Path Following of an Underwater Snake-like Robot Exposed to Ocean Currents and Locomotion Efficiency Optimization Based on Multi-Strategy Improved Sparrow Search Algorithm


Abstract
:1. Introduction
2. Path following Based on ILOS
2.1. Motion Control Approaches of Underwater Snake-like Robot
2.1.1. Notations and Defined Symbols
2.1.2. Complete Control-Oriented Model
2.2. Path Planning and ILOS−Based Controller
2.2.1. Control Objective
- (1)
- Straight path following:
- (2)
- Curve path following
2.2.2. Motion Pattern
2.2.3. Path Planning Based on PCSI
- (1)
- is satisfied on each ;
- (2)
- There is a continuous second derivative;
- (3)
- There is a cubic polynomial in each
2.2.4. Outer-Loop Controller
2.2.5. Inner-Loop Controller
2.2.6. Improved ILOS Methods for Curved Path Following
3. Locomotion Efficiency Optimization Based on MISSA
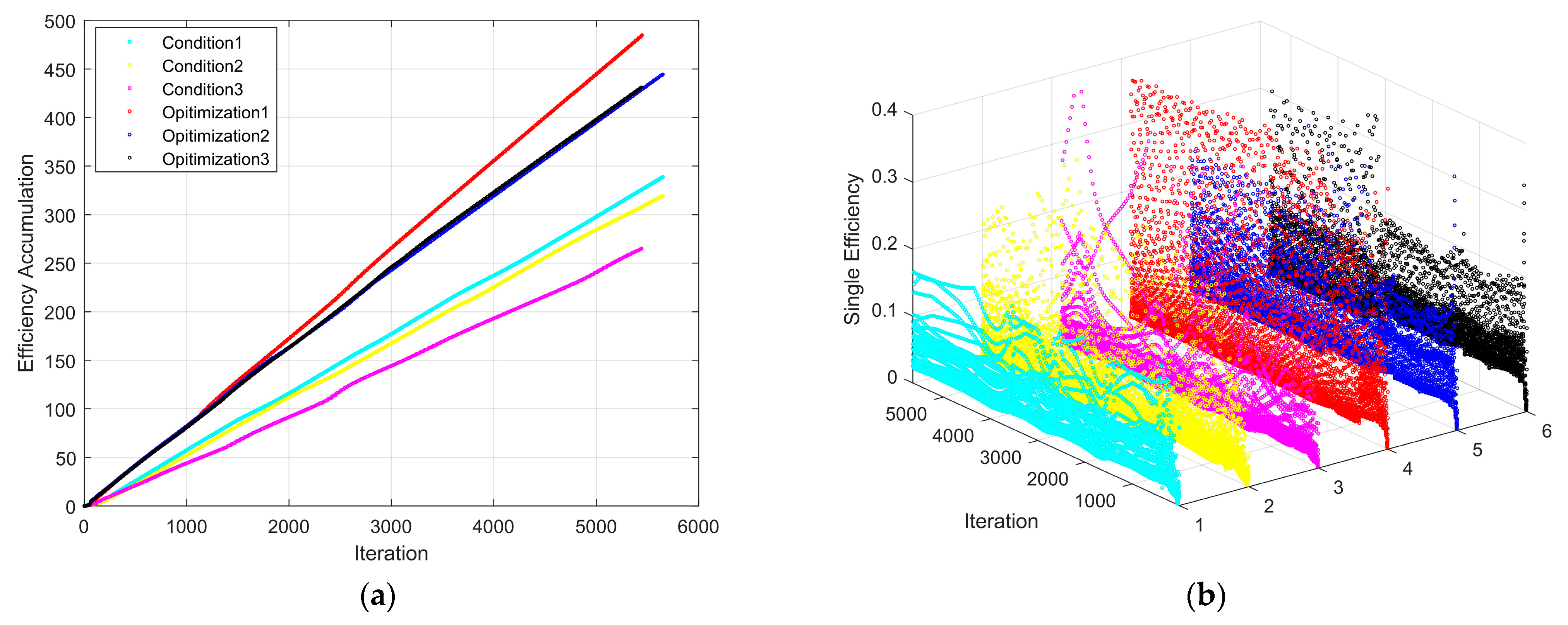
3.1. Efficiency of Underwater Snake-like Robot
3.2. Efficiency Optimization with MISSA
3.2.1. Principle of the Sparrow Search Algorithm
- (a)
- The producer population constitutes approximately 20% of the total sparrow population. Producers tend to possess high levels of energy reserves that can guide foraging areas or directions for the entire population. In the context of the parameter optimization problem addressed in this paper, the producer corresponds to the parameter combination that exhibits a fitness value that ranks within the top 20% of the population. The update rule for the producer’s location is expressed as follows:
- (b)
- The scrounger population accounts for approximately 80% of the total sparrow population, and they typically follow producers to locate sources of food. For the parameter optimization problem addressed in this paper, the scrounger corresponds to the parameter combination that does not rank in the top 20% of the population in terms of fitness value. The update rule for the scrounger’s location is expressed as follows:
- (c)
- A small subset of the sparrow population, ranging from 10% to 20%, is randomly selected to serve as watchdogs. Watchdogs are responsible for ensuring the diversity and stability of the population. The update rule for the watchdog’s location is expressed by Equation (25), as follows:
3.2.2. Multi-Strategy Improved SSA
- (1)
- In the initialization phase of the sparrow search algorithm, the random generation method can lead to an uneven distribution of the sparrow population, which can adversely impact the optimization process during later iterations. To address this issue, researchers have proposed the use of chaotic mapping due to its characteristics of randomness, ergodicity, and regularity [38]. Chaotic sequences can be used to initialize the position of individual sparrows. Tang et al. [39] employed the cube chaotic mapping to increase the diversity of the population, and also incorporated the elite reverse learning strategy and sine and cosine optimization algorithm to enhance the sparrow search