


Inland Vessel Travel Time Prediction via a Context-Aware Deep Learning Model

Abstract
:1. Introduction
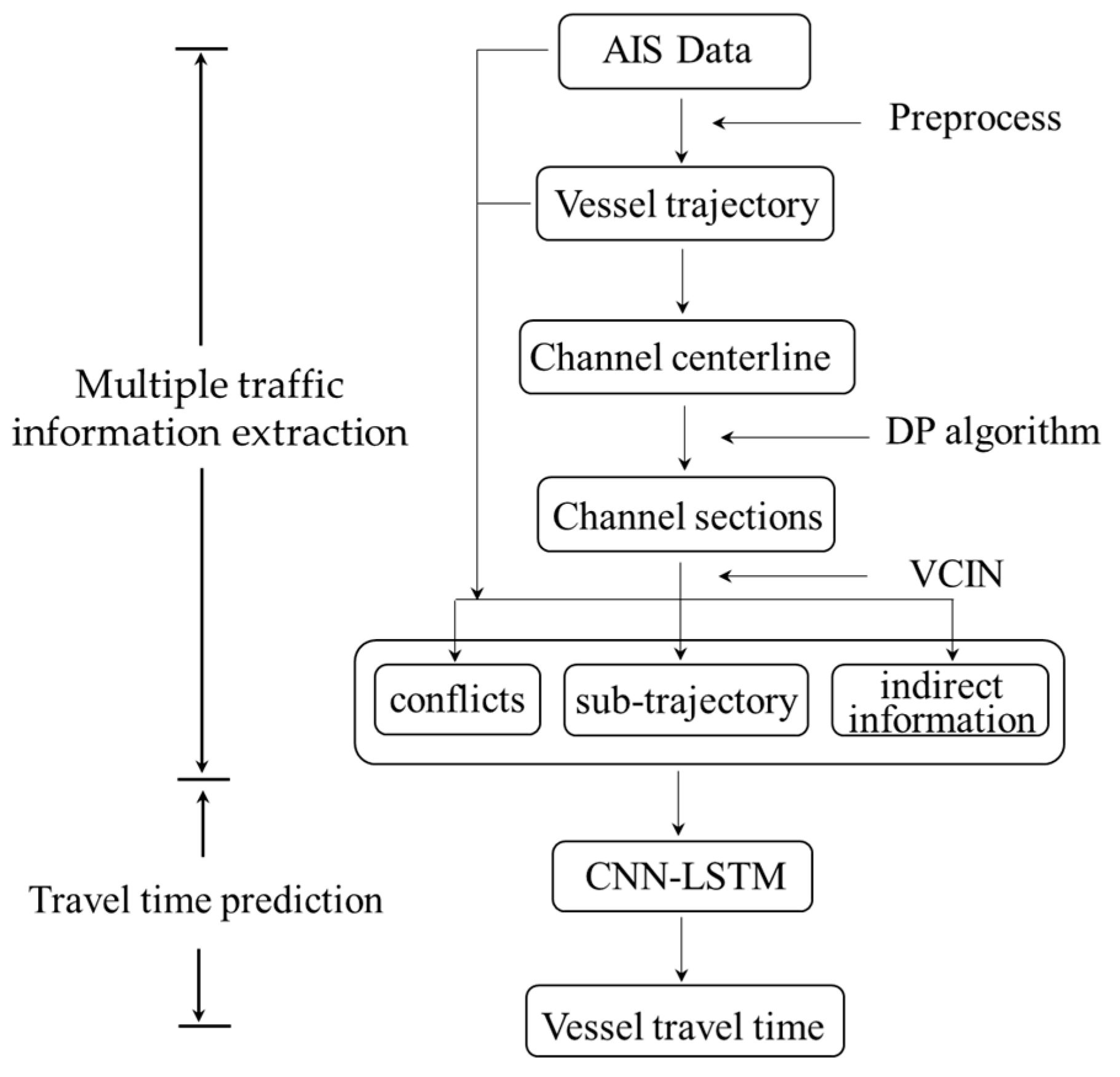
2. Multiple Traffic Information Extraction
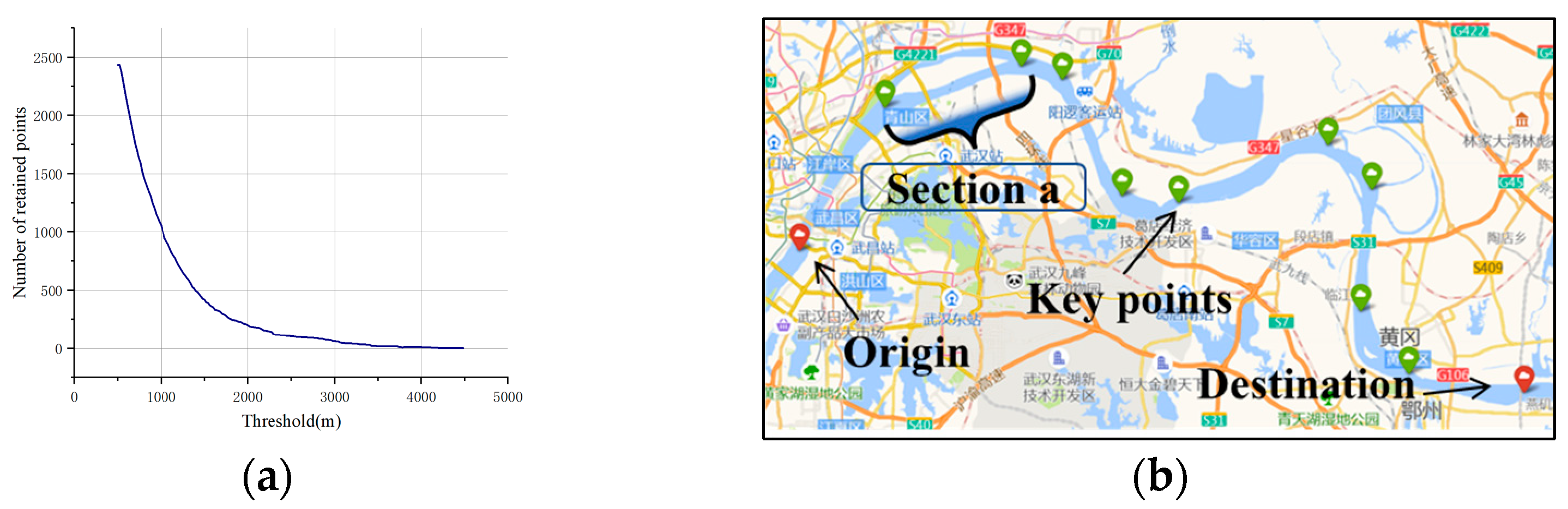
2.1. Channel Section Division and Sub-Trajectory Extraction
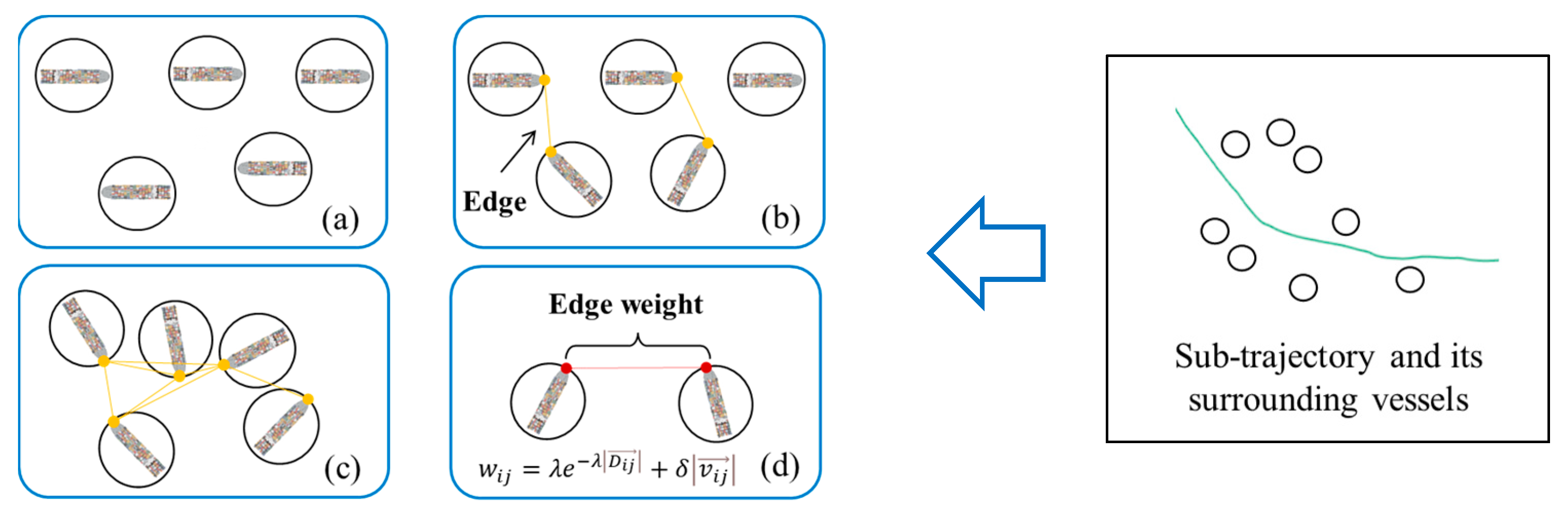
2.2. Traffic Context Extraction of Sub-Trajectory
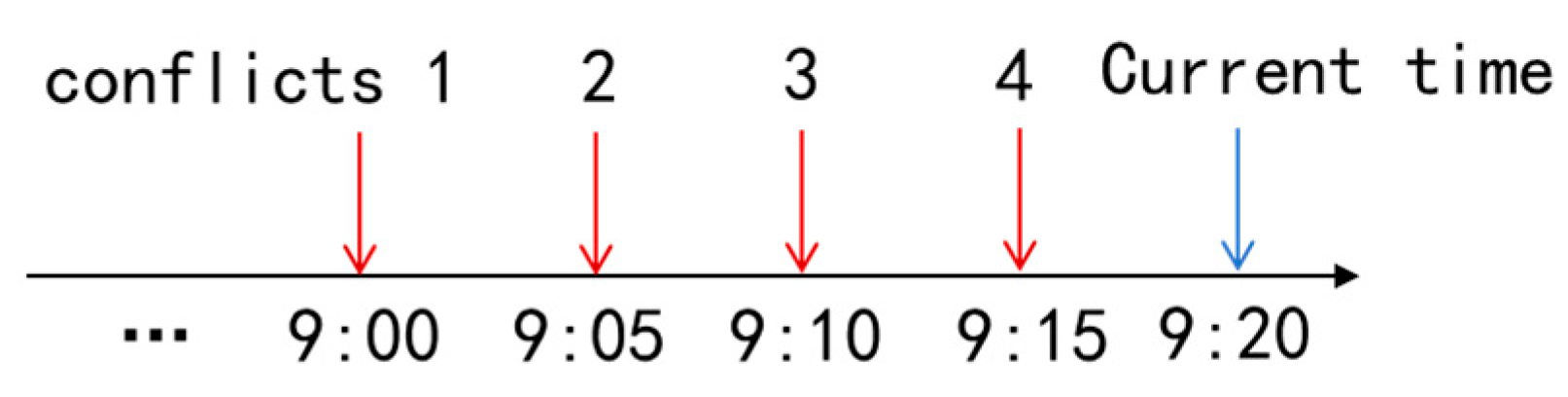
2.2.1. Interaction Information Extraction
2.2.2. Indirect Information Extraction
3. Vessel Travel Time Prediction Model
4. Experiments
4.1. Resutls Regarding Channel Sections and Sub-Trajectries
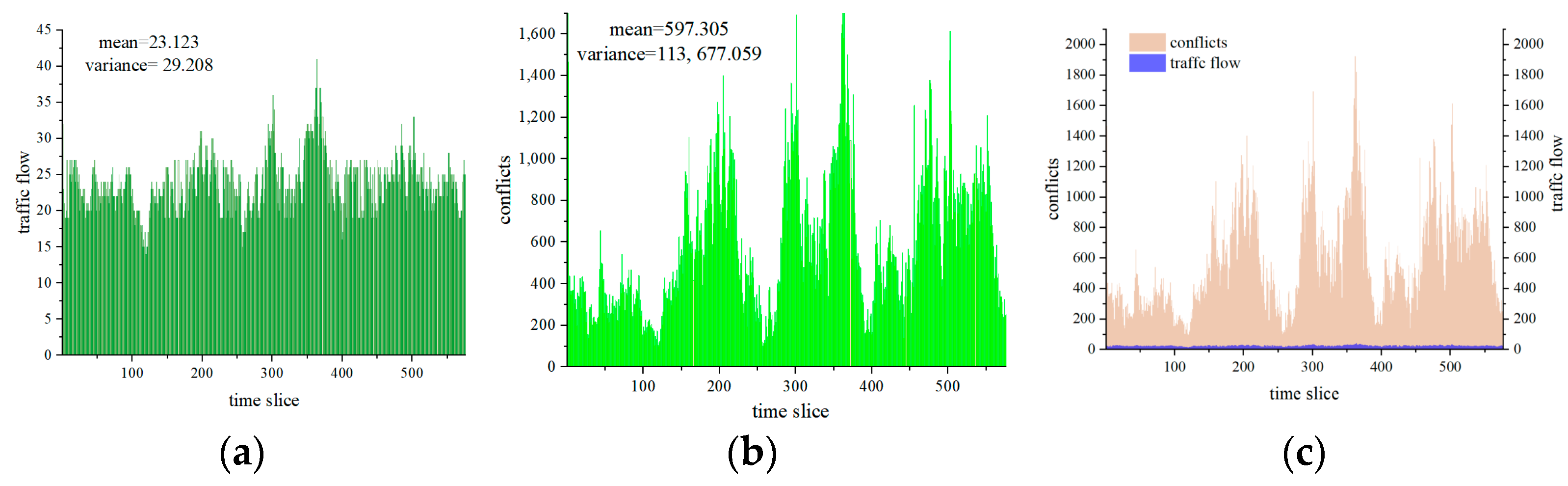
4.2. Analysis of Traffic Interactions Context
4.3. Travel Time Prediction Experiment
4.3.1. Training of TTP-MTI
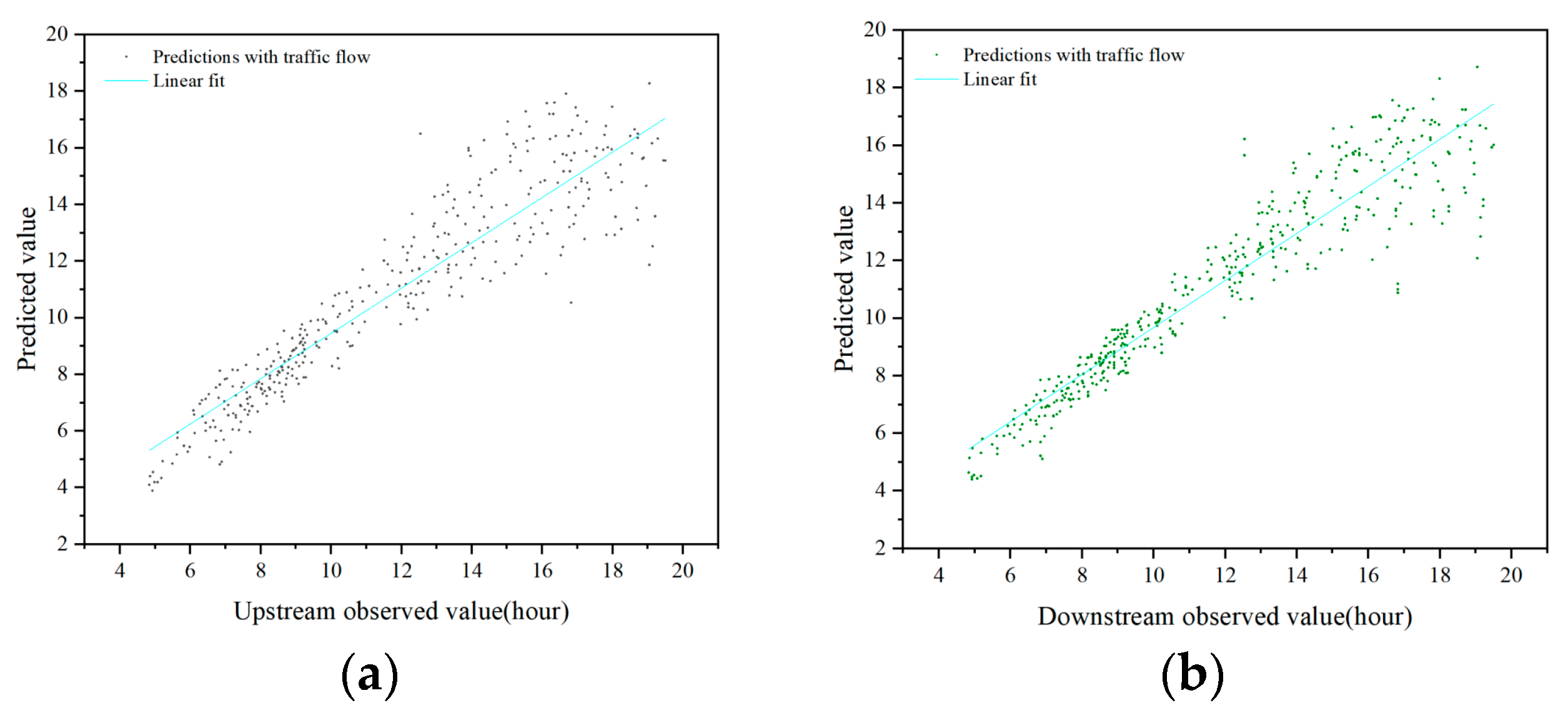
4.3.2. Travel Time Prediction Results
4.4. Comparison Experiment
4.5. Ablation Experiment
- M1 excludes vessel type, size, and power information, assuming all vessels are of the same type without incorporating additional distinguishing features;
