
Integrated Underwater Detection and Communication System Based on P4 Code-Modulated OFDM Signal


Abstract
:1. Introduction
2. P4 Code-Modulated OFDM Detection and Communication Integration Process
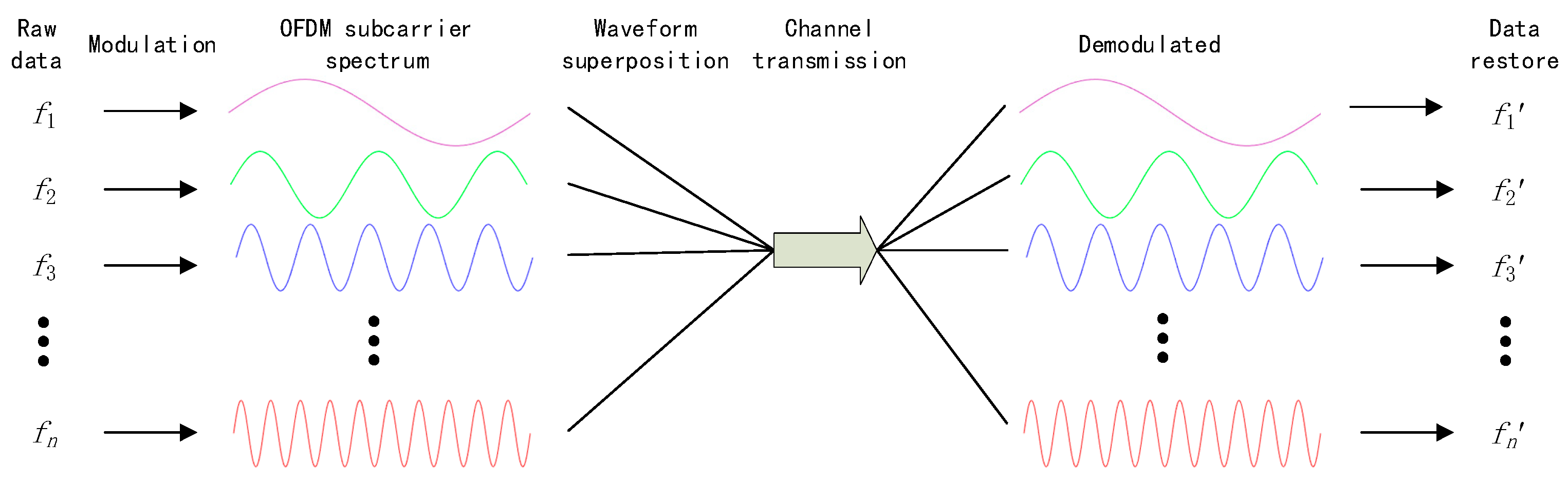
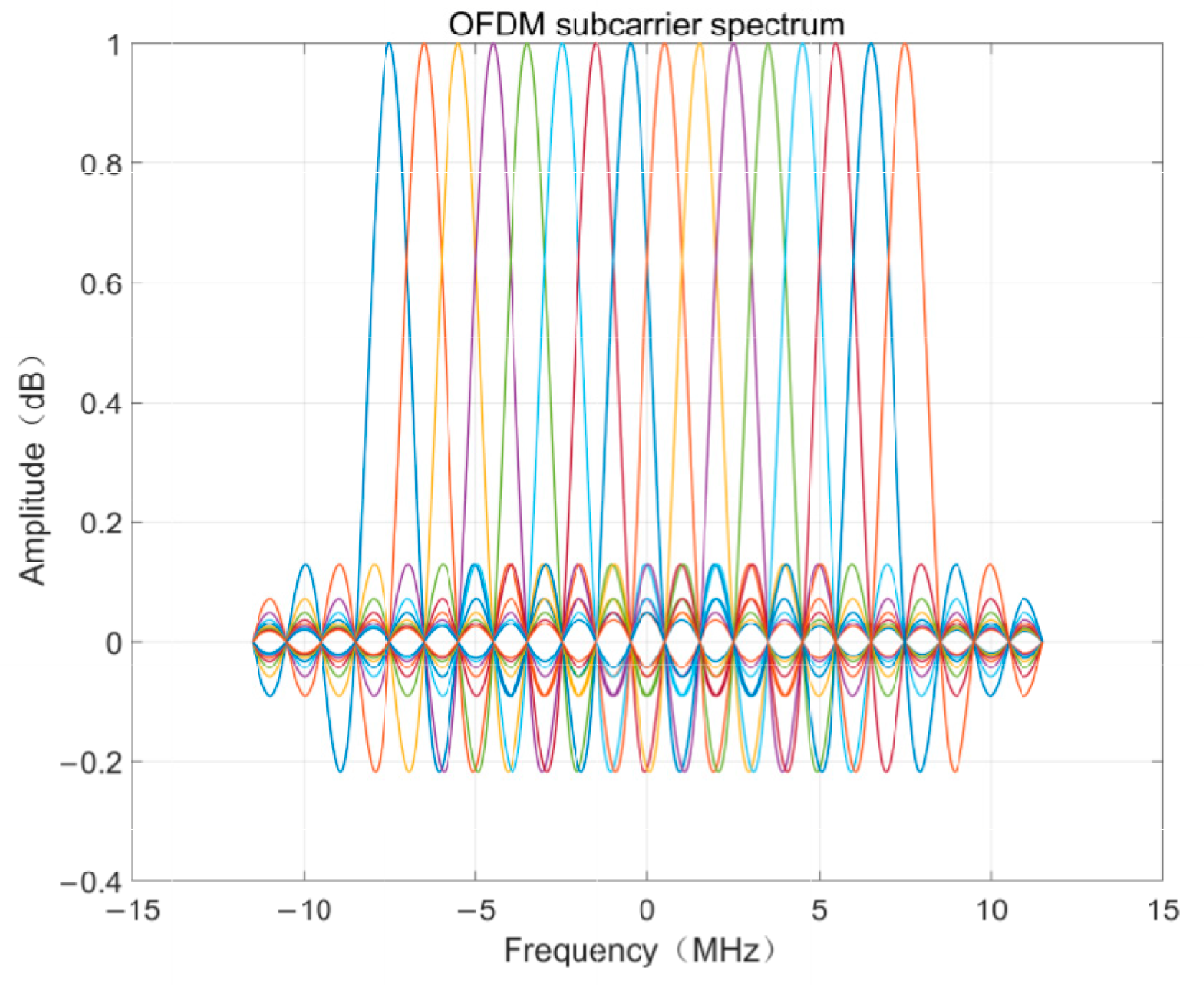
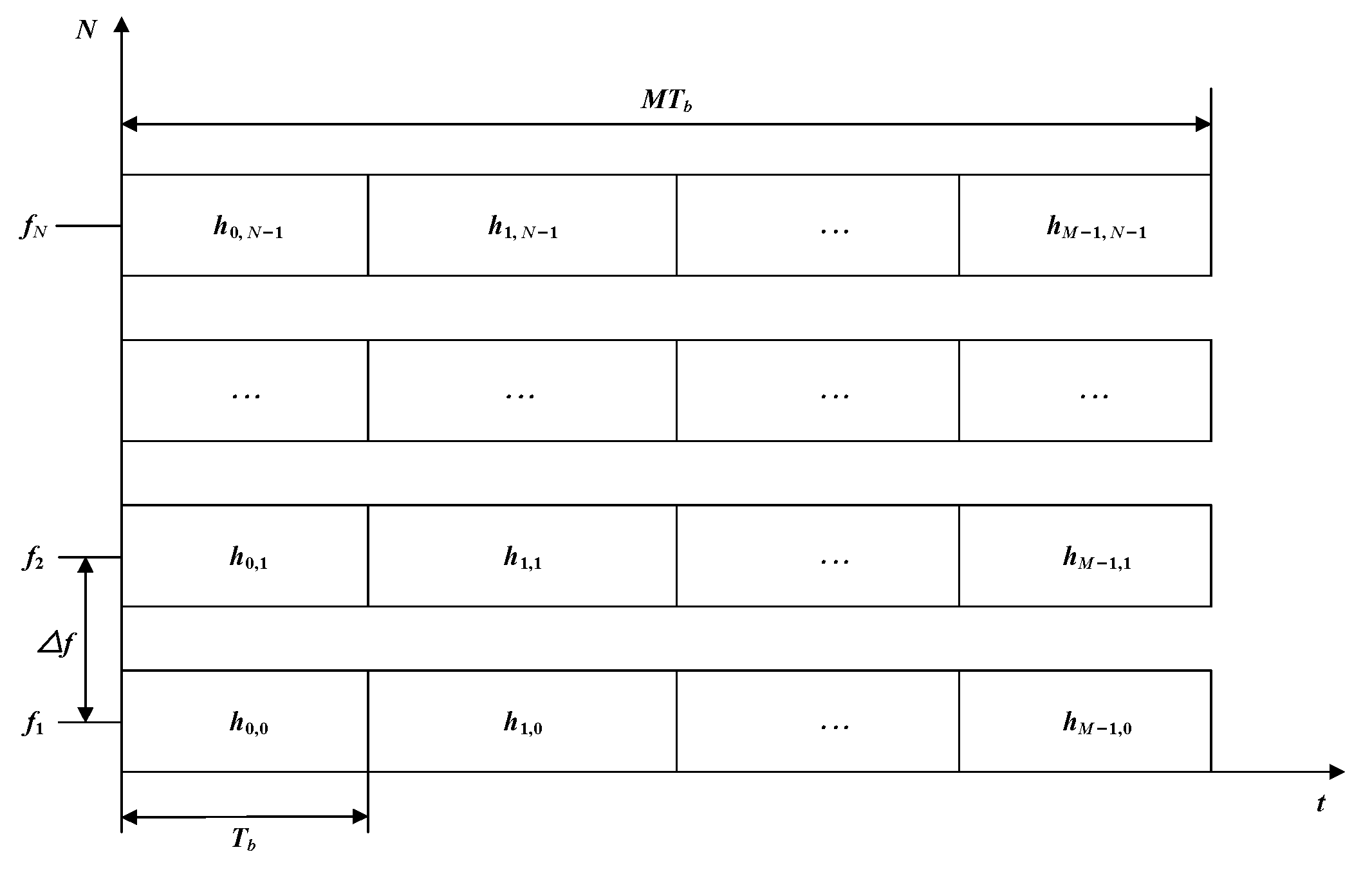
2.1. OFDM Process
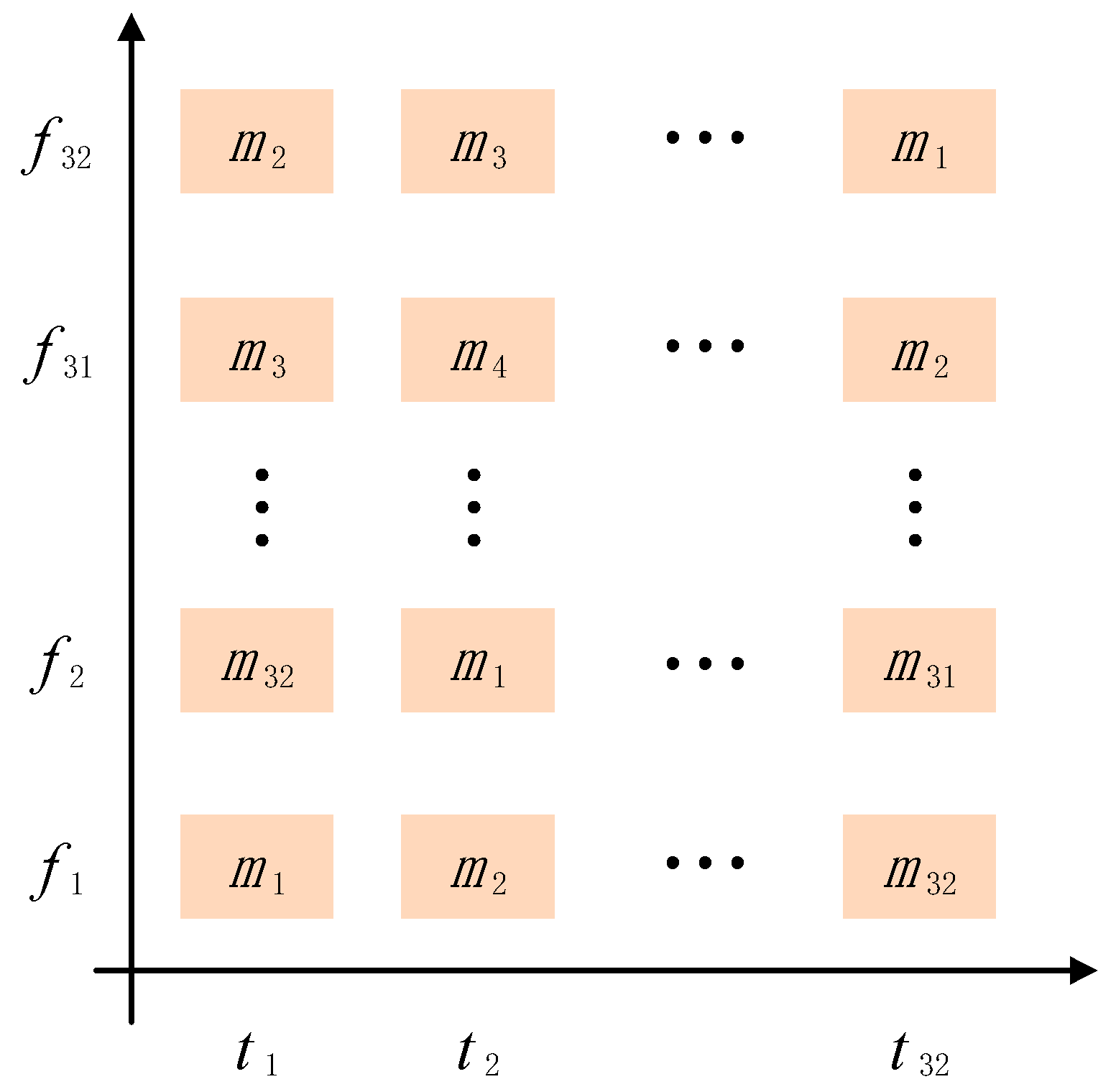
2.2. P4 Code-Modulated OFDM Signal
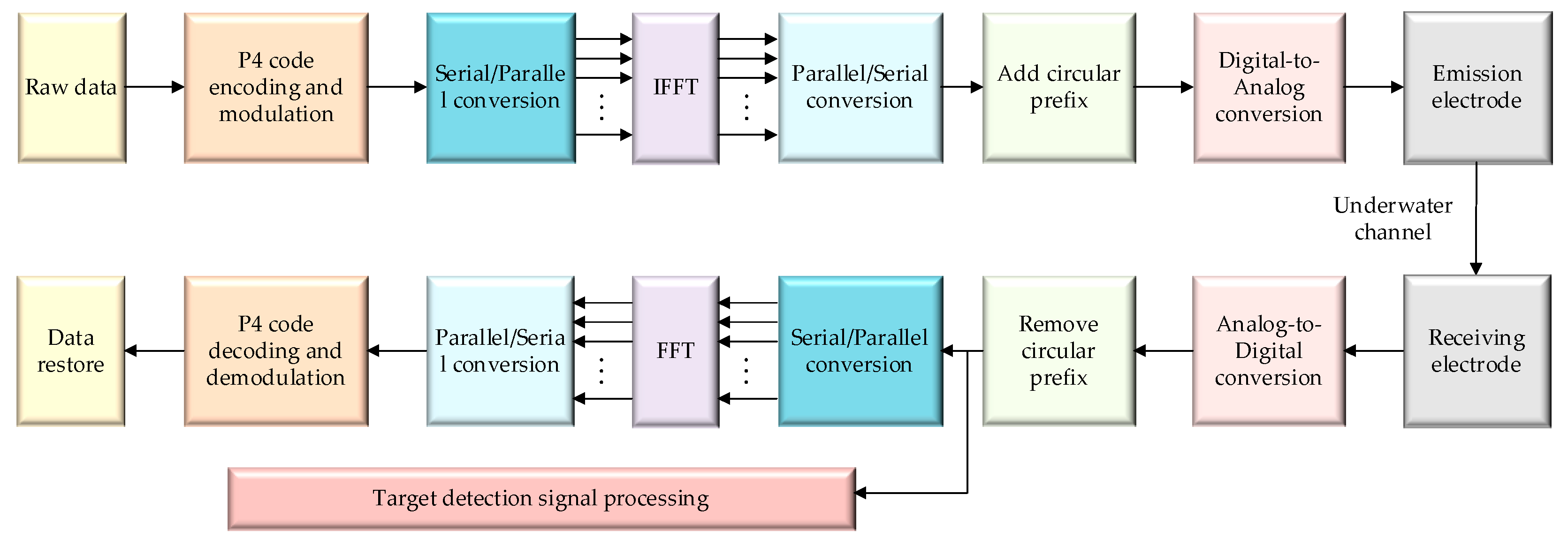
2.3. Integration Process of Detection and Communication System Based on OFDM Mechanism of P4 Code Modulation
3. Integrated Simulation of Detection and Communication
3.1. Simulation Parameter Setting
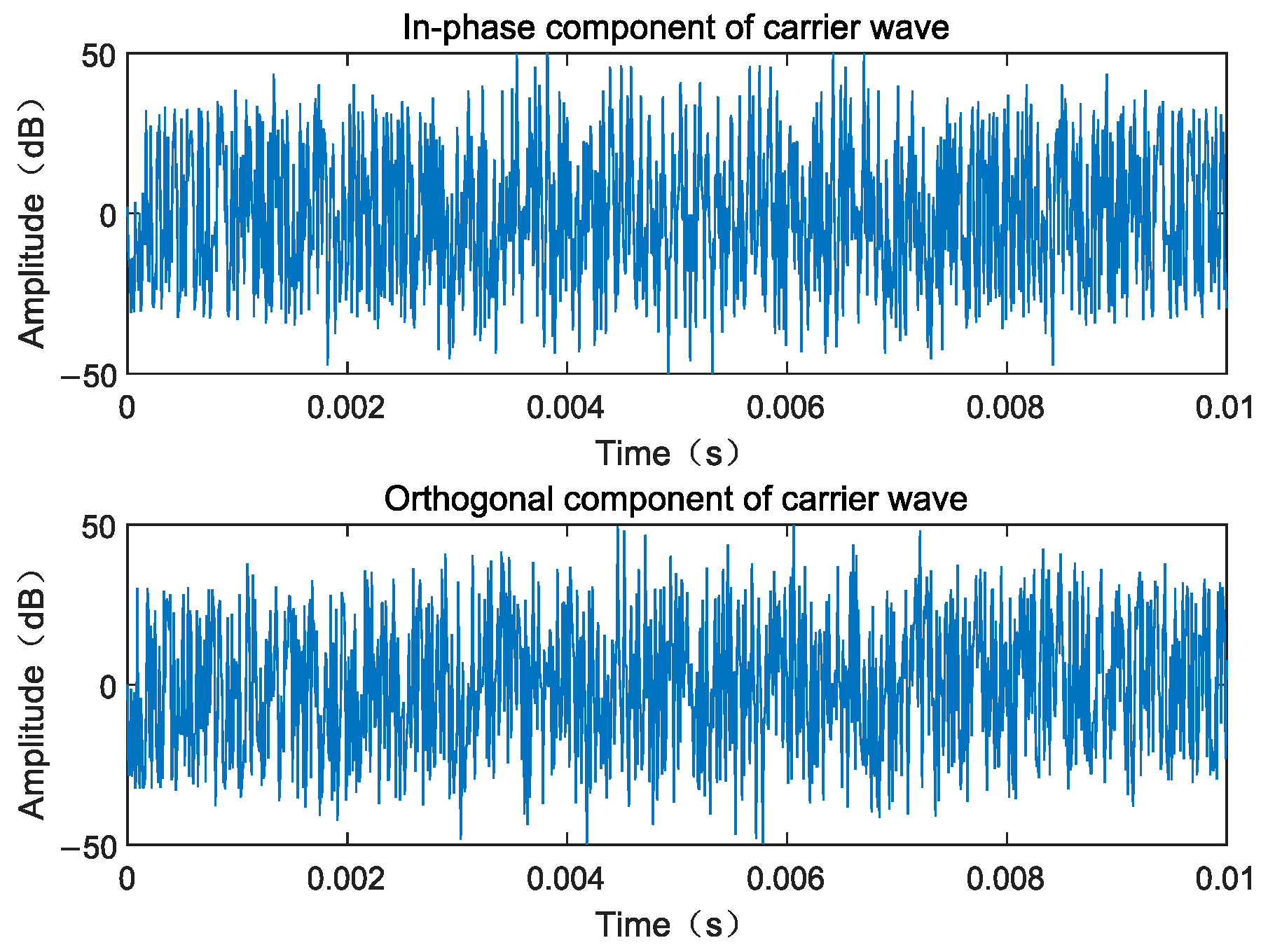
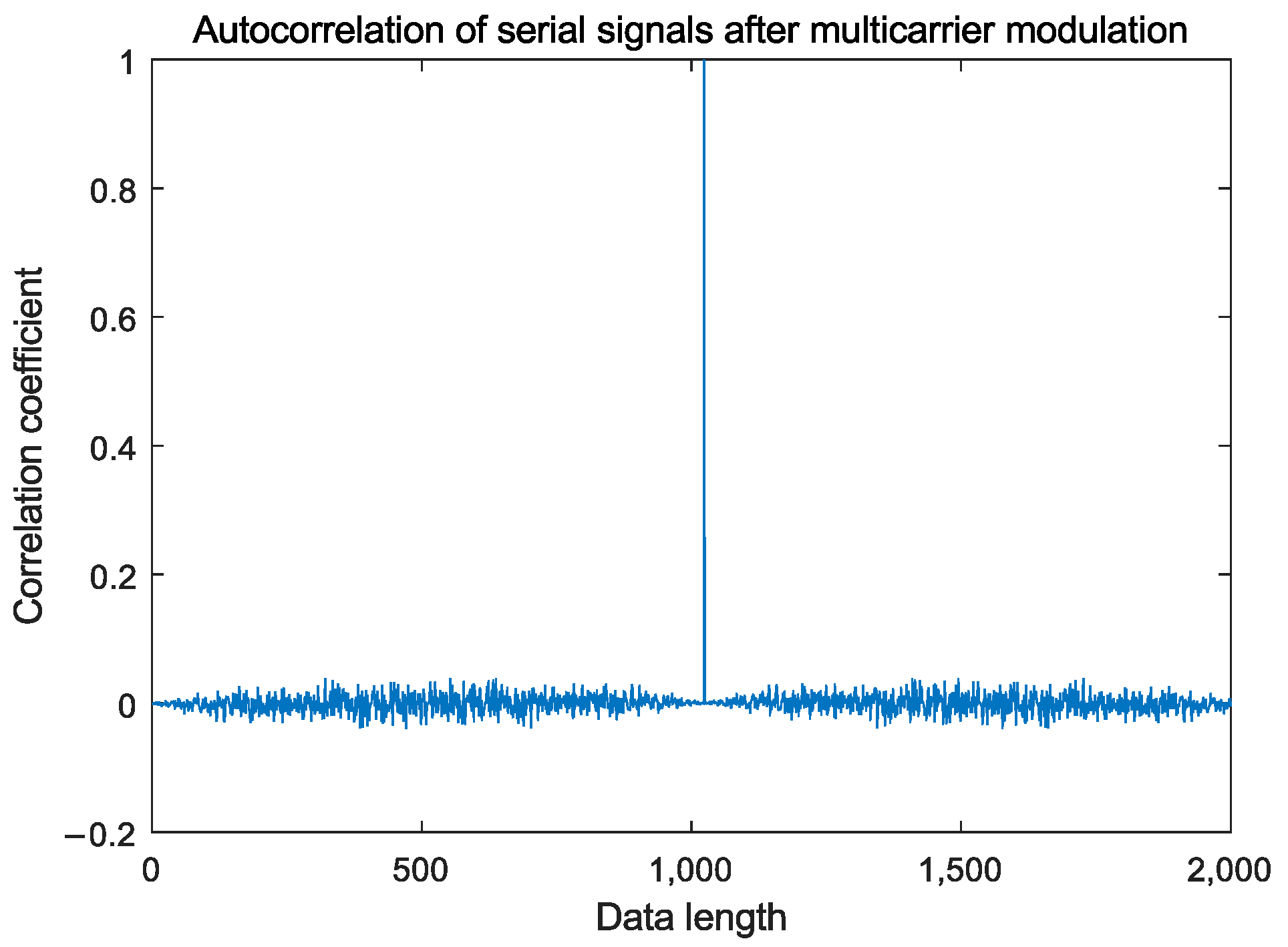
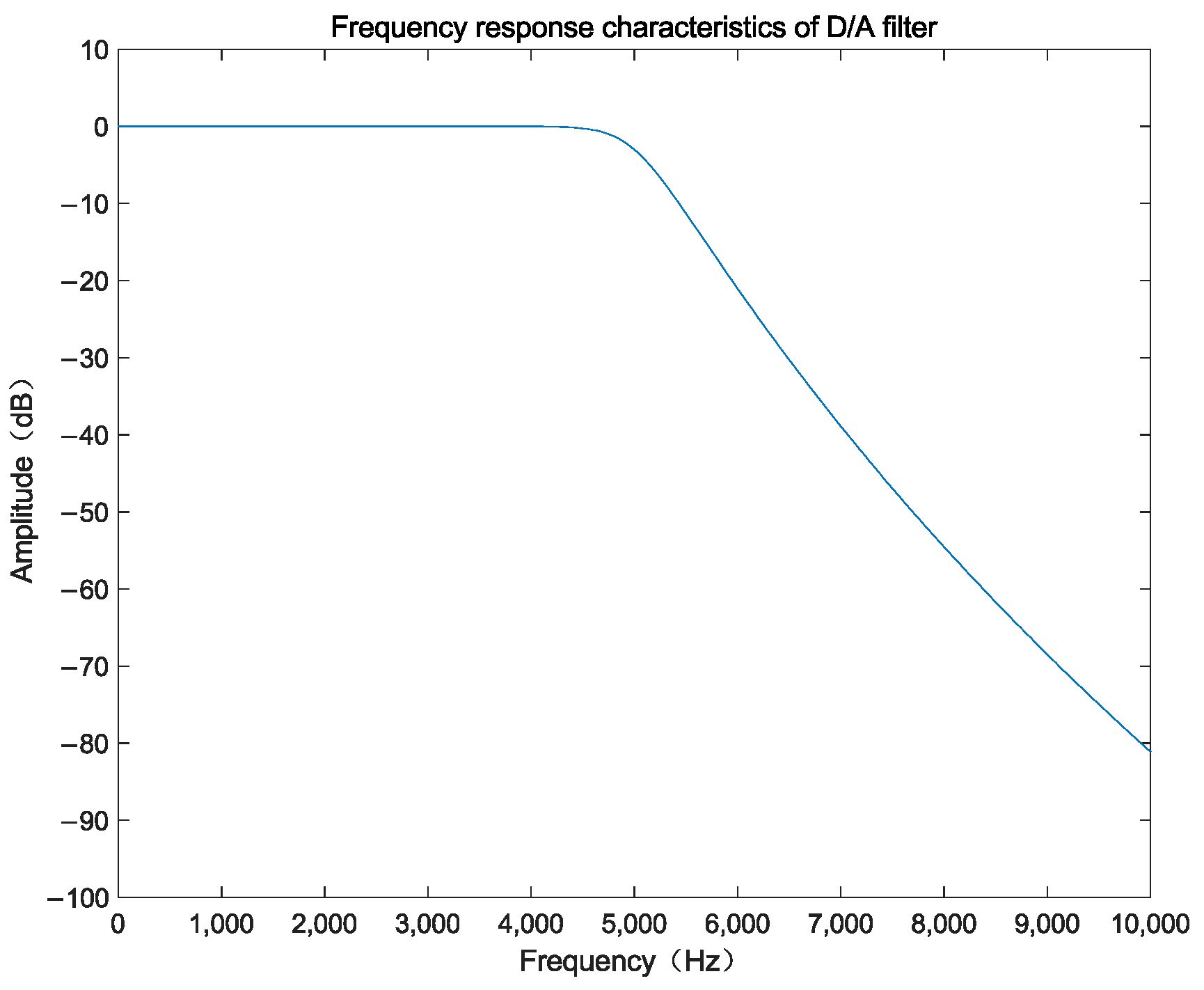
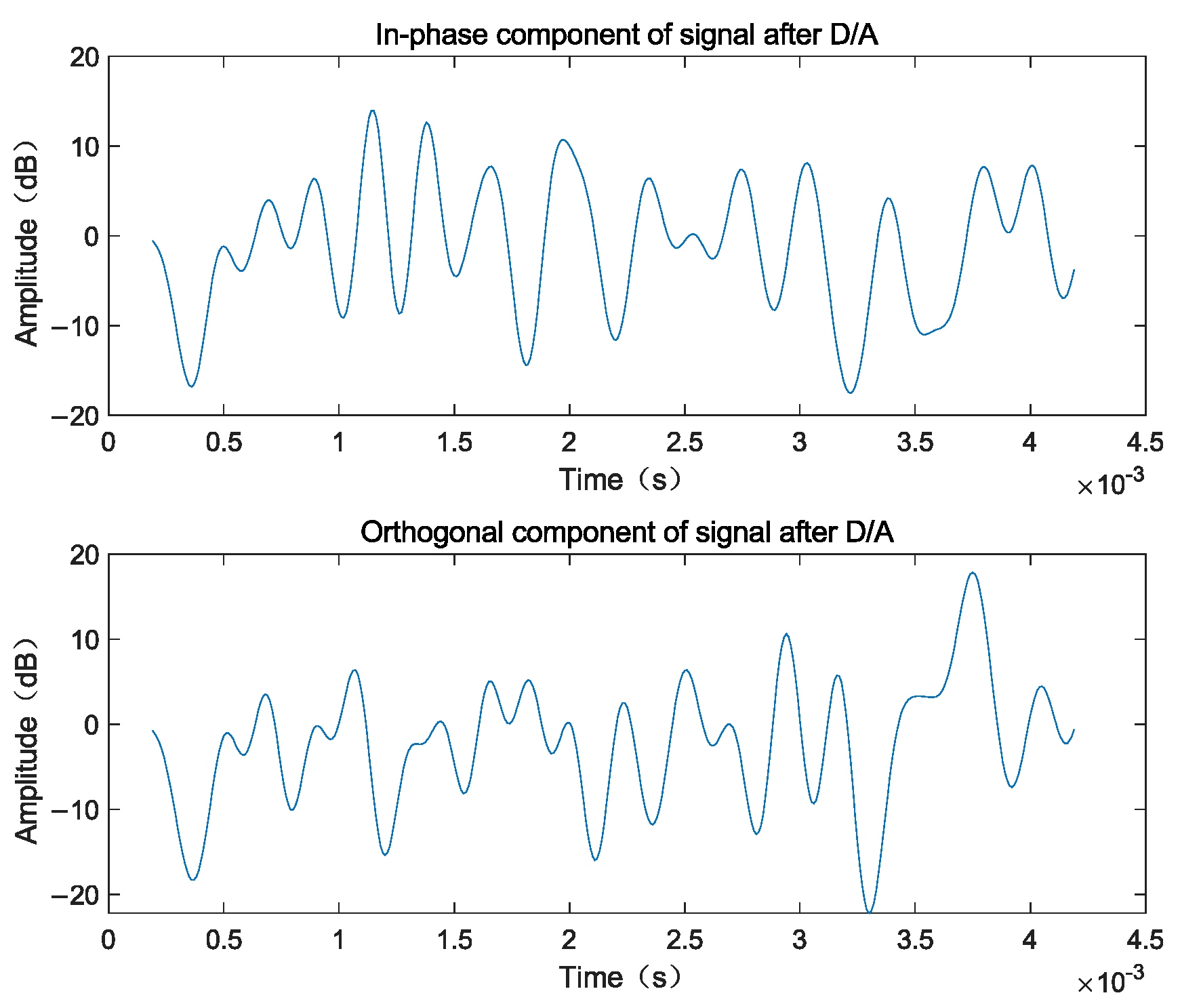
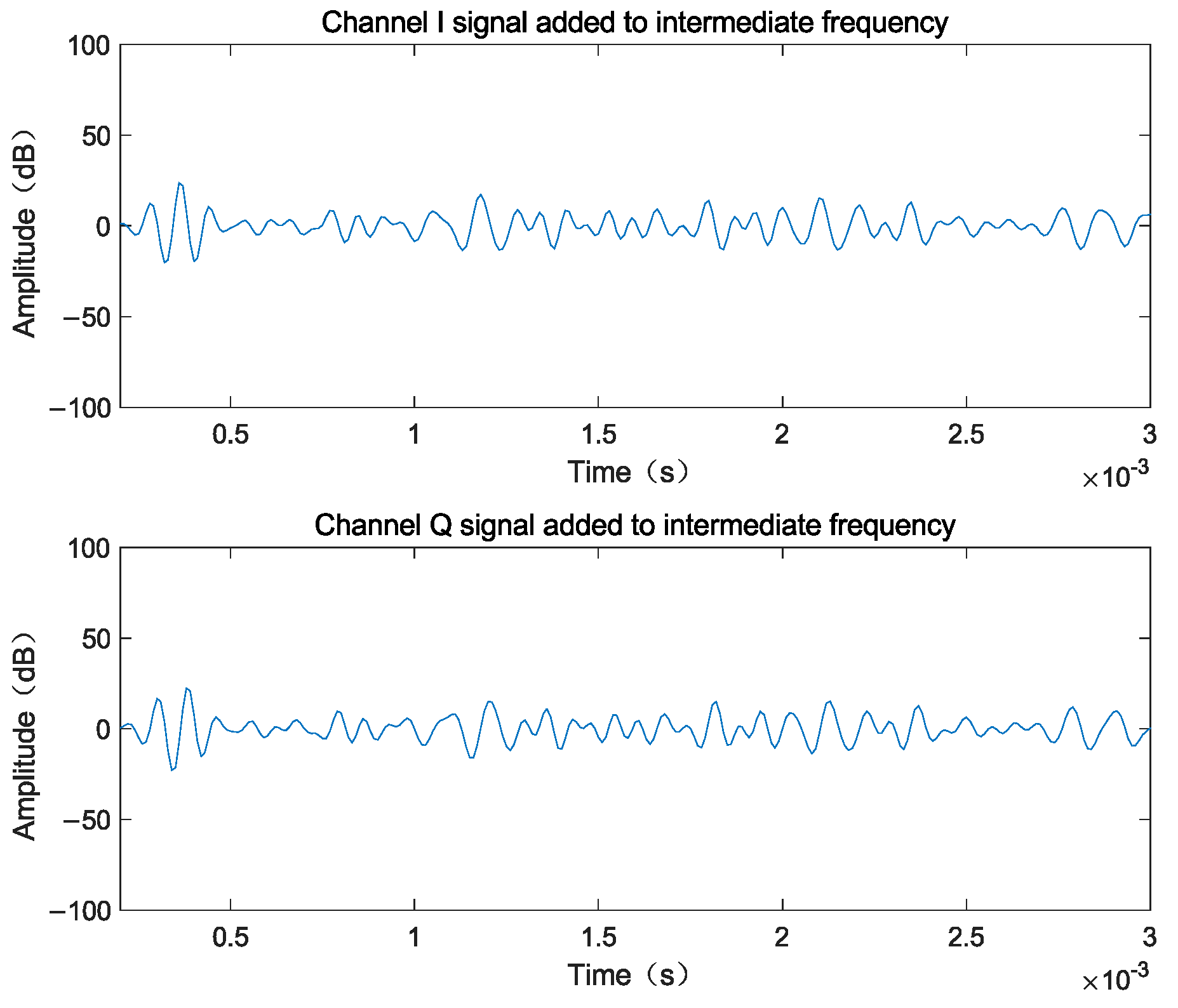
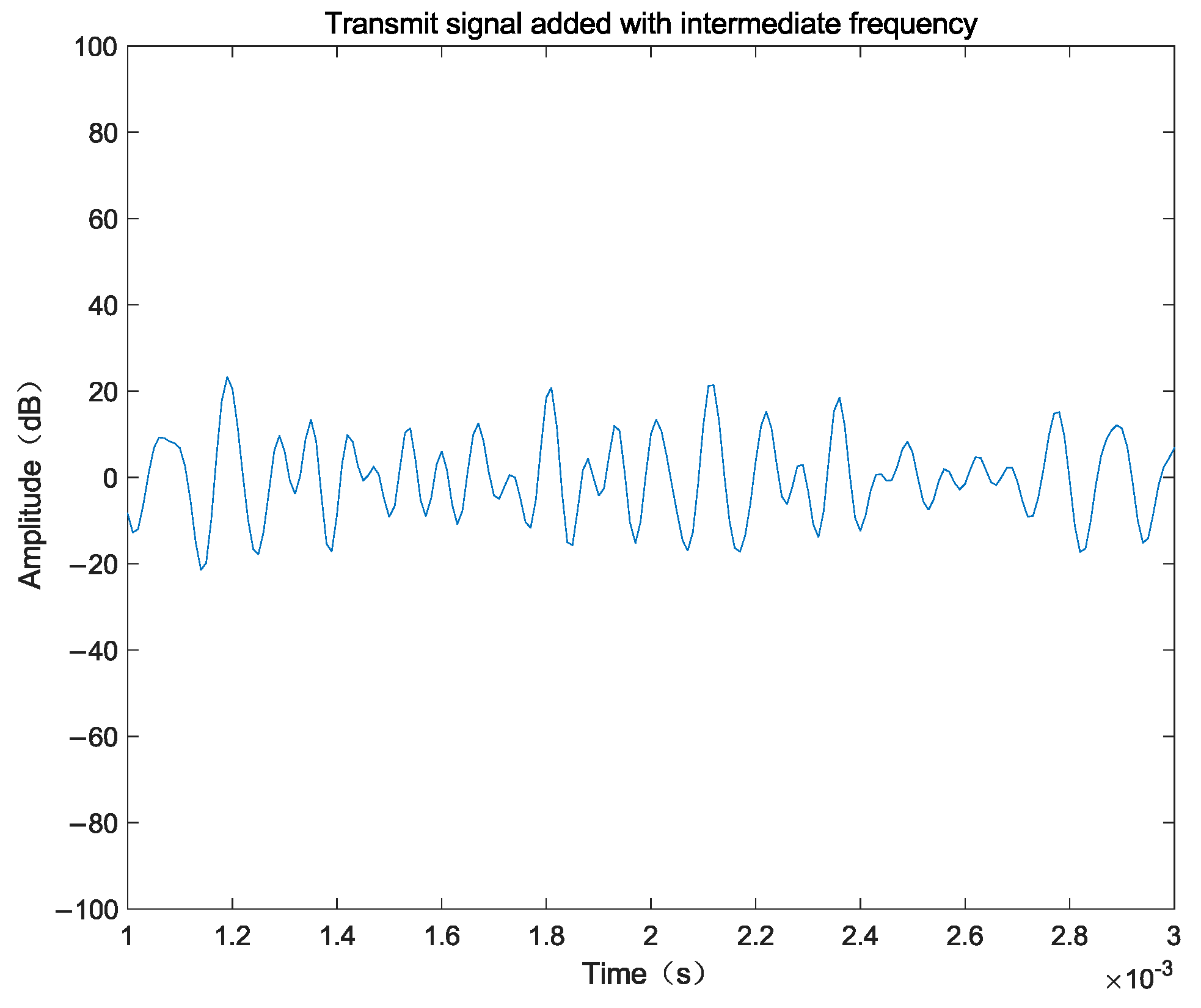
3.2. Simulation Results of Transmitter
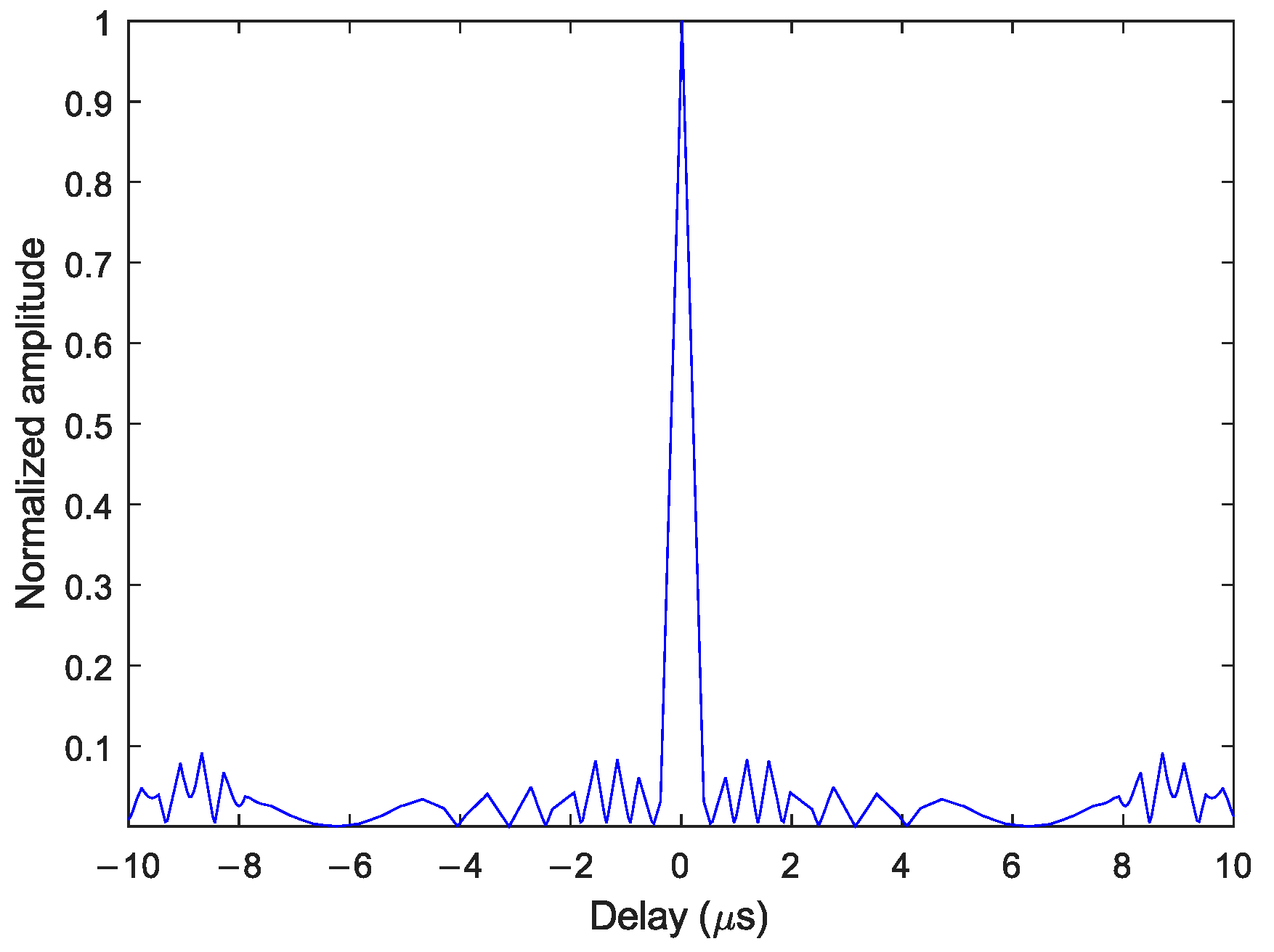
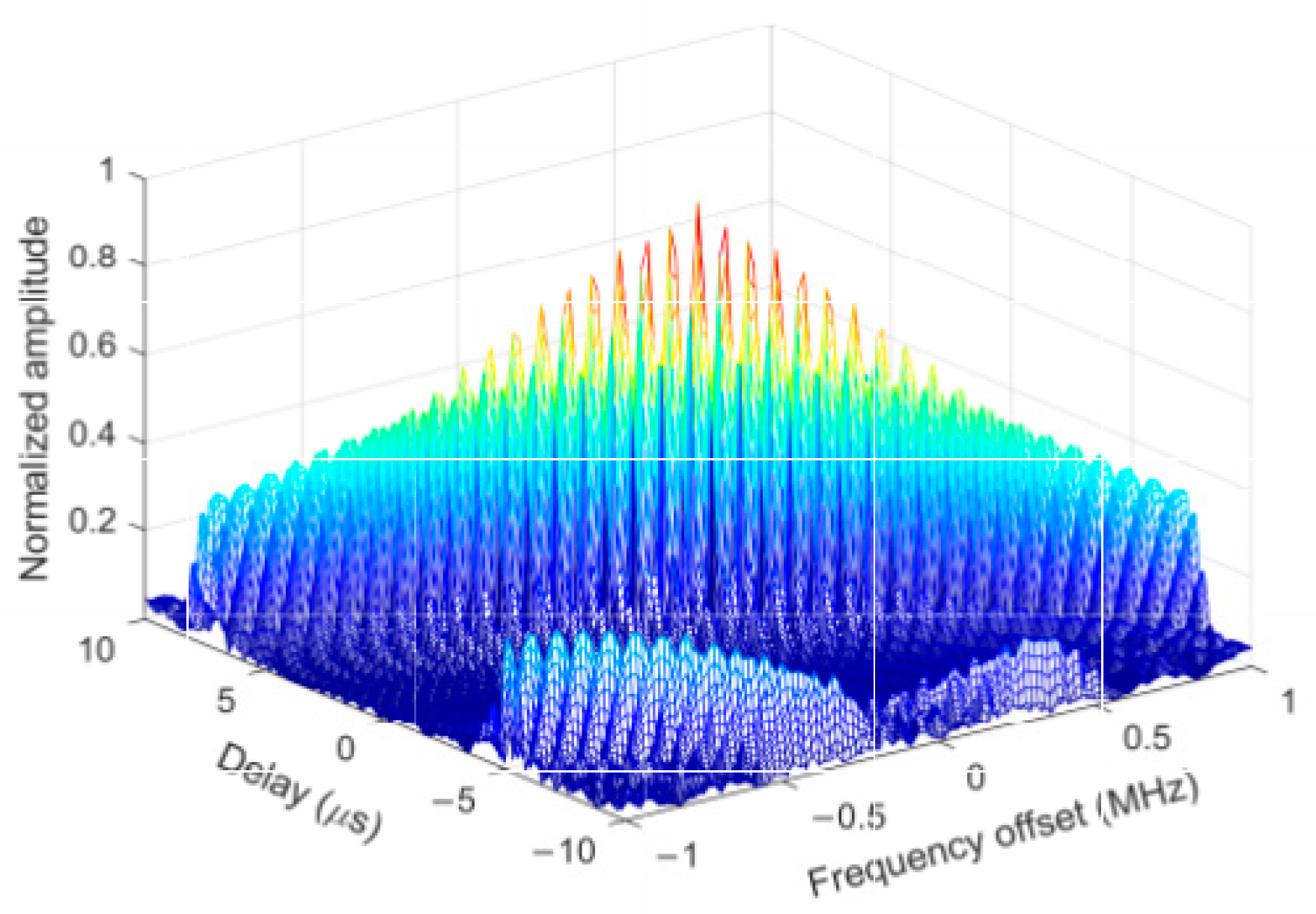
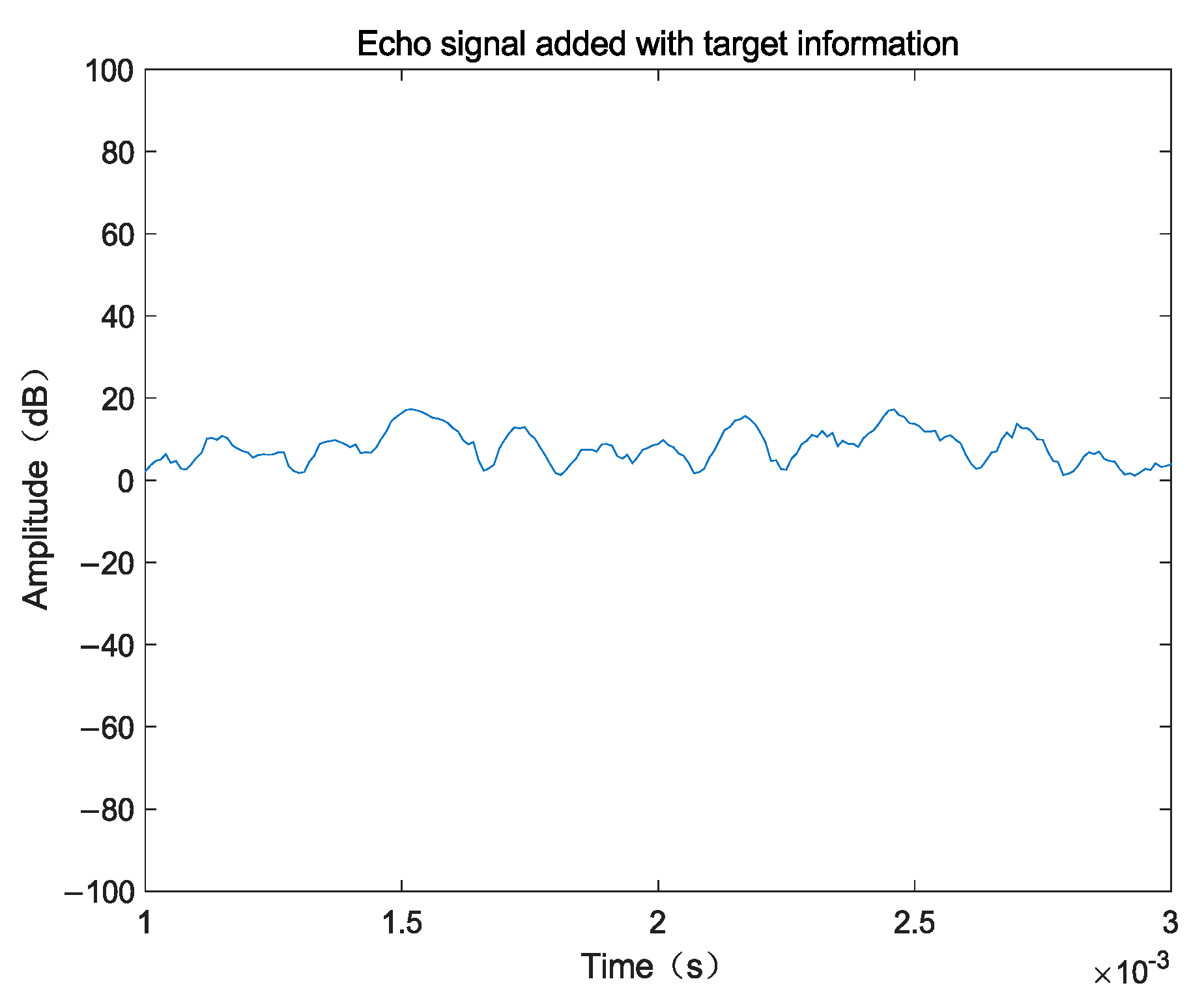
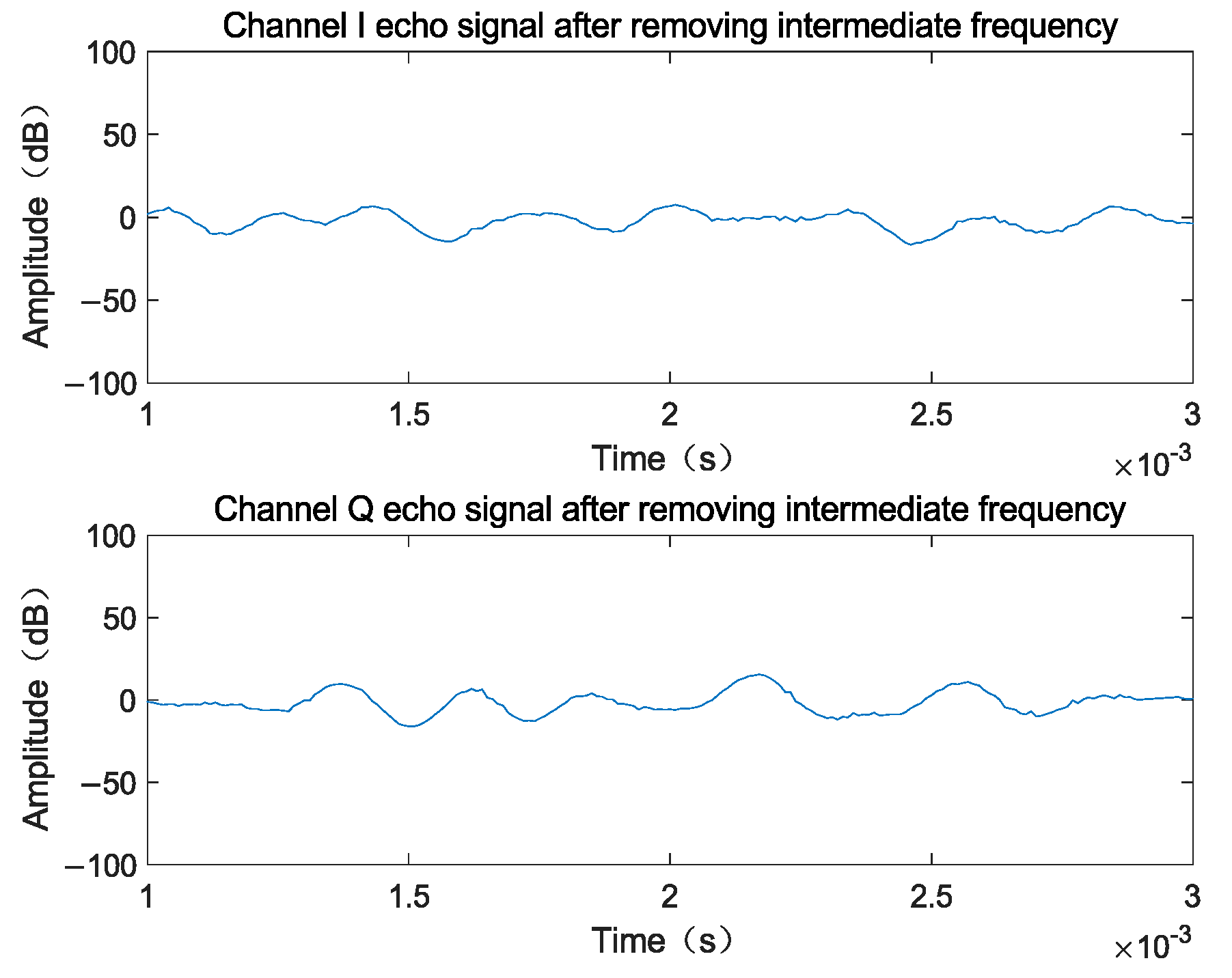
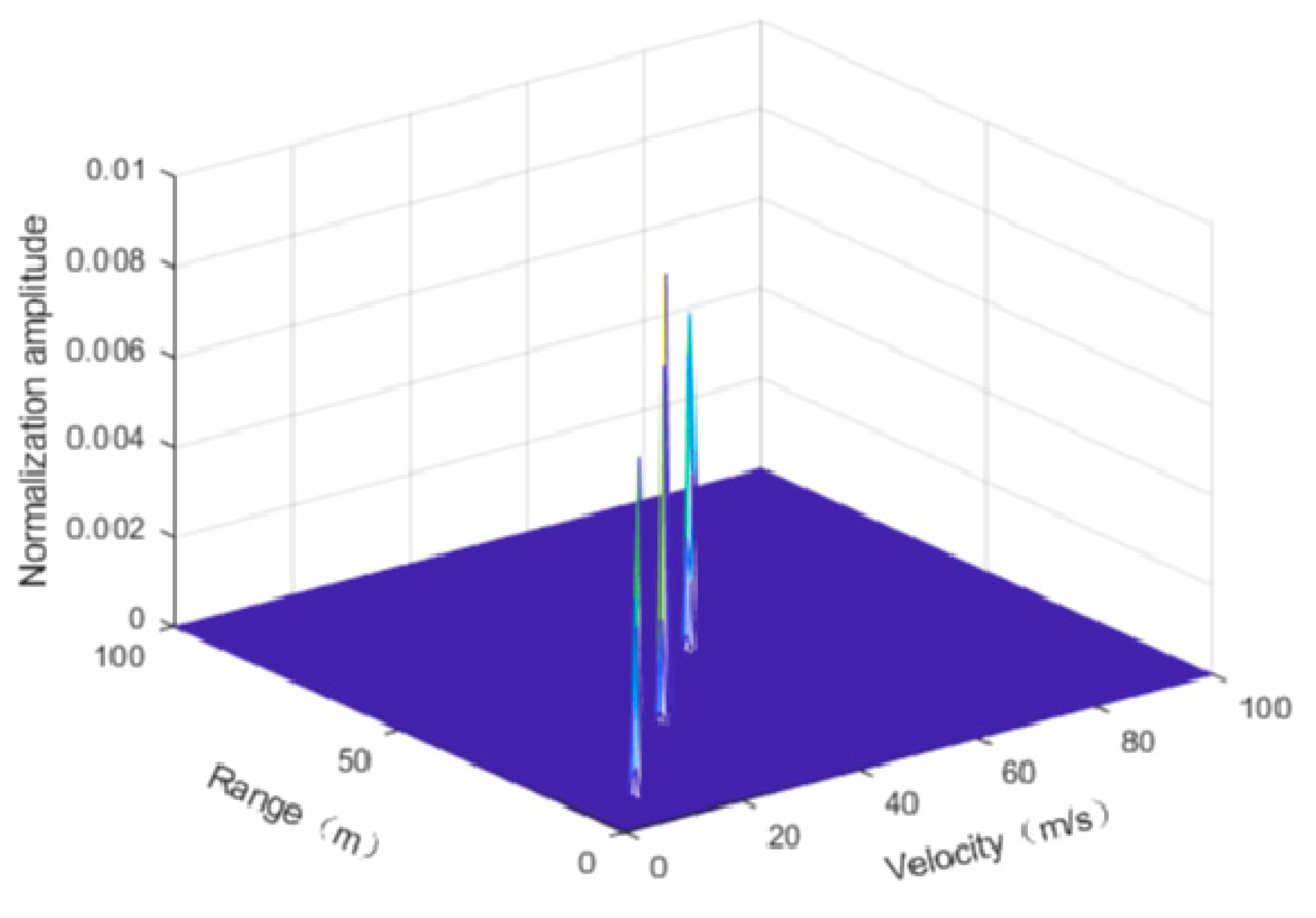
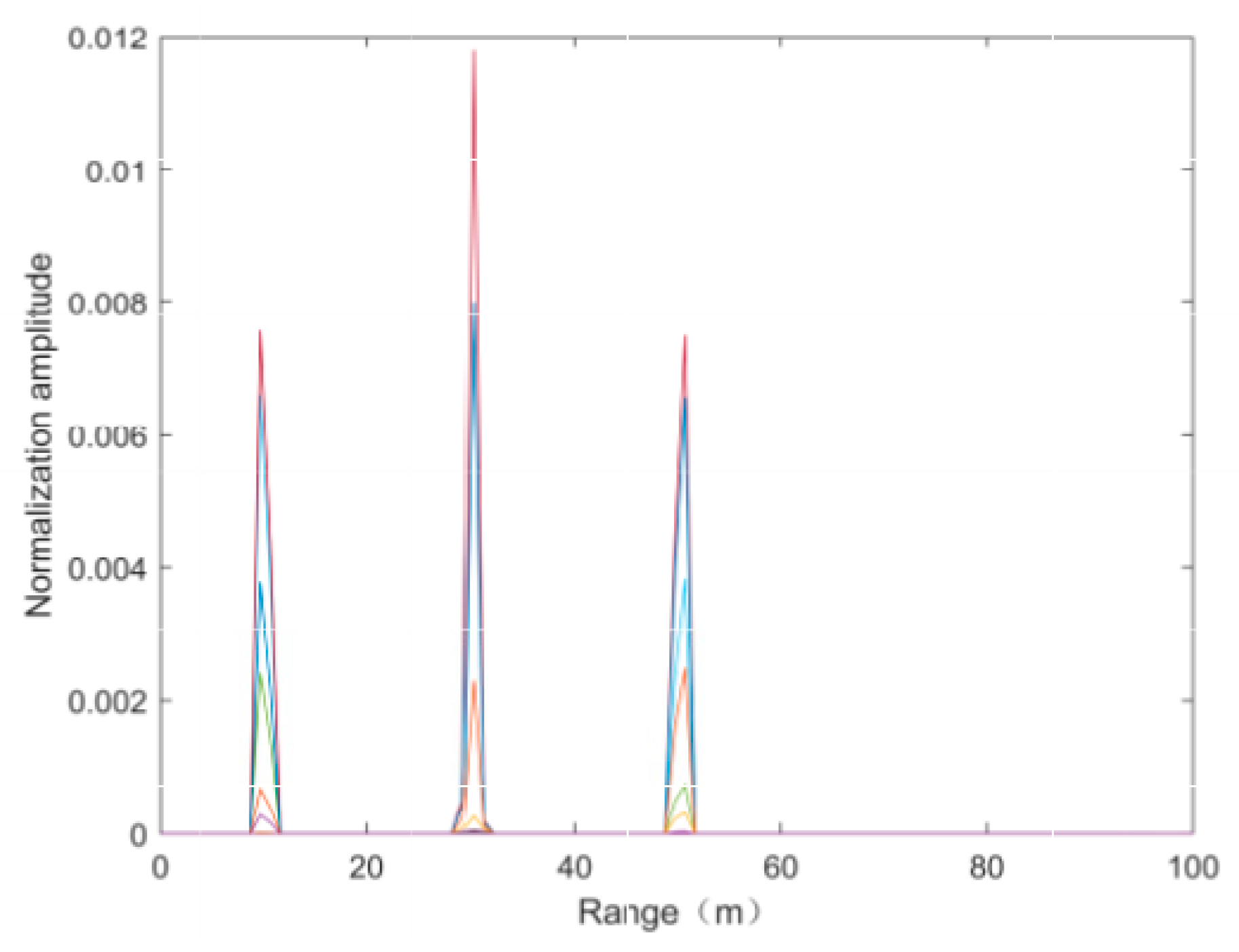
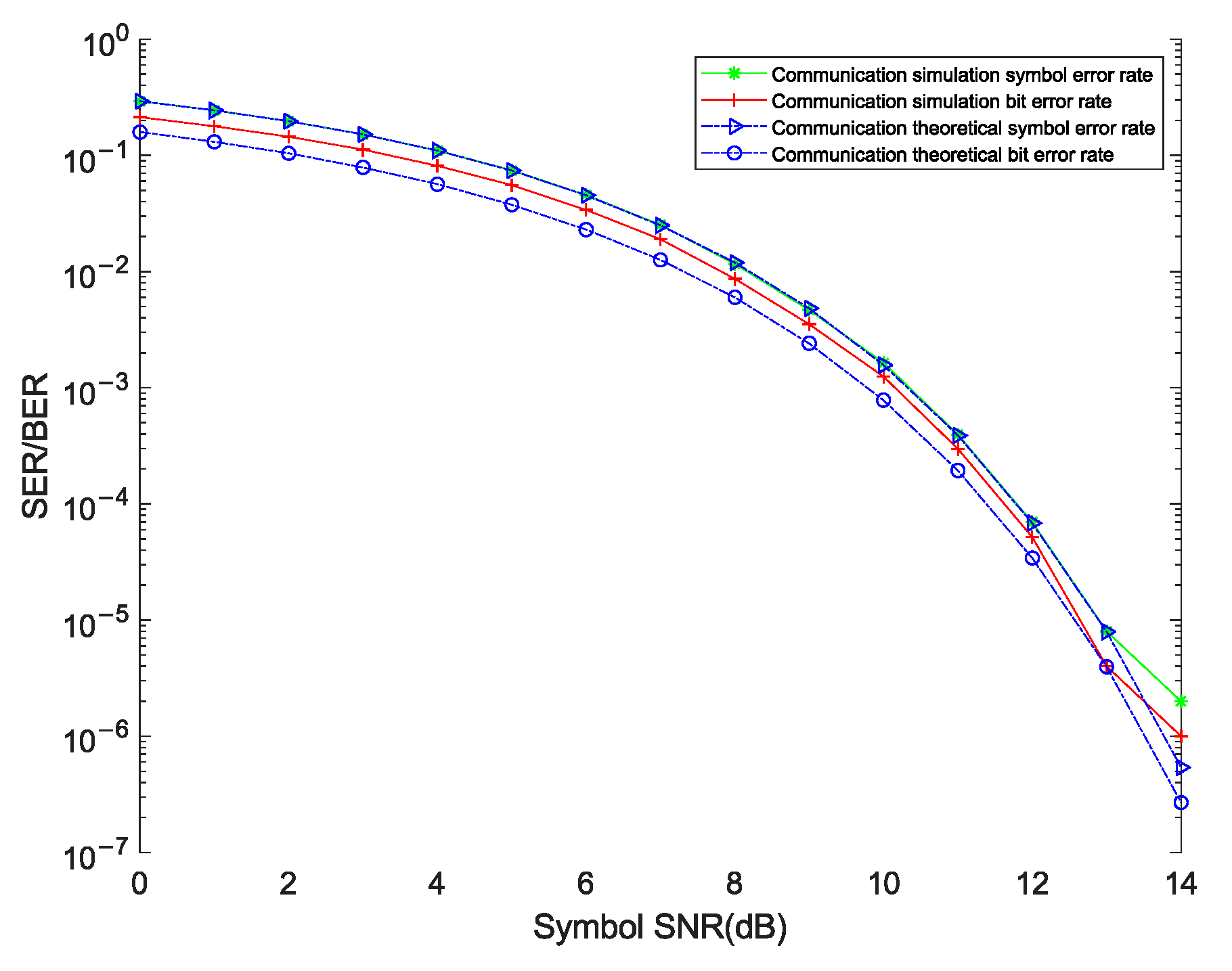
3.3. Simulation Results of Receiver
