warming [
4]. Therefore, the construction of an accurate and efficient system for predicting global SST is of great importance to marine and climate sciences.
The commonly used methods for predicting ocean data are divided into three main categories: artificial empirical, numerical models [
5,
6] and statistical predictions [
7,
8]. These methods are highly influenced by the parameter settings and the degree of human cognition, and the complex ocean processes cannot obtain better results by complex formulas and tedious calculations. In particular, traditional methods are computationally intensive for marine environment prediction and have low efficiency in real-time prediction. This is because traditional methods cannot accurately forecast extreme oceanic phenomena, while it is more difficult to solve the solutions of complex dynamical equations [
9,
10]. Applying deep learning to the prediction research of ocean big data is an important way to combine the new generation of technology with the application of ocean phenomenon prediction, to break the limitations of the traditional ocean model prediction technology bottleneck and cognitive level, and to expand the application of key technologies such as artificial intelligence in the ocean.
The technology of predicting SST using numerical models has been basically stable, and the Root Mean Square Error (RMSE) of the prediction results has been stable at 0.6–1.0 °C in the last decade, with limited improvement in prediction accuracy [
9,
10]. The method of predicting SST using a combination of ocean big data and deep learning has gradually become a research hotspot [
11,
12,
13,
14,
15], using data to mine spatio-temporal variation patterns and directly learn deep abstract features to achieve prediction, using methods such as Support Vector Machine (SVM) [
16,
17], Artificial Neural Network (ANN) [
18,
19], and Recurrent Neural Network (RNN) [
20,
21].
Convolutional Neural Networks (CNN) are classical feed-forward neural networks that have been shown to be effective for extracting features from images and videos [
22,
23,
24]. In the field of image processing, a two-dimensional (2D) CNN is used to encode the input, extract spatial features through a stage pooling layer, and predict the future state after a solution pool [
25]. Multi-scale 2D CNNs are used as networks for encoding and decoding, which can store high-frequency information and experiment with medium and long term prediction [
26].
Long Short-Term Memory (LSTM) is a special RNN with a faster learning speed that introduces a gate structure to solve the gradient explosion and gradient disappearance that occurs during training [
27,
28]. Two-dimensional (2D) images are transformed into one-dimensional vectors as an input, and continuous motion over time is obtained through encoders and predictors composed of multilayer LSTM networks [
29]. Oh et al. [
30] used 2D CNN and LSTM networks to build a dynamic spatio-temporal sequence prediction architecture that is capable of long-term prediction of high-dimensional videos.
Ocean temperature prediction is a typical spatio-temporal sequence prediction problem. A multilayer perceptron neural network is used to predict SST anomalies in the tropical Pacific Ocean [
31]. An ANN model was proposed to predict SST, and the model used inputs of mean and anomalous values separated by Operational SST and Ice Analysis (OSTIA) data, which is better than the direct prediction using OSTIA data [
32].
A Fully Connected LSTM (FC-LSTM) model structure was proposed for the first time using LSTM networks to predict SST [
33], which enables the effective prediction of coastal areas in China by configuring optimal parameters. Based on this, Yang et al. [
34] combined a convolutional neural network and LSTM network to propose a CFCC-LSTM model, which is able to extract temporal and spatial information from SST. SST data contain information such as trend, period and season in addition to the above information, and wavelet transform is used to decompose the information such as trend and period in SST and then improve the SST prediction via the Multi-Channel LSTM (MC-LSTM) model [
35], which can obtain better prediction results. Hou et al. [
36] proposed an encoder-decoder model (MIMO) that is capable of learning spatio-temporal features from SST data at multiple scales and fusing features through cross scale fusion (CSF).
A Convolutional LSTM (ConvLSTM) network based on the coding-decoding structure was proposed [
37], which uses convolution instead of the product operation of LSTM units and is able to extract high-dimensional spatial features, and is mainly applied to short-time precipitation prediction. Based on this, Zhang et al. [
38] proposed a multilayer superposed ConvLSTM (M-ConvLSTM) structure to predict 3D ocean temperature, which is able to obtain ocean temperature from horizontal and vertical directions for different depth layers. Chen et al. [
39] used a ConvLSTM network to predict the Indian Ocean dipole (IOD) to study climate change and other oceanic phenomena. Various LSTMs were also derived, such as Regional Convolution LSTM (RC-LSTM) [
40], Multivariate Convolutional LSTM (MVC-LSTM) [
41], and so on.
In the past, the SST prediction was mainly focused on special sea areas, such as the coastal areas of China [
42,
43,
44], the Indian Ocean [
39,
45,
46,
47], and the Black Sea [
48]. However, there are fewer studies on global SST prediction using deep learning networks. The issue of climate change is crucial to SST, and studying the impact of global ocean-atmosphere interactions on SST requires the analysis of global SST, which cannot be restricted to a specific region. This is because only regional changes can be analyzed in a given area. In order to be able to study the distribution and variation of global SST, this paper builds a global SST prediction system using two deep learning networks and verifies the effectiveness of the system.
