1. Introduction
Offshore engineering has moved from shallow waters to deeper ones, and floating structures have become a major part of offshore engineering communities. Ship and ocean engineering platforms are affected by wave load, so undesirable motions affect many engineering operations [
1], including the equipment handling of oil and gas systems [
2], floating wind turbine installations [
3], and equipment recovery [
4]. Hence, high-quality operability is required in harsh sea conditions. Horizontal motions on the sea surface can be offset by a dynamic positioning (DP) system, which is actuated by a propeller in two directions. Relative heave motion is controlled by a compensation system. A compensation system has been developed from passive compensation to active compensation [
5]. One of the most important applications of the heave compensation system is the crane systems of loading ships. In terms of the safety and efficiency of production loading in harsh sea conditions, the crane system controls the velocity, load and displacement of payload to minimise the operational download time or vibration [
6].
Controlling the vertical motion of the payload is important in keeping the loading operation safe and efficient. The wave-induced motion of a ship leads to critical tension of the rope [
7], which should not be less than zero to avoid slack rope situations, and the rope should not exceed the safety limit to avoid unrecoverable damage. Large undesirable motions between the payload and ship pose a potential danger, and unexpected motions are important causes of loading inefficiency. One of the objectives of heave compensation is to decouple wave/wind-induced motion from payload motion for the payload to move smoothly in an expected manner. Compensation systems are divided into two categories: passive heave compensation (PHC) and active heave compensation (AHC). PHC works as a vibration isolator placed between the payload and ship. It is regarded as a spring–damper system that restores and releases energy to offset the wave-induced heave motion. Hatleskog and Dunnigan (2006) simulated a PHC and showed that a passive compensator can reduce the effects of heave in deep water but only to a limited extent [
8]. It is inefficient for many complex applications that require accurate compensation or involve the relative motions of two bodies. Hence, AHC is proposed to obtain enhanced performance by detecting the heave motion of the ship and transmitting the detected information to the controller; the controller then makes corresponding actions to achieve compensation. Küchler et al. (2010) used a feedforward controller with predicted motion to compensate for heave motion. The proposed controller and the prediction algorithm decouple the motion of the rope-suspended payload from the vessel’s motion. The active compensation system can achieve enhanced compensation effects by collecting ship motion information [
9]: the heave motion of the ship is measured and fed back to a compensation controller [
10]. Woodacre et al. (2015) conducted a comprehensive review of heave compensation, especially in underwater conditions, and established a future development direction of AHC systems.
The control accuracy of floating structures can be improved by eliminating the time delay of the control system. Many researchers have studied the prediction of heave motion. Shi et al. (2014) presented a crane active heave prediction modelling method based on a support vector machine (SVR) for regression, and the parameters of the SVR were optimised by the particle swarm algorithm to improve heave motion prediction accuracy [
11]. Ngo et al. (2017) proposed a fuzzy sliding mode control strategy combined with a prediction algorithm based on Kalman filtering to suppress the sway motion of the payload [
12]. Least squares SVM has also been improved by an artificial immune algorithm to predict the motion trend of offshore platforms [
13]. Through the prediction of heave motion, the short-term motion state can be effectively obtained and used as the input of the control system. To acquire the best control scheme, proportion–integration–differentiation (PID) control [
14] and fuzzy PID control [
15] have been widely used in engineering. Moreover, the back propagation (BP) neural network PID control method [
16] has been adopted to perform simulation analyses because the neural network has self-learning capabilities. An increasing number of machine learning algorithms have been introduced to control strategies for prediction and control parameter optimisation in recent years [
17,
18].