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Solberg, J.R.; Lynch, K.M.; Maciver, M.A. Active Electrolocation for Underwater Target Localization. Int. J. Robot. Res. 2008, 27, 529–548. [Google Scholar] [CrossRef]
- Lebastard, V.; Chevallereau, C.; Girin, A.; Servagent, N.; Gossiaux, P.B.; Boyer, F. Environment reconstruction and navigation with electric sense based on a Kalman filter. Int. J. Robot. Res. 2013, 32, 172–188. [Google Scholar] [CrossRef]
- Morel, Y.; Lebastard, V.; Boyer, F. Neural-based underwater surface localization through electrolocation. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2596–2603. [Google Scholar]
- Lanneau, S.; Lebastard, V.; Boyer, F. Object shape recognition using electric sense and ellipsoid’s polarization tensor. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4692–4699. [Google Scholar]
- Lim, H.S.; Ng, B.P.; Reddy, V.V. Generalized MUSIC-Like Array Processing for Underwater Environments. IEEE J. Ocean. Eng. 2017, 42, 124–134. [Google Scholar] [CrossRef]
- Peng, J.G.; Wu, J. Finite-element simulation study of an underwater active electrolocation system based on Cole-Cole model. Chin. Sci. Bull. 2016, 61, 2647–2658. [Google Scholar]
