1. Introduction
The technological development of the world is ever incrementing, and humankind is searching for innovative pathways to perform the tasks demanded by industries or services with improved efficiency and effectiveness. The digitalization of the world boomed with the evolution of Cloud computing, Internet of Things (IoT) [
1,
2], Big Data analytics, Virtual Reality (VR), Augmented Reality (AR), Artificial Intelligence (AI) [
3] with Machine Learning, Deep Learning and Neural Networks, etc. The same has led the way to the development of the Cyber-Physical System (CPS), which is hailed as the epitome of the manufacturing and consumer service sector [
4]. It is an automated system with a connection of physical reality featured with computing structures with smart networking tools. The technologies of 5G and Tactile Internet [
5], with the provision of ultra-reliable ultra-low-delay, have enhanced communication and feedback between entities across oceans. To create the fusion between cyberspace and physical space, Digital Twin (DT) was introduced as a rational solution in associating the two extents. The concept of DT has become a real application within a limited time, and some disciplines are surpassing the expectations and predictions made during the early conceptual inception of DT.
In the present world, simulation has become an integral part of system development for every engineering discipline. Starting from solving design problems using numerical algorithms in the 1960s, simulation has taken us to the digital era, where simulation is integrated into the life cycle of the particular product including design, testing, manufacturing, commissioning, operating, and decommissioning [
6]. This process of evolution has opened the way to DT, which is more versatile and dynamic than the physical twin concept. Ever since, the concept of DT has become a reality, expanding its outreach to various disciplines around the world including the maritime domain.
This survey is an endeavor to review and understand the DT technology and the meticulous footprint it has made within the maritime domain to comprehend the future compatibility to meet the upcoming high-tech requirements. Past technological milestones in DT evolution in the marine sector are highlighted in this article, which includes an evaluation of ongoing research and applications around the globe. Further, scientometric analysis has also been performed to identify the key research points such as author contributions, author impact research collaborations, demographic research impact, trending keywords, etc. The main contributions of this publication can be condensed as follows.
A comprehensive literature review on DT from the initial notion up to the year 2022 with a focus on the maritime domain.
Proposed a generic four-layer DT framework for a marine vessel.
Scientometric analysis of the published research related to marine DT within the duration of 20 years including demographic collaboration and trending keywords.
The progress of development and implementation of DT technology in the maritime sector, thus providing insight for researchers with key challenges and gaps within the marine DT domain.
This paper is structured in the following manner. Followed by the Introduction in
Section 1,
Section 2 describes the origination of the DT concept with nomenclature clarification. In the
Section 3, an overview of the implication pathway of DT technology in the marine industry is discussed. In
Section 4, various DT-based applications in different sectors in the maritime domain are discussed, while
Section 5 describes the prerequisites for a DT-based system along with the overall DT framework for the marine sector. In
Section 6, a comprehensive bibliometric study is carried out using the scientometric analysis approach.
Section 7 describes the key challenges and future trends. Finally, the conclusion of the entire effort is provided in
Section 8.
2. Inception of the Digital Twin Concept
The initial conception of having a “Twin” was first implemented by NASA in their “Apollo” program, which used two identically built satellites in their missions [
7]. One would go on the actual voyage in outer space while the other physical twin will remain in the laboratory in a controlled space, thus allowing the mission scientists to analyze the conditions of the launched vehicle by comparing the conditions with the ground twin. The same helped them in parameter monitoring and fault analysis with a minimum data transfer between the two vehicles. A similar concept was utilized in the “Iron Bird” (
Figure 1) ground-based aircraft system testing platform by Airbus Industries, where a hardware simulator twin was used in system evaluation, design and testing while a simulated cockpit was utilized by the test pilots [
8].
The combined usage of the two terms of “Digital + Twin” first came up in a white paper related to the design for 3D arterial phantoms in coronary arteries published in the
Radiology journal of RSNA (Radiological Society of North America) [
9]. Authors have developed a realistic model of arteries using stereolithography using a computer-based model and they have referred to the computer-based design as a “digital twin”.
The novel concept of the DT was first proposed in the year 2002 by Dr Michael Grieves, a leading scientist in the field of advanced manufacturing at the Florida Institute of Technology at a manufacturing engineers conference in Troy, Michigan. His idea was based on constructing digital information on the physical model on his own (
Figure 1). This digital information is a replica of the data embedded in the physical system, which will be connected with the physical system in the complete life cycle of a particular system/component [
10].
The concept of DT was also brought up by NASA under their “Modeling, Simulation, Information Technology & Processing Roadmap at Technology Area 11”, where a DT is introduced as a multiscale simulation of a vehicle or system with its own incorporated physics by optimally utilizing its physical data, sensor data, historical data, etc., in the effort of obtaining a real-time image related to the life of its corresponding physical twin in outer space. Since the concept of DT is practical and more realistic in nature, application for a single vehicle or even for interdependent multiple assets can be performed robustly. The anomalies that occurred during the manufacturing stage that could imperil the space missions can also be foreseen during its manipulation. DT can act as the backbone of any high-fidelity physical model, supporting the integrated vehicle health management system in evaluating historical data. With the input dataset, DT will enhance the mission success credibility of the craft with continuous monitoring and evaluation of the operational condition and the remaining running hours ahead. A robust DT model will assist damage mitigation or degradation by real-time data analysis/forecasting and suggest required changes in an ongoing space mission to enhance the life span leading to mission success [
11]. Later, USAF came up with the concept of Digital Thread, where each USAF aircraft enters the fleet with its own DT. The DT will help in Structural Health Monitoring (SHM), and maintenance, thus allowing calibration of the craft in its operation state by comparing the sensor readings of flight and DT. It also acts as a digital surrogate to plan the design, production, and acquisition phases of the project [
12]. Though it was a clear definition for DT to be made considering the representation fidelity, model simulation capabilities, synchronization techniques, data collection, exchange attributes, etc., it is also stated as a virtual representation of the real-world asset with an exchange of information in a predetermined frequency [
13]. It is a digital representation of the active product service system, which comprises preset characteristics, conditions, behaviors and properties [
14].
Along with this concept, the Internet of Vehicles (IoVs) has also been developed with the integration of Vehicular Ad hoc Networks (VANETs) and the Internet of Things (IoTs) [
15,
16]. These were more focused on land-based locomotives, but the notion is widely accepted by many industrial sectors. IoT has supported the real-time data handshake component of DT, which has been the basement of existing topology. These also incorporate the diagnostics and prognostics embedded within the system architecture along with optimization of the process [
17]. Risk analysis and accident prevention with DT support is another frontier that has already been adopted by the aviation industry. The system verification of the Boeing 737 Max after initial failures is a great example [
18]. It ultimately promotes the concept of Smart Products (SP) in various phases of the product life cycle, which benefits the stakeholders in the user groups of the product or asset [
19].
In the industry, DT is used under different names such as cyber objects, digital avatars, etc. The data flow between the DT and the physical unit will depend upon the purpose of the DT in the industry, which uses cyber objects or digital avatars. Accordingly, the nomenclature of DT has been proposed based on the two-directional data link between the DT and the actual unit. Kritzinger W. et al. have categorized the digital counterparts of a physical object based on the data flow into three types: Digital Model, Digital Shadow, and DT [
20] (
Figure 2).
Digital Model: There is no automated data exchange between the two units. Data integration is done manually to synchronize.
Digital Shadow: There is only one-way data flow from the physical object towards the digital counterpart. The data arriving from the physical asset will update the digital object, but not vice versa. This requires offline actions with Human-in-the-loop (HITL) interaction between the physical object and the digital model.
Digital Twin: Fully integrated data flow is available where a two-way automated data link is established. Both units are in a real-time synchronized state and the physical unit can be influenced by the digital object automatically.
3. Adoption of Digital Twin Technology for the Marine Sector
The induction of DT in marine vessels is already underway and
Figure 3 explains the summarized trail of actions for said induction. The seafaring sector has been developing its technologies, targeting improvements in efficiency, emission controls, and ergonomic operating systems. Traditionally, most marine vessels, specifically surface vessels, are built with two separate power systems. One is dedicated to the propulsion system and the second is used to cater for the electricity demands. In this context, most of the vessels were built using diesel engine-driven propulsion systems due to the ergonomic simple robust architecture and ease of maintenance. However, traditional systems are highly polluting the marine environment, which has been regulated by the IMO regulations. Shipbuilders are finding ways to suffice these new regulations in their designs. Electrification of the vessels has been an ideal solution to gratify the emission control guidelines [
21].
3.1. Ship Electrification
The first electrical propulsion system was introduced by Russian scholar Boris Jacobi, which was a paddle boat driven by an electric motor. Due to the low battery capacity and efficiency, the maximum speed achieved was 1.5 knots, which discouraged the development of a system for a long time ahead [
22]. In 1903, Swedish shipyard ASEA built the river tanker “Vandal” as the first vessel to carry a diesel-electric propulsion system [
23]. At the end of WWII, more emphasis was placed on the development of electrical propellers and ships such as the Ice Tanker “Uikku” and Passenger Ferry Queen Mary 2. Uikku was the first ship to be installed with an Azipod propulsion system where the main electric motor was installed in a separate gondola that could direct the thrust with a 360° control. RMS Queen Mary 2 is a luxury cruise liner propelled by hybrid diesel turbo-electric propulsion with four 18 MW Azipods driven by two gas turbine generators and four diesel engine-driven generators. This propulsion topology has provided navigation flexibility along with economical gains in varying speed demands and different passage legs while complying with emission control protocols [
24].
Integrated Full Electrical Propulsion (IFEP) is reducing fuel consumption heavily by avoiding the low load portion of fuel consumption curves in sharing the load of propulsion along with ships’ service loads including the weapon systems [
25]. It is far superior to the standard propulsion systems such as Combined Diesel Electric and Gas (CODLAG) systems or Combined Diesel Electric or Gas (CODLOG) [
26]. The latest US Navy stealth Destroyer USS Zumwalt was commissioned in the year 2016 as the first full-electric warship equipped with an integrated power system [
27]. Further, with the initial project of MS Medstraum, Norway has implemented the world’s first battery-powered ferries to transfer vehicles and people with greener environmental insights [
28].
With the development of IFEP, ship designers further developed the concept of All-Electric Ships (AES) [
29]. The AES concept has provided high redundancy and mission capability even at a slight initial cost. At present, most of the high-end naval ship projects have opted for this technology due to the advantages posed by the electrical-based high-power navigation, communication, and weapon systems. Royal Navy Type 45 Destroyers and the aircraft carrier HMS Queen Elizabeth [
30] are a few examples of AES-based power topology. Hybrid powering topology is also developed and implemented to achieve the redundancy and advantages of both mechanical and electrical drives.
Benefits of the Electrification in Marine Vessels [
31]:
Efficiency is improved as a huge prime mover will be replaced by an array of diesel alternators and the load can be catered at the highest efficient speed with the generated thrust by more efficient electric motors.
The load can be managed easily to cater to the demand based on each mission.
Improved maneuverability of the vessel and faster response where podded propellers will allow 360° steering along with dynamic positioning.
Flexibility in placing the generators in the ship without considering the shafting arrangements.
Allowing the introduction of cleaner and more efficient future power-generating technologies such as fuel cells, renewable energy, etc., to the existing vessel.
Emission control goals can be easily achieved.
3.2. Ship Digitalization
Along with the electrification process, digitalization has also become a key innovative trend in every operation in the maritime sector due to its efficiency, effectiveness, superlative performance, etc. New tools in designing, performance evaluation, simulation, and information safety are being introduced and the same is being improved day by day, which further assists in producing more robust models. As per the digitalization service development framework proposed by Erikstad S., the process of digitalization of the maritime sector can be achieved through two different approaches [
32].
Service-driven Perspective: Considering the ship owners’ specific requisites in operation and decision making, build is performed in implementation of hardware and software that suits the ship. It is operating in the need-space, where tactical-level improvements are more considered.
Sensor-driven Perspective: It will consider the available inputs from the already installed sensors in a particular ship to design a digitalized framework to support its operation. This method operates through the solution-space, which is the key doorway for future DT-based systems.
The marine industry will be able to gain the full merits of digitalization through the service-driven approach starting from the design phase of the vessel. However, existing platforms can be improved through the second approach to par with the present smart functions. Digitalization is further considered an effective, innovative, and optimized method enabling products and services as per Industry 4.0 [
33]. Asset-intensive industries such as shipping, oil, gas, energy, etc., are looking for innovations that increase efficiency and reduce the cost while effectively managing operational risks and security. Main configurations such as the navigation system, power system and automation/control system are becoming fully digitalized, leaving the old analogue systems obsolete. Integrated Platform Management Systems (IPMS) available in present ships can link all the above system architectures into a centralized topology, thus providing a more ergonomic operation and increased domain awareness for all stakeholders.
3.3. Smart Shipping
With the availability of satellite communication, the onboard modules are easily linked with onshore supporting facilities, rather than opening the standalone data infrastructures onboard holistically to shore operators (
Figure 4). As per the Guidance Notes of the American Bureau of Shipping on Smart Function Implementation, they have highlighted the importance of having a DT to support the data infrastructure in onshore processing during Big Data Transfer [
34]. It will allow operators to continuously collect, transmit, manage, and analyze the data for real-time monitoring, increase awareness and decision making for both human-initiated decisions and autonomous command and control. It further enhances the ships’ situational awareness, navigational safety, and reduction of crew fatigue and human error-related accidents.
The main requirement of a smart ship can be defined as the ability to perform the intended functions autonomously. The transformation from a traditional human-based system to full autonomy is achieved with the digitalized platforms in the electrified vessels. Smart ships highly depend upon the digitalized marine eco-system, which is focused on autonomous operation.
Furthermore, Wartsila and Rolls-Royce have announced the successful testing and demonstration of dock-to-dock navigating fully autonomous ferries with zero intervention of the master on-board. Wartsila, with their hybrid-powered ferry
Folgefonn, made a three-stop route in Norway, while the Rolls-Royce ferry
Falco made an unmanned voyage in Finland with autonomous collision avoidance and docking [
35].
This evolution has opened the doorway for DT technology to enter the shipping industry by bringing all experts into a centralized topology, providing powerful analysis, understanding, and diagnostics that are crucial for decision-makers in every stage of the ship’s life. This iteration has made the pathway for Ship DT (SDT), which incorporates the basic topology of the DT concept to develop and implement for various applications within the maritime domain. The limits are endless in this effort, but this DT can be primarily based on three main virtues, namely Asset Representation, Operational Behavior Model, and Parameter Measurement/Monitoring. The application of the technology can further be divided into the design phase, manufacturing phase, service phase and retire phase [
36]. This encompasses every action that the ship must undergo during her life cycle. It will support the actions from preliminary conceptual design and optimization to the final validation of the model. The developed DT model will then assist the supply and production measures during her building at the shipyard till the final performance trials and commissioning. During the entire service period, DT will be the key tool to performing intended functions during her operational phase. Routine upkeeping of the vessel to Planned Preventive Maintenance (PPM) to Condition-Based Predictive Maintenance (CBPM) will be functioning through the DT model with all historical data accumulated in condition monitoring, prognostics, and diagnostics and even the simulated testing of the systems/components. However, the support it could render during the decommissioning phase has yet to be studied.
3.4. Automation of Marine Vehicles
Automation can be considered the final step of striding towards a fully DT-based environment within the maritime sector. Autonomous ships are under extensive research all over the world and are being implemented due to the versatility of unmanned operations. As per the International Maritime Organization (IMO) regulation enforced in 2021, Maritime Autonomous Surface Ships (MASS) are to be regulated under four separate degrees, which are categorized as per the level of autonomy incorporated into the vessel [
37]. A ship may also have the interchange between the four states of autonomy during its operation based on the type of vessel and designated task. This allows flexibility in asset management onboard with crew augmentation as per the dynamics and constraints of specific operations of the vessel.
Degree One: Ship with Automated Processes and Decision Support: Seafarers are present onboard; few functions may be operated onboard at times and operators are on standby and ready to take over control.
Degree Two: Remotely Controlled Ship with Seafarers Onboard: The entire ship will be operated remotely from the shore station, but seafarers are available onboard to take over control at any time.
Degree Three: Remotely Controlled Ship without Seafarers Onboard: The shore operator will control the functions of the entire ship remotely and have no humans onboard.
Degree Four: Fully Autonomous Ship: The intelligent control system of the vessel will take actions based on the decisions made by itself with full autonomy.
As per Kaber, Human Automation Interaction (HAI) in complex systems will be governed by the Level of Automation (LOA), which is highly essential to be considered during the design stage of any autonomous system [
38].
LOA-0: No Automation: Full-time human operation with the assistance of parameter indications and warnings.
LOA-1: Driver Assistance: Acceleration/deceleration/steering will be assisted by the operator by the inbuilt system but performed by the operator themself.
LOA-2: Partial Automation: Steering/acceleration/deceleration would be performed by the automated system and all remaining decisions will be performed by the operator themself.
LOA-3: Conditional Automation: Dynamic actions of the vessel will be performed by an automated system and the operator will intervene if required.
Hence, a fully autonomous intelligent surface vessel would be designed to be operated in the LOA under the fourth degree of IMO regulations for MASS. However, careful assessment of the usage is to be analyzed since ships are high-value cost-sensitive assets voyaging for weeks at times without seeing a shore. Thus, autonomous systems must be designed at a high-fidelity robust standard to be capable enough to address all complex situations during the operation of the vessel.
Autonomous Marine Vehicles (AMVs) are becoming popular both in commercial and military applications, as extensive research and development are underway all over the world [
39]. It ranges from environmental surveys, cargo/passenger operations, hydrography, search and rescue, sea patrols, coastal protection, etc. They can be semi-submersible, conventional planing hulls, semi-planing hulls, and hydrofoils based on the sea surface, and these can be further augmented with the evitability of the limitations imposed by manning ergonomics [
40,
41]. LOA can vary by the application and the different scenarios she undergoes during the operations.
The applications of AMVs can be primarily divided into two parts: military and commercial. In military applications, DT can be incorporated into various missions in Anti-Submarine Warfare (ASW), Seabed Warfare (SBW), Mine countermeasures, Special operations forces support, Electronic Warfare (EW), Surveillance, Asymmetric Warfare, etc. Recently, in the Russia–Ukraine conflict, Unmanned Surface Vessels (USVs) have been used as self-destructing attack drones capable of destroying surface vessels or strategic land infrastructures such as piers, bridges, and port facilities, which has brought up a new dimension in the modern battlefield. These drones can also be swiftly deployed for the protection of high-valued assets including the major fleet units, port facilities, offshore platforms, coastal power generation stations, etc. The commercial applications can be stated as commercial shipping (cargo/passenger), marine research and survey, search and rescue (SAR), meteorology services, environmental protection, etc.