algorithm, resulting in improved accuracy and stable planning of feasible flight paths for unmanned aerial vehicles (UAVs). However, L. Shan et al. [40], found that tent mapping, although more evenly distributed, has small and unstable periods that may lead to fixed points. On the other hand, circle mapping is relatively stable and exhibits similar uniformity as the tent map [41]. In this study, we adopt circle chaotic mapping to generate the initial population, which is defined as follows:
- (2)
- To improve the convergence performance of the production population of the algorithm and give the population lower divergence and better stability, this paper carries out crossover and variation on the optimal value of the production population according to a certain probability. Individual producers use binary coding, where the extremum of the individual body crosses the extremum of the population. The crossover probability (pc) is a crucial factor in balancing local and global searches. However, a fixed probability value is commonly used, and the simulation results indicate that an excessively large crossover probability can cause the population to become erratic, leading to a failure to converge. Conversely, an overly low crossover probability can significantly slow the algorithm’s convergence and extend computation time. To address this issue, this paper proposes an adaptive adjustment method for the value of pc, as shown in Equation (28):
- (3)
- In this paper, a Student-distribution perturbation is applied to individuals whose fitness value is less than the population’s average fitness value after each algorithm iteration. The probability density of the Student distribution, also known as T-distribution, is defined by a freedom parameter v and is given by the following formula:
| Algorithm 1: The framework of MISSA |
| Input: N: The number of sparrows N_P: The number of producers N_S: The number of scroungers N_W: The number of watchdogs M_I: The maximum iterations Output: X_best: The sparrow corresponding to the optimal fitness value F_best: The optimal fitness value 1: Initialize N sparrows based on a chaotic map and define their relevant parameters; 2: while (t < M_I) 3: for i = 1: N_P 4: Update producers’ locations according to Equation (23); 5: end for 6: Follow Steps 3–5 to update the positions of scroungers and watchdogs, respectively, according to Equations (24) and (25); 7: Get the current global optimal and worst location; 8: Calculate the crossover probability Pc and mutation probability Pm, respectively, according to Equations (28) and (29); 9: if Pc < rand 10: Convert individual optimal value and population optimal value into binary and cross them; 11: end if 12: if Pm < rand 13: Randomly select an individual from the producers, convert it into binary, and change a value in its data sequence; 14: end if 15: for i = 1: N/2 16: Differential evolution of N/2 individuals with high fitness according to Equation (31); 17: end for 18: for i = N/2 + 1: N 19: Perform Student-distribution perturbation on N/2 individuals with low fitness according to Equation (30); 20: end for 21: Get the current new position. If the current position is better than the previous, update it; 22: t = t + 1 23: end while 24: return X_best, F_best |