In summary, heave motion prediction plays an important role in the AHC system. Many control strategies have been used in heave compensation systems regardless of whether feedback or feedforward control is involved. PID control is a control loop mechanism that employs feedback, and it is widely used in offshore compensation control systems [
19]. A PID controller continuously calculates the error value as the difference between a desired set point and a measured process variable. Then, it applies correction based on three terms: proportional, integral and differential terms. Thus, PID control has the advantages of simple principle, convenience of utility, good stability and robustness [
20]. As one of the most frequently used and efficient methods, it is implemented to minimise the load motion. The predictive control strategy is a tool for optimising the performance of offshore heave compensation systems, especially when it is coupled with advanced machine learning techniques. With the predicted information of wave-induced motion, the phase lag is expected to be eliminated. The BP neutral network can approximate any nonlinear function, so its structure and learning algorithm are simple and clear [
21]. Long short-term memory recurrent neural network (LSTM RNN) algorithms are the most popular type of RNN, and they can help overcome diminishing or exploding gradients during the training process [
22]. They can be used to adjust and optimise PID controller parameters in accordance with the system state. Therefore, this study proposes an active heave compensation system with PID based on machine learning prediction algorithms (BPNN and LSTM RNN) which use predicted motions to minimise the deviation of the heave compensation system. The accuracies of different machine learning prediction algorithms with regular and irregular wave conditions are compared, and the influence of the predictive motion data and actual-data feedforward cases on compensation performance is analysed. The rest of the paper is organised as follows.
Section 2 briefly addresses the AHC system and the modelling process. A simplified heave compensation model is presented to focus on the design predictive controller. Machine learning prediction algorithms, namely, BPNN and LSTM RNN, are introduced, and a predictive PID control strategy is developed. In
Section 3, predictive feedforward control under regular structure motion is analysed. In