The functioning of these unmanned automated vessels including the integrated Guidance, Navigation and Control (GNC) will be monitored and governed by the shore control stations with the capacity to intervene where it is necessary depending on the situational shift based on the imposed level of autonomy protocol. In the case of a harbor, there will be various other drones, ROVs, and auxiliaries that will also be controlled by this station supporting the Smart Port functions. For example, the Norwegian University of Science and Technology (NTNU) Shore Control Lab has implemented a similar station to control the autonomous passenger transport ferries at Trondheim River [
42]. A higher level of autonomy in the operation of any marine system will ensure a smooth and straightforward approach to the implementation of DT-induced functionalities in processes such as design, control, management, etc.
4. Present Digital Twin Manipulations in Marine Industry
Digital Twin Technology is still in the infancy stage when considering the maritime domain. Less research work has been conducted compared to other industrial sectors, but the researchers have identified the potential of this innovative concept and DTs are being developed for various maritime applications such as surface ships, underwater vehicles [
43,
44], offshore platforms [
45,
46], coastal electrical power stations [
47], etc. Apart from the described examples, the limits to the application of DT technology are boundless, with numerous possible applications in the entire maritime domain. However, implementation is to be done by the marine industry with an opportunity-driven approach [
48]. These DT applications are intended to improve the existing operations in the marine industry while many novel innovations can also be found with revolutionary performances.
Most research work published on DT technology so far is based on the development of new concepts of DT technology in manufacturing (55%), while only a few are based on practical case studies (28%). Out of the published work, the majority (49%) are focused on production planning and control (PPC) in the manufacturing sector [
21], which is focused on Product Life Cycle Management (PLC) with the advent of DT-based solutions.
4.1. Embryonics in the Shipping Industry
DNV GL has tested a fully autonomous 60 m-long concept vessel, ReVolt, which is a battery-powered cargo carrier with zero crew [
49]. DT is an integral part of the design and testing of this conceptual vessel and the same will be utilized during the operation of the vessel. Testing of the vital systems is being carried out using the DT of the concept vessel, which has saved time and money. The same institution also provides a cloud networking solution, Veracity [
50], which can be used to design, access, and manipulate the data in DT. Similarly, Siemens has also launched the Mindsphere [
51] venture, which has governance capabilities and data management under the concept of Maritime Data Space (MDS) [
52], which is originally based on the concept of the Industrial Data Space (IDS) model. Meanwhile, it also allows for performing safety-critical tests and high-risk maneuvers for any number of attempts as desired in all varying conditions, which would have been a daunting task in a physical model. Using the historical data during the operational phase is used to predict the lifespan of components under varying conditions including position, dynamic environmental factors, speed, load conditions, etc. [
53]. The South African polar supply and research vessel “SA Agulhas II”, which operates in rural and risky arctic environments, has tested the feasibility of implementing a DT-based solution to operate with its benefits such as remote polar research capability, reduction of human impact on sensitive untouched environments, avail of real-time research data for scientists, etc. [
54]. Further, the “Probabilistic Twin” risk-management tool used by DNV-GL also aims to forecast the probable accidents/damages based on analysis of past data and trends as an extension to the existing Blue Denmark DT Solution [
55].
Having an unmanned vessel in connection to DT will deduct the human error factor in ship operation, and crew space can be spared for vital cargo space. Reduction of energy consumption and waiving of the extra maintenance expenses are other benefits of a DT-based system. Revolt itself is estimated to save a cost of 34 million USD in its 30 years of service life due to autonomous operation along with DT [
56]. Emission control is also a huge benefit in such a system. Reducing the machinery and moving parts will further reduce the downtime for maintenance/repairs, reduce human fatalities and be cost-efficient. The vessel can also be designed into a more aerodynamic shape due to the absence of the huge superstructure used for crew accommodation and bridge.
Not only the direct merchant sector, but even the fisheries, ecological and maritime archaeologists have opted for DT-based solutions for underwater operations. In projects such as SUSHI DROP in Sweden, AUVs are developed and operated in DT-based systems to monitor/survey the marine environment investigating the fish population in a large sea space [
57]. This DT-based module can further be incorporated into the ship’s HVAC system to optimize the heat usage and distribution in waste heat recovery systems, charge air coolers, heat exchangers, etc. [
58].
4.2. Vessel Life Cycle Management
Cost-saving is one main benefit of using the DT, as Condition-Based Predictive Maintenance (CBPM) is powered extensively with networked sensors, actuators, and control systems that are operated at their optimum condition. Prognostic Health Management (PHM) will be used with the projection of the state of the machinery with accurate data fidelity. It will further provide insight into failure modes, threshold settings, health indicators, and risks. With this analytic data, the operator will obtain the total domain awareness, which can be utilized to operate the physical unit at its prime operating condition or to make amends to optimize the performance. It further improves the predictability and management of real-time continuous quality control of marine diesel engine (MDE) critical parts with dynamic quality control starting from the machining stage of the components [
59]. The historical data derived from the DT will be used to compute the Remaining Useful Life (RUL) of mission-critical components of the ship’s systems. In DT-based CBPM solutions, data fusion [
60] is highly important to implement formidable evidence-driven big data sets taken using Bayesian Inference, Demster–Shafer reasoning, etc. [
61]. M. Xiang et al. proposed intelligent predictive maintenance using Implicit DT (IDT) formed with intelligent sensing, and reliable simulation data mapping with the historical operation data [
62]. Critical components such as the main engine can be digitally modelled as a Cycle Mean Value (CMV) model, allowing the monitoring of the performance in both the steady state and transient response [
63].
With the increasing visibility along with the real-time synching of high-fidelity models, monitoring of the physical system can be easily enhanced. Reduction of the time taken for system testing and development has led to the reduction of time to market by eliminating the risks of design failures. DT can provide a complete user experience even before the actual production. The entire operation of a ship within the total lifespan can be manipulated during the design phase with the support of its DT from a multi-user point of view (Passengers, Crew, Owner Company) [
64]. Further, real-time connection ensures the optimum operation of the actual system with the ability to analyze the performance of the physical model [
65]. It will further evaluate the existing ship’s machinery with the support of machine learning with a quantitative assessment of the degradation of the components. This will result in the intelligent diagnosis by an inferential decision model leading to more accurate predictions [
66]. These aspects will further support Structural Health Monitoring (SHM) and parameter trending of critical components of any machinery, aircraft, ship, plant, etc. [
67]. This augments the Model-Based System Engineering (MBSE) [
68,
69] with available tools for simulation, rehearsals, machine learning applications, etc. Vessel Traffic Service (VTS) is also supported by MBSE-based DT solutions. For example, the Diamond model concept proposed by Boeing Defence Company [
70] illustrates the DT-based MBSE.
4.3. Dockyard and Port Facility Augmentation
Not only the sea units, but also the shore establishments are predisposed to DT with advances in Building Information Modeling (BIM) [
71] with uplifted interoperability, planning, construction, and maintenance. A vast array of sensors from the building will feed generic data input to the façade DT of the structure, which will be processed for intended output to control the operation, site environmental control and other ergonomics. Already implementations are performed in Smart Home concepts [
72], which are highly successful in achieving the intended outcome. Further, Intelligent Manufacturing uses a knowledge-driven autonomous platform, which functions with dynamic knowledge bases along with a DT model [
73]. For example, the “smartBRIDGE” project initiated by Hamburg Port Authority, Germany, has implemented BIM-based DT to monitor the functions of the infrastructure and the process of extending to quay walls, locks, and other port infrastructural assets [
74]. These smart technologies will promote self-judgment, self-implementation, and self-development in autonomous manufacturing in the shipping industry.
Similarly, the factory design framework [
75] is also possible with an increase in productivity along with optimized floor utilization with modular-based DT. In such an operation, it can be developed into a Warehouse Management System (WMS) with the ability to customize the process as a Decision-Support Tool (DST) [
76]. It can connect the different value chains with eased-up system integration from the design, and production into the later stages of the lifecycle of a component. In the maritime section, dockyards around the world will be the main beneficiaries of such a DT-based solution.
Further, the DT solution will allow critical operations of a vessel operating at a far location to be handled by the experts in a shore base in an Augmented Reality-induced environment [
77]. This can be a routine operation to critical maintenance or fabrication task, which might require the intervention of an expert operator from a distant location. The Simulation and Remote Control Centre (SRCC) will perform a task beyond remote monitoring such as crane operation in various sea conditions [
78,
79].
4.4. Training and Testing Support
DT can be incorporated into the training of seafarers in Full Mission Simulators, Part Task Simulators or computer-based training systems. Part Task Simulators often use Hardware In the Loop (HIL) based solutions with real plants operating in parallel with a virtual platform [
80]. These platforms can ensure the safety of the personnel (trainers/trainees) along with the engagement of critical operations without endangering expensive real-life platforms. DNV-GL is using HIL testing, integration, and optimization of new control systems with a DT-based simulation platform and later goes for actual production with complete runnable executable solutions [
55]. Designers and equipment manufacturers will provide and share model parts with the shipbuilder where the complete outfit will be tested, leading to fewer errors and modifications during construction. In their “Nerves of Steel” venture, all hydrodynamic data were also simulated in varying sea conditions, leading to an efficient and safe hull design.
A DT model can be developed to address a specific problem, or it can be harnessed as an open data source ready to be manipulated by human, operational and environmental dimensions of a vessel or any other marine platform. It is a critical asset in enabling future technological advances in data-driven operations. Even producing a surrogate model is also possible using the original DT model, which can mimic the operation with less computational load, achieving the intended efficiency [
81].
Increasing user engagement is another advantage of a DT-based marine system. During the product design, the DT model can be tested to virtually test the interaction between the operator and the physical model [
65]. From that, data can be accumulated and processed to reflect the user habits, and the same can be incorporated to improve the physical model with naïve innovations. DT acts as a hub for technologies such as Big Data Analytics, IoT, machine learning, simulation, modelling, etc., providing a gateway to achieve much more complex analytical power to the operators and developers with the sensing data of the actual physical model contrasted with simulation data and Machine Learning algorithms.
4.5. Defence & Military Assets
DT is widely implemented on naval assets such as warships, submarines, maritime aircraft, etc. HIL testing is performed for the Naval Ship Combat Survivability Testbed (NSCST) [
82], which is a power-generating system redundancy checking simulation platform in warships of the US Navy. These DT-based simulators will be subjected to Individual Subsystem Actuators Control Tests, Multi Subsystem Integration Tests, Main Supervisory Control Tests and User Control Tests [
83]. Further, new naval air assets are demonstrated using their DT, which is used as a tool by prospective contractors to showcase their products to the Naval Air Command [
84]. The “Spiral development project” at Pearl Harbor and Portsmouth naval shipyards in the USA has optimized vessel trials using a new DT-based approach [
85]. New F110 class frigates developed by Navantia, Spain, used DT as an efficient life cycle management tool to address condition monitoring, maintenance, and casualty/damage/fault reaction [
86].
BAE Systems use DT technology in their latest Archerfish Mine Neutralization System [
87], which uses an AUV operated in a DT-based architecture to deploy mine-countermeasure action for underwater mooring and sea bottom mines with an unparallel Maritime Domain Awareness. It is further capable of developing a virtual 3D space with real ocean data such as currents, waves, and topography with real-time sensor data, which can lead to value-based reinforced learning followed by autonomous path planning [
88]. With the support of DT technology, Maritime Domain Awareness (MDA), mission readiness, Fleet Management and sustainment of a single Naval Force or even multinational task forces can be easily strengthened and augmented.
5. Developing a Ship Digital Twin Architecture
The virtues of the existing functionality of any surface vessel require a clear understanding of the planned design specifications along with the precise functionality of the various components, systems, and departments of the vessel. The standard actions of any of the existing surface vessels during her life cycle can be encapsulated in the following diagram (
Figure 5) [
89]. These eleven general functions will vary from ship to ship depending on the type and role of the vessel. However, these standard functionalities can be assisted and boosted with much fidelity and robustness using a DT-based solution.
Developers of the DT are focused mainly on three user groups for the system, company, operators, and researchers. DT will continuously communicate with the physical ship to update its data as per the real world to support the above-mentioned stakeholders with different demands during the complete product life cycle. Starting from the marketing phase of the vessel, DT will be functioning till the decommissioning stage of the ship. Designing as per the end user requirement and validation of the design with a 3D representation of the entire ship layout can be used extensively before the building phase.
5.1. Functional Requirements of User Groups
The DT of a fully autonomous ship will act as a complete controller of the vessel while regular manned vessels will act as a Digital Model or Digital Shadow to maintain the required data structure. A DT solution should be capable of performing the following actions to provide service to the three main stakeholders: onboard crew (if present), shore operator and researcher/engineer (
Figure 6).
A ship DT should be able to replicate all the Smart Functions [
34] of a digitalized surface ship, including the following mandatory requirements:
Structural Health Monitoring (SHM);
Machinery Health Monitoring (MHM);
Operational Performance Management (OPM);
Asset Efficiency Monitoring (AEM);
Crew Assistance and Augmentation (CAA).
Apart from the above functions, a robust communication link is to be established between the ship and the shore operator to obtain real-time situational awareness with complete control during the voyage. Digital images can act as a model, shadow or twin depending on the data handshake method. DT can be utilized to monitor and maintain the autonomous control of the vessel including self-navigation and collision avoidance. The formidable internal verification system generated due to the DT architecture will enhance the existing conceptual design optimization using virtual testing and intelligent process monitoring till the finalized model is developed [
90].
Since the data handled in a fully integrated DT Process Model (DTPM) will be large and complex, therefore the model must be composed of Design Data (DD), Process Data (PD), Process Perception Data (PPD), Historical Running Data (HRD) and Simulation Data (SD) targeting the whole product life cycle [
91]. Separate component schema for serialization of various components can be implemented covering the asset data, analysis and measured data of different segments of ships and can be shared among various stake holders [
92] (
Figure 7). The physical and control architecture of the future ships is also evolving each day with new concepts in improving the efficacy and efficiency of the vessels targeting economic and emission goals. Designing, testing, validating, and implementing a robust Digital Twin (DT) model for a surface ship will provide seamless support for the functioning of the ship/craft to its intended operation despite being an unmanned craft or a conventional crewed vessel.
5.2. Objectives of a Marine Digital Twin Framework
Overall, the DT framework should reflect the behavior of the vessel’s response to the environmental inputs such as forces of waves, current, wind, temperature, etc. The input sensors will be limited as per the requirement only with relevant design patterns based on the target evaluations of the vessel. These design patterns for DT-based vessels are extensively discussed by S. Erikstad from NTNU, Norway [
93], based on the original 23 design patterns derived by Gamma et al. in their classic book
Elements of Reusable Object-Oriented Software in the year 1994 [
94]. In this book, the following four design patterns for a ship DT have been proposed.
Structural Patterns: These are the main constituents of the DT package. It consists of the Product Data Model (PDM) of the DT that is formulated along with sensor-based big data of the vessel. The baseline is also a formulated source model derived from physics-based model behavior. Load-based sensor data are also acquired from the environment. The benchmark of the DT is to be designed to simulate the DT in parallel to the ship to compare anomalies. Finally, a Machine Learning Proxy layer can also be incorporated for DT to assist its behavior through ML rather than depending on the standard physics.
Creational Patterns: This is the realization of the DT as a proxy simulation tool. It will be a dynamic hybrid system with the ability to switch intelligently between ML and physics as per the situation. This can be either one vessel or an entire unmanned vessel fleet.
Insight Patterns: It is the layer of utilizing the DT that is operated with the ship. Anomaly patterns will be monitoring the deviation from normal operation and reverse analyzing to find the root cause for any abnormality in the system.
Computational Pattern: Designing the DT to perform efficiently with smart storage by a high-fidelity controlled regression to avoid data misconceptions. Offloading of data will also be performed with controlled dynamic regression offloading in physics analysis.
5.3. Appreciating the Future Dynamics
With the recent developments pertaining to software and hardware capabilities, IoT, Big Data Analytics, etc., the concept of DT has become a widely used technology in almost all sectors across the globe. DT is a key model portrayed in the main development strategies such as Industry 4.0 and Made in China 2025 (MIC 2025). The development of the Cyber-Physical Systems (CPS) architecture to transfigure the physical model into virtual space is a necessity to achieve the vision of the industrialists and researchers of the above development strategies [
95]. The shipping industry is an ideal platform to utilize the positive effects of CPS in the form of DT. “Information Technology and Industry integration” is one of the key factors in MIC 2025 and “High-Tech ships” is one of the 10 key targeted sectors in the strategy [
96]. In a similar example, the CyberFactory#1 project [
97] powered by Industry 4.0 focuses on CPC modelling with human, social and economic dimensions. Following key technologies can profoundly uplift the system integration of DT-based solutions.
5.3.1. Smart Port Compatibility
To create better management solutions and increase the efficiency levels of port operations using DT techniques, initiatives such Smart Port or Port 4.0 [
98] have become promising concepts. The digitalized port ecosystem will expect its stakeholders to follow the prerequisites to obtain or deliver the services. Automation will be the key component with supportive technologies such as IoT, AI, Smart Logistics [
99], Blockchain port operations [
100], DT, etc. With a similar intention, the “European Commission Roadmap for Waterborne Transportation Development Action Plan” [
101], which was formulated in the year 2019, strives towards the implementation of a digitalized smart port concept with the ultimate goals of improving the safety, security, efficiency, environmental soundness, transparency and improvement in workforce factors in present port systems. The United Kingdom, in their long-term strategy Maritime-2050, has also emphasized the ambitions of digitalization of ports in the process of moving towards Smart Ports [
102].
As the terminology itself portrays the correlation, Smart Ports will always be required to accommodate smart ships. Both systems will function hand in hand in energy management, navigation, communication, resource sharing, safety and security, marine environment conservation, intelligent awareness of each side’s strengths/limitations, etc. Necessary historical data and real-time data are to be shared at both regional and global levels. DTs of both ship and port will be able to function as the bridge between two smart systems.
The Port of Rotterdam in the Netherlands has already taken the initial step in adopting DT technology by establishing a sensor array using IoT technology and obtaining real-time mission-critical hydro and weather data for port operations. It obtains tidal data, salinity, wind speed, and direction from a combination of 44 sensors and analyzes them along with prediction models to provide complete digital visibility to the port control station [
103] and upbringing data to support the port governance and inter-port collaboration scheme [
104]. The Port of Antwerp in Belgium is also adding digitalized concepts for its operations. Apart from the functioning the level DT model, digitalized radar infrastructure port control is assisted by an autonomous network of drones to assert domain awareness, spill/waste detection, firefighting tasks, etc. [
105]. Further, Adelaide Port in Australia has optimized its container handling capacity by using AI-powered smart functions in the planning and utilization of assets in the terminal [
106]. The TwinSim project at Hamburg port, Germany, is also underway to achieve 3D visualization of the port functions in collaboration with sensor data and AI [
107]. However, the safety, physical security and cyber security of the smart port system [
108] will be an utmost concern and a challenge, where a single deviation/disruption can halt the entire operational flow.
