4.1. Effect on the Whole SWATH
In this section, the cases for SWATH moving at various airflow rates
Q with different air injection locations in a calm water are simulated. In all cases, the SWATH model is fixed in an upright sailing attitude, with a forwarding speed = 8 m/s. The effect of air injection location on the drag reduction in the whole SWATH, the underwater body of SWATH, the strut of SWATH, and different areas of the underwater body are discussed. The information on the cases is shown in
Table 3. In each case, the airflow is injected from one location.
The computed results of the resistance and drag reduction are shown in
Figure 6.
is the total resistance.
is the total resistance reduction rate,
, where,
is the total resistance for the cases without air injection,
is the total resistance for the cases with air injection.
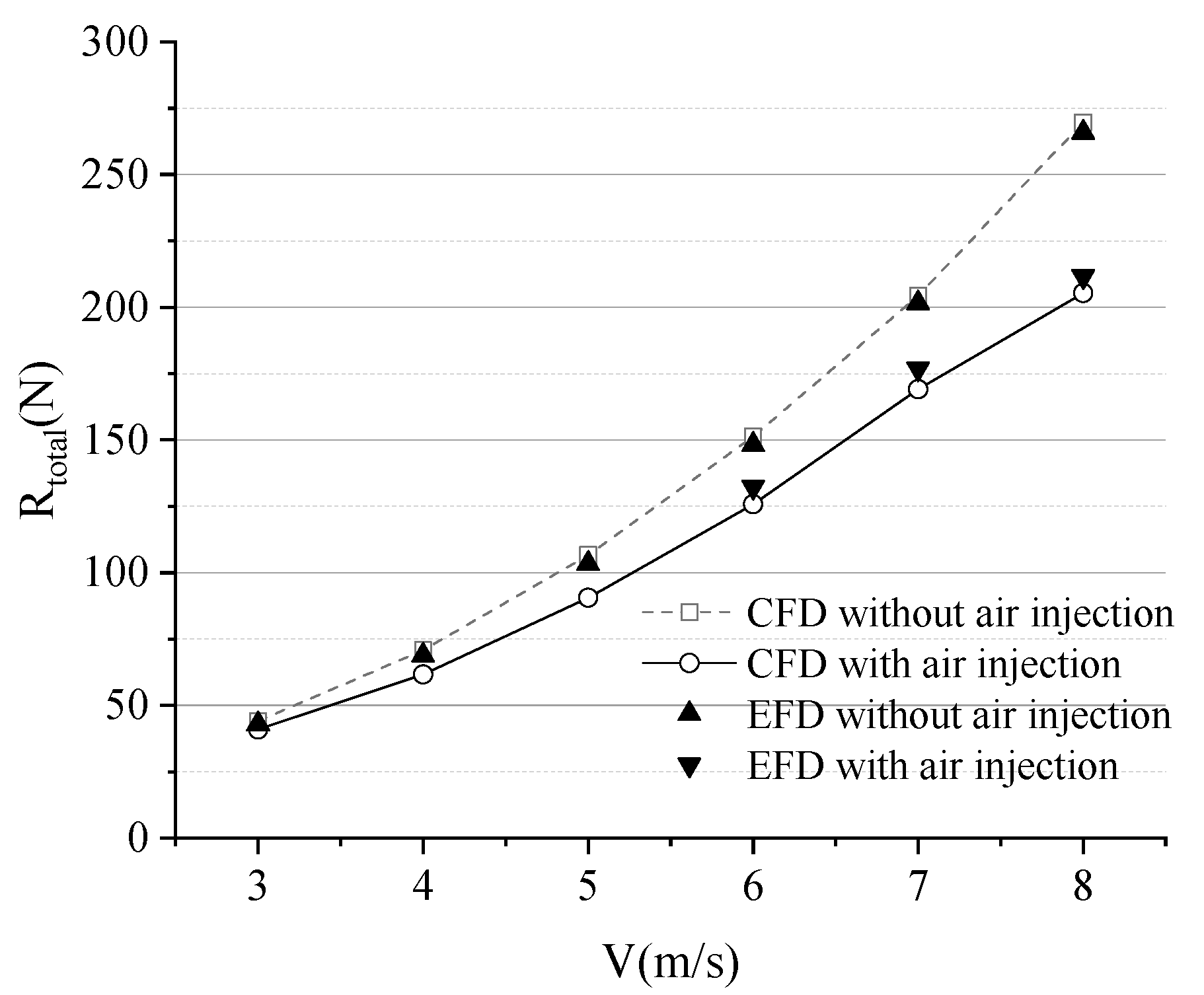
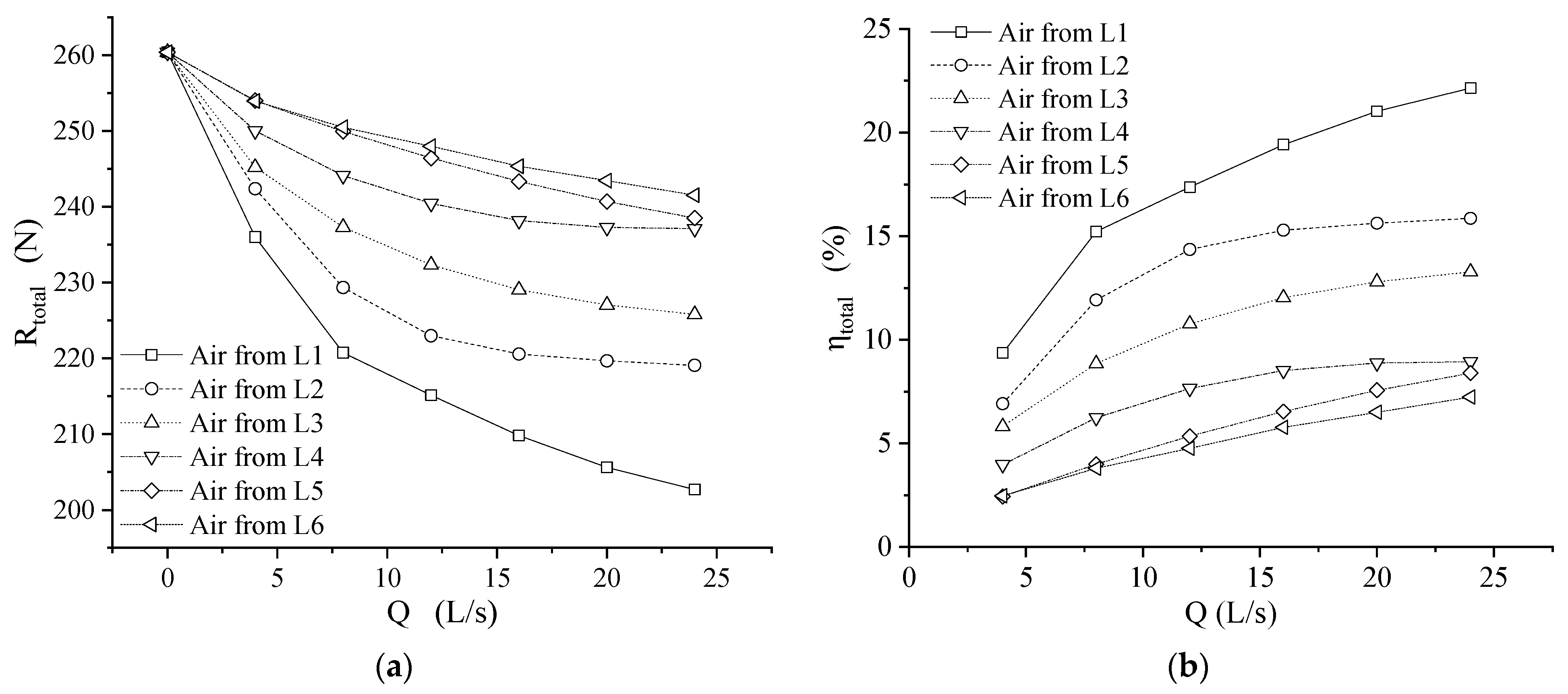
It could be seen that the air injection location has a significant influence on the total resistance, as shown in
Figure 6a. The injection location on the underwater body will result in a smaller total resistance than the injection location on the strut. The air injection from the location closer to the front end of SWATH will lead to the lower total resistance. As the airflow rate increases, the resistance gradually decreases, no matter which location the air is injected. In the cases of the air injected from locations L2, L3, and L4, the total resistance curve tends to be stable, and the airflow reaches a saturation rate of 20 L/s. In the cases of injecting air from location L1, even if the airflow rate reaches 24 L/s, the resistance curve still has a downward trend. It is because the injection location L1 is located at the front end of the underwater body. The air could cover a larger surface area, so the saturated airflow rate is more significant than in other cases. It could be seen that the air injected from location L1 will cause the most significant drag reduction, as shown in
Figure 6b. When the airflow rate is 24 L/s, the drag reduction can reach 22.15%. The air injected from the location closest to the head of SWATH will lead to a more significant drag reduction. The air injection location on the underwater body is more conducive to drag reduction than the air injection location on the strut.