- Peng, J.; Wu, J. A Numerical Simulation Model of the Induce Polarization: Ideal Electric Field Coupling System for Underwater Active Electrolocation Method. IEEE Trans. Appl. Supercond. 2016, 26, 0606305. [Google Scholar] [CrossRef]
- Tucker, M.J. Conduction signalling in the sea. Radio Electron. Eng. 1972, 42, 453–456. [Google Scholar] [CrossRef]
- Momma, H.; Tsuchiya, T. Underwater Communication by Electric Current. In Proceedings of the OCEANS’76, Washington, DC, USA, 13–15 September 1976. [Google Scholar]
- Joe, J.; Toh, S.H. Digital Underwater Communication Using Electric Current Method. In Proceedings of the Oceans, Aberdeen, UK, 18–21 June 2007. [Google Scholar]
- Kim, C.W.; Lee, E.; Syed, N.A.A. Channel characterization for underwater electric conduction communications systems. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010. [Google Scholar]
- Wang, W.; Liu, J.; Xie, G.; Wen, L.; Zhang, J. A bio-inspired electrocommunication system for small underwater robots. Bioinspir. Biomim. 2017, 12, 036002. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Wang, W.; Zhou, Y.; Wang, C.; Fan, R.; Xie, G. CSMA/CA-based electrocommunication system design for underwater robot groups. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Cao, F.; Wang, W.; Xie, G.; Luo, W. Survey of Underwater Electric Field Communication. Ordnance Ind. Autom. 2013, 32, 51–54. [Google Scholar]