With the current trend of port digital extension, future ships may be mandated to operate with smart functions along with a DT to maintain compatibility with the DT of the smart ports. The transformation from regular to digital will require successful meta-level organizational alignment with strategic coalitions of stakeholders [
109].
5.3.2. Incorporating Augmented Reality and Virtual Reality
Augmented Reality (AR) based applications are playing a pivotal role in the digitalization process, where the number of operations can be enhanced with AR-based solutions. It can be used as a presentation tool where interactive interfaces are utilized to visualize three-dimensional geometries and function as a supporting tool in executing the work while minimizing the errors incorporated in the manual process [
110]. Additional information along with the Standard Operating Procedure (SOP) can be superimposed to provide more guidance to the operator to perform the designated task. The author can specify the linkage between the geometries of the component and metadata including the drawings, plans, documents, and other service instructions supporting the execution of the relevant process. In this methodology, a camera tracks the base object while feeding the user interface with virtual images, objects, and texts of relevant data [
111]. AR-based service instructions can assist heavily in the application of CAA in the functioning of the smart functions onboard. At present, simulations play a vital role in the design decisions and validating of components/systems in the design, engineering, operation, and service phases of a product. DT-based AR functions realize all the aspirations of a seamless development of any critical product.
Virtual Reality (VR) is also a formidable domain that has stormed the digitalization process with its superior merits to the traditional 3D-based systems in providing more versatile information and interaction. It has already been utilized extensively in the shipbuilding industry with loaded CAD models in virtual environments with the facility to interact with them. A high-fidelity DT model will further allow virtual prototyping [
112] in reducing the cost incurred during the validation and testing phases of any new vessel. Assigned controller buttons are used to navigate within the virtual environment while manipulating the model with incorporated control modes. Traditional Marine Engineering Systems (MES) with 2D interfaces are replaced by these naïve simulation/user interfaces with much-improved geometric modelling procedures with model integration with optimizations, general arrangement, equipment specifications, etc. [
113]. Head-Mounted Displays (HMD) with room-scale tracking will allow the user to control the model within the 3D space along with motion-tracking handheld controllers. Eye tracking is used with interactive 3D screens in smaller applications while Cave Automatic Virtual Environment (CAVE) creates an immersive VR experience using projectors set to the entire room. These are used for training purposes due to cost concerns and the inability to produce high-definition output for real-time applications.
5.3.3. Artificial Intelligence
Artificial Intelligence (AI) will play a huge role in the development of DT in marine applications. Machine Learning (ML) has become a key component in AI-based systems in industrial applications. In a DT-based solution, the processing of large data sets can be incorporated with ML to reduce user participation in the training of the model. It can further conduit AI with Human Intelligence with effective integration processes in aspects such as remote sensing, social sensing, crowdsourcing, and analytics of the DT paradigm [
114]. The positivity of AI algorithms can be easily integrated into the DT model with Deep Learning (DL) techniques. Diagnostics and predictive forecasting can be incorporated into the DT with its neural network with a deep network from the acquisition of data to the training of the final algorithm [
115].
At present, applications of AI along with DT include Aerospace Industry, Driverless Automobiles, Intelligent Manufacturing, Smart City, Smart Home technology, etc. For example, real-time decision-making for pilots and Air Traffic Controllers (ATC) can be assisted by the AI-infused DT model in multiple scenarios with the aid of automation of various actions involved. It further supports collaborative decision-making in demanding situations with the ultimate aim of reducing the human factor in aviation operations [
116]. To increase the operational readiness, availability and safety of UAV operations, an Internal AI-based meta-analysis system is incorporated with a communication data link to a ground-based DT model [
117]. All these approaches are relevant to maritime applications, which demand similar navigation, control, communication, and operational requirements.
Self-driving cars with AI algorithms are already being used to minimize traffic accidents, increase fuel efficiency and ease driving including disabled personnel. For this, DT is essential to minimize failures and improve the ergonomics such as the Advanced Driver Assistance System (ADAS) in the Tesla Model-Y autopilot system [
118]. Trust in these automated systems will improve with the system development process adopted by Tesla using the AI-based models implemented by the company. These individual DTs will form a city-level DT network, which can be incorporated for various environmental, traffic, legal and any other deemed administrative process. In a space engineering breakthrough, autonomous cognition in spacecraft is achieved using a DT-based on-orbit data analysis system. It enables the satellite to perceive its self-state in real-time with changing environment [
119]. Similarly, marine applications also can be powered by AI within the designated DT architecture for autonomous operation with self-navigation, diagnostic and forecasting requirements, etc.
Similarly, a study by Heuijee Y. developed a simulation technique of the object detection, avoidance and lane detection algorithms in these AI-based vehicles using the online game GTA5 as a low-cost self-driving replication platform [
120]. For these smart vehicles, highway traffic mapping and modelling can be done through 3D GIS-assisted DT with multi-domain scale modelling [
121]. A similar approach can be manipulated using a ship simulator as a base platform to generate an AI-based self-navigation solution within the DT.
5.4. 4-Layer Digital Twin Framework for a Marine Vessel
From the initial contract of a ship until the final scrapping after decommissioning of the vessel, she will undergo various lifecycle phases with different actions in each stage. It will be governed by the functional requirements of the different stakeholders and Ship DT can provide valuable insights to support each activity in her design and development, validation, production, operations, and decommissioning stages. During the total lifespan of a ship, it will surpass the actions of marketing actions, the realization of the customer’s intended design, optimization of the designed model using various physical/simulated methodologies, monitoring the entire functionality during her operational phase with correct control of all the actions, prognostics, diagnostics, predictive maintenance, etc. The DT of a marine vessel can deliver and support all the actions with the merits of its inherent advantages. Hence, the following 4-layer DT framework (
Figure 8) is proposed in this paper with abstracted segments of Business, Tactical, Application and Operational Layers.
Business Layer: Initial specifications and ship owners’ requirements will be met with the design, marketing and business analytics performed with the support of the DT. Simulation and validation of the prototype will be efficient and effective with the incorporated DT model and all information will be shared with the project team of the shipbuilder, allowing easy project management through a modular shipbuilding approach.
Tactical Layer: This will be mainly manipulated by the onboard crew if present or by the shore operator if unmanned during the operational phase of the vessel. With Integrated Platform Management System in the DT with real-time health monitoring, navigation, communication, traffic control, load control and other ship functions will be governed with the support of DT with full integration of the ship’s systems.
Application Layer: This is the primary segment of handling the collected data within the ship, shore command center, and ocean environment. Big data handling and cloud-based operations will heavily rely on the communication data uplink and downlinks. Artificial Intelligence will play a major part in future unmanned autonomous vessels, thus providing the advantages generated by higher levels of autonomy in the operational cycle. Machine Learning/Deep Learning can be incorporated as sub-layers in this process.
Operational Layer: This is used at the functionality level of the shore operators and system engineers to support their intended operational plans and strategies. The acquired data through the DT can be deeply analyzed and manipulated in decision-making related to every life cycle phase of the vessel. Supply chain management, CBPM and system development will be key benefits that will be availed through the ship DT in this layer.
The above framework is proposed as a common generic architecture and it can be easily modified, transformed, and adopted as per the user requirements. DT will be available for every patron in the hierarchy of ships operation with dedicated access to the intended data and information. A DT of any ship or offshore structure will be designed to render its present state and behavior with real-time updates in a continuous manner. This update will not only be limited to the data handshake, but also the continuous addition of parallel components to support different functions introduced in different stages of the vessel lifecycle. It will be identical to the physical asset cardinality covering all functions representing the engineering model with all possible metadata in the real-time state.
6. Scientometric Analysis of Digital Twin in the Maritime Domain
In this study, a scientometric analysis is performed with complete insight into the DT technology and to obtain a better approach to the past research work. This critical analysis and reflection will formulate recommendations with a complete mapping of available literature to visualize the pathways of previous work.
6.1. Methodology and Tools
It is thoroughly synthesized to obtain the exact outcome of the dataset derived from the large database obtained from Web of Science (WoS) [
122] and refined the scientometric indicators to obtain the intended research data. In this study, the WoS inbuilt analytical tools were also used to provide a basic overview of the selected database of past research with a graph-based visualization. To obtain the visual analytics of the data set, computation tools of CiteSpace and VOSviewer are used in understanding how DT has evolved over the past passing intellectual turning points that are evident along the critical path, and the topics have attracted attention, thus synthesizing the development of DT closely and extensively [
123,
124].
Using the two analytical software, the database obtained from WoS is analyzed to generate the outcomes such as top authors, articles, journals with emerging literature, development, the impact of collaboration and intellectual dynamics to understand the vast subject area of DT in the maritime domain (
Figure 9). In this study, research publications available in WoS Core Collection were considered from the years 2002 to 2022 (20 Years) as the DT concept was initially brought out in the year 2002. This comprehensive database includes all dominant journals and publications including IEEE Explore, MDPI, Elsevier, Springer, Emerald, Wiley online library, Taylor & Francis, etc.
Keywords were selected based on the target data set using required Booleans as stated below. The search was performed in WoS Core collection targeting the documents with the search equation of
Search results provided 955 multilingual publications related to the above-narrowed research area targeting the exact timespan (
Table 1).
Based on the search results, visualizations of (1) Publication History Analysis, (2) Countries/Region Analysis, (3) Authors Contribution Analysis, (4) Cited Authors Analysis, and (5) Keyword Analysis were carried out using the analytical tools available in WoS, VOSviewer and CiteSpace. Respective analysis data and logical discussion against each step of the scientometric analysis process are described below.
6.2. Analysis of the Dataset
6.2.1. Publication History Analysis
The 955 publications found in the WoS dataset were analyzed and visualized based on the published year of the article chronologically. Starting with 14 publications in the year 2002, the number of articles published in the year is 231 records in 2022 with a percentage value of 24.2% of the bulk. It is 137% more than the previous year (2021), and the trend is set towards more increments in the coming years (
Figure 10).
When we critically examine the holistic picture, we can observe the rapid increase in publications during the last five years, which indicates the blooming of DT technology within the maritime sector. From the year 2002 until the year 2017, an almost similar annual number of research articles have been published, but the same year has marked the takeoff year for the current trend. In the early years, very few publications originated, and these statistics may have been affected by the deficiencies of technology and knowledge gaps in early developments. Even the COVID-19 pandemic period has not affected the steep increment of the number of publications which have been launched from the year 2018. A similar trend line can be observed in similar studies performed by researchers on the DT applications and surrounding technologies in different disciplines such as in the manufacturing domain [
125], business analytics [
126], etc. Hence, the existing trend suggests more research work related to maritime DT concepts is underway and being published at present.
6.2.2. Analysis of Countries/Regions in Research Contribution
Figure 11 indicates that China has been the key stakeholder of research in DT towards the maritime industry with a 26% share of publications, whereas the USA is ranked second with 133 publications. Further, Europe has contributed a considerable impact on the scientific research of DT. With the ongoing research trend and industry innovations, many other regions of the world will also expect to produce more impact on the fast-growing technology. The concept of DT is still evolving with the latest technological inductions in the maritime domain, which has opened opportunities mostly for developed nations to conduct research and development of DT technology in the marine sector and produce good results over the past two decades.
6.2.3. Authors’ Contribution Analysis
A comparison of the authors was performed considering the number of records in the database of the specific field with an insight into their corresponding profile (
Figure 12). It is comprehended that “Rodriguez-tovar FJ” with 24 publications is the leading author, and the second author, ”Dorador Jr”, with a strong link with the No. 1 author in the same cluster, has published 17 records. “Corigliano P” (5 articles), and “Gonzalez-cancelas N” (5 articles) are in the 3rd and 4th position, respectively. Following the recent trend in DT adoption, more contributions are expected at a rapid rate in the following years from the research community.
Very little collaborative research is found among leading authors in the selected dataset as illustrated in
Figure 13, where Rodriguez-Tovar and Francisco J. have the most collaborative publications. Since DT is a new-born concept for the maritime domain, it is observed that less cooperation is visible among the leading researchers. The major bloom started after the year 2017 and was succeeded soon by the COVID-19 pandemic. Due to the inflicted health risks, facility outreaches, travel restrictions and association barriers, the collaboration between the researchers must have had a negative impact on undergoing combined and collaborative research works. As we are now witnessing the probable end of the pandemic, more collaboration is expected among the research community towards the development of DT technology in the global maritime sphere.
6.2.4. Cited Authors Analysis
The impact of the respective authors and the collaboration efforts is studied using the citation data (number of citations, citation numbers, citation bursts, centrality, etc.) derived using the CiteSpace analytics. The achieved data are depicted in
Figure 14. There are 7 different clusters with varying silhouette values, and all can be considered reasonable depending on the value. Van D is found to be the highest-cited author with 76 citations for his publication, while Doradore J remains in second place with 24 citations.
Further, five references have achieved the strongest citation burst in their respective years, while Hodell D achieved the highest rate (strength 3.81) for his record published in 2013 and the burst commenced in 2014 and ended in 2016 (
Table 2). The co-citation reference network visualized by VOSviewer indicates the development of the concept over time and 6 major clusters of collaborative research work within the timeframe from 2014 to 2022 (
Figure 15).
6.2.5. Keywords Analysis
Research subjects are often generated and influenced by the coexistence of the keywords amongst various publications making a deliberate trend for parallel research bases. CiteSpace keyword analysis was performed on the exported WoS database and the following visualization with highlighting of the prominent nodes indicating the highest counter and centrality (
Figure 16).
It is observed that the frequency burst of most of these keywords occurred from 2016 to date, indicating the recent and ongoing research prominence among the research community. These keywords can provide an overview of the current trending research work within the maritime domain. Further, the available timeline view in CiteSpace brought up the progression of DT in the marine sector with the initial step of “Digitalization” (#0-First Node) leading the pathway passing cluster titles such as “digital image correlation”, “remote sensing”, “automatization”, “port digitization” and finally to “Digital Twin” (#9-Ninth Node). This further provides substantial validation to the pathway of implementing DT technology within the maritime domain as discussed in the articles from initial digitalization, smart ports towards the final implementation of DT technology.
6.2.6. Results and Discussion
It is an evident fact that DT has had a slower beginning from its inception in the year 2002 up to the year 2017, but it has been thriving with major applications/achievements among researchers around the world. The present trend in publications related to DT technology in the maritime sector is following an exponential increment, which is also a promising factor in generating innovative avenues for the future industry. Further, the published data originated from almost all regions of the world, which emphasizes the attention received from the research communities around the world. The leading researchers are highlighted in the analysis along with the trending keywords within the highlighted domain, which will give insight to new researchers for their follow-up actions. Although cross-border and cross-discipline research work has occurred less in recent years, more collaborative research work is expected along with the easing of COVID-19 pandemic-imposed restrictions, which will generate a more positive impact on the progression of technology.
7. Challenges and Future Developments in Marine Digital Twin Technology
DT is at the infancy stage when it comes to implementation in the shipping industry. Limited research is conducted and implemented in projects compared to other industries such as aerospace, manufacturing, agriculture, construction, city planning, etc. The effectiveness of the Cyber-Physical Fusion [
132] will be another key encounter. The following salient points can be prominently identified as the bottlenecks posed to the progression and implementation of this naïve technology within the maritime sector.
Lack of necessary infrastructure within the existing maritime industry.
Lack of software and hardware skills among various levels of stakeholders.
Limited connectivity due to data transmission restrictions at sea.
Communication barrier between the underwater vehicles (Submarines and UAVs) with the shore-operated DT.
The reluctance to transition to digital systems from long-used manual hardware platforms.
Knowledge gap of the DT technology and benefits reaching the industry as mostly academia is engaged in the research and development stage.
Lack of research collaboration among key researchers/institutes.
Technology readiness is lagging while concept development is at full throttle.
Data security complications in dealing with confidentiality, non-repudiation, and authentication.
Large data handling barriers in data retention, accessibility, and visualization.
Very limited research has been conducted on the functioning of DT in the retiring/decommissioning phase.
With the known limitations highlighted above, DT has recently emerged as one of the most powerful tools with the aid of high-tech computational resources, AI functions, Big Data Analytics, etc. Thus, the same is being vastly adopted by academia, industry, and research organizations. In the maritime domain, one of the most critical aspects is communication, which is a mandatory prerequisite for any DT-based system. The data link between the onshore, offshore, or underwater physical model with the DT is to be established with continuous synchronization. With the development of satellite links and shore-based networks for coastal navigating vessels, DT is becoming much more practical for real-time implementations. Comprehensive data exchange and a model-based review process are to be inducted into existing manual operations. It will enable achieving a full Model-Based Definition (MBD) [
133], which is mandatory in the DT implication process. However, a Digital Shadow or a Digital Model is a possibility by updating the digital image manually or whenever the communication link is established. A collaborative data handshake is mandatory with a cohesive data network accessed by all stakeholders [
94]. Missing data or faulty data due to sensor failures can create an entire system failure in a DT-based system. This data should be coherent without any disparity to function in DT modules with the ability to unify the data among the cooperating partners. Further, most industries pose scattered ownership of data and the same are maintained in different formats, interfaces and software [
134]. Unification and standardization of these mandatory data policies in DT can be a challenge.
Furthermore, with the development of more robust underwater communication technologies, in the future, DT solutions will come into play with automated submarines and other underwater applications. DT-based solutions will be able to overcome the communication gaps in AUV operations incorporating continuous research and development will be the key to imposing a complete transition from existing obsolete platforms to DT-based suits within the maritime industry.
It has been evident from the literature survey that DT technology has tremendous potential across various segments in the maritime domain and despite being in its early stages of implementation, worldwide research and development efforts are underway.
Currently, DT technology is primarily used for monitoring and simulation in the maritime domain, but its usage is expected to expand to other areas such as predictive maintenance, asset management, and decision-making. As the maritime industry shifts towards interconnectivity and collaboration, it is believed that DTs will play a crucial role in supporting and enhancing these efforts. In particular, the integration of DT technology with ASVs/AUVs is poised to play a significant role in connecting to future smart functions utilized by various stakeholders in the industry. AI is expected to be a key component in the DT functionality, where the least human intervention will be made possible in operating complex scenarios. Thus, the future of DT technology in the maritime domain is very bright, with continued technological advancements and increasing adoption expected in the coming years.