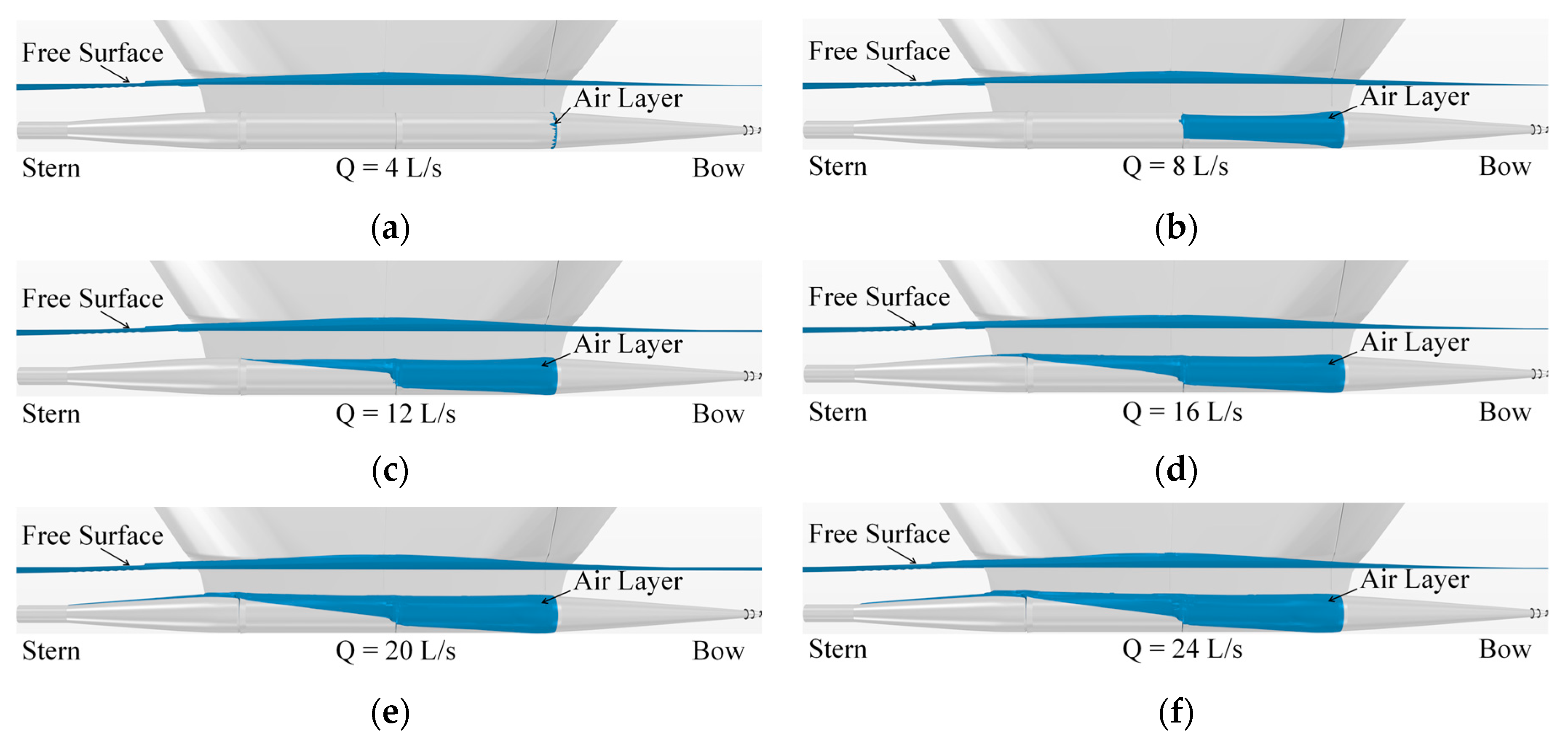
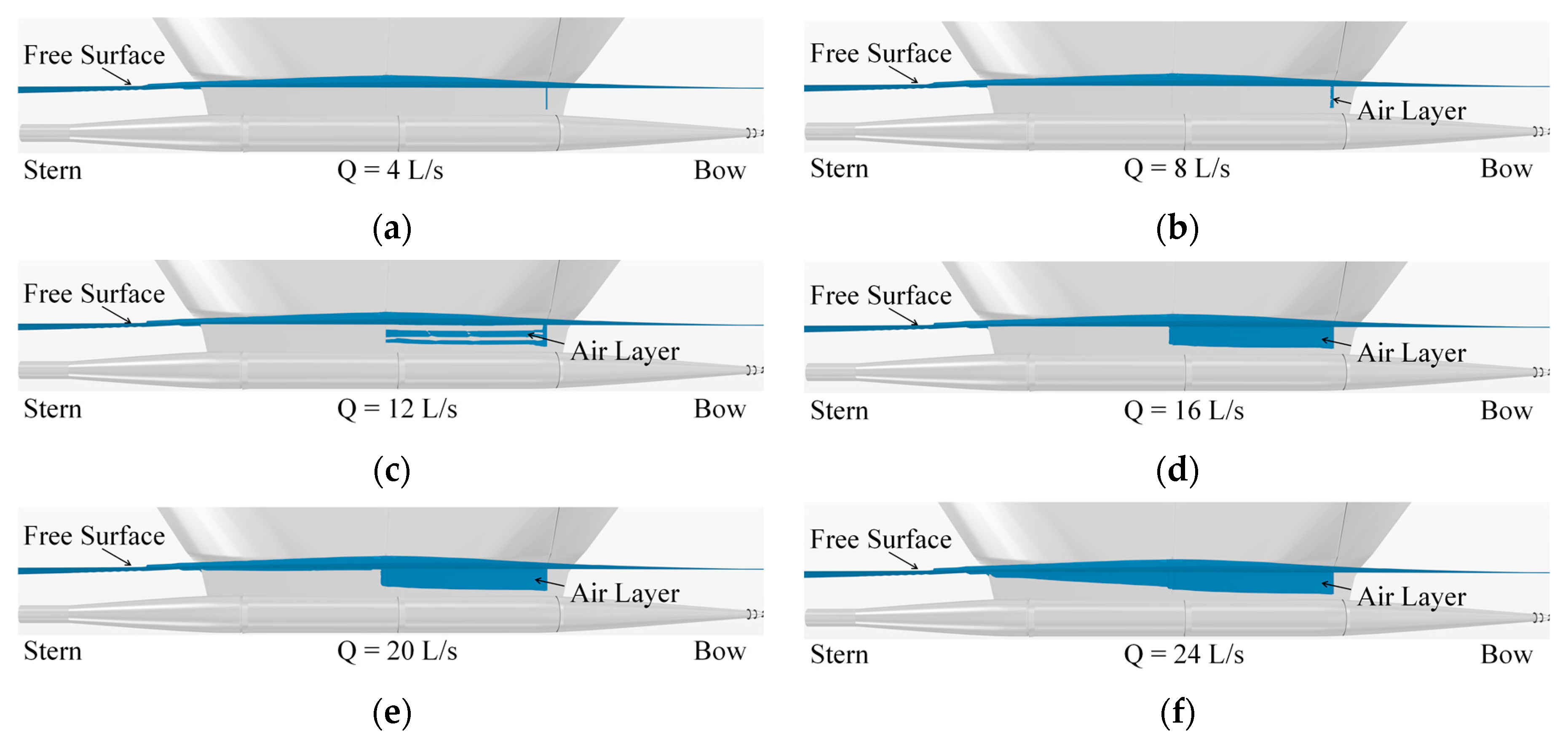
By comparing
Figure 7a–f, the airflow rate significantly affects the air layer distribution. With a slight airflow rate, Q = 4 L/s, the air layer could only cover the area near injection location L1, as shown in
Figure 7a. With the increase in airflow rate, the size of the air layer distribution increases. When the airflow rate is 8 L/s and 12 L/s, the air layer could cover area A1, as shown in