In this paper, we introduce a LSTM network for predicting spatio-temporal sequences and propose two multi-region prediction models based on the encoding and decoding network structures. A framework of a global SST short-term forecasting system is constructed using the multi-region models to realize the short-term forecasting of global SST. The main work of this paper is as follows:
- (1)
Two multiple-input and multiple-output region prediction models based on encoding and decoding network structure are proposed: the models constructed using LSTM and ConvLSTM units named MR-EDLSTM and MR-EDConvLSTM, respectively. Higher dimensional information is extracted using encoding, where the MR-EDLSTM model uses long-driven sequences as input and the MR- EDConvLSTM model uses short-driven sequences as input.
- (2)
A framework of a global SST short-term forecasting system is constructed using the multi-region models to predict the future state based on the historical observed SST data, which has wide applicability.
- (3)
Prediction experiments are performed on the models using OISST data, and the experimental results are analyzed and the model performance is evaluated by different metrics. In addition, a comparison with traditional ocean model prediction methods is made.
The remaining sections of this paper are structured as follows:
Section 2 describes the workflow of the global SST prediction framework and introduces the multi-region model;
Section 3 conducts experiments and evaluates model performance;
Section 4 discusses the applicability of the model;
Section 5 summarizes the conclusions.
4. Discussion
In
Section 3.2, we discuss the Area_RMSE of global SST. Here we focus on the prediction performance of the two models for global SST at each location.
Figure 10 shows the RMSE of global SST predictions for each location on day 1, day 3, day 5, day 7, and day 9. The RMSE of the MR-EDLSTM model are shown on the left side of
Figure 10, and the RMSE of the MR-EDConvLSTM model are shown on the right side of
Figure 10.
By direct observation in
Figure 10, we find that the RMSE of the two models are smaller on day 1, and gradually increase with the RMSE increase gradually as time goes on. The RMSE are mainly concentrated in the range of 0 °C to 0.5 °C on day 1, and in the range of 0.25 °C to 1.0 °C on days 3, 5, 7 and 9.
The percentages of regions with RMSE < 0.25, RMSE < 0.5, and RMSE < 1.0 in the global sea area were calculated, respectively, as shown in
Table 7. The results of MR-EDLSTM model for day 1, day 3, day 5, day 7, and day 9: when RMSE < 0.5, P
were 97.68%, 73.78%, 53.66%, 44.08%, and 39.16%; when RMSE < 1.0, P
were 99.81%, 98.97%, 97.20%, 95.55%, and 94.02%, respectively. The results of MR-EDConvLSTM model for days 1, 3, 5, 7, and 9: when RMSE < 0.5, P
were 93.23%, 72.61%, 55.92%, 45.76%, and 39.49%; when RMSE < 1.0, P
were 99.55%, 98.38%, 96.92%, 95.15%, and 93.19%, respectively. To visualize the distribution of RMSE, we provide the statistics of RMSE for day 1, day 3, and day 5, as shown in
Figure 11.
Table 7 shows that the MR-EDLSTM has better prediction performance of global SST on days 1 and 3, and the MR-EDConvLSTM has better prediction performance on days 5, 7, and 9 when P
is the evaluation criterion. In
Figure 11, the first and second columns represent the MR-EDLSTM model and the MR-EDConvLSTM model, and the first, second, and third rows represent day 1, day 3, and day 5. By direct observation, we found that P
was the largest on the first day. As the number of forecast days increases, P
decreases, P
increases, and the prediction performance gradually decreases.