Section 4, predictive feedforward control under irregular structure motion is investigated and compared with regular structure motion. The conclusions are presented in
Section 5.
4. Predictive Feedforward Control under Irregular Structure Motion
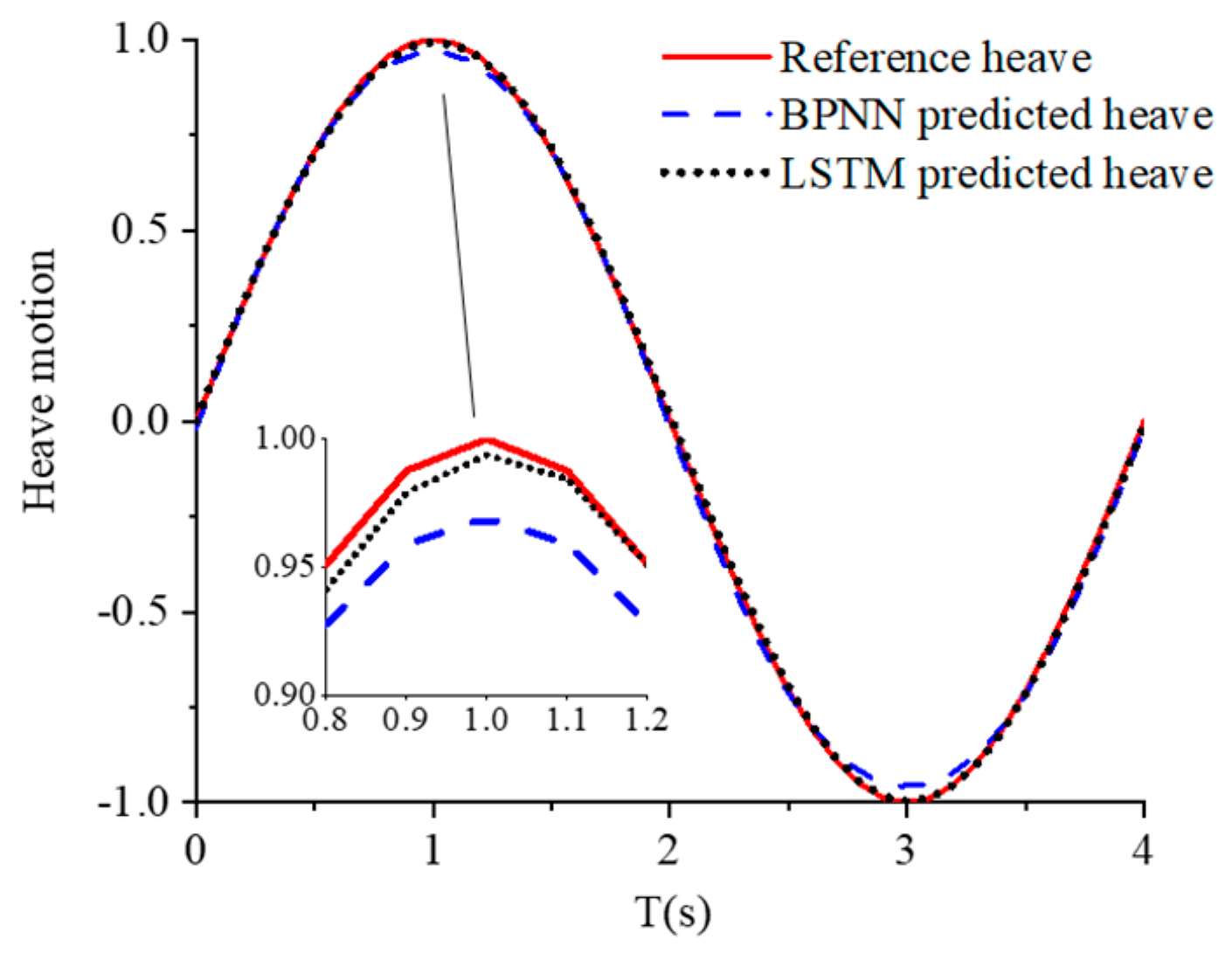
After investigating regular structure motion cases and providing preliminary concluding remarks, the cases of irregular structure motion are examined in this section. The irregular structure motion of an offshore structure is obtained from Kelvin Hydrodynamic Laboratory, University of Strathclyde. The irregular wave power density is distributed as a wave power spectrum. In this paper, the wave power spectrum is a JONSWAP (Joint North Sea Wave Project) spectrum. The irregular waves were composed of more than 50 components. The paper uses experiments to acquire data because there are currently no full-scale ship test conditions available. Firstly, the paper uses the JONSWAP spectrum in model scale to validate the proposed method; the conversion scale ratio between themodel and the full-scale ship is confirmed based on the Froude criterion. Secondly, if put into use to fulfill prediction requirements in real seas, the proposed NN model and system will need to be retrained with full-scale data that involves investigation and recording of real-time motion or wave height. Additionally, if the real seas or the structure model change, the prediction NN model and system will need to be retrained accordingly by means of methods such as incremental training. Thus, the experimental data cannot be used in real seas, whose simulation will be carried out based on the retraining of the prediction NN model with full-scale data. The prediction results of the heave structure motion in irregular waves are shown in
Figure 13.
The sampling frequency of the height meter is 100 Hz. The recorded heave motion is curved in the upper subfigure of
Figure 14. The reference heave motion is normalized as the regular motion case. The discussion in this section is separated into two parts. The first part determines the optimal feedforward step of the PID control system, and the second part compares the performance of the control system when the two machine learning prediction algorithms are used.
The dominant frequency of structure motion in
Figure 14 is approximately 1 Hz. The amplitude of the irregular motion case is 0.028 (
Table 6) and that of the regular case with 1 Hz motion frequency is 0.021 (