Figure 7b,c. As the airflow rate continues to increase, the air layer spreads to the middle of the underwater body, and due to the influence of buoyancy, the air layer covers the upper part of the underwater body, as shown in
Figure 7d–f. It could be found that, even with a significant airflow rate, increasing the airflow rate could still increase the area of the air layer distribution.
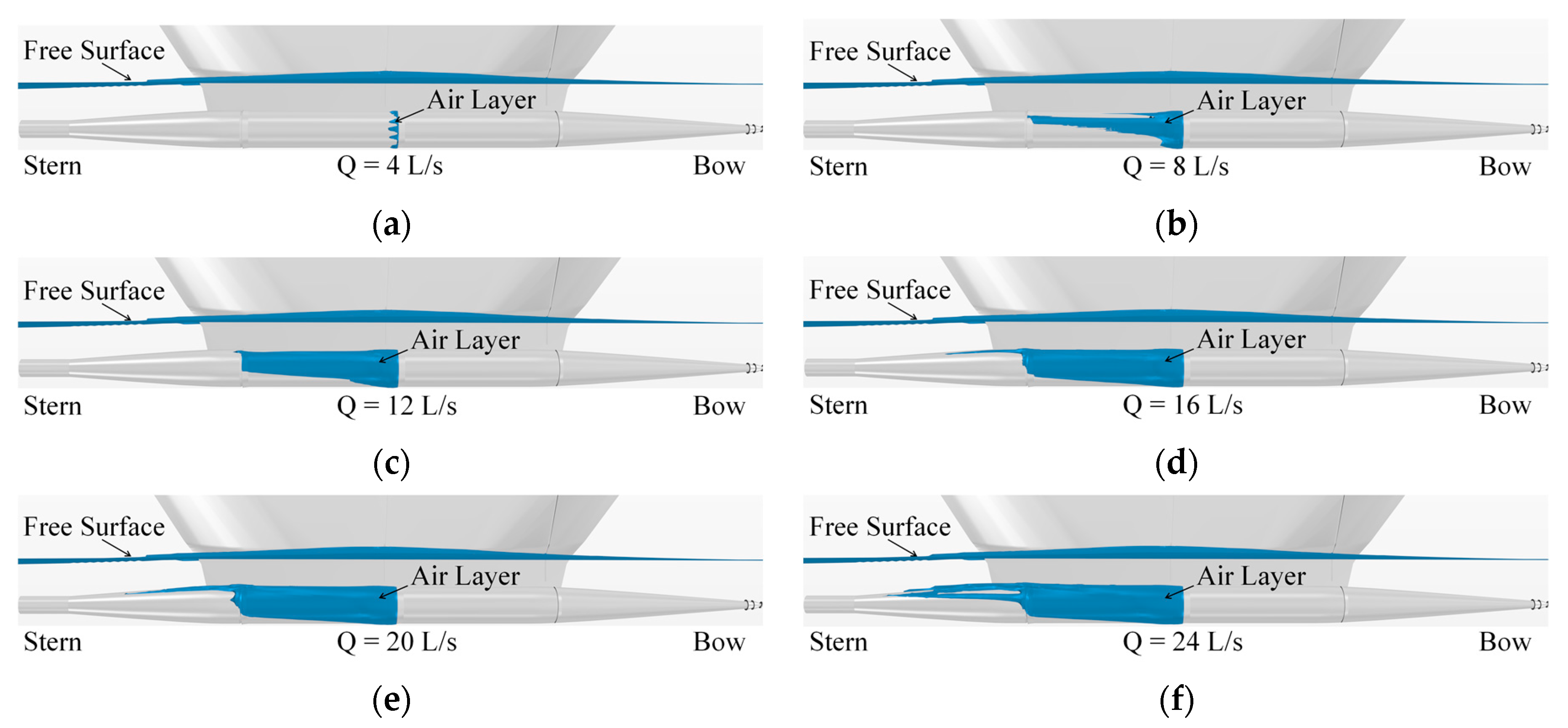
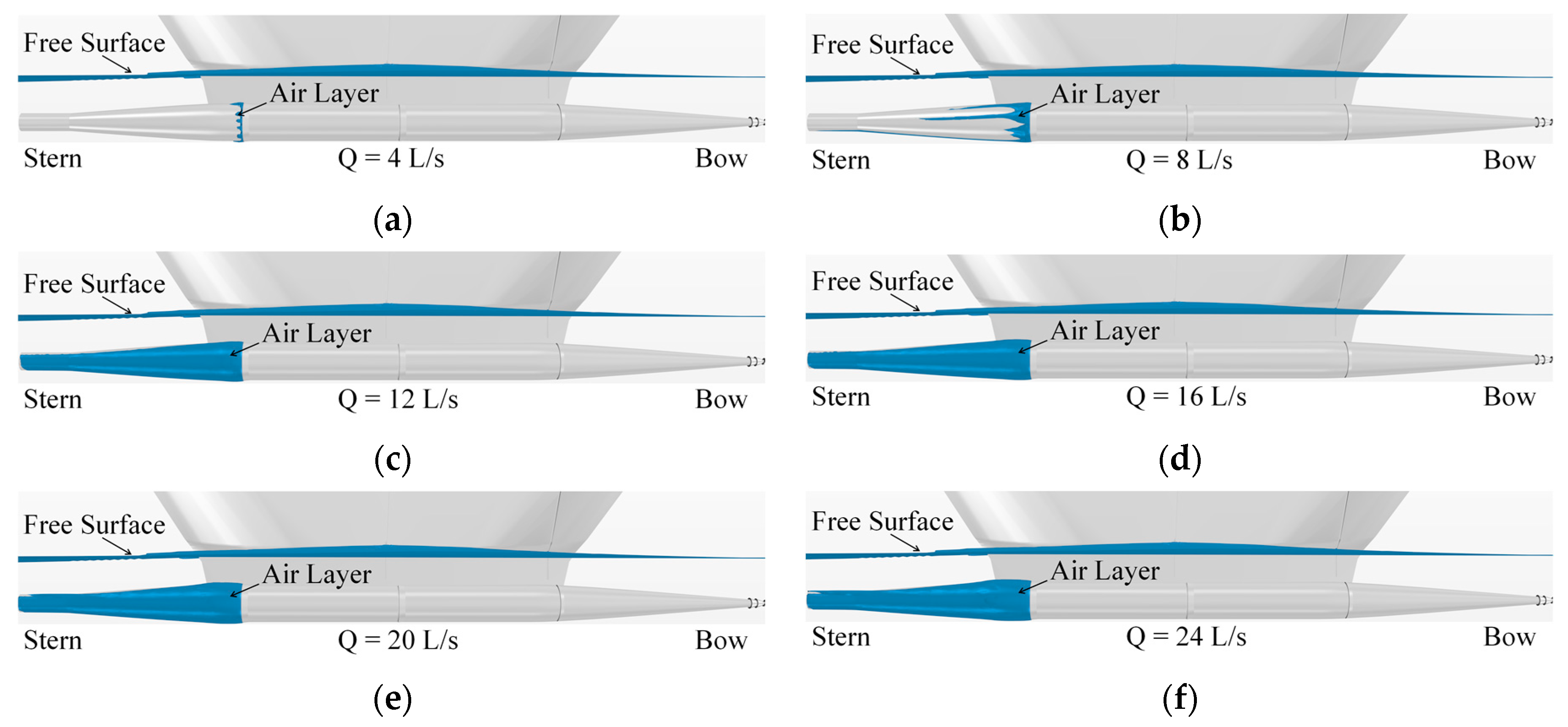
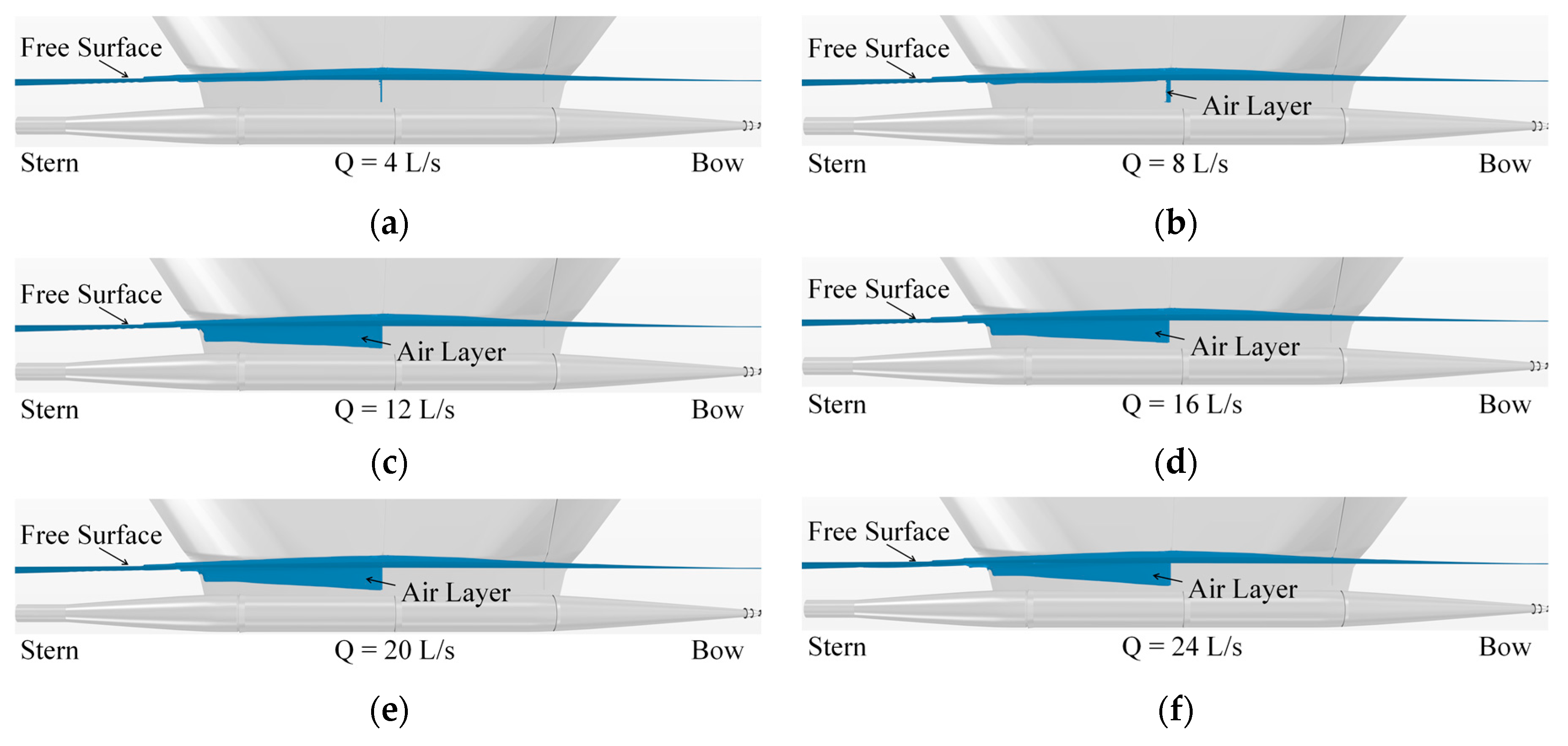
A similar phenomenon can be seen in
Figure 8,
Figure 9 and
Figure 10. The area of the air layer distribution increases with the increase in the airflow rate until the airflow rate reaches 12 L/s. When the airflow rate is more significant than 12 L/s, the difference in the air layer distribution is little.