- M2 excludes traffic interaction context information;
- M3 excludes date information in inputs;
- M4 only inputs the trajectory without the convolution process, leading to some redundant trajectory characteristics in the model.
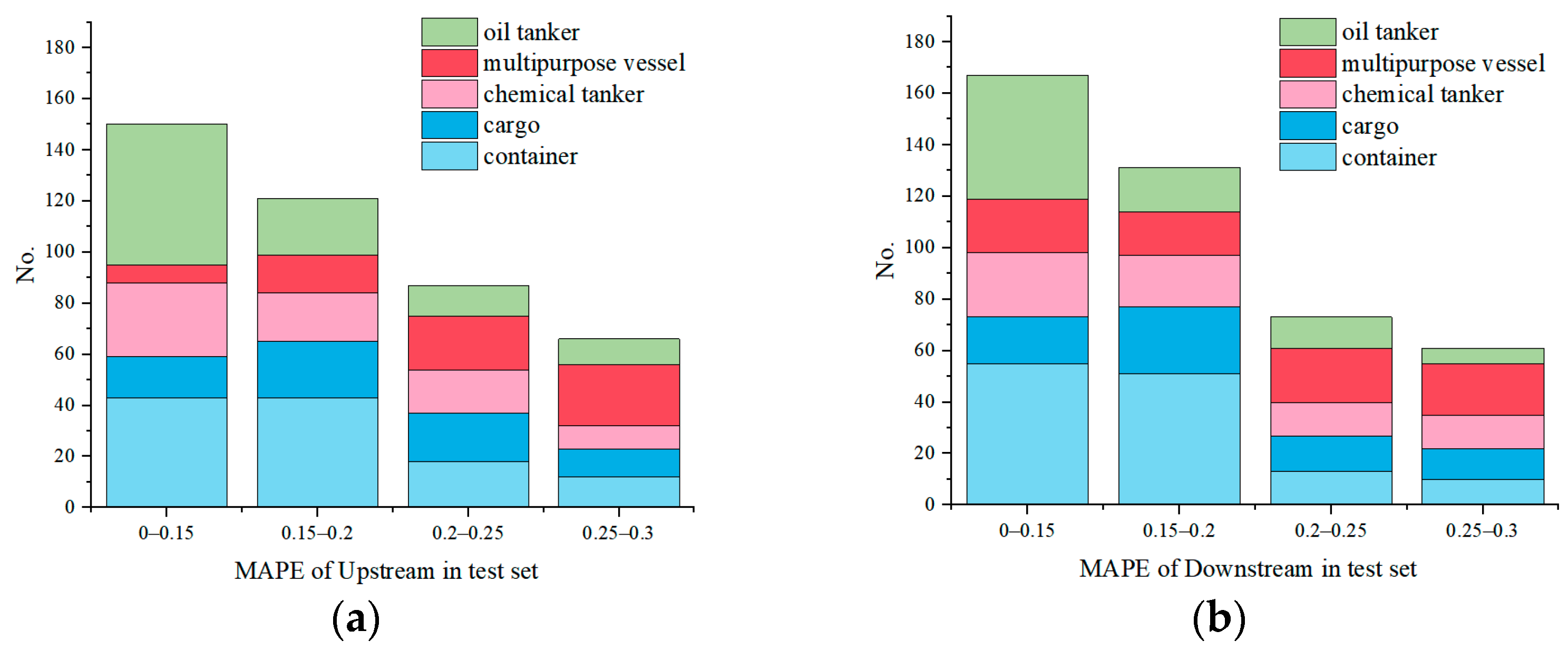
4.6. Error Distribution of Different Types of Vessels
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fancello, G.; Pani, C.; Pisano, M.; Serra, P.; Zuddas, P.; Fadda, P. Prediction of arrival times and human resources allocation for container terminal. Marit. Econ. Logist. 2011, 13, 142–173. [Google Scholar] [CrossRef]
- Wu, X.; Roy, U.; Hamidi, M.; Brian, N. Estimate travel time of ships in narrow channel based on AIS data. Ocean Eng. 2020, 202, 106790. [Google Scholar] [CrossRef]
- Alessandrini, A.; Mazzarella, F.; Vespe, M. Estimated Time of Arrival Using Historical Vessel Tracking Data. IEEE Trans. Intell. Transp. Syst. 2019, 20, 7–15. [Google Scholar] [CrossRef]