- Poncela, J.; Aguayo, M.C.; Otero, P. Wireless Underwater Communications. Wirel. Pers. Commun. 2012, 64, 547–560. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, M.; Song, Z. Development of Underwater Wireless Communication Technology. Commun. Technol. 2014, 47, 589–594. [Google Scholar]
- Neveln, I.D.; Bai, Y.; Snyder, J.B.; Solberg, J.R.; Curet, O.M.; Lynch, K.M.; MacIver, M.A. Biomimetic and bio-inspired robotics in electric fish research. J. Exp. Biol. 2013, 216, 2501–2514. [Google Scholar] [CrossRef] [PubMed]
- Miller, L.M.; Silverman, Y.; MacIver, M.A.; Murphey, T.D. Ergodic exploration of distributed information. IEEE Trans. Robot. 2015, 32, 36–52. [Google Scholar] [CrossRef]
- Gottwald, M.; Herzog, H.; von der Emde, G. A bio-inspired electric camera for short-range object inspection in murky waters. Bioinspir. Biomim. 2019, 14, 035002. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Wang, W.; Zhang, H.; Zheng, X.; Li, L.; Wang, C.; Xu, G.; Xie, G. Underwater robot coordination using a bio-inspired electrocommunication system. Bioinspir. Biomim. 2022, 17, 056005. [Google Scholar] [CrossRef] [PubMed]