Figure 11 and
Figure 12 show the air layer distribution with air injected from locations L5 and L6, which are set on the strut. It could be seen that, even if the airflow rate reaches 8 L/s, the air layer still could not be effectively covered, as shown in
Figure 11a,b and
Figure 12a,b. Comparing
Figure 11c and
Figure 12c, with the medium airflow rate, the air layer distribution of L6 is better than L5, and it is because that location L5 is set at the front side of the strut, which is harmful to the air layer distribution. When the airflow rate increase from 16 L/s to 20 L/s, the air layer distribution has not changed much, as shown in
Figure 11e,f and
Figure 12e,f. When the airflow rate increase to 24 L/s, the air layer area of L5 increases while the air layer area of L6 still has not changed much, as shown in
Figure 11f and
Figure 12f.
The air layer varies with different injection locations. The covering of the air layer will affect the performance of appendages, such as foils. According to the analysis of the calculated results, the air layer is thin. The coverage of the air layer mainly changes the fluid density around the area where the fins are connected with the hull surface, which will probably lead to a lifting loss. This paper mainly analyzes the air layer distribution under different injection locations and the airflow rates. So, the corresponding influence on the foils is not included in this paper.
4.2. Effect on the Underwater Body and the Strut
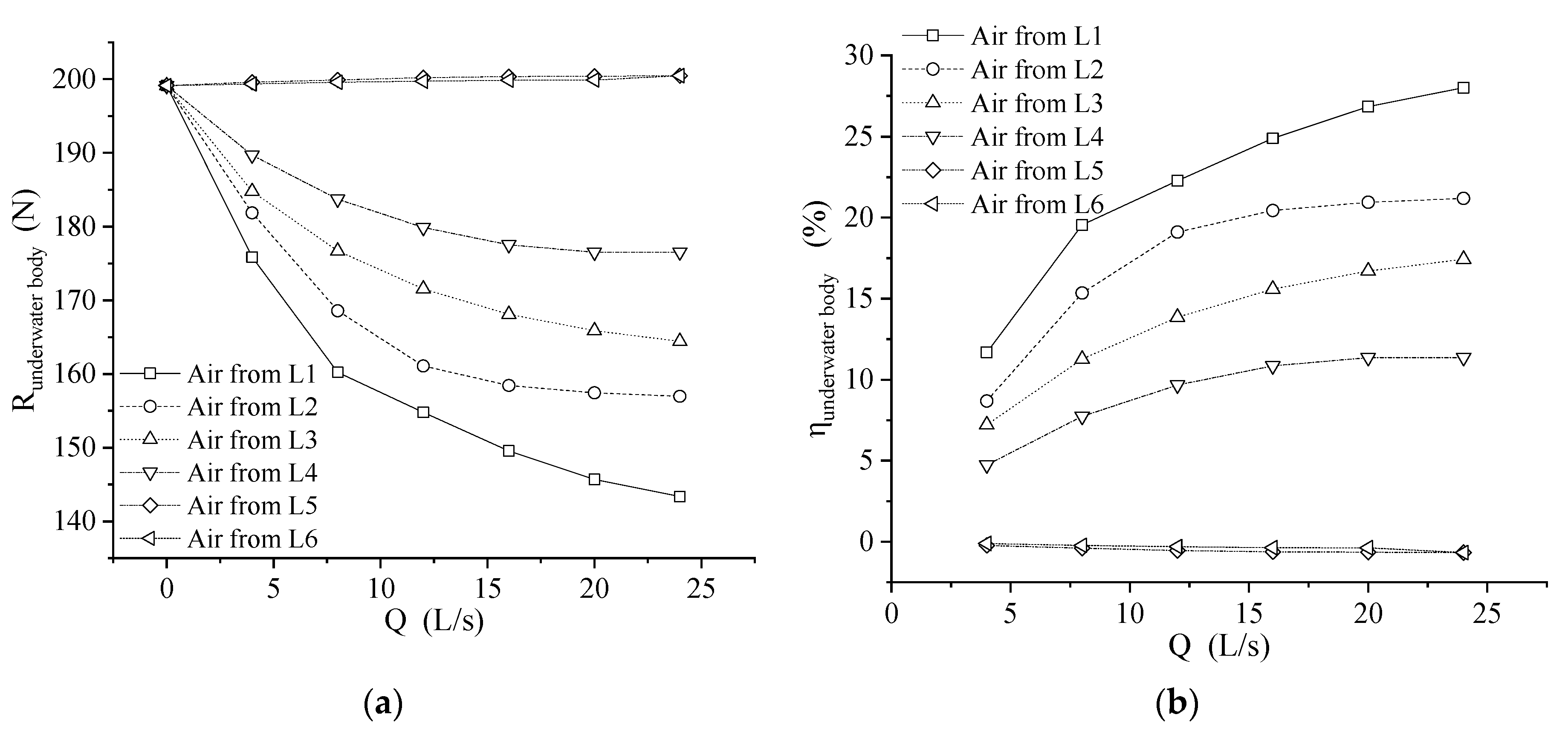
The computed result of resistance and drag reduction in the underwater body is shown in
Figure 13.
is the resistance of the underwater body.
is the resistance reduction rate of underwater body.
By
Figure 13, it could be found that the air injected from locations L5 and L6, which are on the strut, has a more negligible effect on the resistance and the drag reduction in the underwater body. It is because the air injected from the location on the strut has a tendency to the free surface under the effect of buoyancy. It could be seen that the air injected from the location which is closer to the head of the underwater body will lead to more negligible resistance and more significant drag reduction. It is because the air injected will diffuse along the surface of the underwater body in the opposite direction of the forward hull speed. It will reduce the resistance by covering the surface area in the air layer and the gas-water mixed layer. The closer the injection location is to the head, the larger the hull surface area that could be covered, which will lead to more negligible underwater body resistance and a more significant drag reduction in the underwater body.