- Park, K.; Sim, S.; Bae, H. Vessel estimated time of arrival prediction system based on a path-finding algorithm. Marit. Transp. Res. 2021, 2, 100012. [Google Scholar] [CrossRef]
- Yu, J.J.; Tang, G.L.; Song, X.Q.; Yu, X.; Qi, Y.; Li, D.; Zhang, Y. Ship arrival prediction and its value on daily container terminal operation. Ocean Eng. 2018, 157, 73–86. [Google Scholar] [CrossRef]
- Xu, X.; Liu, C.; Li, J.; Miao, Y. Trajectory clustering for SVR-based Time of Arrival estimation. Ocean Eng. 2022, 259, 111930. [Google Scholar] [CrossRef]
- Sheng, Z.; Lv, Z.Q.; Li, J.B.; Xu, Z.H.; Sun, H.K.; Liu, X.; Ye, R.K. Taxi travel time prediction based on fusion of traffic condition features. Comput. Electr. Eng. 2023, 105, 108530. [Google Scholar] [CrossRef]
- Peng, C.; Ding, C.; Lu, G.; Wang, Y. Short-Term Traffic States Forecasting Considering Spatial–Temporal Impact on an Urban Expressway. Transp. Res. Rec. J. Transp. Res. Board 2016, 2594, 61–72. [Google Scholar]
- Fei, X.; Lu, C.C.; Liu, K. A bayesian dynamic linear model approach for real-time short-term freeway travel time prediction. Transp. Res. Part C-Emerg. Technol. 2011, 19, 1306–1318. [Google Scholar] [CrossRef]
