
Analysis of the Steady-Stream Active Flow Control for the Blended-Winged-Body Underwater Glider

Abstract
:1. Introduction
2. Materials and Methods
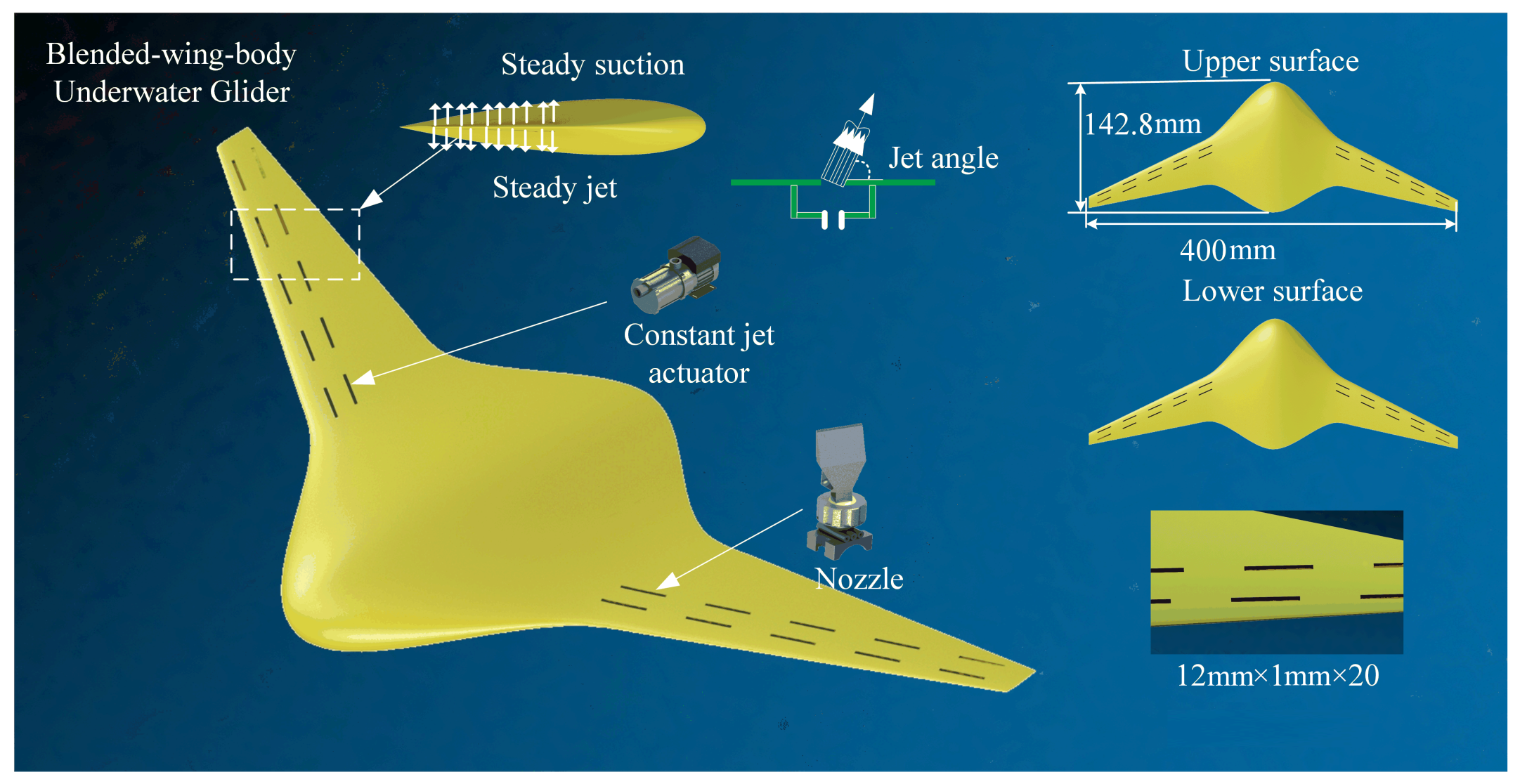
2.1. Geometric Model and Reference Definition
2.2. Flow Field Calculation Model
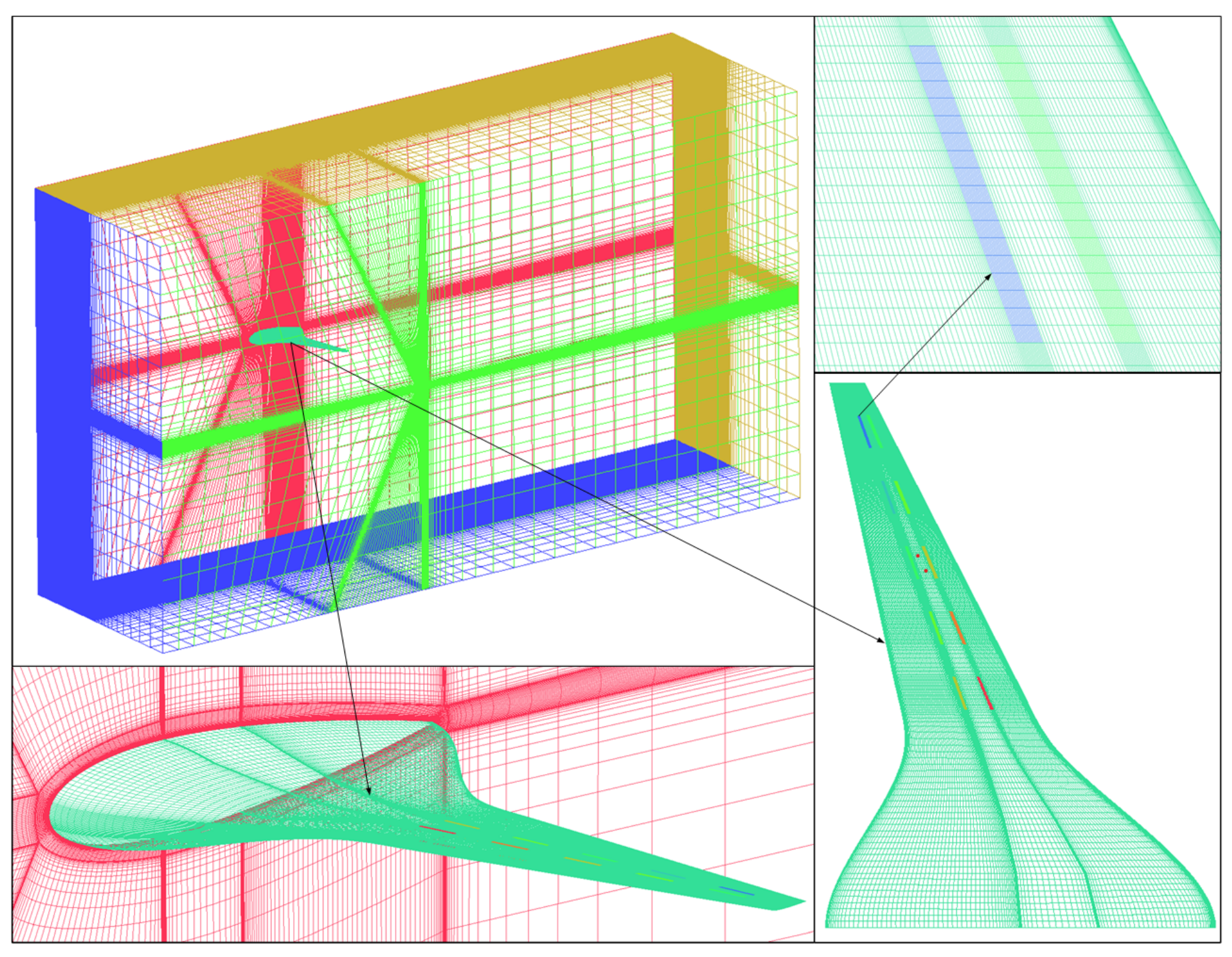
2.3. Computational Domain and Boundary Conditions
2.4. Validation of Numerical Calculation Method
2.5. Independence Validation of Flow Field Calculation Method
3. Results and Discussion of Flow Field Calculation
3.1. Study on Steady-Suction AFC
3.2. Study on Steady-Jet AFC
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclatures and Abbreviations
| Jet/suction flow rate | |
| Direction angle | |
| Lift coefficient | |
| Drag coefficient | |
| Pressure coefficient | |
| Surface pressure | |
| Reference pressure | |
| Velocity coefficient | |
| Local fluid flow velocity | |
| R | Lift-to-drag ratio |
| Wetted surface area | |
| Lift force | |
| Drag force | |
| Flow velocity at infinity | |
| Density of seawater | |
| p | Fluid pressure |
| Dynamic viscosity coefficient | |
| ,, | Time-averaged velocity component |
| ,, | Pulsating velocity components |
| ,, | Generalized source terms |
| L | Spread length of BWB-UG |
| f | Discrete solution of the numerical calculation; |
| h | Grid feature size |
| r | Refinement ratio of the grid |
| Grid convergence security factor |
References
- D’Spain, G.L.; Jenkins, S.A.; Zimmerman, R.; Luby, J.C.; Thode, A.M. Underwater acoustic measurements with the Liberdade/X-Ray flying wing glider. J. Acoust. Soc. Am. 2005, 117, 2624. [Google Scholar] [CrossRef]