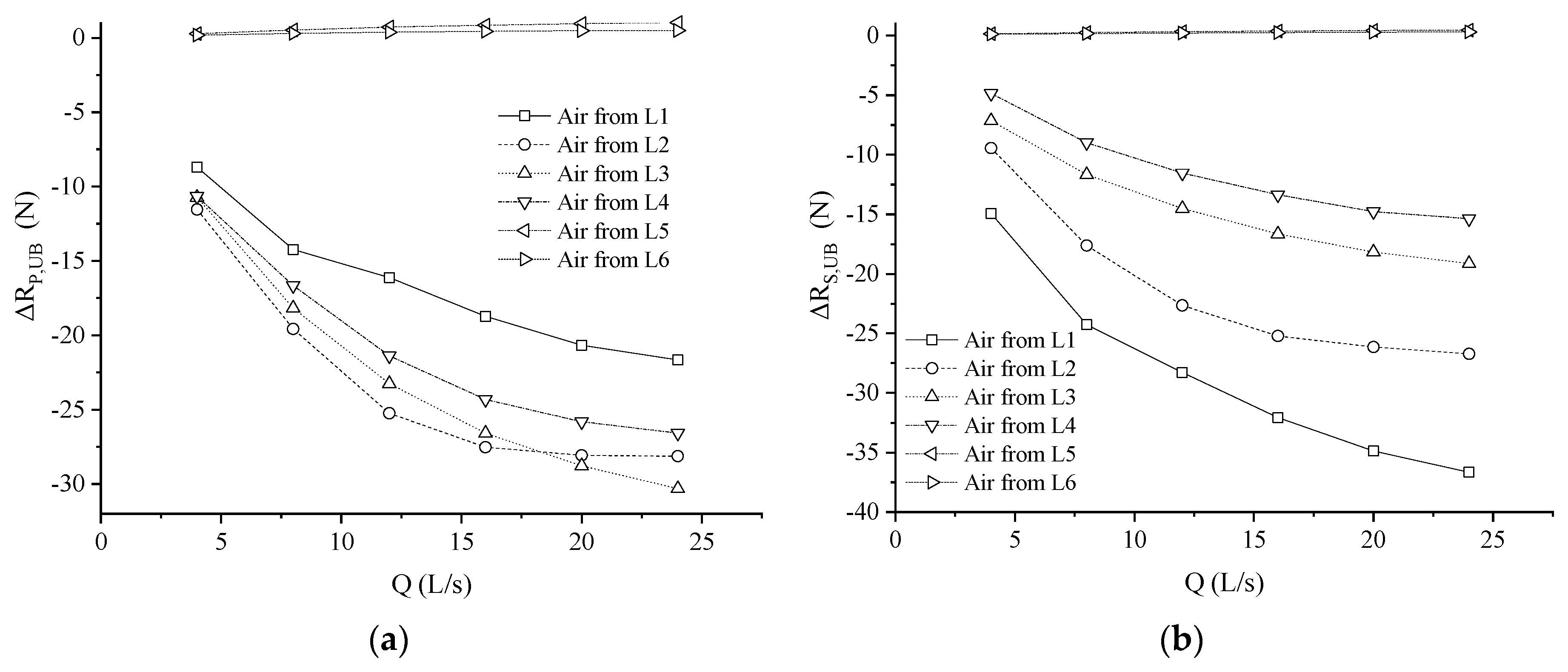
The changes in resistance components before and after air injection are shown in
Figure 14. Where
,
is the resistance component related to the shear force of the underwater body,
is the
with the air injection,
is the
without the air injection.
,
is the resistance component related to the pressure force of the underwater body,
is the
with the air injection,
is the
without the air injection.
By
Figure 14, it could be found that the air injected from locations L5 and L6 set on the strut, has a negligible effect on the
and the
. When the air injected from the locations L1, L2, L3, and L4 set on the underwater body, the
and the
decreases with the airflow rate. The
reduce 21.65 N, 28.13 N, 30.31 N, and 26.58 N with the airflow rate of 24 L/s. The
reduce 36.66 N, 26.71 N, 19.13 N, and 15.38 N with the airflow rate of 24 L/s.
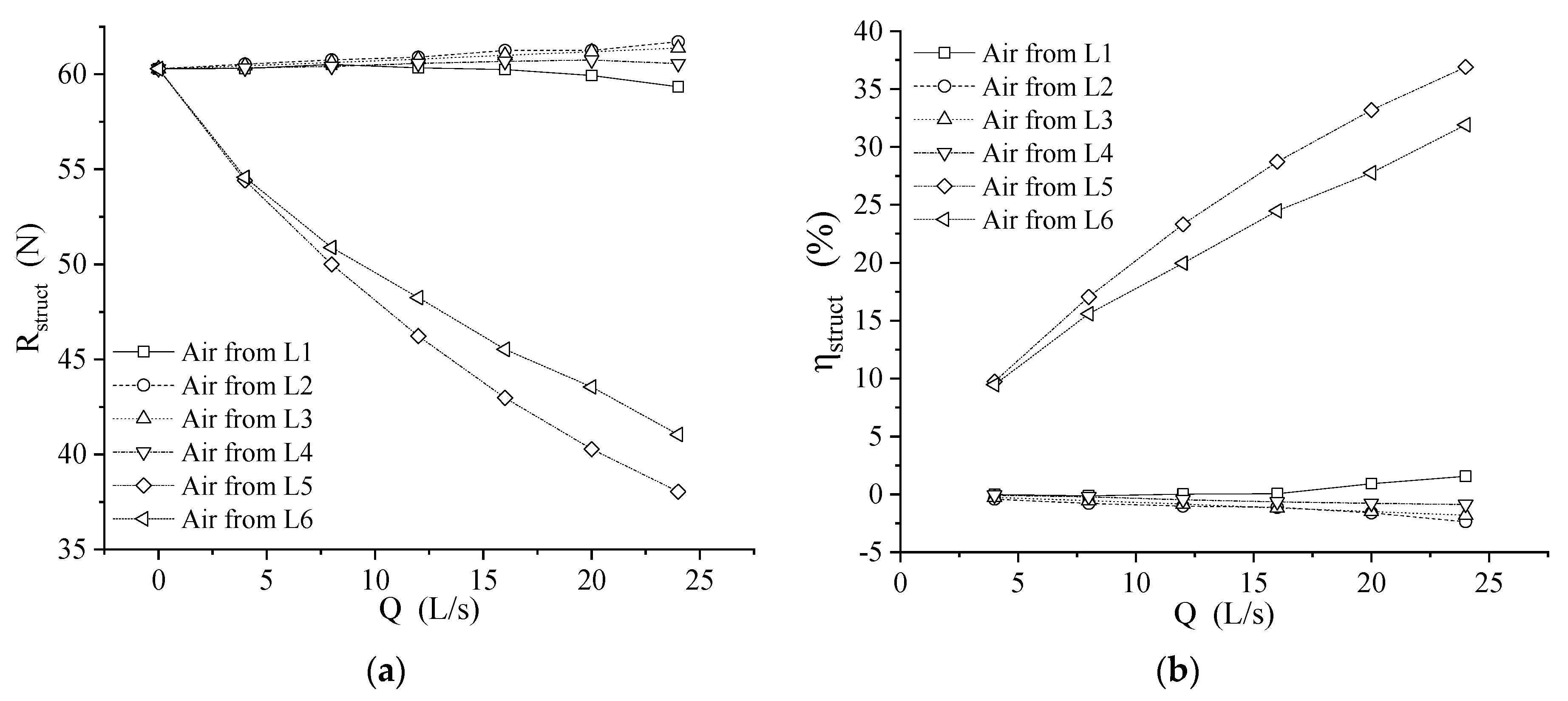
The computed result of resistance and drag reduction in the strut is shown in
Figure 15.
is the resistance of struts.
is the drag reduction rate of struts.