4. Simulation Study
| Algorithm 2: The framework of USR simulation |
| Input: X0, Y0: Horizontal and vertical coordinates of waypoints Vx, Vy: The current in the global coordinate system N: The number of links of USR Explanation: S0: Virtual point values corresponding to waypoints on the planned curve S: Virtual point values of simulation u: Nonsingular terminal sliding mode controller input Initialize the state of USR and define its relevant parameters. 1: Using coordinates of waypoints X0, Y0 plan a smooth path according to Equations (7) and (8); 2: while (S(t) < S0(end)) 3: Using Equation (15), update the value of the virtual point; 4: Using ILOS, calculate reference heading angle; 5: for i = 1: N − 1 6: Obtain sinusoidal reference signal with Equation (6); 7: end for 8: Obtain controller input u with Equation (13); 9: Update USR’s status; 10: Update gait parameters of USR with optimization algorithm MISSA; 11: t = t + 1 12: end while |
4.1. Algorithm Performance Test
4.2. Parameter Setting
4.3. Path following and Efficiency Optimization
4.3.1. Path following with Adaptive Forward Distance
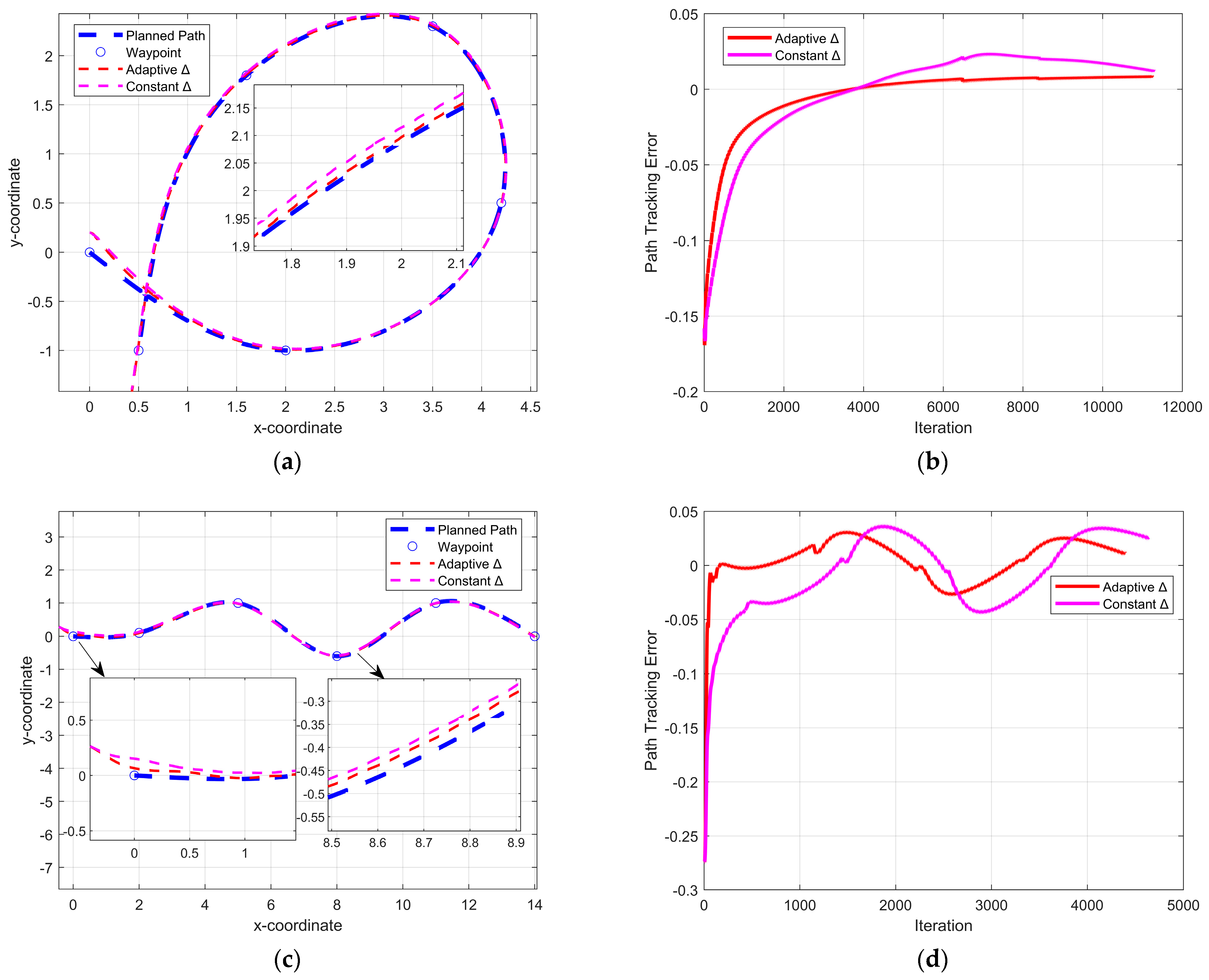
4.3.2. Giant Slewing Path
4.3.3. Continuous Turning Path
5. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nakashima, M.; Tokuo, K.; Amiaga, K.; One, K. Experimental Study of a Self-Propelled Two-Joint Dolphin Robot. In Proceedings of the Ninth International Offshore and Polar Engineer Conference, Breat, France, 30 May–4 June 1999. [Google Scholar]
- Yamada, H.; Chigisaki, S.; Mori, M.; Takita, K.; Ogami, K.; Hirose, S. Development of Amphibious Snake-Like Robot ACM-R5. In Proceedings of the 36th International Symposium on Robotics, Tokyo, Japan, 29 November–1 December 2005. [Google Scholar]
- Liljeback, P.; Stavdahl, Ø.; Pettersen, K.; Gravdahl, J. Mamba-A Waterproof Snake Robot with Tactile Sensing. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014; pp. 294–301. [Google Scholar]
- Hirose, S. Biologically Inspired Robot; Oxford University Press: Oxford, UK, 1993; pp. 1395–1422. [Google Scholar]
- Li, D.; Wang, C.; Deng, H.; Wei, Y.; Dongfang, L.; Chao, W.; Hongbin, D. Motion Planning Algorithm of a Multi-Joint Snake-Like Robot Based on Improved Serpenoid Curve. IEEE Access 2020, 8, 8346–8360. [Google Scholar] [CrossRef]
- Niu, X.L.; Xu, J.X. Modeling, Control, and Locomotion Planning of an Anguilliform Robotic Fish. Unmanned Syst. 2014, 2, 295–321. [Google Scholar] [CrossRef]
- Kelasidi, E.; Pettersen, K.Y.; Gravdahl, J.T.; Liljeback, P. Modeling of Underwater Snake Robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4540–4547. [Google Scholar]