- Du, X.; Song, B.w.; Pan, G. Dynamics and Simulation of Underwater Glide Vehicle. In Proceedings of the 2010 International Conference on Digital Manufacturing Automation, Changcha, China, 18–20 December 2010; Volume 1, pp. 597–599. [Google Scholar]
- Du, X.; Ali, N. Numerical Computation of Wave Forces on Blended Winged-Body Underwater Glider using Panel Method. In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021; pp. 924–931. [Google Scholar]
- Du, X.; Zhang, L. Analysis on energy consumption of blended-wing-body underwater glider. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420920534. [Google Scholar] [CrossRef]
- Li, J.; Wang, P.; Chen, X.; Dong, H. Shape Optimization of Blended-Wing-Body Underwater Gliders Based on Free-Form Deformation. J. Northwestern Polytech. Univ. 2020, 38, 459–464. [Google Scholar]
- Sun, C.; Song, B.; Wang, P. Parametric geometric model and shape optimization of an underwater glider with blended-wing-body. Int. J. Nav. Archit. Ocean Eng. 2015, 7, 995–1006. [Google Scholar] [CrossRef] [Green Version]
- Sun, C.; Song, B.; Wang, P.; Wang, X. Shape optimization of blended-wing-body underwater glider by using gliding range as the optimization target. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 693–704. [Google Scholar] [CrossRef]
- Wang, X.; Song, B.; Wang, P.; Sun, C. Hydrofoil optimization of underwater glider using Free-Form Deformation and surrogate-based optimization. Int. J. Nav. Archit. Ocean Eng. 2018, 10, 730–740. [Google Scholar] [CrossRef]
- Ganesh, N.; Arunvinthan, S.; Nadarajapillai, S. Effect of surface blowing on aerodynamic characteristics of tubercled straight wing. Chin. J. Aeronaut. 2019, 32, 1111–1120. [Google Scholar] [CrossRef]
- Fatahian, E.; Nichkoohi, A.L.; Salarian, H.; Khaleghinia, J. Effects of the hinge position and suction on flow separation and aerodynamic performance of the NACA 0012 airfoil. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 86. [Google Scholar] [CrossRef]