- Jiang, X.; Wen, X.; Wu, M.; Song, M.; Tu, C.L. A complex network analysis approach for identifying air traffic congestion based on independent component analysis. Phys. A Stat. Mech. Its Appl. 2019, 523, 364–381. [Google Scholar] [CrossRef]
- Sui, Z.; Wen, Y.; Huang, Y.; Zhou, C.; Xiao, C.; Chen, H. Empirical analysis of complex network for marine traffic situation. Ocean Eng. 2020, 214, 107848. [Google Scholar] [CrossRef]
- Houman, K.; Mobin, G.N.; Abbas, S.; Mohammad, K.; Mokhtar, M. Feature Selection and Training Multilayer Perceptron Neural Networks Using Grasshopper Optimization Algorithm for Design Optimal Classifier of Big Data Sonar. J. Sens. 2022, 2022, 9620555. [Google Scholar]
- Sun, J.; Kim, J. Joint prediction of next location and travel time from urban vehicle trajectories using long short-term memory neural networks. Transp. Res. Part C. 2021, 128, 103114. [Google Scholar] [CrossRef]
- Rong, H.; Teixeira, A.P.; Guedes, S.C. Data mining approach to shipping route characterization and anomaly detection based on AIS data. Ocean Eng. 2020, 198, 106936. [Google Scholar] [CrossRef]
- Douglas, D.H. Algorithms for the reduction of the number of points required to represent a line or its caricature. Can. Cartogr. 1973, 10, 112–122. [Google Scholar] [CrossRef]
- Wu, B.; Yip, T.L.; Yan, X.; Soare, C.G. Review of techniques and challenges of human and organizational factors analysis in maritime transportation. Reliab. Eng. Syst. Saf. 2022, 219, 108249. [Google Scholar] [CrossRef]
- Duan, H.; Ma, F.; Miao, L.; Zhang, C. A semi-supervised deep learning approach for vessel trajectory classification based on AIS data. Ocean Coast Manag. 2022, 218, 106015. [Google Scholar] [CrossRef]
- Xu, M.; Liu, H. A flexible deep learning-aware framework for travel time prediction considering traffic event. Eng. Appl. Artif. Intell. 2021, 106, 104491. [Google Scholar] [CrossRef]
- Ma, X.; Tao, Z.; Wang, Y.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C-Emerg. Technol. 2015, 54, 187–197. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Splitting Data | Trajectory Patterns | |