- Melsaac, K.; Ostrowski, J.A. Geometric Approach to Anguilliform Locomotion: Modeling of an Underwater Eel Robot. In Proceedings of the International Conference on Robotics and Automation (ICRA), Detroit, MI, USA, 10–15 May 1999; Volume 4, pp. 2843–2848. [Google Scholar]
- Wiens, A.; Nahon, M. Optimally Efficient Swimming in Hyper-Redundant Mechanisms: Control, Design, and Energy Recovery. Bioinspiration Biomim. 2012, 7, 046016. [Google Scholar] [CrossRef] [PubMed]
- Denavit, J.; Hartenberg, R.S. A Kinematic Notation for Lower-Pair Mechanisms. Am. Math. Soc. 1955, 22, 215–221. [Google Scholar]
- Zuo, X.; Tang, J.; Tian, M.; Wang, X. A Design of a Snake Robot Inspired by Waterbomb Origami. In Proceedings of the 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO), Xishuangbanna, China, 5–9 December 2022. [Google Scholar]
- Liljeback, P.; Haugstuen, I.U.; Pettersen, K.Y. Path Following Control of Planar Snake Robots Using a Cascaded Approach. IEEE Trans. Control Syst. Technol. 2011, 20, 111–126. [Google Scholar] [CrossRef] [Green Version]
- Kohl, A.M.; Pettersen, K.Y.; Kelasidi, E.; Gravdahl, J.T. Analysis of Underwater Snake Robot Locomotion Based on a Control-Oriented Model. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Zhuhai, China, 6–9 December 2015; pp. 1930–1937. [Google Scholar]
- Kohl, A.M.; Pettersen, K.Y.; Kelasidi, E.; Gravdahl, J.T. Planar Path Following of Underwater Snake Robots in the Presence of Ocean Currents. IEEE Robot. Autom. Lett. 2016, 1, 383–390. [Google Scholar] [CrossRef] [Green Version]
- Jiang, X.; Yang, F.; Shi, S. Design and full-link trajectory tracking control of underwater snake robot with ve-ctor thrusters under strong time-varying disturbances. Ocean Eng. 2022, 266, 113012. [Google Scholar] [CrossRef]
- Man, Z.; Xing, H. Terminal sliding mode control of MIMO linear systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1997, 44, 1065–1070. [Google Scholar]
- Taha, E.; Zribi, M.; Toumi, K.Y. Terminal sliding mode control for the trajectory tracking of underactuated autonomous underwater vehicles. Ocean Eng. 2017, 129, 613–625. [Google Scholar]
- McIsaac, K.; Ostrowski, J. Motion Planning for Anguilliform Locomotion. IEEE Trans. Robot. Autom. 2003, 19, 637–652. [Google Scholar] [CrossRef]
- Kelasidi, E.; Pettersen, K.Y.; Liljeback, P.; Gravdahl, J.T. Integral Line-of-Sight for Path-Following of Underwater Snake Robots. In Proceedings of the IEEE Multi-Conference on Systems and Control, Juan Les Antibes, France, 8–10 October 2014; pp. 1078–1085. [Google Scholar]
- Lekkas, A.; Fossen, T.I. Integral LOS Path Following for curved Paths Based on a Monotone Cubic Hermite Spline Parametrization. IEEE Trans. Control Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Borhaug, E.; Pavlov, A.; Pettersen, K.Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents. In Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 4984–4991. [Google Scholar]