8. Conclusions
In this study, a comprehensive literature review has been performed to explore the applications of DT technology within the maritime domain. Since its introduction in the early 2000s, DT technology has progressed at a slower pace due to the absence of necessary components such as hardware, software, remote sensing techniques, cloud computing, big data analytics, digital manufacturing architecture, and satellite communication facilities. Despite the limited implementation of DTs in real-life projects during the early years of the millennium, the recognition of its capabilities and potential has led to its increasing adoption in the manufacturing and service sectors of the maritime industry. With the abundance of computational resources and recent emergent trends in AI-based technologies, DT is likely to become an effective solution for validating state-of-the-art designs in a virtual environment, resulting in significant time and cost savings. Many projects are already underway in many parts of the world to acquaint the existing operations with DT-based solutions in designing, monitoring, manufacturing, training, testing, simulations, etc. Based on the bibliometric study performed using scientometric analysis, it can be deduced that there is a growing trend of incorporating DTs into maritime operations as the industry becomes increasingly digitized and electrified. The proposed four-layer ship DT framework in this study has compiled and deduced these necessities to be addressed within the maritime sector and can be utilized as a base model in designing a comprehensive DT architecture covering the life cycle of a ship. The majority of the DT projects in the maritime sector are still in the developing stage with limited research work/data available on the subject. However, by observing the current bloom in technology and research trends on DT-based systems, it can be concluded that the potential of DT will revolutionize the maritime sector, especially the shipping and offshore engineering sectors with expected major outcomes in achieving high-tech-based design, development, manufacturing, and operations.
Author Contributions
Conceptualization, X.X. and S.Y.; methodology, S.Y. and X.X.; investigation, N.S.M., Y.F., S.Y. and X.X.; formal analysis, N.S.M. and S.Y.; resources, X.X. and S.Y.; writing—original draft preparation, N.S.M.; writing—review and editing, N.S.M., S.Y. and X.X. All authors have read and agreed to the published version of the manuscript.
Funding
This work is partially supported by the National Natural Science Foundation of China, grant number 52131101 and the Hubei Provincial Natural Science Foundation for Innovation Groups, grant number 2021CFA026.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Li, S.; Xu, L.D.; Zhao, S. The Internet of Things: A Survey. Inf. Syst. Front. 2015, 17, 243–259. [Google Scholar] [CrossRef]
- Asthon, K. That ’Internet of Things’ Thing. RFiD J. 2010, 22, 97–114. [Google Scholar]
- Lv, Z.; Xie, S. Artificial Intelligence in the Digital Twins: State of the Art, Challenges, and Future Research Topics. Digit. Twin 2021, 1, 12. [Google Scholar] [CrossRef]
- Enyedi, S.; Miclea, L. IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR). Proc.-Int. Test Conf. 2019, 2019, 2–4. [Google Scholar] [CrossRef]
- El Saddik, A. Digital Twins: The Convergence of Multimedia Technologies. IEEE Multimed. 2018, 25, 87–92. [Google Scholar] [CrossRef]
- Huggins, D. The Treatment of Mixed Helminthic Infections with Oxantel/Pyrantel. Folha Med. 1978, 76, 475–478. [Google Scholar]
- Hehenberger, P.; Bradley, D. Mechatronic Futures: Challenges and Solutions for Mechatronic Systems and Their Designers; Springer International Publishing: Midtown Manhattan, NY, USA, 2016; ISBN 9783319321561. [Google Scholar]
- Taking Flight with the Airbus “Iron Bird”—Commercial Aircraft—Airbus. Available online: https://www.airbus.com/newsroom/news/en/2017/05/taking-flight-with-the-airbus-iron-bird.html (accessed on 3 December 2019).
- Renaudin, C.P.; Barbier, B.; Roriz, R.; Revel, D.; Amiel, M. Coronary Arteries: New Design for Three-Dimensional Arterial Phantoms. Radiology 1994, 190, 579–582. [Google Scholar] [CrossRef]
- Grieves, M. Foreword. Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems. In Transdisciplinary Perspectives on Complex Systems; Springer: Berlin/Heidelberg, Germany, 2016; pp. 85–113. [Google Scholar] [CrossRef]
- Shaſto, M.; Conroy, M.; Doyle, R.; Glaessgen, E.; Kemp, C.; LeMoigne, J.; Wang, L. Modeling, Simulation, Information Technology & Processing Roadmap-NASA. Natl. Aeronaut. Space Adm. 2012, 32, 1–38. [Google Scholar]
- Endsley, M.; Headquarters U.S. Air Force during 2010–2030: The Air Force is critically dependent on science & technology advances. In Proceedings of the Presentation at the USAF Science and Technology 2030 Conference, Dayton, OH, USA, 14–15 June 2010. [Google Scholar]
- GitHub-Evanderhorn/DSS_DT_Public. Available online: https://github.com/evanderhorn/DSS_DT_Public (accessed on 29 December 2022).
- Jones, D.; Snider, C.; Nassehi, A.; Yon, J.; Hicks, B. Characterising the Digital Twin: A Systematic Literature Review. CIRP J. Manuf. Sci. Technol. 2020, 29, 36–52. [Google Scholar] [CrossRef]
- Alam, K.M.; Saini, M.; El Saddik, A. Toward Social Internet of Vehicles: Concept, Architecture, and Applications. IEEE Access 2015, 3, 343–357. [Google Scholar] [CrossRef]
- Atzori, L.; Iera, A.; Morabito, G. The Internet of Things: A Survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Karve, P.M.; Guo, Y.; Kapusuzoglu, B.; Mahadevan, S.; Haile, M.A. Digital Twin Approach for Damage-Tolerant Mission Planning under Uncertainty. Eng. Fract. Mech. 2020, 225, 106766. [Google Scholar] [CrossRef]
- Ibrion, M.; Paltrinieri, N.; Nejad, A.R. On Risk of Digital Twin Implementation in Marine Industry: Learning from Aviation Industry. J. Phys. Conf. Ser. 2019, 1357, 012009. [Google Scholar] [CrossRef]
- Abramovici, M.; Göbel, J.C.; Savarino, P. Reconfiguration of Smart Products during Their Use Phase Based on Virtual Product Twins. CIRP Ann.-Manuf. Technol. 2017, 66, 165–168. [Google Scholar] [CrossRef]
- Kritzinger, W.; Karner, M.; Traar, G.; Henjes, J.; Sihn, W. Digital Twin in Manufacturing: A Categorical Literature Review and Classification. IFAC-Pap. 2018, 51, 1016–1022. [Google Scholar] [CrossRef]
- Vissamsetty, S.; Updhyayula, R.S. Study of Alternate Engine Propulsion Systems to Reduce CO2. In Proceedings of the ICSOT: Technological Innovations in Shipbuilding, Indian Maritime University, Visakhapatnam, India, 12–13 December 2013; pp. 127–142. [Google Scholar]
- Bolvashenkov, I.; Herzog, H.G.; Rubinraut, A.; Romanovskiy, V. Possible Ways to Improve the Efficiency and Competitiveness of Modern Ships with Electric Propulsion Systems. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014. [Google Scholar] [CrossRef]
- M/s Vandal—A Historical Ship—Nobel Brothers. Available online: https://www.branobelhistory.com/innovations/m-s-vandal-a-historical-ship/ (accessed on 16 April 2023).
- Paul, D. A History of Electric Ship Propulsion Systems [History]. IEEE Ind. Appl. Mag. 2020, 26, 9–19. [Google Scholar] [CrossRef]
- Parker, D.S.; Hodge, C.G. The Electric Warship. Power Eng. J. 1998, 12, 5–13. [Google Scholar] [CrossRef]
- Propulsion Systems Used in Modern Naval Vessels—Naval Post—Naval News and Information. Available online: https://navalpost.com/propulsion-systems-navies-gas-diesel-electric/ (accessed on 16 April 2023).
- Doerry, N.; Amy, J.; Krolick, C. History and the Status of Electric Ship Propulsion, Integrated Power Systems, and Future Trends in the U.S. Navy. Proc. IEEE 2015, 103, 2243–2251. [Google Scholar] [CrossRef]
- World’s First All-Electric Fast Ferry Named in Norway. Available online: https://www.offshore-energy.biz/worlds-first-all-electric-fast-ferry-named-in-norway (accessed on 12 February 2023).
- USS Zumwalt (DDG-1000)—Modern Warships—World of Warships Official Forum. Available online: https://forum.worldofwarships.eu/topic/639-uss-zumwalt-ddg-1000/ (accessed on 29 May 2020).
- Sulligoi, G.; Vicenzutti, A.; Menis, R. All-Electric Ship Design: From Electrical Propulsion to Integrated Electrical and Electronic Power Systems. IEEE Trans. Transp. Electrif. 2016, 2, 507–521. [Google Scholar] [CrossRef]
- Gilligan, B.K. Electric Ship Digital Twin: Framework for Cyber-Physical System Security; Massachusetts Institute of Technology, Department of Mechanical Engineering: Cambridge, MA, USA, 2019. [Google Scholar]
- Erikstad, S.O. Designing Ship Digital Services. In Proceedings of the Compit’19, Tullamore, Ireland, 3 April 2019; pp. 458–469. [Google Scholar]
- Schumann, C.-A.; Baum, J.; Forkel, E.; Otto, F. Digital Transformation and Industry 4.0 as a Complex and Eclectic Change. Futur. Technol. Conf. 2017, 2017, 645–650. [Google Scholar]
- American Bureau of Shipping. Guidance Notes on Smart Function Implementation. Houston, TX, USA. 2018. Available online: https://ww2.eagle.org/content/dam/eagle/rules-and-guides/current/other/guidance-notes-smart-function-implementation.pdf (accessed on 5 January 2023).
- Rolls-Royce and Wartsila in Close Race with Autonomous Ferries. Available online: https://www.maritime-executive.com/article/rolls-royce-and-wartsila-in-close-race-with-autonomous-ferries (accessed on 5 December 2019).
- Liu, M.; Fang, S.; Dong, H.; Xu, C. Review of Digital Twin about Concepts, Technologies, and Industrial Applications. J. Manuf. Syst. 2021, 58, 346–361. [Google Scholar] [CrossRef]
- Autonomous Shipping. Available online: https://www.imo.org/en/MediaCentre/HotTopics/Pages/Autonomous-shipping.aspx (accessed on 22 February 2023).
- Kaber, D.B. Issues in Human-Automation Interaction Modeling: Presumptive Aspects of Frameworks of Types and Levels of Automation. J. Cogn. Eng. Decis. Mak. 2018, 12, 7–24. [Google Scholar] [CrossRef]
- Li, J.; Xiang, X.; Yang, S. Robust Adaptive Neural Network Control for Dynamic Positioning of Marine Vessels with Prescribed Performance under Model Uncertainties and Input Saturation. Neurocomputing 2022, 484, 1–12. [Google Scholar] [CrossRef]
- Development and Missions of Unmanned Surface Vehicle. Available online: https://cetcusv.en.ecplaza.net/ (accessed on 27 February 2023).
- Wang, Z.; Yang, S.; Xiang, X.; Vasilijević, A.; Mišković, N.; Nađ, Đ. Cloud-Based Mission Control of USV Fleet: Architecture, Implementation and Experiments. Control. Eng. Pract. 2021, 106, 104657. [Google Scholar] [CrossRef]
- Alsos, O.A.; Veitch, E.; Pantelatos, L.; Vasstein, K.; Eide, E.; Petermann, F.M.; Breivik, M. NTNU Shore Control Lab: Designing Shore Control Centres in the Age of Autonomous Ships. In Proceedings of the International Maritime and Port Technology and Development Conference (MTEC) & The 4th International Conference on Maritime Autonomous Surface Ships, Singapore, Singapore, 5–7 April 2022; Volume 2311. [Google Scholar]
- Ahmed, F.; Xiang, X.; Jiang, C.; Xiang, G.; Yang, S. Survey on Traditional and AI Based Estimation Techniques for Hydrodynamic Coefficients of Autonomous Underwater Vehicle. Ocean Eng. 2023, 268, 113300. [Google Scholar] [CrossRef]
- Li, J.; Xiang, X.; Dong, D.; Yang, S. Prescribed Time Observer Based Trajectory Tracking Control of Autonomous Underwater Vehicle with Tracking Error Constraints. Ocean Eng. 2023, 274, 114018. [Google Scholar] [CrossRef]
- Nassar, W.M.; Anaya-Lara, O.; Ahmed, K.H.; Campos-Gaona, D.; Elgenedy, M. Assessment of Multi-Use Offshore Platforms: Structure Classification and Design Challenges. Sustainability 2020, 12, 1860. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Reda, A.; Butler, H.O.; Ja’e, I.A.; An, C. Review on Fixed and Floating Offshore Structures. Part I: Types of Platforms with Some Applications. J. Mar. Sci. Eng. 2022, 10, 1074. [Google Scholar] [CrossRef]
- Lee, K.H.; Kim, M.G.; Lee, J.I.; Lee, P.S. Recent Advances in Ocean Nuclear Power Plants. Energies 2015, 8, 11470–11492. [Google Scholar] [CrossRef]
- Taylor, N.; Human, C.; Kruger, K.; Bekker, A.; Basson, A. Comparison of Digital Twin Development in Manufacturing and Maritime Domains Nicole. Stud. Comput. Intell. 2019, 853, 158–170. [Google Scholar] [CrossRef]
- The ReVolt-DNV GL. Available online: https://www.dnv.com/research/maritime/publications.html (accessed on 5 February 2023).
- Veracity by DNV. Available online: https://www.veracity.com/ (accessed on 1 January 2023).
- Siemens | MindSphere. Available online: https://siemens.mindsphere.io/en (accessed on 1 January 2023).
- Rødseth, Ø.J.; Berre, A.J. From Digital Twin to Maritime Data Space: Transparent Ownership and Use of Ship Information. In Proceedings of the 13th International Symposium on Integrated Ship’s Information Systems & Marine Traffic Engineering Conference ISIS-MTE 2018, Berlin, Germany, 27–28 September 2018; pp. 1–8. [Google Scholar]
- Danielsen-Haces, A. Digital Twin Development—Condition Monitoring and Simulation Comparison for the ReVolt Autonomous Model Ship. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2018. [Google Scholar]
- Bekker, A. Exploring the Blue Skies Potential of Digital Twin Technology for a Polar Supply and Research Vessel. Mar. Des. XIII 2018, 1, 135–146. [Google Scholar]
- Bruun, K. Digital Twins for Blue Denmark; 2018-0006; DNV GL: Batam City, Indonesia, 2018. [Google Scholar]
- ReVolt—Next Generation Short Sea Shipping—DNV GL. Available online: https://www.dnv.com/ (accessed on 22 March 2019).
- Lambertini, A.; Menghini, M.; Cimini, J.; Odetti, A.; Bruzzone, G.; Bibuli, M.; Mandanici, E.; Vittuari, L.; Castaldi, P.; Caccia, M.; et al. Underwater Drone Architecture for Marine Digital Twin: Lessons Learned from SUSHI DROP Project. Sensors 2022, 22, 744. [Google Scholar] [CrossRef]
- Manngård, M.; Lund, W.; Björkqvist, J. Using Digital Twin Technology to Ensure Data Quality in Transport Systems. In Proceedings of the TRA2020 Rethinking transport, Helsinki, Finland, 12 March 2020; pp. 27–30. [Google Scholar]
- Cheng, D.J.; Zhang, J.; Hu, Z.T.; Xu, S.H.; Fang, X.F. A Digital Twin-Driven Approach for On-Line Controlling Quality of Marine Diesel Engine Critical Parts. Int. J. Precis. Eng. Manuf. 2020, 21, 1821–1841. [Google Scholar] [CrossRef]
- Castanedo, F. A Review of Data Fusion Techniques. Sci. World J. 2013, 2013, 704504. [Google Scholar] [CrossRef]
- Liu, Z.; Meyendorf, N.; Mrad, N. The Role of Data Fusion in Predictive Maintenance Using Digital Twin. AIP Conf. Proc. 2018, 1949, 02002. [Google Scholar] [CrossRef]
- Xiong, M.; Wang, H.; Fu, Q.; Xu, Y. Digital Twin–Driven Aero-Engine Intelligent Predictive Maintenance. Int. J. Adv. Manuf. Technol. 2021, 114, 3751–3761. [Google Scholar] [CrossRef]
- Bondarenko, O.; Fukuda, T. Development of a Diesel Engine’s Digital Twin for Predicting Propulsion System Dynamics. Energy 2020, 196, 117126. [Google Scholar] [CrossRef]
- Arrichiello, V.; Gualeni, P. Systems Engineering and Digital Twin: A Vision for the Future of Cruise Ships Design, Production and Operations. Int. J. Interact. Des. Manuf. 2020, 14, 115–122. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, M.; Nee, A.Y.C. Digital Twin Driven Smart Manufacturing; Elsevier Academic Press: Cambridge, MA, USA, 2019; Volume 53, ISBN 9788578110796. [Google Scholar]
- Helman, J.; Bernard, O.; Bellouard, Y. The Application and Challenge of Digital Twin Technology in Ship Equipment. In Proceedings of the 2021 International Conference on Mechanical Engineering, Intelligent Manufacturing and Automation Technology (MEMAT 2021), Guilin, China, 23–25 April 2021; Volume 1939, p. 012068. [Google Scholar] [CrossRef]
- Li, C.; MahaDeVan, S.; Ling, Y.; Choze, S.; Wang, L. Dynamic Bayesian Network for Aircraft Wing Health Monitoring Digital Twin. AIAA J. 2017, 55, 930–941. [Google Scholar] [CrossRef]
- Madni, A.M.; Madni, C.C.; Lucero, S.D. Leveraging Digital Twin Technology in Model-Based Systems Engineering. Systems 2019, 7, 7. [Google Scholar] [CrossRef]
- ÜZÜMCÜ, S.; MERT, A.A.; ATAY, F. Usage of Digital Twin Technologies during System Modeling and Testing in Vessel Traffic Services System Project. In INCOSE International Symposium; John and Wiley and Sons: Hoboken, NJ, USA, 2019; Volume 29, pp. 189–202. [Google Scholar]
- Tracing the Origins of Boeing’s “Diamond” from Apollo to NMA—The Air Current. Available online: https://theaircurrent.com/aircraft-development/tracing-the-origins-of-boeings-diamond-from-apollo-to-nma/ (accessed on 17 April 2023).
- Khajavi, S.H.; Motlagh, N.H.; Jaribion, A.; Werner, L.C.; Holmström, J. Building Information Modeling.Pdf. In Digital Twin: Vision, Benefits, Boundaries, and Creation for Buildings; IEEE: New York, NY, USA, 2019; p. 14. [Google Scholar]
- Marikyan, D.; Papagiannidis, S.; Alamanos, E. A Systematic Review of the Smart Home Literature: A User Perspective. Technol. Forecast. Soc. Chang. 2019, 138, 139–154. [Google Scholar] [CrossRef]
- Zhou, G.; Zhang, C.; Li, Z.; Ding, K.; Wang, C. Knowledge-Driven Digital Twin Manufacturing Cell towards Intelligent Manufacturing. Int. J. Prod. Res. 2020, 58, 1034–1051. [Google Scholar] [CrossRef]
- Hamburg Port Authority—SmartBRIDGE Hamburg—World Port Sustainability Program. Available online: https://sustainableworldports.org/project/hamburg-port-authority-smartbridge/ (accessed on 19 April 2023).