- Giorgi, M.G.D.; Luca, C.G.D.; Ficarella, A.; Marra, F.S. Comparison between synthetic jets and continuous jets for active flow control: Application on a NACA 0015 and a compressor stator cascade. Aerosp. Sci. Technol. 2015, 43, 256–280. [Google Scholar] [CrossRef]
- Rezaeiha, A.; Montazeri, H.H.; Blocken, B. Active flow control for power enhancement of vertical axis wind turbines: Leading-edge slot suction. Energy 2019, 189, 116131. [Google Scholar] [CrossRef]
- Lienhart, H.; Becker, S. Flow and Turbulence Structure in the Wake of a Simplified Car Model. SAE Trans. 2003, 112, 785–796. [Google Scholar]
- McNally, J.; Fernandez, E.J.; Robertson, G.; Kumar, R.; Taira, K.; Alvi, F.S.; Yamaguchi, Y.; Murayama, K. Drag reduction on a flat-back ground vehicle with active flow control. J. Wind Eng. Ind. Aerodyn. 2015, 145, 292–303. [Google Scholar] [CrossRef]
- Rouméas, M.; Gilliéron, P.; Kourta, A. Drag reduction by flow separation control on a car after body. Int. J. Numer. Methods Fluids 2009, 60, 1222–1240. [Google Scholar] [CrossRef]
- Genç, M.S.; Kaynak, U.; Yapici, H. Performance of transition model for predicting low Re aerofoil flows without/with single and simultaneous blowing and suction. Eur. J. Mech. B-Fluids 2011, 30, 218–235. [Google Scholar] [CrossRef]
- Huang, L.; Huang, P.G.; LeBeau, R.P.; Hauser, T. Numerical study of blowing and suction control mechanism on NACA0012 airfoil. J. Aircr. 2004, 41, 1005–1013. [Google Scholar] [CrossRef]
- Xu, H.Y.; Dong, Q.; Qiao, C.L.; Ye, Z. Flow Control over the Blunt Trailing Edge of Wind Turbine Airfoils Using Circulation Control. Energies 2018, 11, 619. [Google Scholar] [CrossRef] [Green Version]