- Kelasidi, E.; Liljeback, P.; Pettersen, K.Y.; Gravdahl, J.T. Integral Line-of-Sight Guidance for Path Following Control of Underwater Snake Robots: Theory and Experiments. IEEE Trans. Robot. 2017, 33, 656–671. [Google Scholar] [CrossRef] [Green Version]
- Liljeback, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. Snake Robots: Modelling, Mechatronics, and Control. In Advances in Industrial Control; Springer: London, UK, 2013. [Google Scholar]
- Guo, J. A waypoint-tracking controller for a biomimetic autonomous underwater vehicle. Ocean Eng. 2006, 33, 2369–2380. [Google Scholar] [CrossRef]
- Kelasidi, E.; Pettersen, K.Y.; Gravdahl, J.T. A waypoint guidance strategy for underwater snake robots. In Proceedings of the IEEE 22nd Mediterranean Conference on Control and Automation, Palermo, Italy, 16–19 June 2014; pp. 1512–1519. [Google Scholar]
- Madhavan, S.; Antonios, T.; Brian, W.; Rafa, B. Co-operative path planning of multiple UAVs using Dubins paths with clothoid arcs. Control Eng. Pract. 2010, 18, 1084–1092. [Google Scholar]
- Tian, L.; Collins, C. An effective robot trajectory planning method using a genetic algorithm. Mechatronics 2004, 14, 455–470. [Google Scholar] [CrossRef]
- Ariizumi, R.; Matsuno, F. Dynamic Analysis of Three Snake Robot Gaits. IEEE Trans. Robot. 2017, 33, 1075–1087. [Google Scholar] [CrossRef]
- Cao, Z.; Zhang, D.; Hu, B.; Liu, J. Adaptive Path Following and Locomotion Optimization of Snake-Like Robot Controlled by the Central Pattern Generator. Complexity 2019, 2019, 8030374. [Google Scholar] [CrossRef] [Green Version]
- Kelasidi, E.; Jesmani, M.; Pettersen, K.Y.; Gravdahl, J.T. Multi-objective Optimization for the Efficient Movement of Underwater Snake Robots. Artif. Life Robot. 2016, 21, 411–422. [Google Scholar] [CrossRef] [Green Version]
- Dewangan, D.K.; Sahu, S.P. Optimized Convolutional Neural Network for Road Detection with Structured Contour and Spatial Information for Intelligent Vehicle System. Int. J. Pattern Recognit. Artif. Intell. 2022, 36, 2252002. [Google Scholar] [CrossRef]
- Dewangan, D.K.; Sahu, S.P. Lane detection in intelligent vehicle system using optimal 2-tier deep convolutional neural network. Multimed. Tools Appl. 2022, 82, 7293–7317. [Google Scholar] [CrossRef]
- Xu, B.; Jiao, M.; Zhang, X.; Zhang, D. Path Tracking of an Underwater Snake Robot and Locomotion Efficiency Optimization Based on Improved Pigeon-Inspired Algorithm. J. Mar. Sci. Eng. 2022, 10, 47. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A Novel Swarm Intelligence Optimization Approach: Sparrow Search Algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Lyu, X.; Mu, X.; Zahng, J.; Wang, Z. Chaos Sparrow Search Optimization Algorithm. J. Beijing Univ. Aeronaut. Astronaut. 2021, 47, 1712. [Google Scholar] [CrossRef]
- Kelasidi, E.; Pettersen, K.Y.; Gravdahl, J.T. A Control-Oriented Model of Underwater Snake Robots. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; IEEE: New York, NY, USA, 2014; pp. 1610–1615. [Google Scholar] [CrossRef] [Green Version]