Table 4). Comparison of the performance of the actual-data feedforward cases indicates that the amplitude of the irregular motion case is slightly larger than that of the regular case under the dominant frequency. The compensation effect of irregular motion is approximate to that of the dominant frequency. This result indicates that the capacity of the proposed control method in irregular motion state is as good as that in the regular motion condition. The difference between the two cases may be caused by other components with a high vibration frequency. As shown in
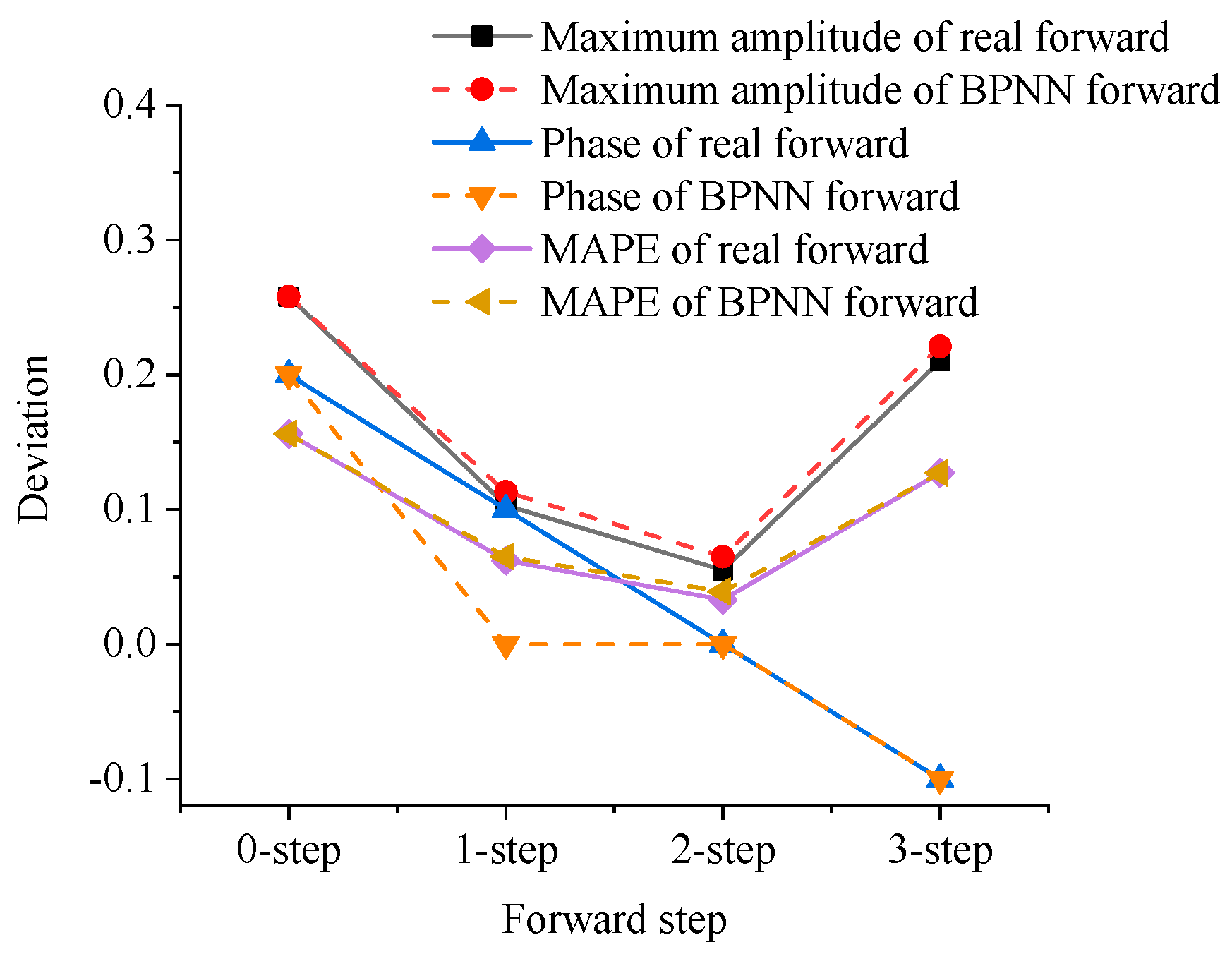
Figure 14, the one-step and two-step feedforward control cases perform well. When the number of prediction steps increases to three, the performance worsens again, but it is still a better choice than the feedback control. Between the one-step and two-step cases, the latter is superior because of its smaller motion amplitude of load heave. Therefore, the optimal step number is two when the prediction process is implemented.
In the case of irregular structure heave motion, the BPNN prediction does not meet the accuracy requirement as well as it does in the regular motion cases. The advanced machine learning algorithm, namely, LSTM RNN, is also implemented to predict the future motion in a feasible manner. Two pairs of curves almost overlap in
Figure 15. The first pair is the one-step BPNN feedforward case and the case without feedforward (feedback). A possible reason for this overlapping phenomenon is the inaccurate prediction of the BPNN algorithm. Irregular motion is a complex time series variation for BPNN. Therefore, a simple BPNN model is expected to unsuccessfully predict the next step motion, but its result is close to the current step motion. Thus, the curves overlap because they have almost the same input. The second pair is the two-step BPNN feedforward case and the one-step LSTM RNN feedforward case. From another indirect aspect, the LSTM RNN prediction motion is proven accurate.
The overlapped cases mentioned above have similar deviation values regardless of the maximum amplitude, MAE or RMSE. The heave motion of the BPNN prediction cases is much larger than that of the actual-data feedforward control cases, so BPNN is not a recommended prediction algorithm for irregular motions. Heave compensation system control based on LSTM RNN prediction can minimise the motion amplitude with different numbers of prediction steps. Two-step LSTM RNN prediction has the best effect on compensating for the payload motion.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}