- Guo, J.; Zhao, N.; Sun, L.; Zhang, S. Modular Based Flexible Digital Twin for Factory Design. J. Ambient Intell. Humaniz. Comput. 2019, 10, 1189–1200. [Google Scholar] [CrossRef]
- Baruffaldi, G.; Accorsi, R.; Manzini, R. Warehouse Management System Customization and Information Availability in 3pl Companies: A Decision-Support Tool. Ind. Manag. Data Syst. 2019, 119, 251–273. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, J.; Chemori, A.; Xiang, X. Virtual Submerged Floating Operational System for Robotic Manipulation. Complexity 2018, 2018, 9528313. [Google Scholar] [CrossRef]
- Major, P.; Li, G.; Zhang, H.; Hildre, H.P. Real-Time Digital Twin of Research Vessel for Remote Monitoring. Proc.-Eur. Counc. Model. Simul. ECMS 2021, 35, 159–164. [Google Scholar] [CrossRef]
- Norwegian University of Science and Technology—NTNU. Available online: https://www.ntnu.edu/ (accessed on 4 November 2022).
- Mukha, M.; Karianskyi, S. Real-time Propulsion Plant Simulation and HIL Implementation. In Proceedings of the 13th International Conference on Engine Room Simulators, Odessa, Ukraine, 20–21 September 2017. [Google Scholar]
- Asher, M.J.; Croke, B.F.W.; Jakeman, A.J.; Peeters, L.J.M. A Review of Surrogate Models and Their Application to Groundwater Modeling. Water Resour. Res. 2015, 51, 5957–5973. [Google Scholar] [CrossRef]
- Sudhoff, S.D.; Pekarek, S.; Kuhn, B.; Glover, S.; Sauer, J.; Delisle, D. Naval Combat Survivability Testbeds for Investigation of Issues in Shipboard Power Electronics Based Power and Propulsion Systems. In Proceedings of the IEEE Power Engineering Society Transmission and Distribution Conference, Chicago, IL, USA, 21–25 July 2002; Volume 1, pp. 347–350. [Google Scholar]
- Dufour, C.; Soghomonian, Z.; Li, W. Hardware-in-the-Loop Testing of Modern On-Board Power Systems Using Digital Twins. In Proceedings of the 2018 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 118–123. [Google Scholar] [CrossRef]
- Naval Air Systems Command (NAVAIR) Digital Twin Technologies to Improve Mission Readiness and Sustainment. Available online: https://www.navysbir.com/n20_2/N202-105.htm (accessed on 19 April 2023).
- Navy Optimizing Shipyards with Digital Twin Technology. Available online: https://www.nationaldefensemagazine.org/articles/2021/3/1/navy-optimizing-shipyards-with-digital-twin-technology (accessed on 19 April 2023).
- Silvera, J.I.; Luis, J.L.; Luquero, J.M.; Bustelo, M. Navantia’s Digital Twin Implementation Perspective in Military Naval Platform Life Cycle Report. 2022, Volume 1, pp. 1–30. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&cad=rja&uact=8&ved=2ahUKEwiurb3NkOr-AhU3yLsIHZ_ABMwQFnoECAoQAQ&url=https%3A%2F%2Fwww.sto.nato.int%2Fpublications%2FSTO%2520Meeting%2520Proceedings%2FSTO-MP-MSG-171%2FMP-MSG-171-P1.pdf&usg=AOvVaw2Kw4F5wGOlzt25Zs6bAkgJ (accessed on 19 April 2023).
- Digital Twin-Testing Real World Problems. Available online: https://www.baesystems.com/en/feature/digital-twin-testing-real-world-performance-in-the-digital-world (accessed on 4 November 2022).
- Yang, J.; Xi, M.; Wen, J.; Li, Y.; Song, H.H. A Digital Twins Enabled Underwater Intelligent Internet Vehicle Path Planning System via Reinforcement Learning and Edge Computing. Digit. Commun. Netw. 2022, in press. [Google Scholar] [CrossRef]
- Papanikolaou, A. Holistic Ship Design Optimization. CAD Comput. Aided Des. 2010, 42, 1028–1044. [Google Scholar] [CrossRef]
- Zhou, S.; Wu, W.; Zhang, T.; Zhang, Q. Digital Twin Technical System for Marine Power Systems. Chin. J. Sh. Res. 2021, 16, 151–156. [Google Scholar] [CrossRef]
- Zhou, H.; Liu, X. The Modeling and Using Strategy for the Digital Twin in Process Planning. IEEE Access 2020, 8, 41229–41245. [Google Scholar] [CrossRef]
- Fonseca, Í.A.; Gaspar, H.M. Challenges When Creating a Cohesive Digital Twin Ship: A Data Modelling Perspective. Sh. Technol. Res. 2021, 68, 70–83. [Google Scholar] [CrossRef]
- Erikstad, S.O. Design Patterns for Digital Twin Solutions in Marine Systems Design and Operations Holistic Risk-Based Design for Sustainable Arctic Sea Transport (RISKAT) View Project Design Patterns for Digital Twin Solutions in Marine Systems Design and Operations. In Proceedings of the COMPIT 2018, Pavone, Italy, 14–16 May 2018; p. 10. [Google Scholar]
- Gamma, E.; Helm, R.; Johnson, R.; Vlissides, J. Design Patters: Elements of Reusable Object-Oriented Software; Addison-Wesley: Boston, MA, USA, 1995; ISBN 5272003551. [Google Scholar]
- Negri, E.; Fumagalli, L.; Macchi, M. A Review of the Roles of Digital Twin in CPS-Based Production Systems. Procedia Manuf. 2017, 11, 939–948. [Google Scholar] [CrossRef]
- Institute for Security & Development Policy. Made In China 2025: Backgrounder Report; 2018; pp. 1–9. Available online: https://isdp.eu/publication/made-in-china-2025-backgrounder-report (accessed on 5 January 2023).
- Bécue, A.; Maia, E.; Feeken, L.; Borchers, P.; Praça, I. A New Concept of Digital Twin Supporting Optimization and Resilience of Factories of the Future. Appl. Sci. 2020, 10, 4482. [Google Scholar] [CrossRef]
- Heikkilä, M.; Saarni, J.; Saurama, A. Innovation in Smart Ports: Future Directions of Digitalization in Container Ports. J. Mar. Sci. Eng. 2022, 10, 1925. [Google Scholar] [CrossRef]
- Douaioui, K.; Fri, M.; Mabrouki, C.; Semma, E.A. Smart Port: Design and Perspectives. In Proceedings of the 2018 4th International Conference on Logistics Operations Management (GOL), Le Havre, France, 10–12 April 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Shipfinex How Blockchain Technology Is Revolutionizing Port Operations. Available online: https://www.shipfinex.com/blockchain-technology-in-port-operations (accessed on 19 April 2023).
- Smart Mobility and Services (SMO) | TRIMIS. Available online: https://trimis.ec.europa.eu/roadmaps/smart-mobility-and-services-smo (accessed on 19 April 2023).
- “Maritime 2050-Navigating the Future”. Department for Transport, UK Government. 2019. Available online: https://www.gov.uk/government/publications/maritime-2050-navigating-the-future (accessed on 5 January 2023).
- Smart Ports. Available online: https://www.porttechnology.org/editions/smart_ports (accessed on 3 January 2020).
- Chandra, D.R.; van Hillegersberg, J. Governance of Inter-Organizational Systems: A Longitudinal Case Study of Rotterdam’s Port Community System. Int. J. Inf. Syst. Proj. Manag. 2018, 6, 47–68. [Google Scholar] [CrossRef]
- Smart Port | Port of Antwerp-Bruges. Available online: https://www.portofantwerpbruges.com/en/our-port/port-future/smart-port (accessed on 19 April 2023).
- Ports Australia. Port Digital Twins Working Group Report. 2022. Available online: https://www.portsaustralia.com.au/wp-content/uploads/2022/03/Ports-Australia-Port-Digital-Twins-Working-Group-Report.pdf (accessed on 5 January 2023).
- Bachale, J. Hamburg Joint Project TwinSim. Available online: https://www.bwl.uni-hamburg.de/en/iwi/ueber-das-institut/news/2021/ihatecprojekt.html (accessed on 5 January 2023).
- Yau, K.L.A.; Peng, S.; Qadir, J.; Low, Y.C.; Ling, M.H. Towards Smart Port Infrastructures: Enhancing Port Activities Using Information and Communications Technology. IEEE Access 2020, 8, 83387–83404. [Google Scholar] [CrossRef]
- Heilig, L.; Lalla-Ruiz, E.; Voß, S. Digital Transformation in Maritime Ports: Analysis and a Game Theoretic Framework. NETNOMICS Econ. Res. Electron. Netw. 2017, 18, 227–254. [Google Scholar] [CrossRef]
- Haringer, M.; Regenbrecht, H.T. A Pragmatic Approach to Augmented Reality Authoring. Proc.-Int. Symp. Mix. Augment. Real. ISMAR 2002, 2002, 237–246. [Google Scholar] [CrossRef]
- Marcus, A.; Abromowitz, S.; Abulkhair, M.F. (Eds.) Design, User Experience, and Usability. In Proceedings of the 5th International Conference, DUXU 2016 Held as Part of HCI International 2016, Toronto, ON, Canada, 17–22 July 2016; Springer: Berlin/Heidelberg, Germany, 2016; Volume III, pp. 414–424. [Google Scholar]
- Digital Twins and Digital Twin Technology in an Industrial Context. Available online: https://www.i-scoop.eu/internet-of-things-iot/industrial-internet-things-iiot-saving-costs-innovation/digital-twins/ (accessed on 30 December 2022).
- Shen, H.; Zhang, J.; Yang, B.; Jia, B. Development of an Educational Virtual Reality Training System for Marine Engineers. Comput. Appl. Eng. Educ. 2019, 27, 580–602. [Google Scholar] [CrossRef]
- Fan, C.; Zhang, C.; Yahja, A.; Mostafavi, A. Disaster City Digital Twin: A Vision for Integrating Artificial and Human Intelligence for Disaster Management. Int. J. Inf. Manag. 2021, 56, 102049. [Google Scholar] [CrossRef]
- Shrestha, A.; Mahmood, A. Review of Deep Learning Algorithms and Architectures. IEEE Access 2019, 7, 53040–53065. [Google Scholar] [CrossRef]
- Yiu, C.Y.; Ng, K.K.H.; Lee, C.H.; Chow, C.T.; Chan, T.C.; Li, K.C.; Wong, K.Y. A Digital Twin-Based Platform towards Intelligent Automation with Virtual Counterparts of Flight and Air Traffic Control Operations. Appl. Sci. 2021, 11, 10923. [Google Scholar] [CrossRef]
- Singh, K.K.; Frazier, A.E. A Meta-Analysis and Review of Unmanned Aircraft System (UAS) Imagery for Terrestrial Applications. Int. J. Remote Sens. 2018, 39, 5078–5098. [Google Scholar] [CrossRef]
- Dikmen, M.; Burns, C. Trust in Autonomous Vehicles. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 1093–1098. [Google Scholar] [CrossRef]
- Yang, W.; Zheng, Y.; Li, S. Application Status and Prospect of Digital Twin for On-Orbit Spacecraft. IEEE Access 2021, 9, 106489–106500. [Google Scholar] [CrossRef]
- Yun, H.; Park, D. Simulation of Self-Driving System by Implementing Digital Twin with GTA5. In Proceedings of the IEEE International Conference on Electronics, Information and Communications, Jeju, Republic of Korea, 31 January 2021–3 February 2021; pp. 5–6. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, F.; Qin, T. Research on the Construction of Highway Traffic Digital Twin System Based on 3D GIS Technology. In Proceedings of the 7th International Conference on Computer-Aided Design, Manufacturing, Modeling and Simulation (CDMMS 2020), Busan, Republic of Korea, 14–15 November 2020; Volume 1802. [Google Scholar]
- Trusted Publisher-Independent Citation Database—Web of Science Group. Available online: https://clarivate.com/webofsciencegroup/solutions/web-of-science/ (accessed on 18 October 2021).
- van Eck, N.J.; Waltman, L. Software Survey: VOSviewer, a Computer Program for Bibliometric Mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef]
- Chen, C.; Song, M. Visualizing a Field of Research: A Methodology of Systematic Scientometric Reviews. PLoS ONE 2019, 14, e0223994. [Google Scholar] [CrossRef]
- Application of Digital Twin in Industrial Manufacturing—FutureBridge. Available online: https://www.futurebridge.com/industry/perspectives-mobility/application-of-digital-twin-in-industrial-manufacturing/ (accessed on 18 April 2023).
- Lim, K.Y.H.; Zheng, P.; Chen, C.H. A State-of-the-Art Survey of Digital Twin: Techniques, Engineering Product Lifecycle Management and Business Innovation Perspectives. J. Intell. Manuf. 2020, 31, 1313–1337. [Google Scholar] [CrossRef]
- Hodell, D.A.; Lourens, L.; Stow, D.A.V.; Hernández-Molina, J.; Alvarez Zarikian, C.A. The “Shackleton Site” (IODP Site U1385) on the Iberian Margin. Sci. Drill. 2013, 16, 13–19. [Google Scholar] [CrossRef]
- Dorador, J.; Rodríguez-Tovar, F.J.; Hernández-Molina, F.J.; Stow, D.A.V.; Alvarez-Zarikian, C.; Acton, G.; Bahr, A.; Balestra, B.; Ducassou, E.; Flood, R.; et al. Quantitative Estimation of Bioturbation Based on Digital Image Analysis. Mar. Geol. 2014, 349, 55–60. [Google Scholar] [CrossRef]
- Schreier, H.; Orteu, J.-J.; Sutton, M.A. Image Correlation for Shape, Motion and Deformation Measurements, 1st ed.; Springer: New York, NY, USA, 2009; ISBN 9788527729833. [Google Scholar]
- Rodríguez-tovar, F.J.; Dorador, J. Ichnofabric Characterization in Cores: A Method of Digital Image Treatment. Ann. Soc. Geol. Pol. 2015, 85, 465–471. [Google Scholar] [CrossRef]
- Sanchez-Gonzalez, P.L.; Díaz-Gutiérrez, D.; Leo, T.J.; Núñez-Rivas, L.R. Toward Digitalization of Maritime Transport? Sensors 2019, 19, 926. [Google Scholar] [CrossRef] [PubMed]
- Tao, F.; Zhang, H.; Liu, A.; Nee, A.Y.C. Digital Twin in Industry: State-of-the-Art. IEEE Trans. Ind. Inform. 2019, 15, 2405–2415. [Google Scholar] [CrossRef]
- Quintana, V.; Rivest, L.; Pellerin, R.; Venne, F.; Kheddouci, F. Will Model-Based Definition Replace Engineering Drawings throughout the Product Lifecycle? A Global Perspective from Aerospace Industry. Comput. Ind. 2010, 61, 497–508. [Google Scholar] [CrossRef]
- Tao, F.; Qi, Q. Make More Digital Twins. Nat. Mag. 2019, 573, 490–491. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Reflection of the Original Conceptual Idea of DT by Dr M. Grieves in 2002.
Figure 1.
Reflection of the Original Conceptual Idea of DT by Dr M. Grieves in 2002.
Figure 2.
Difference of data topologies among Digital Model, Digital Shadow, and DT.
Figure 2.
Difference of data topologies among Digital Model, Digital Shadow, and DT.
Figure 3.
Pathway of Digital Twin Technology within the Shipping Industry.
Figure 3.
Pathway of Digital Twin Technology within the Shipping Industry.
Figure 4.
Realtime Satellite Data Link of Smart Ships.
Figure 4.
Realtime Satellite Data Link of Smart Ships.
Figure 5.
General Functions of a Surface Ship.
Figure 5.
General Functions of a Surface Ship.
Figure 6.
Direct Stakeholders of a Ship DT System.
Figure 6.
Direct Stakeholders of a Ship DT System.
Figure 7.
Overall Task Distribution of a DT-based Framework.
Figure 7.
Overall Task Distribution of a DT-based Framework.
Figure 8.
Proposed 4-Layer Ship DT Framework.
Figure 8.
Proposed 4-Layer Ship DT Framework.
Figure 9.
The Flowchart Demonstrating the Adopted Scientometric Analytical Process.
Figure 9.
The Flowchart Demonstrating the Adopted Scientometric Analytical Process.
Figure 10.
Publication Years-DT in Maritime Applications in WoS Analysis.
Figure 10.
Publication Years-DT in Maritime Applications in WoS Analysis.
Figure 11.
Contribution of Countries Towards DT in Maritime Applications in WoS Analysis.
Figure 11.
Contribution of Countries Towards DT in Maritime Applications in WoS Analysis.
Figure 12.
Authors’ Contribution on DT in Maritime Applications.
Figure 12.
Authors’ Contribution on DT in Maritime Applications.
Figure 13.
Authors’ Collaboration on DT in Maritime Applications.
Figure 13.
Authors’ Collaboration on DT in Maritime Applications.
Figure 14.
Visualization of Highest Cited Authors in Respective Clusters with a Threshold of 5.
Figure 14.
Visualization of Highest Cited Authors in Respective Clusters with a Threshold of 5.
Figure 15.
Co-citation Reference Network in the Timespan of 2014 to 2022 with 6 Main Clusters.
Figure 15.
Co-citation Reference Network in the Timespan of 2014 to 2022 with 6 Main Clusters.
Figure 16.
CiteSpace Top-50 Keyword Visualization with Top-10 Timeline Nodes.
Figure 16.
CiteSpace Top-50 Keyword Visualization with Top-10 Timeline Nodes.
Table 1.
Documents Extracted in Search Results of WoS Dataset.
Table 1.
Documents Extracted in Search Results of WoS Dataset.
| Sr No | Document Type | Record Count | Percentage % |
|---|
| 1 | Articles | 650 | 79.075 |
| 2 | Meeting | 234 | 28.467 |
| 3 | Other | 32 | 3.893 |
| 4 | Reviews | 26 | 3.163 |
| 5 | Early Access | 13 | 1.582 |
Table 2.
CiteSpace Analysis Output for Publications with Strongest Citation Bursts.
Table 2.