- Blouin, S.; Lucas, C. Early Results and Description of an Underwater Electric-field Sensing and Communication Experiment in Bedford Basin. In Proceedings of the 2022 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 18–20 September 2022; pp. 28–32. [Google Scholar]
- Rong, S. Unification Analysis on Communication Equation and Radar Equation. Electron. Warf. 2006, 4. [Google Scholar]
- Qiang, L.I.; Jie, W. Joint wireless communication and radar sensing: Review and future prospects. J. Signal Process. 2020, 36, 1615–1627. [Google Scholar]
- Wang, M. Research on the Design of Integrated Signal for Radar and Communication Based on OFDM; Xidian University: Xi’an, China, 2015. [Google Scholar]
- Liu, Z.; Zhang, Y.; Luo, X. Performance Analysis of Radar Communication Shared Signal Based on OFDM. In Proceedings of the International Conference on Communications and Networking in China, Virtual Event, 21–22 November 2021; Springer: Cham, Switzerland, 2022; pp. 250–263. [Google Scholar]
- Mohseni, R.; Sheikhi, A.; Masnadi-Shirazi, M.A. Multicarrier constant envelope OFDM signal design for radar applications. AEU-Int. J. Electron. Commun. 2010, 64, 999–1008. [Google Scholar] [CrossRef]
- Peng, J.; Sheng, W.G.; Yuan, X.H. Bandlimited Effects on Digital Polyphase Coded Pulse Compressors in the receiver. Radar Ecm. 2002, 4, 30–33. [Google Scholar]