- Yousefi, K.; Saleh, R.; Zahedi, P. Numerical study of blowing and suction slot geometry optimization on NACA 0012 airfoil. J. Mech. Sci. Technol. 2014, 28, 1297–1310. [Google Scholar] [CrossRef] [Green Version]
- Du, X.; Liu, X.; Song, D. Coupled physics analysis of blended-wing-body underwater glider equipped with electromagnetic active flow control. Ocean Eng. 2023, 278, 114402. [Google Scholar] [CrossRef]
- Baker, N.; Kelly, G.; O’Sullivan, P.D. A grid convergence index study of mesh style effect on the accuracy of the numerical results for an indoor airflow profile. Int. J. Vent. 2019, 19, 300–314. [Google Scholar] [CrossRef]
- Roache, P.J. Error Bars for CFD. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 2003; p. 2003-408. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value |
|---|---|
| Spread length of UG | 400 mm |
| Maximum chord length of UG | 142.8 mm |
| Section of UG | NACA0015 |
| Length of nozzle | 12 mm |
| Width of nozzle | 1 mm |
| Number of nozzles | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, X.; Liu, X.; Song, Y. Analysis of the Steady-Stream Active Flow Control for the Blended-Winged-Body Underwater Glider. J. Mar. Sci. Eng. 2023, 11, 1344. https://doi.org/10.3390/jmse11071344
Du X, Liu X, Song Y. Analysis of the Steady-Stream Active Flow Control for the Blended-Winged-Body Underwater Glider. Journal of Marine Science and Engineering. 2023; 11(7):1344. https://doi.org/10.3390/jmse11071344
Chicago/Turabian StyleDu, Xiaoxu, Xin Liu, and Yani Song. 2023. "Analysis of the Steady-Stream Active Flow Control for the Blended-Winged-Body Underwater Glider" Journal of Marine Science and Engineering 11, no. 7: 1344. https://doi.org/10.3390/jmse11071344