- Kelasidi, E.; Liljebäck, P.; Pettersen, K.Y.; Gravdahl, J.T. Experimental Investigation of Efficient Locomotion of Underwater Snake Robots for Lateral Undulation and Eel-Like Motion Patterns. Robotics and Biomimetics. Robot. Biomim. 2015, 2, 8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arora, S.; Anand, P. Chaotic grasshopper optimization algorithm for global optimization. Neural Comput. Appl. 2018, 31, 4385–4405. [Google Scholar] [CrossRef]
- Tang, A.; Han, T.; Xu, D.; Xie, L. Path planning method of the unmanned aerial vehicle based on chaos sparrow search algorithm. J. Comput. Appl. 2021, 41, 2128–2136. [Google Scholar]
- Shan, L.; Qiang, H.; Li, J.; Wang, Z. Chaotic optimization algorithm based on Tent map. Control Decis. 2005, 20, 179–182. [Google Scholar]
- Zhang, D.M.; Xu, H.; Wang, Y.R.; Song, T.; Wang, L. Whale optimization algorithm for embedded circle mapping and one-dimensional oppositional learning based small hole imaging. Control Decis. 2021, 36, 1173–1182. [Google Scholar]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Duan, H.; Qiao, P. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning. Int. J. Intell. Comput. Cybern. 2014, 7, 24–37. [Google Scholar] [CrossRef]
- Kennedy, J. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Symbol | Description |
|---|---|---|---|
| Normal displacement between adjacent connecting rods | Number of connecting rods | ||
| Reference normal displacement between adjacent connecting rods | Number of path points | ||
| Joint displacement | Summation vector | ||
| Normal velocity between adjacent connecting rods | Fluid force coefficient | ||
| Normal acceleration between adjacent connecting rods | The directional angle of sea currents | ||
| Robot heading angle | Path tangent angle | ||
| Robot reference heading angle | Path tracking error | ||
| Robot deflection angular speed | Serpentine curve amplitude | ||
| Angular acceleration of robot deflection | Serpentine curve phase shift | ||
| Joint drive force/torque | Serpentine curve angular frequency | ||
| Robot center-of-mass coordinates | Location of path points | ||
| Robot tangential speed | Path variables | ||
| Robot tangential acceleration | Path point variables | ||
| The relative tangential velocity of the robot | Sliding mold surface | ||
| Robot normal velocity | Polynomial coefficients | ||
| Robot normal acceleration | Forward-head distance | ||
| The relative normal velocity of the robot | The integral role of ILOS | ||
| Currents speed | The integral gain of ILOS | ||
| Current velocity along the x-axis | Joint phase shift rate of change coefficient | ||
| Current velocity along the y-axis | Sliding mode convergence law coefficient | ||
| Tangential friction coefficient | Sliding mode surface coefficient | ||
| Normal friction coefficient | Sliding surface coefficient, positive prime, 2q > p > q | ||
| Propulsion coefficient | The current speed of the robot | ||
| Single linkage mass | The position of a point on the design path | ||