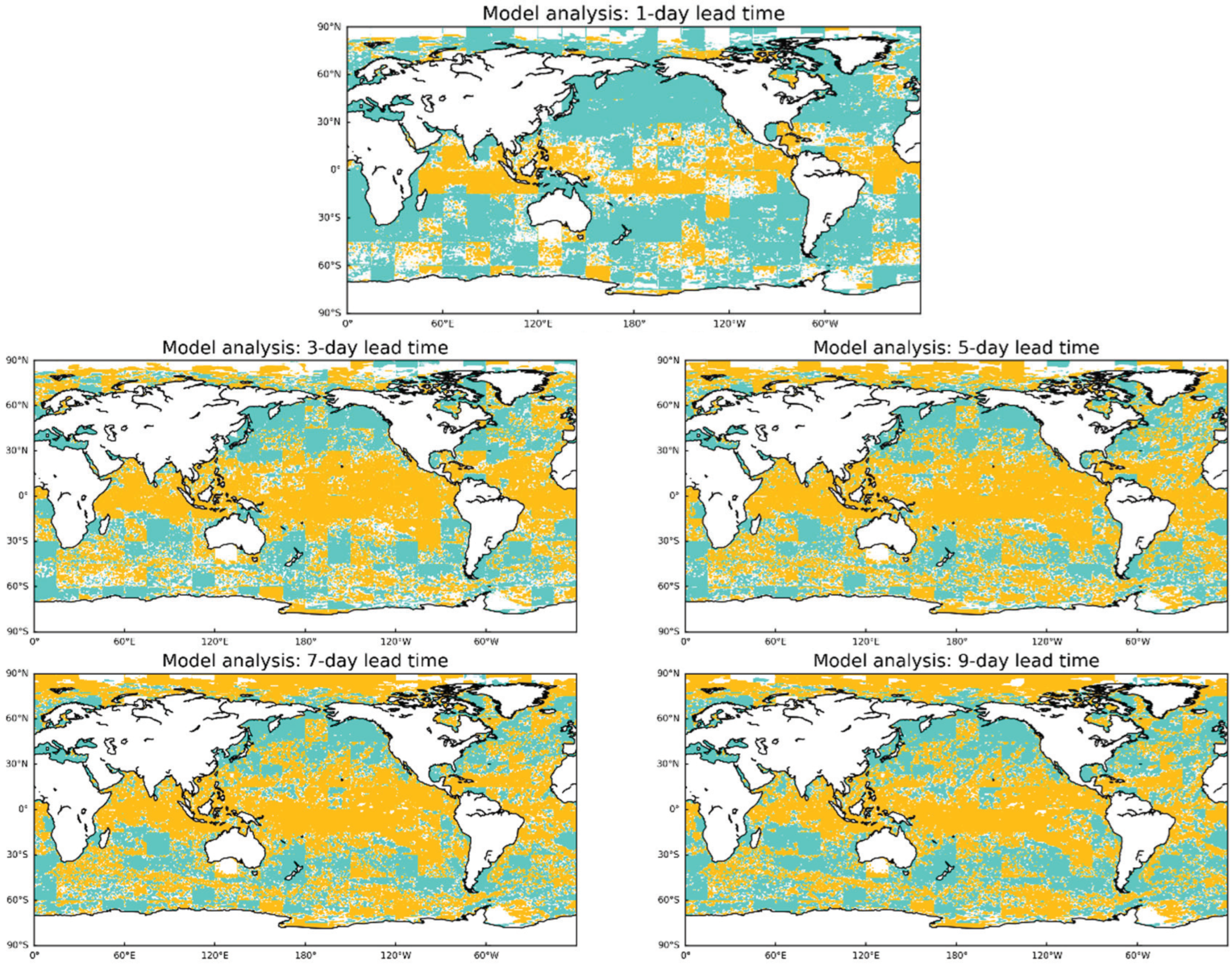
Figure 12 shows the degree of RMSE differences between MR-EDLSTM and MR-EDConvLSTM for global SST prediction, and the locations where MR-EDConvLSTM predicts better than MR-EDLSTM are shown in orange, and the opposite is shown in green. In
Section 3.2, we know that MR-EDLSTM is better in predicting SST from day 1 to day 3. However, from
Figure 12, we find that the MR-EDLSTM model does not perform as well as the MR-EDConvLSTM model in predicting day 1, day 3, day 5, day 7, and day 9 near the latitude 0° sea area.
Therefore, we conclude the following:
(1) The MR-EDLSTM model is more suitable for predicting SST in coastal areas in contact with land, such as the eastern part of Asia, the eastern and northwestern parts of the Americas, and other coastal areas.
(2) The MR-EDConvLSTM model is more suitable for predicting SST in seas near the equator, such as the Pacific, Indian, and Atlantic Oceans near the equator.
5. Conclusions
This paper focuses on a global SST prediction method based on deep learning. By using the dynamic region partitioning method, the global sea area is divided into several equal-sized blocks, and the global SST prediction is realized via the multi-region and multi-model framework. Using the idea of migration learning, the model is only initialized once and trained on the basis of the original weights when training other regions, which accelerates the training speed of the model and reduces the running memory consumption. The proposed MR-EDLSTM model is better at prediction of global SST, with RMSE and PACC reaching 0.2712 °C and 98.81% on the first day. In terms of SST seasonal prediction, the proposed model has a smaller RMSE between January and April and November and December, however, the prediction error is relatively larger between May and October. Compared with the LICOM marine environmental forecasting system (LFS) based on the ocean model, the RMSE of the deep learning model is smaller from day 1 to day 7, which indicates that the model has higher prediction ability and verifies the advantage of the deep learning method in predicting global SST.
In our future work, we will continue to improve the model, optimize the global prediction framework, improve the prediction speed, and extend it to the field of spatio-temporal series prediction of other marine environmental elements.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}