- Zhang, H. Waveform Design and Performance Analysis of Integrated Radar Communication; Harbin Engineering University: Harbin, China, 2021. [Google Scholar]
- Koopman, P. 32-bit cyclic redundancy codes for internet applications. In Proceedings of the International Conference on Dependable Systems and Networks, Washington, DC, USA, 23–26 June 2002; pp. 459–468. [Google Scholar]
- Indumathi, G.; Ananthakirupa, V.A.A.; Ramesh, M. Architectural design of 32 bit polar encoder. Circuits Syst. 2016, 7, 551. [Google Scholar] [CrossRef]
- Thompson, S.C.; Ahmed, A.U.; Proakis, J.G.; Zeidler, J.R.; Geile, M.J. Constant Envelope OFDM. IEEE Trans. Commun. 2008, 56, 1300–1312. [Google Scholar] [CrossRef]
- Ahmed, A.U.; Thompson, S.C.; Zeidler, J.R. Constant envelope OFDM with channel coding. In Proceedings of the MILCOM 2006–2006 IEEE Military Communications Conference, Washington, DC, USA, 23–25 October 2006; pp. 1–7. [Google Scholar]
- Zheng, J. Study on Some Key Issues of OFDM Wireless Communication System; University of Electronic Science and Technology of China: Chengdu, China, 2010. [Google Scholar]
- He, J. Design of Radar Communication Integrated Signal Based on OFDM; University of Electronic Science and Technology of China: Chengdu, China, 2017. [Google Scholar]