It could be seen that the air injected from strut locations L5 and L6 has a significant influence on the resistance and the drag reduction in the strut, as shown in
Figure 15. The higher airflow rate will lead to more negligible resistance and more significant drag reduction. It could also be noticed that the air injected from location L5 is more conducive to drag reduction than the air injected from location L6. On the airflow rate condition = 24 L/s, the drag reduction in the strut is 36.90% for injection location L5 and 31.92% for injection location L6. It could be found that the air injected from locations L1, L2, L3, and L4 have less influence on the resistance and the drag reduction in the strut for a low airflow rate no larger than 12 L/s. As the airflow rate grows, the resistance of the strut reduces, and the drag reduction in the strut is positive for the air injected from location L1, while the resistance of the strut increases and the drag reduction in the strut is negative.
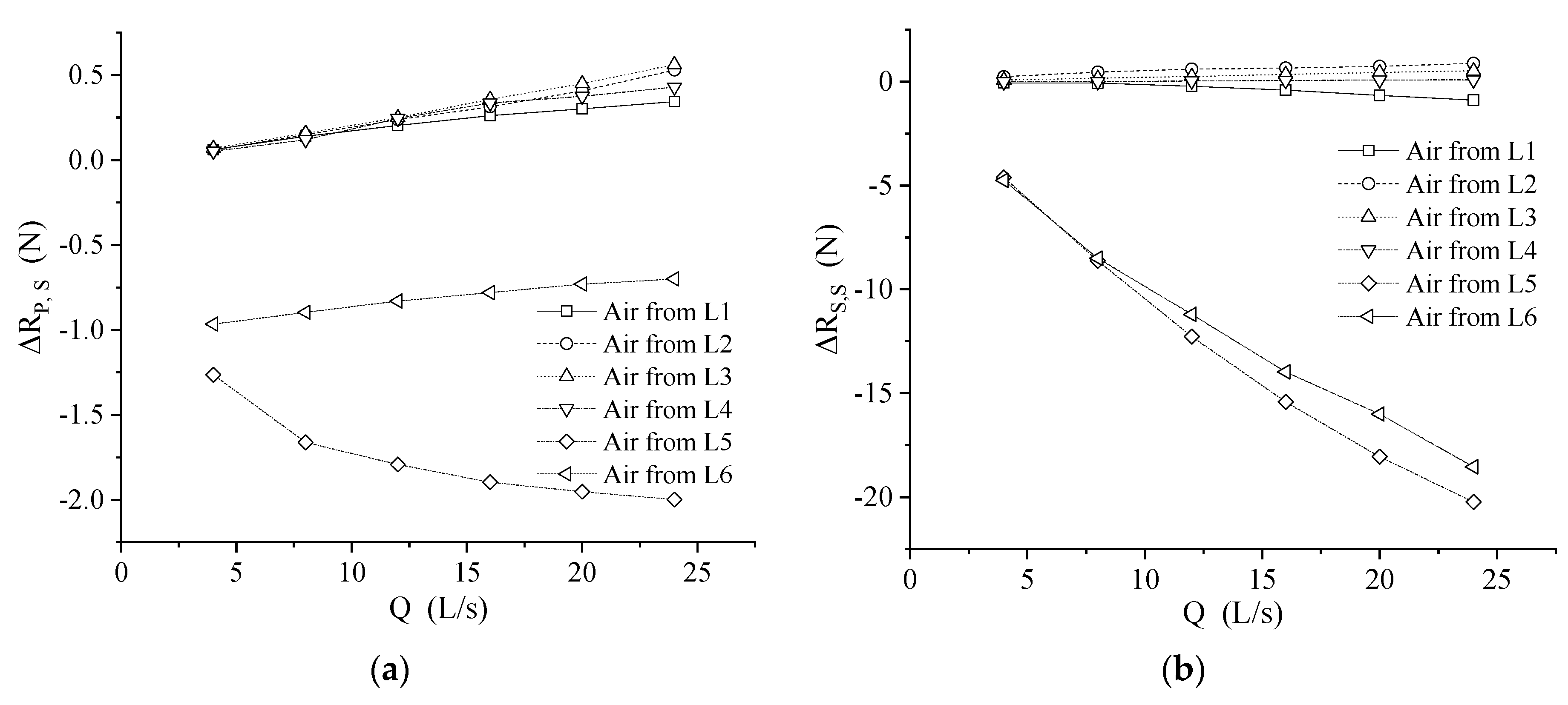
The total resistance has been discussed, and STAR CCM+ software provides a method of measuring resistance components, including
and
, where
is the resistance component related to the shear force, which could reflect the friction resistance, and
is the resistance component related to the pressure force, which could reflect the viscous pressure resistance and wave resistance. Thus, the changes in resistance components before and after air injection are measured to analyze the cause of the harmful drag reduction in the strut, as shown in
Figure 16. Where
,
is the resistance component related to the shear force of the strut,
is the
with the air injection,
is the
without the air injection.
,
is the resistance component related to the pressure force of the strut,
is the
with the air injection,
is the
without the air injection.
It could be seen that when the air was injected from location L5,
is <0 N and decreases as the airflow rate grows, as shown in
Figure 16a. It means that the air injected from location L5 will reduce the resistance component related to the pressure force of the strut, and the decrease is positive as the airflow rate increases. When the air is injected from location L6,
is also <0 N, but
will increase as the airflow rate grow, as shown in
Figure 16a. It means that the air injected from location L6 will reduce the resistance component related to the pressure force of the strut, but the decrease is negative as the airflow rate increases. The reason is that location L6 is arranged in the middle of the strut, the airflow could reduce the resistance component related to the pressure force of the area behind location L6, but with the airflow injected, the pressure distribution of the area at the front of location L6 will change, and the pressure will increase. With the airflow rate increasing, the influence of the airflow on the area at the front of location L6 gradually increases, which leads to
increasing as the airflow rate grows. It could be forecast that with the airflow rate continuing to increase, the
will be a positive value. It could be seen that,
is > 0 N and increases as the airflow rate grows when the air is injected from locations L1, L2, L3, and L4, as shown in
Figure 16a. It means that the air injected from the location on the underwater body will increase the resistance component related to the pressure force of the strut. It also could be noticed that, for the airflow rate > 12 L/s,
is most significant with the air injected from location L3 and is the slightest with the air injected from location L1, as shown in
Figure 17a. The longitudinal location of the injection location on the underwater body influences the resistance component related to the pressure force of the strut, and the closer the injection location is to the middle will lead to the more significant resistance component of the pressure force. By
Figure 16b, it can be seen that when the air was injected from the locations L5 and L6,
are < 0 N and decrease as the flow rate grows. When the airflow rate is ≦8 L/s, there is not much difference between the
of location L5 and L6. When the airflow rate is >8 L/s,
of location L5 is smaller than location L6. It means that the airflow injected from location L5 has a greater effect on the resistance component related to the sheer force of the strut than the air injected from location L6.
is > 0 N and increases as the airflow rate grows when the air is injected from the locations L2, L3, and L4, while
is negative and decreases as the airflow rate grows for the air injected from location L1. By
Figure 16, it could be found that the air injected from the locations L2, L3, and L4 has a negative influence on the drag reduction in the strut, which could also be seen in
Figure 15.