CiteSpace Analysis Output for Publications with Strongest Citation Bursts.
| References | Year | Strength | Begin | End |
|---|
| Hodell D, 2013, SCI DRILL, v16, P13, DOI 10.5194/sd-16-13-2013 [127] | 2013 | 3.81 | 2014 | 2016 |
| Dorador J, 2014, MAR GEOL, V349, P55, DOI 10.1016/j.margeo.2014.01.003 [128] | 2014 | 3.28 | 2015 | 2018 |
| Sutton M,2009, IMAGE CORRELATION FOR SHAPE, V0, P0 [129] | 2009 | 3.93 | 2009 | 2020 |
| Rodriguez-Tovar F, 2015, ANN SOC GEOL POL, V85, P465 [130] | 2015 | 3.2 | 2015 | 2020 |
| Sanchez-Gonzalez P, 2019, SENSORS-BASEL, V19,P0,DOI 10.3390/s19040926 [131] | 2019 | 3.56 | 2019 | 2022 |
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



















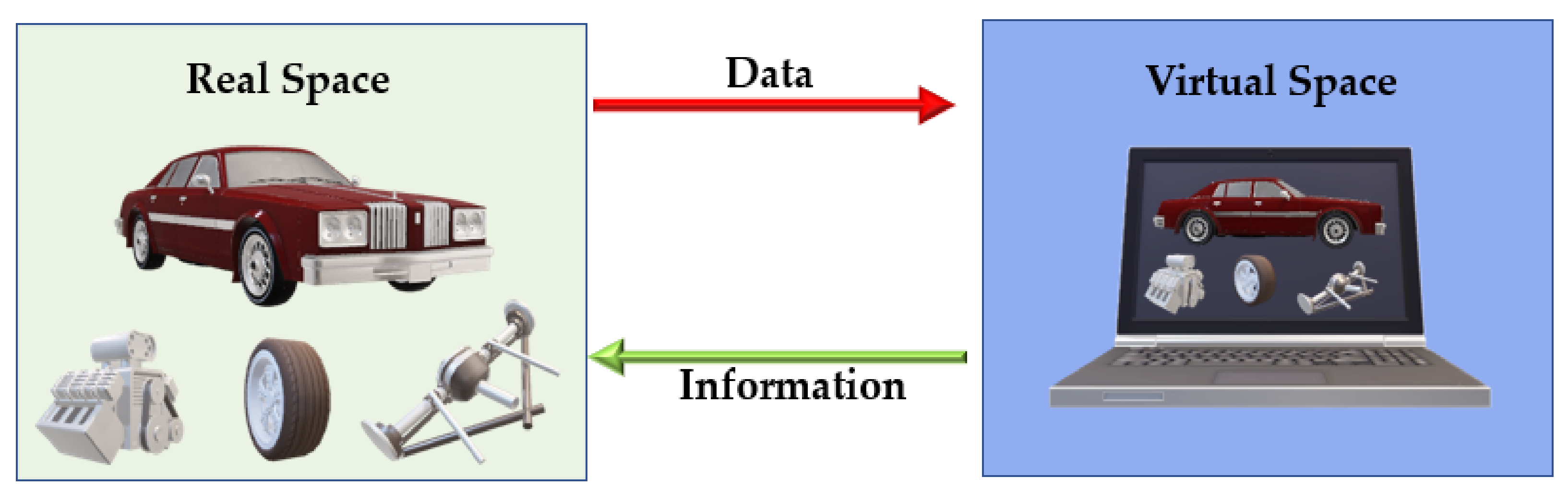{kind=link}
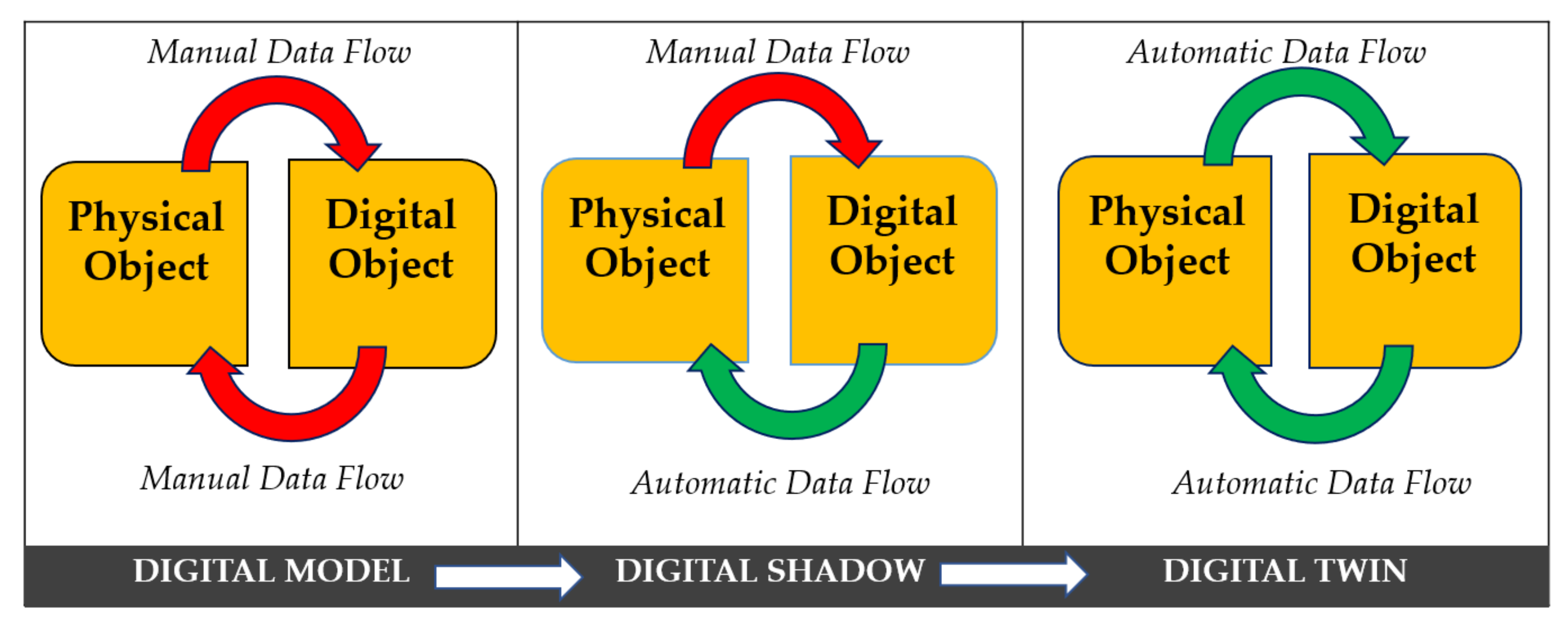{kind=link}
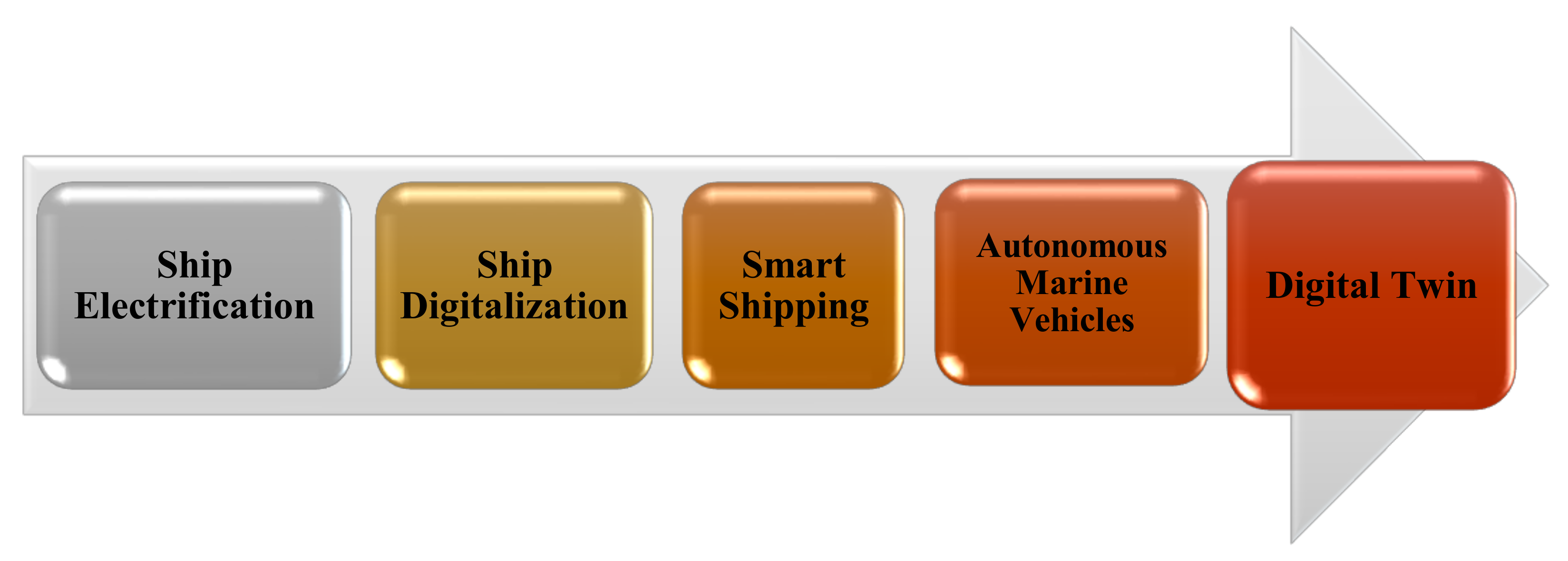{kind=link}
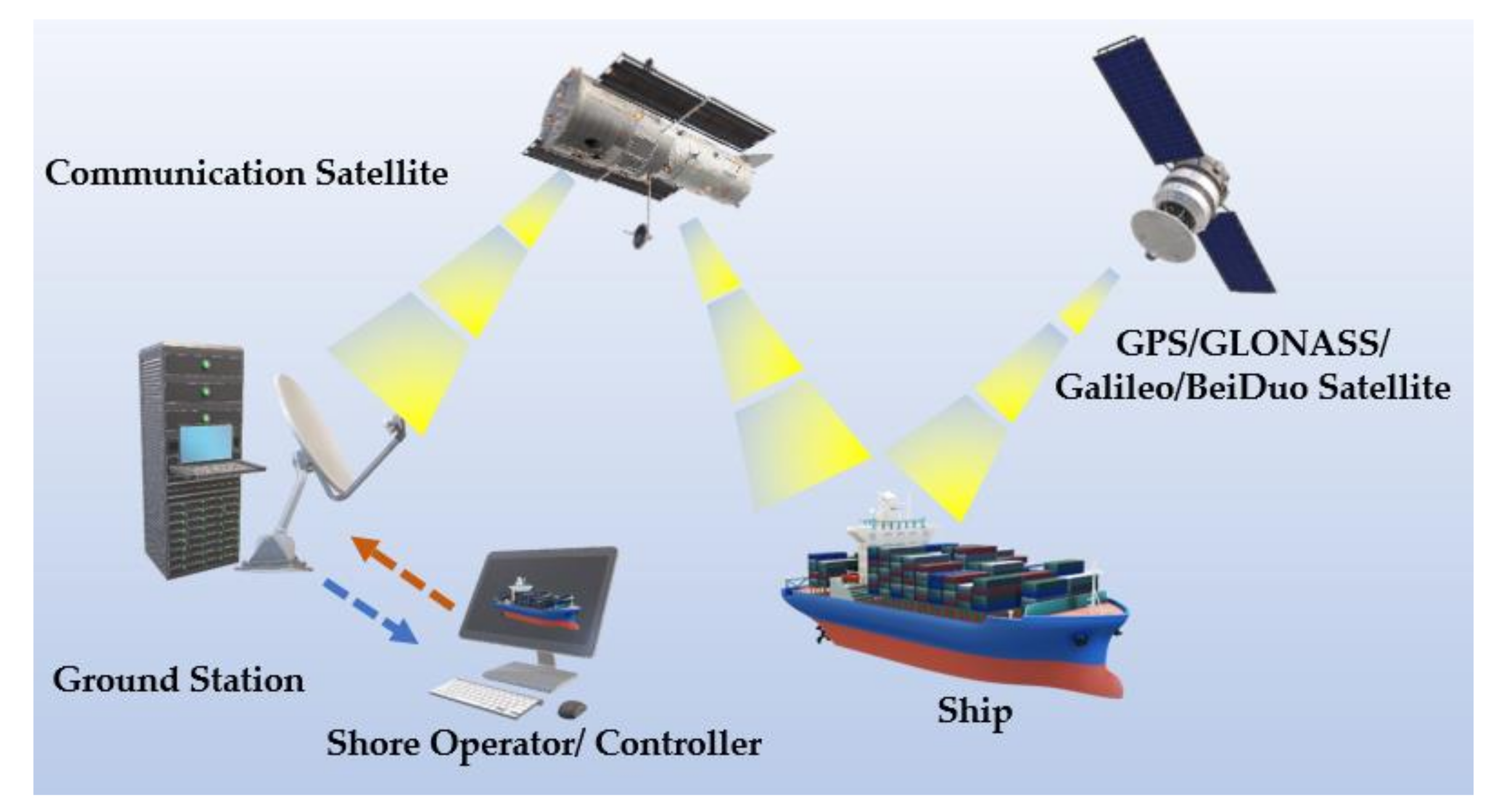{kind=link}
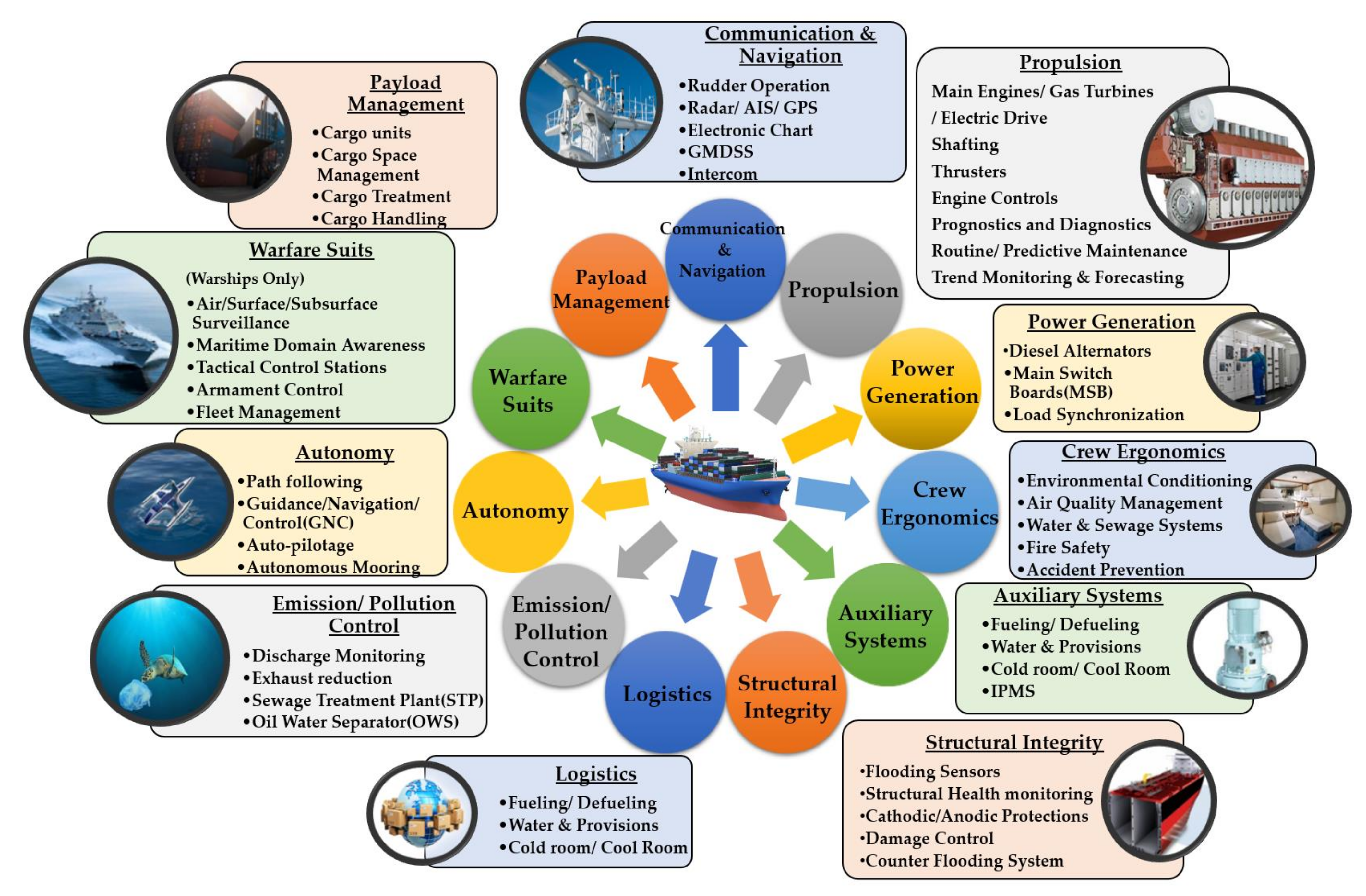{kind=link}
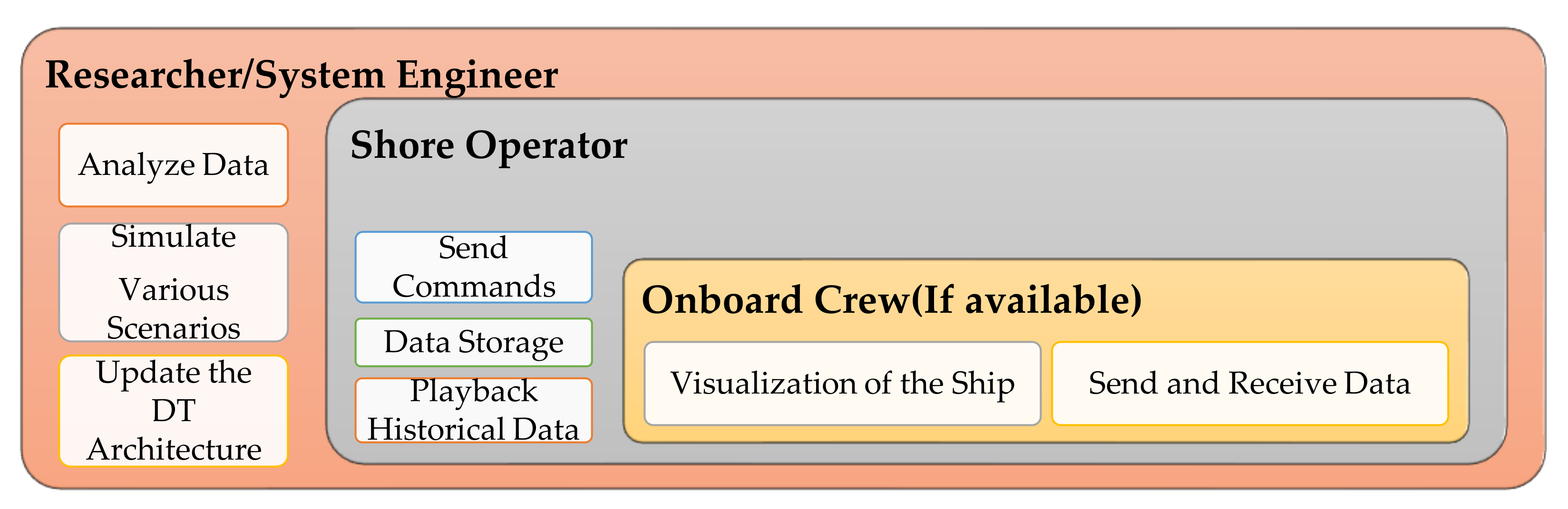{kind=link}