- Liang, T.; Li, Z.; Wang, M.; Fang, X. Design of radar-communication integrated signal based on OFDM. In Proceedings of the International Conference on Artificial Intelligence for Communications and Networks, Harbin, China, 25–26 May 2019; Springer: Cham, Switzerland, 2019; pp. 108–119. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Electromagnetic Wave | Acoustic Wave | Electric Field |
|---|---|---|---|
| Media dependency | No need to rely on media | Must rely on medium vibration | Low medium dependency |
| Typical operating frequency | Megahertz | Tens of kilohertz | Tens of kilohertz |
| Absorption attenuation in water | 3 dB/m@ 10 kHz | 1.1 dB/km@ 10 kHz | Almost no attenuation |
| Media uniformity | Basically propagating in a straight line | Highly affected by temperature and propagated in a curved manner | Can achieve omnidirectional dissemination now |
| Propagation delay | Low latency | Large latency | Almost no latency |
| Communication distance | A few meters | Dozens of kilometers | Tens of meters |
| Affected by environmental factors | Electromagnetic noise impact | Emission, multipath impact | Electromagnetic noise impact |
| Symbol | Parameter | Value |
|---|---|---|
| σ | Conductivity | |
| μ | Permeability | |
| f | Transmission frequency | 12 kHz |
| Wavelength | ||
| Wave velocity | ||
| B | Bandwidth | 100 kHz |
| IFFT and FFT points | 1024 | |
| N | Number of subcarriers | 1024 |
| ∆f | Carrier interval | 97.656 Hz |
| M | Number of OFDM | 256 |
| OFDM period | 0.0102 s | |
| Q | Number of data in an element period | 1 |
| fdmax | Maximum Doppler shift | 9.7656 Hz |
| Rmax | Range resolution | 5 m |
| Vmax | Velocity resolution | 5 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, X.; Zhao, Z.; Zhang, Y.; Hu, Q. Integrated Underwater Detection and Communication System Based on P4 Code-Modulated OFDM Signal. J. Mar. Sci. Eng. 2023, 11, 920. https://doi.org/10.3390/jmse11050920
Feng X, Zhao Z, Zhang Y, Hu Q. Integrated Underwater Detection and Communication System Based on P4 Code-Modulated OFDM Signal. Journal of Marine Science and Engineering. 2023; 11(5):920. https://doi.org/10.3390/jmse11050920
Chicago/Turabian StyleFeng, Xinglong, Zhenyi Zhao, Yuzhong Zhang, and Qiao Hu. 2023. "Integrated Underwater Detection and Communication System Based on P4 Code-Modulated OFDM Signal" Journal of Marine Science and Engineering 11, no. 5: 920. https://doi.org/10.3390/jmse11050920