|---|---|---|
| Upstream | Downstream | |
| Oil tanker | 494 | 544 |
| Cargo | 302 | 471 |
| Container | 463 | 431 |
| Chemical tanker | 210 | 202 |
| Multiple vessel | 636 | 517 |
| Total | 2105 | 2165 |
| Congestion State | Smooth | Mild Congestion | Serious Congestion |
|---|---|---|---|
| Traffic flow | 0–16 | 16–24 | >24 |
| Congestion State | Smooth | Basically Smooth | Mild Congestion | Moderate Congestion | Series Congestion |
|---|---|---|---|---|---|
| 0–183 | 183–438 | 438–811 | 811–1132 | >1132 |
| Structure | Number of Conv. Layers | Number of Nodes in Each Conv. Layer | Upstream MAE | Downstream MAE |
|---|---|---|---|---|
| A | 2 | 32-32 | 0.351 | 0.342 |
| B | 2 | 32-64 | 0.336 | 0.295 |
| C | 3 | 32-32-64 | 0.231 | 0.228 |
| D | 3 | 32-64-64 | 0.254 | 0.247 |
| E | 4 | 32-32-32-64 | 0.289 | 0.263 |
| F | 4 | 32-32-64-64 | 0.272 | 0.266 |
| Model | Upstream | Downstream | ||||
|---|---|---|---|---|---|---|
| MAE | RMSE | MAPE | MAE | RMSE | MAPE | |