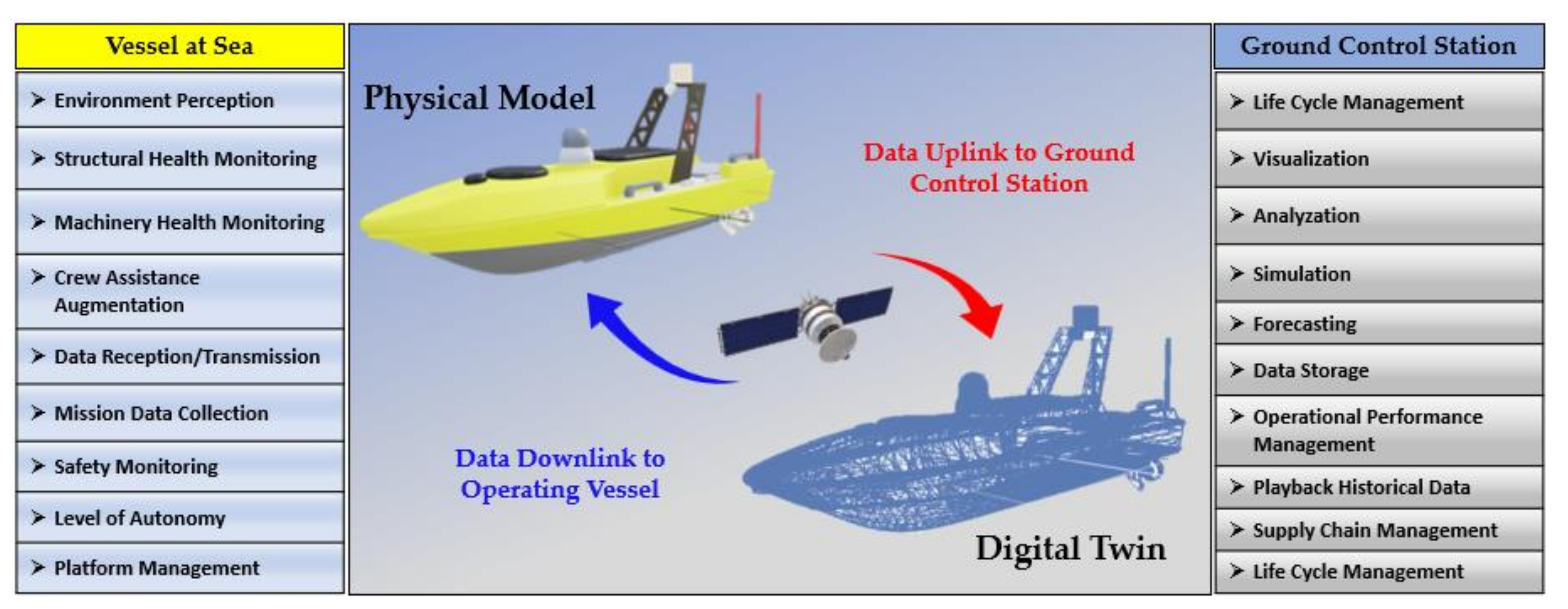{kind=link}
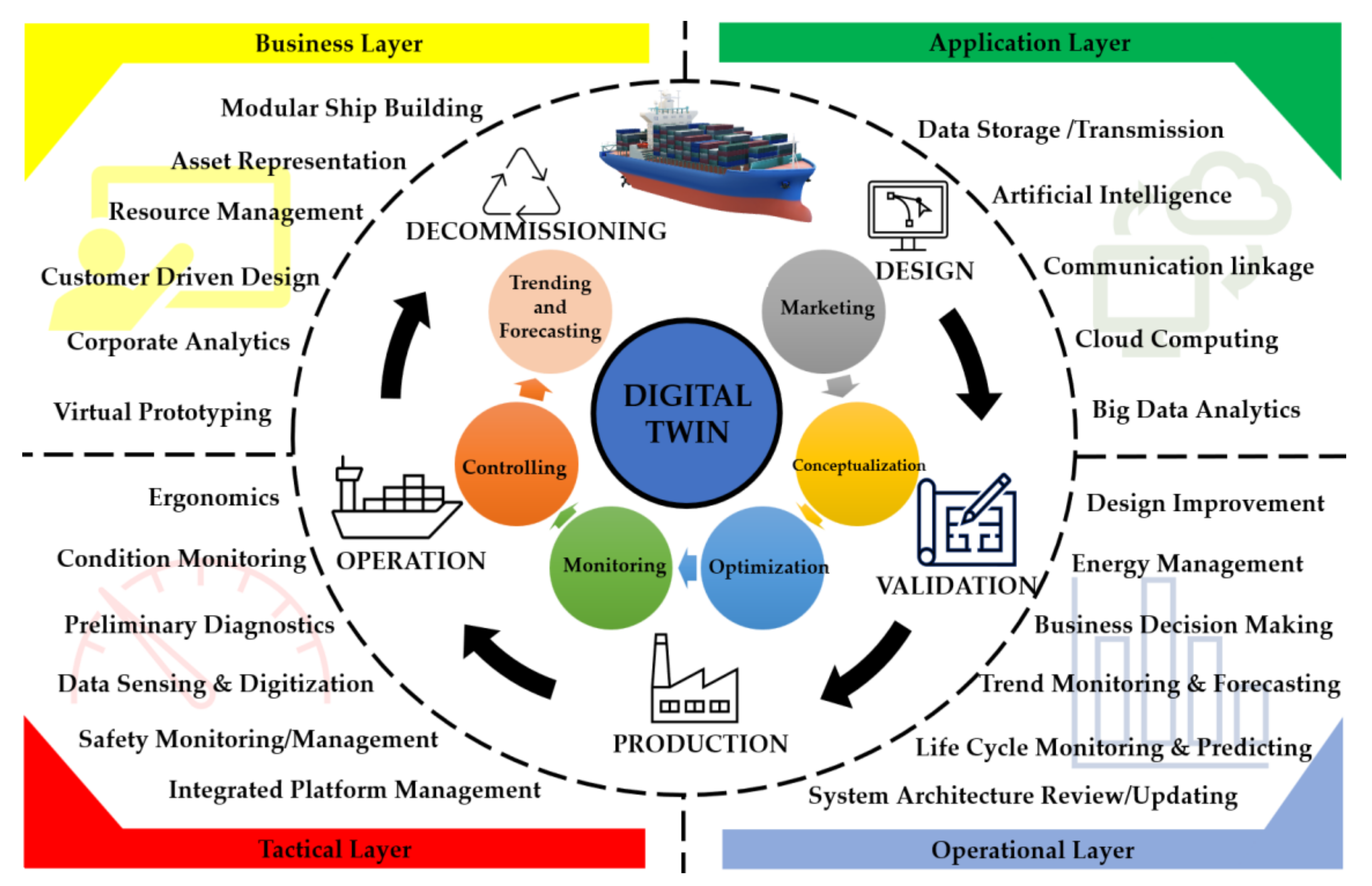{kind=link}
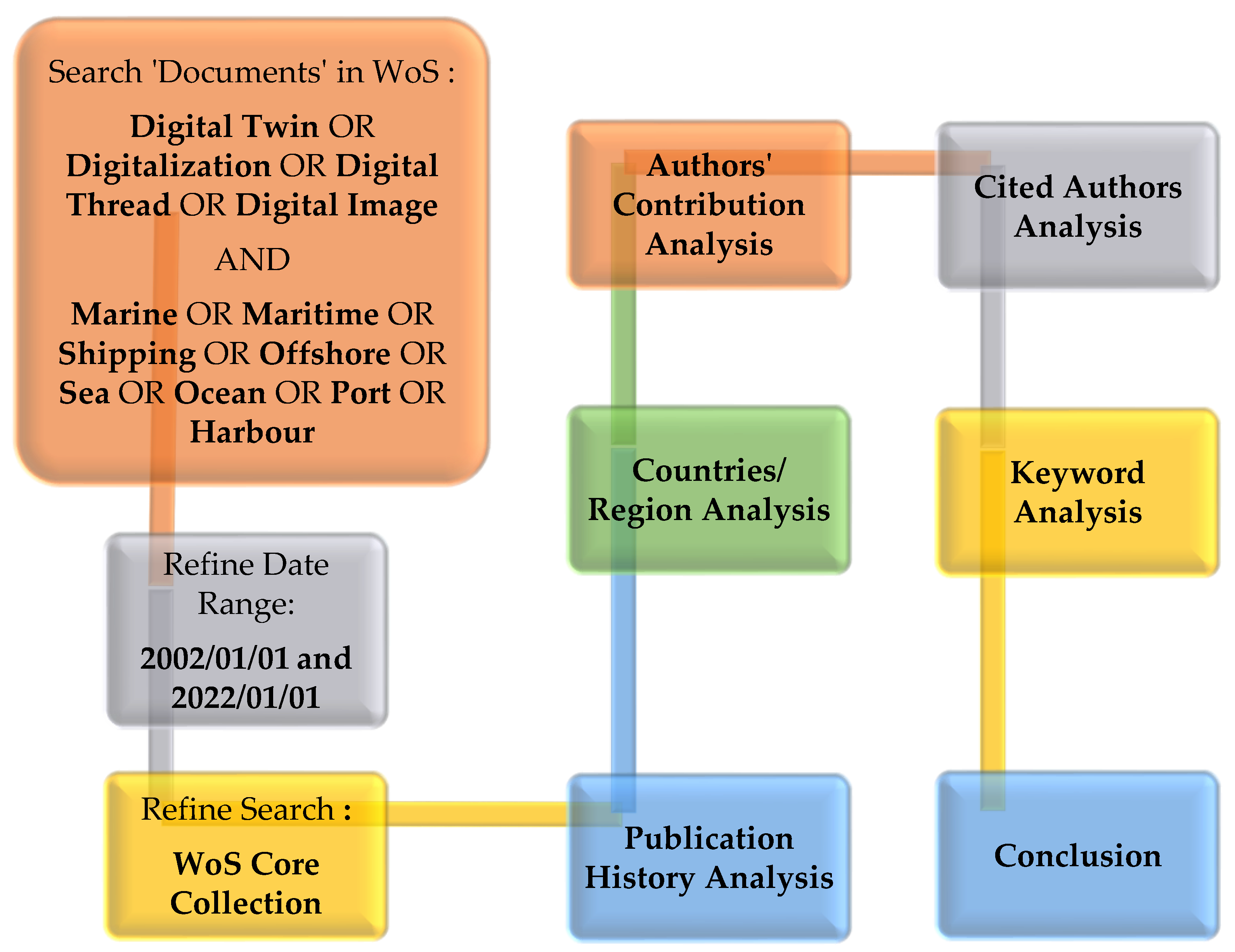{kind=link}
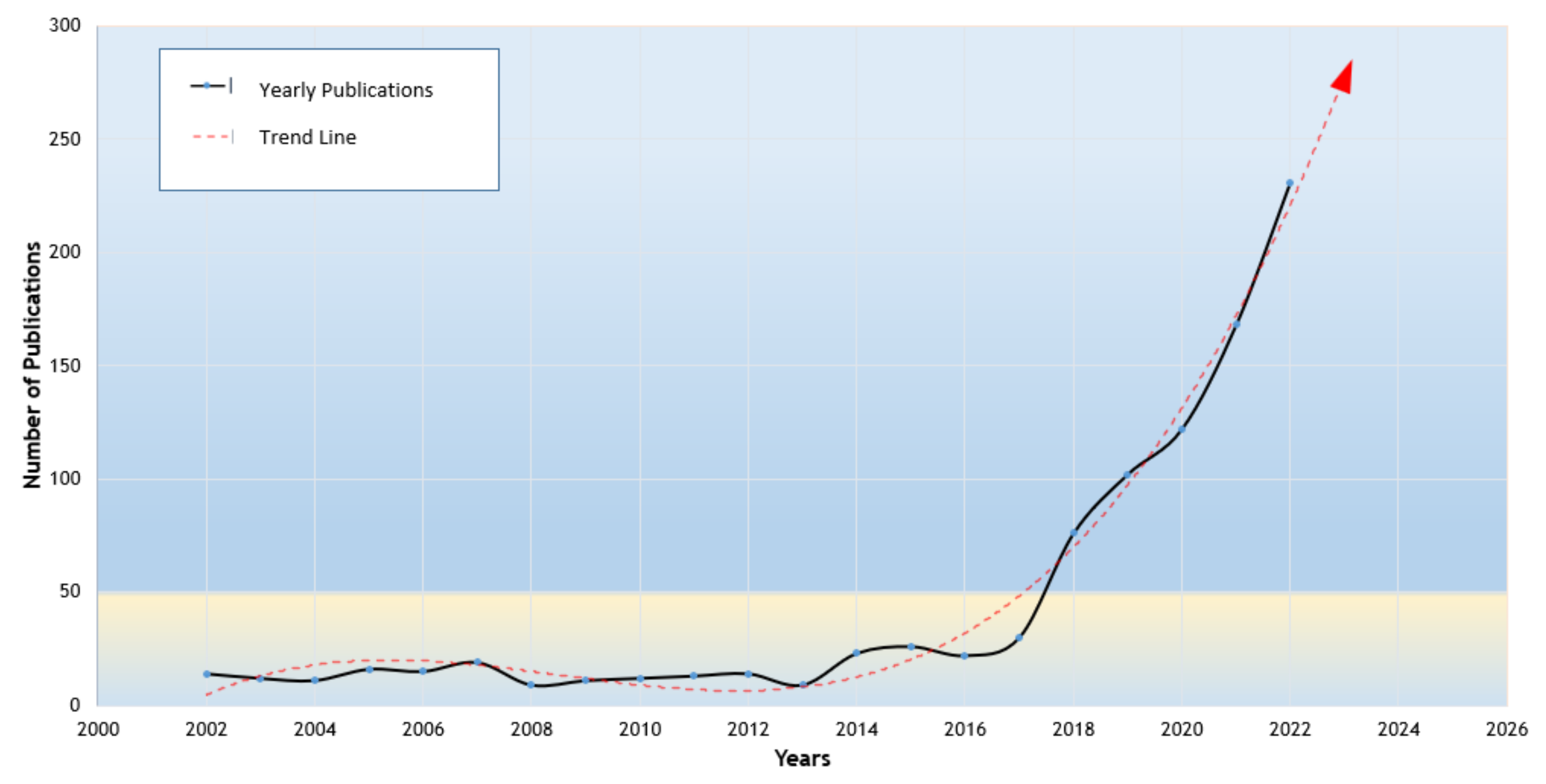{kind=link}
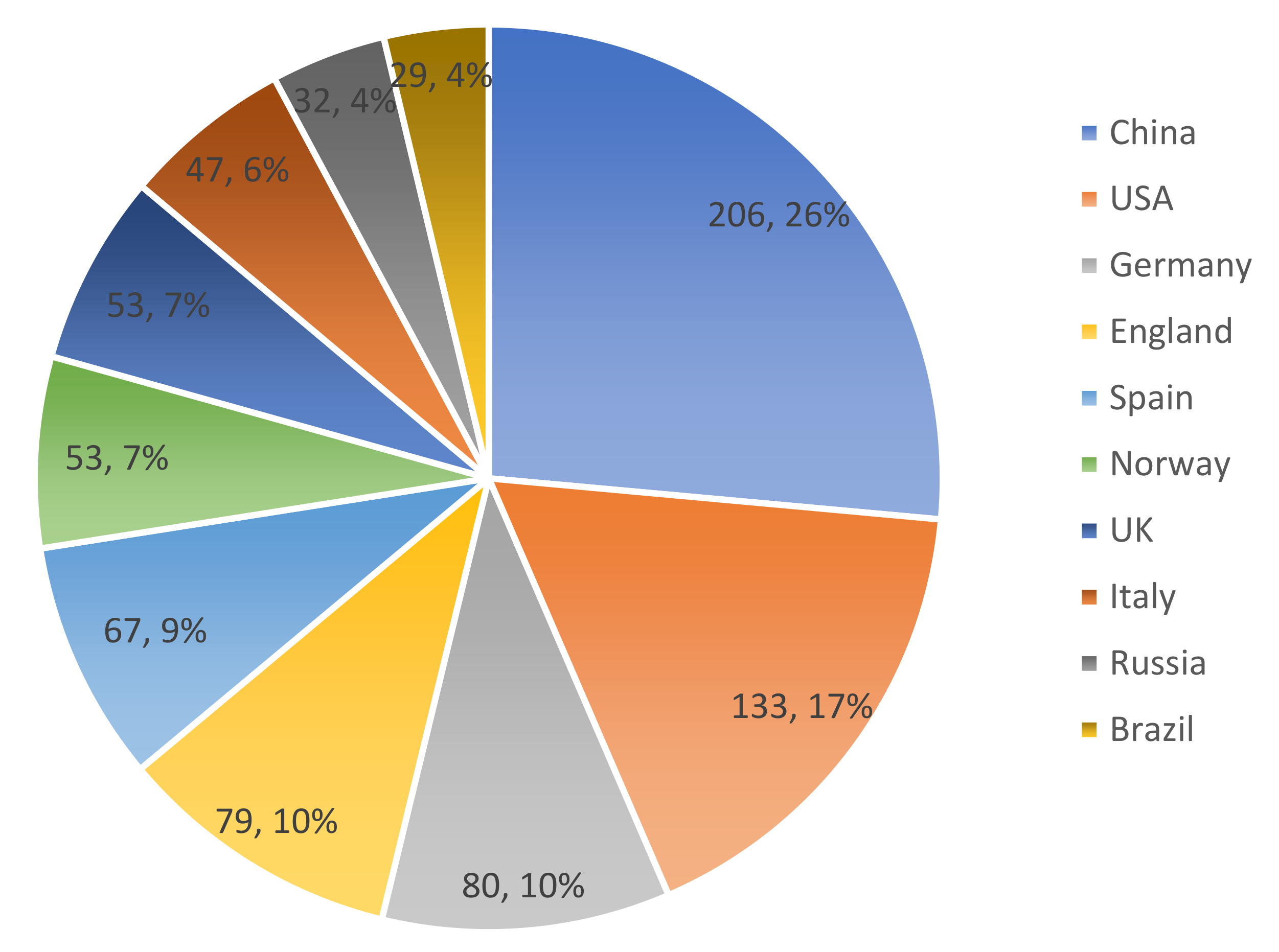{kind=link}
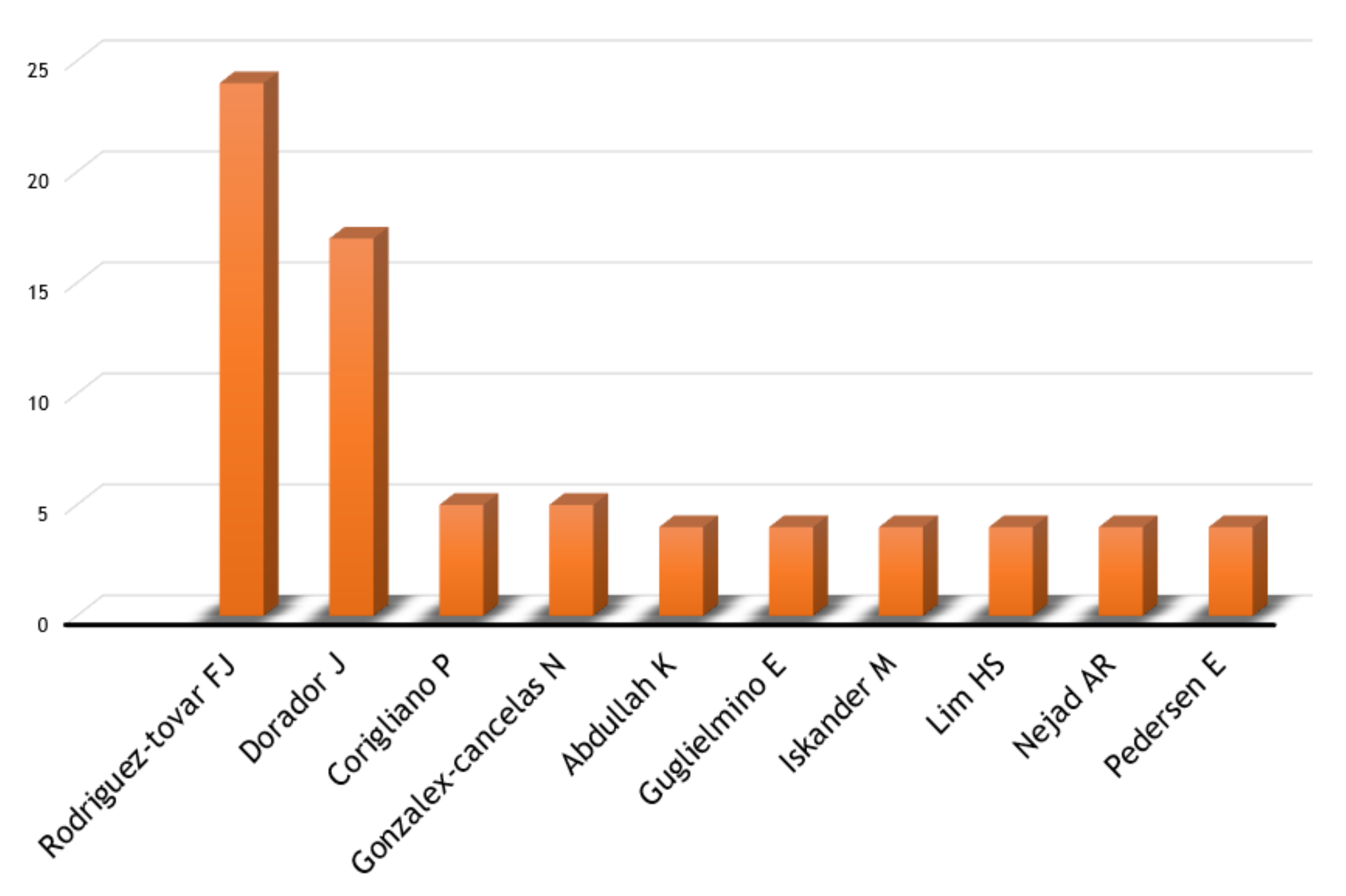{kind=link}
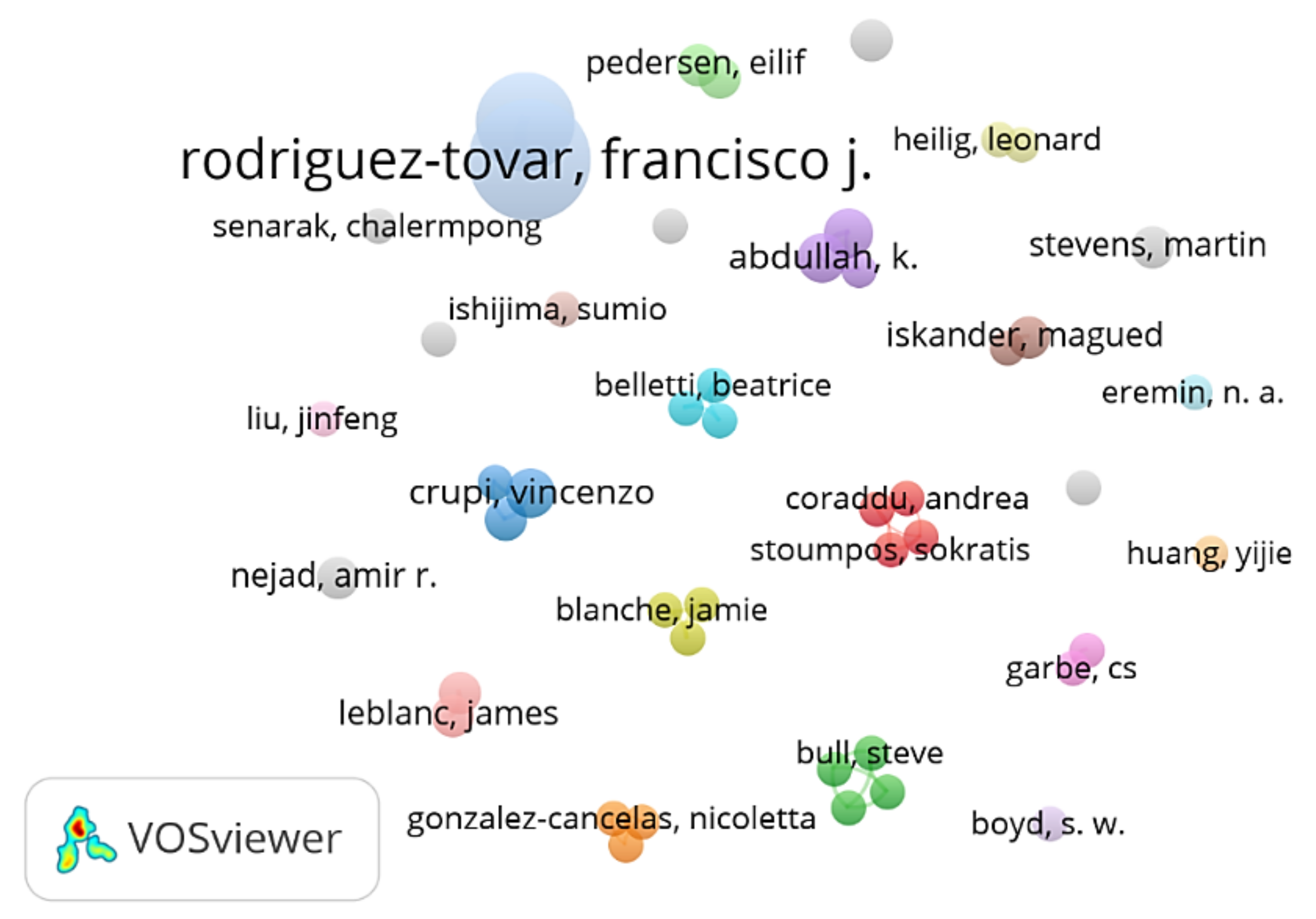{kind=link}
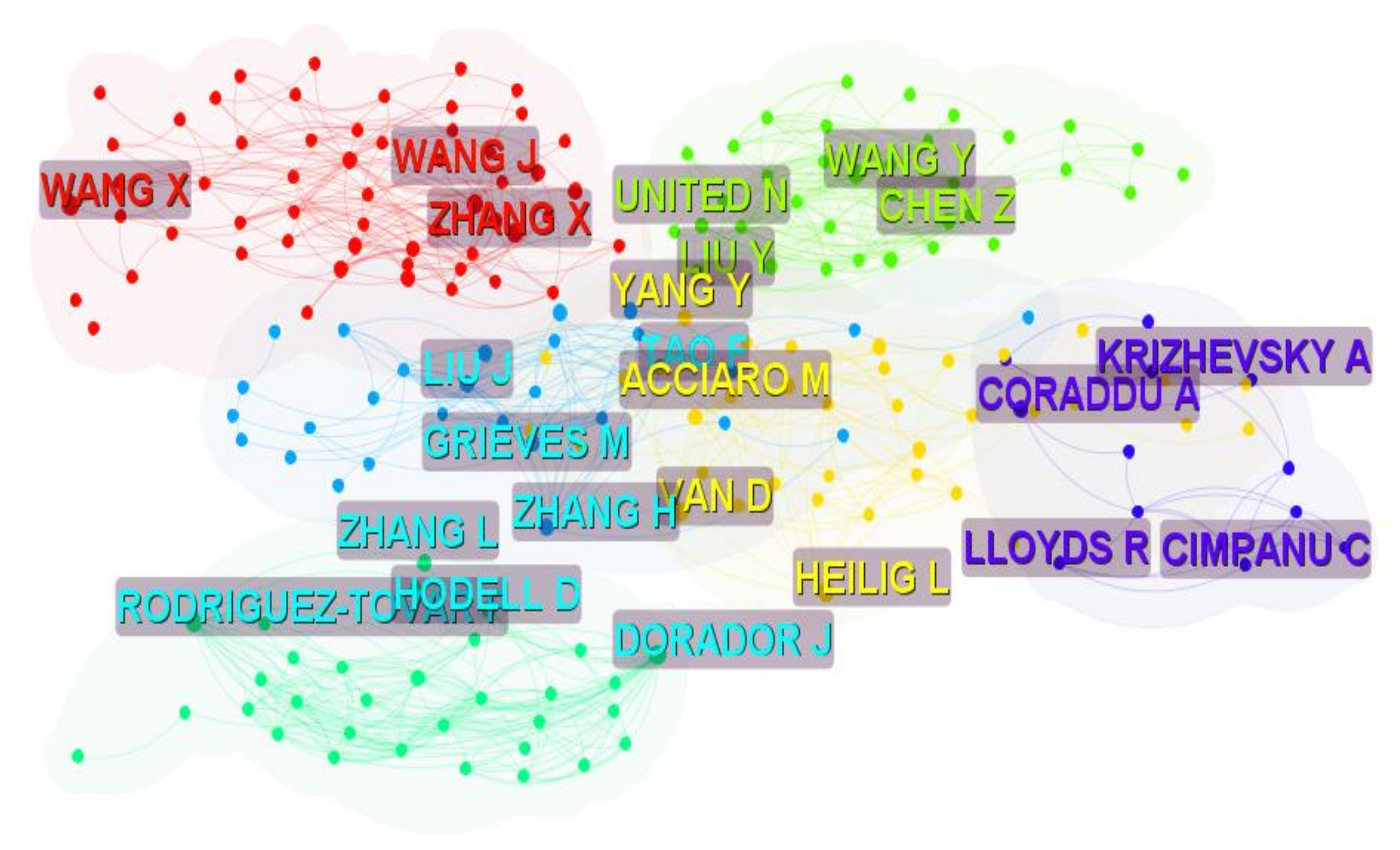{kind=link}
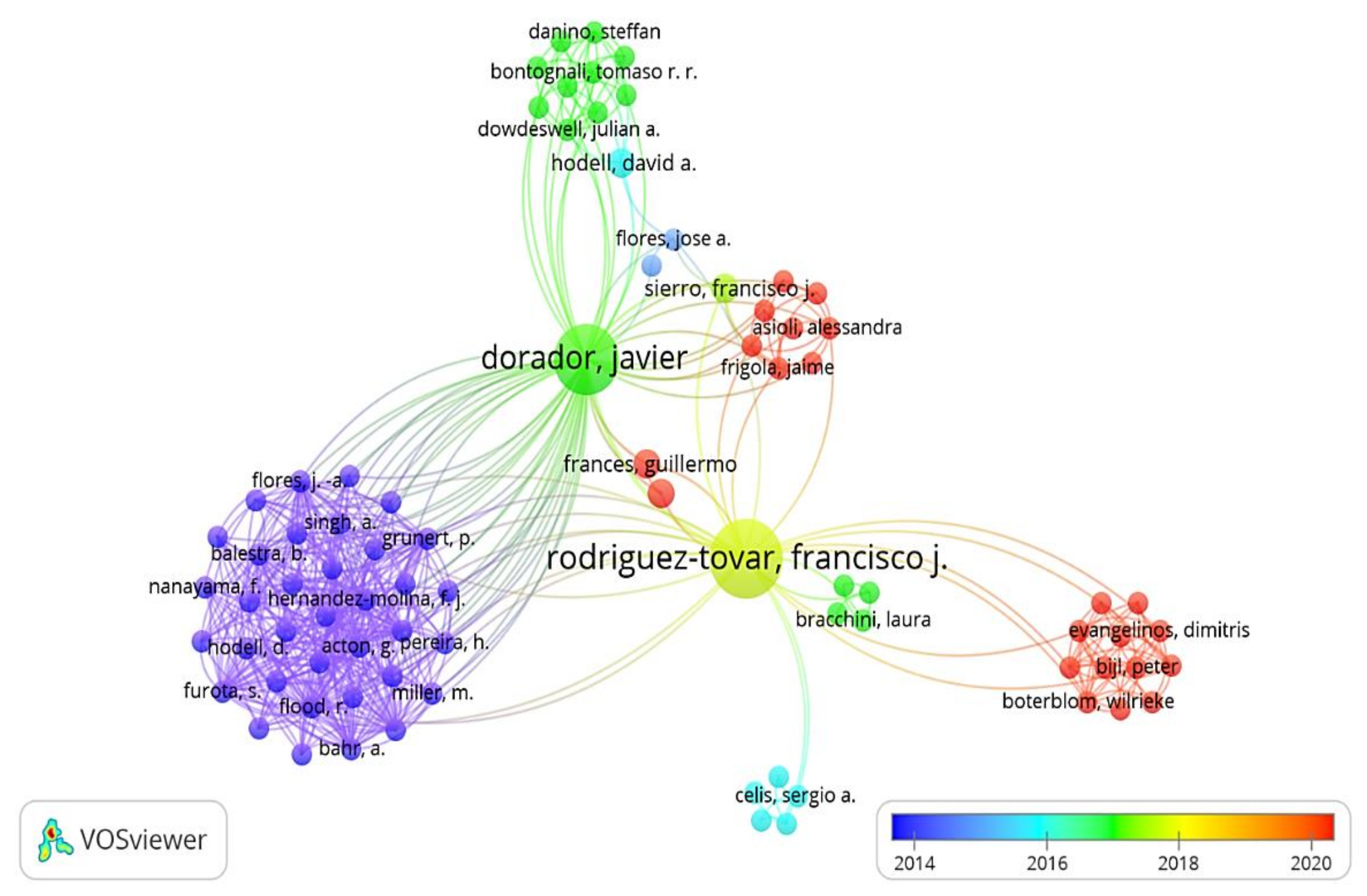{kind=link}
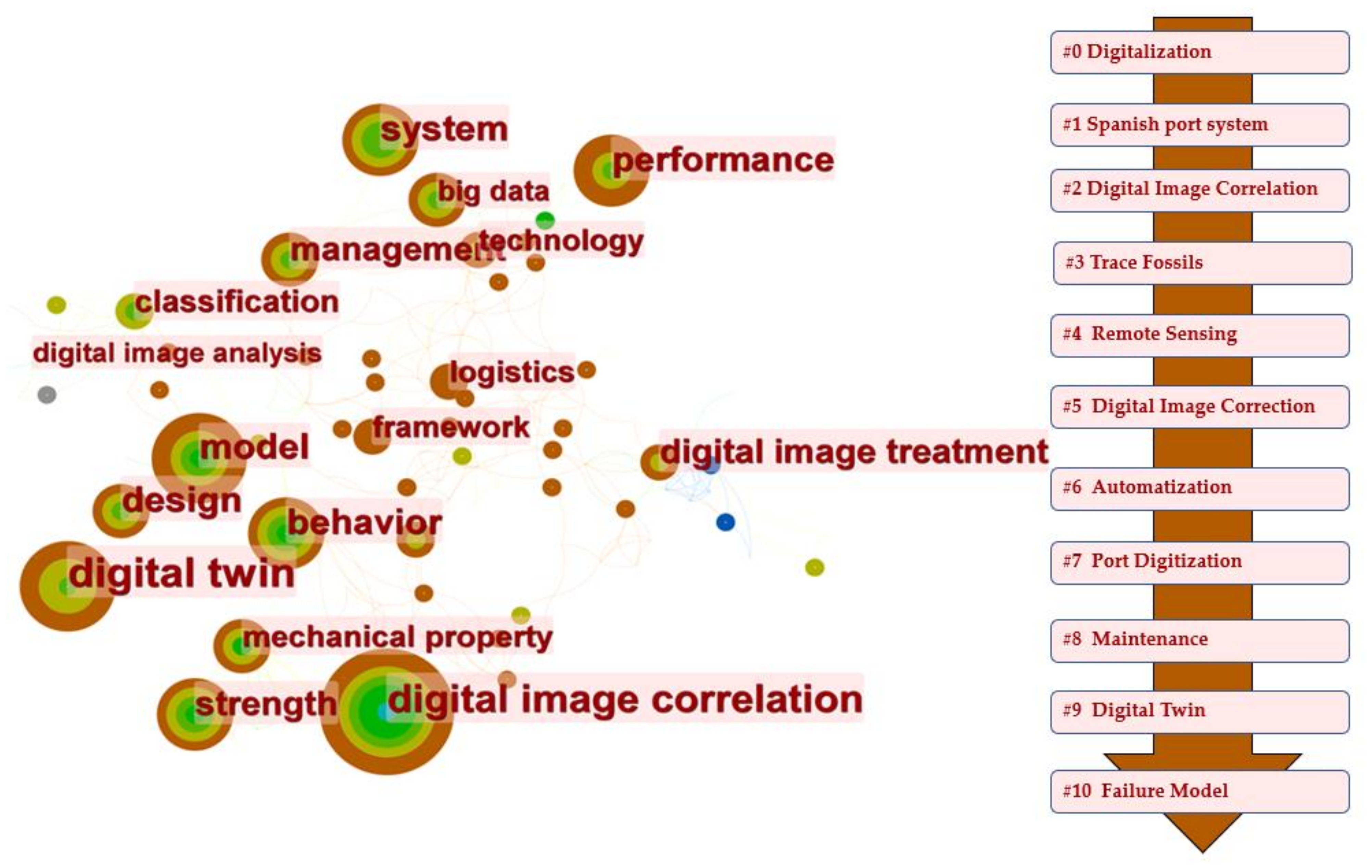{kind=link}