| Column vector consisting of the mass of the connecting rod | Virtual particle velocity component | ||
| Half the length of a single connecting rod | Virtual particle position |
| Test Function | Expressions | Definition Domain | Optimal Solution | Global Minimum |
|---|---|---|---|---|
| Ackley | [−40, 40] | (0, 0) | 0 | |
| Griewank | [−600, 600] | (multi-extreme-points) | 0 | |
| Rosenbrock | [−100, 100] | (1, 1) | 0 |
| Algorithm | Mean | Max | Min | SD | |
|---|---|---|---|---|---|
| Algorithm | 2.556 | 3.366 | 2.540 | 0.013 | Efficiency |
| SSA | 2.776 | 3.951 | 2.611 | 0.085 | |
| QPIO | 9.923 | 30.558 | 9.462 | 5.193 | |
| PIO | 1.16 × 102 | 1.16 × 102 | 1.16 × 102 | 5.05 × 10−27 | |
| PSO | 10.399 | 34.550 | 8.909 | 19.574 | |
| Algorithm | Mean | Max | Min | SD | |
| MISSA | 0.076 | 7.599 | 8.88 × 10−16 | 0.572 | F1.Ackley |
| SSA | 0.198 | 11.125 | 8.88 × 10−16 | 1.958 | |
| QPIO | 0.570 | 10.952 | 2.35 × 10−10 | 1.650 | |
| PIO | 0.812 | 9.127 | 4.75 × 10−1 | 1.239 | |
| PSO | 1.157 | 13.753 | 2.93 × 10−4 | 7.984 | |
| Algorithm | Mean | Max | Min | SD | |
| MISSA | 1.014 | 1.787 | 8.8 × 10−16 | 0.019 | F2.Griewank |
| SSA | 1.132 | 3.456 | 8.8 × 10−16 | 0.569 | |
| QPIO | 1.011 | 1.372 | 1.4 × 10−4 | 0.003 | |
| PIO | 1.008 | 1.632 | 0.002 | 0.002 | |
| PSO | 1.609 | 21.576 | 0.004 | 8.977 | |
| Algorithm | Mean | Max | Min | SD | |
| MISSA | 8.170 | 4.28 × 102 | 0.014 | 2.78 × 103 | F3.Rosenbrock |
| SSA | 4.281 | 1.04 × 102 | 1.752 | 1.88 × 102 | |
| QPIO | 5.836 | 7.20 × 102 | 0.155 | 2.72 × 103 | |
| PIO | 1.421 | 1.93 × 102 | 0.283 | 1.85 × 102 | |
| PSO | 17.030 | 1.30 × 103 | 0.052 | 1.70 × 104 |
| MAD | Large Turning Curve Path | Continuous Turning Curve Path |
|---|---|---|
| Adaptive Δ | 0.0121 | 0.0144 |
| Constant Δ | 0.0227 | 0.0282 |
| MISSA | SSA | QPIO | PIO | PSO | |
|---|---|---|---|---|---|
| MAD | 0.0166 | 0.0173 | 0.0218 | 0.0222 | 0.0171 |
| MISSA | SSA | QPIO | PIO | PSO | |
|---|---|---|---|---|---|
| MAD | 0.0289 | 0.0319 | 0.0472 | 0.0408 | 0.0686 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Zhu, H.; Chen, Y.; Bao, H. Path Following of an Underwater Snake-like Robot Exposed to Ocean Currents and Locomotion Efficiency Optimization Based on Multi-Strategy Improved Sparrow Search Algorithm. J. Mar. Sci. Eng. 2023, 11, 1236. https://doi.org/10.3390/jmse11061236
Liu J, Zhu H, Chen Y, Bao H. Path Following of an Underwater Snake-like Robot Exposed to Ocean Currents and Locomotion Efficiency Optimization Based on Multi-Strategy Improved Sparrow Search Algorithm. Journal of Marine Science and Engineering. 2023; 11(6):1236. https://doi.org/10.3390/jmse11061236
Chicago/Turabian StyleLiu, Jing, Haitao Zhu, Yan Chen, and Han Bao. 2023. "Path Following of an Underwater Snake-like Robot Exposed to Ocean Currents and Locomotion Efficiency Optimization Based on Multi-Strategy Improved Sparrow Search Algorithm" Journal of Marine Science and Engineering 11, no. 6: 1236. https://doi.org/10.3390/jmse11061236