| M1 | 2.2567 | 2.9831 | 0.3223 | 2.0129 | 2.7294 | 0.3116 |
| M2 | 2.1291 | 2.5784 | 0.2125 | 1.7861 | 2.5301 | 0.2084 |
| M3 | 1.9122 | 2.2084 | 0.1971 | 1.3499 | 1.9836 | 0.1782 |
| M4 | 1.9673 | 2.5562 | 0.2085 | 1.7221 | 2.5192 | 0.1943 |
| M | 0.4337 | 1.3095 | 0.1213 | 0.3894 | 1.2811 | 0.0937 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, T.; Chen, D.; Huang, C.; Tian, C.; Yan, X. Inland Vessel Travel Time Prediction via a Context-Aware Deep Learning Model. J. Mar. Sci. Eng. 2023, 11, 1146. https://doi.org/10.3390/jmse11061146
Fan T, Chen D, Huang C, Tian C, Yan X. Inland Vessel Travel Time Prediction via a Context-Aware Deep Learning Model. Journal of Marine Science and Engineering. 2023; 11(6):1146. https://doi.org/10.3390/jmse11061146
Chicago/Turabian StyleFan, Tengze, Deshan Chen, Chen Huang, Chi Tian, and Xinping Yan. 2023. "Inland Vessel Travel Time Prediction via a Context-Aware Deep Learning Model" Journal of Marine Science and Engineering 11, no. 6: 1146. https://doi.org/10.3390/jmse11061146