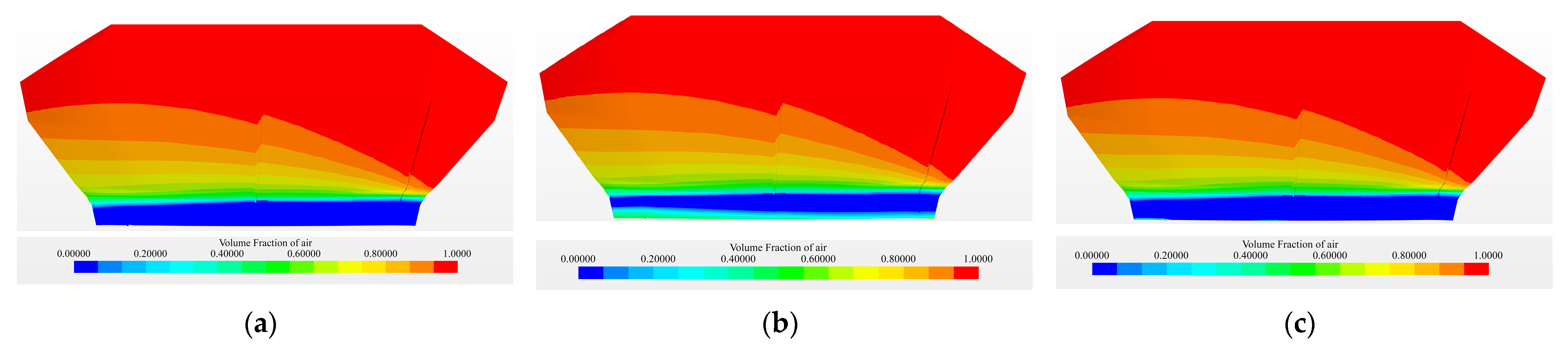
The volume fractions of air of the strut are shown in
Figure 17, in which the different colors represent different volume fractions of air. In the dark red area, the volume fraction of air
1, while the volume fraction of air
0 in the dark blue area. The yellow area is the water splash range. By
Figure 17, it can be seen that the air injected from location L1 could increase the air volume fraction of the bottom of the strut, which is the reason for the negative
, as shown in
Figure 16b. By
Figure 17, it can be seen that the air injected from location L3 could increase the height of the water splash effect, which is the reason for the positive
, as shown in
Figure 16b.
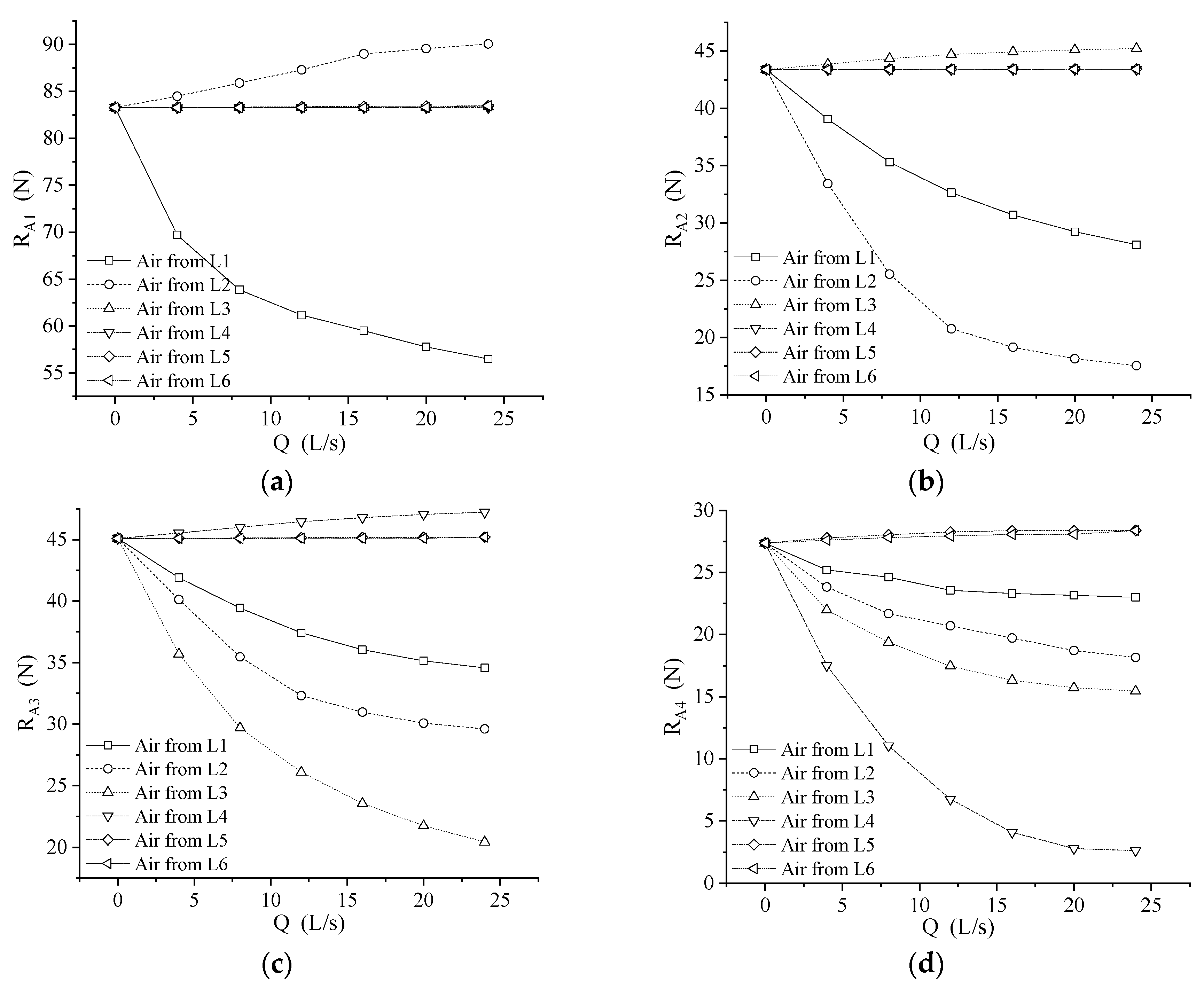
4.3. Effect on the Different Areas of the Underwater Body
The computed result of resistance and drag reduction in different areas of the underwater body is shown in
Figure 18.
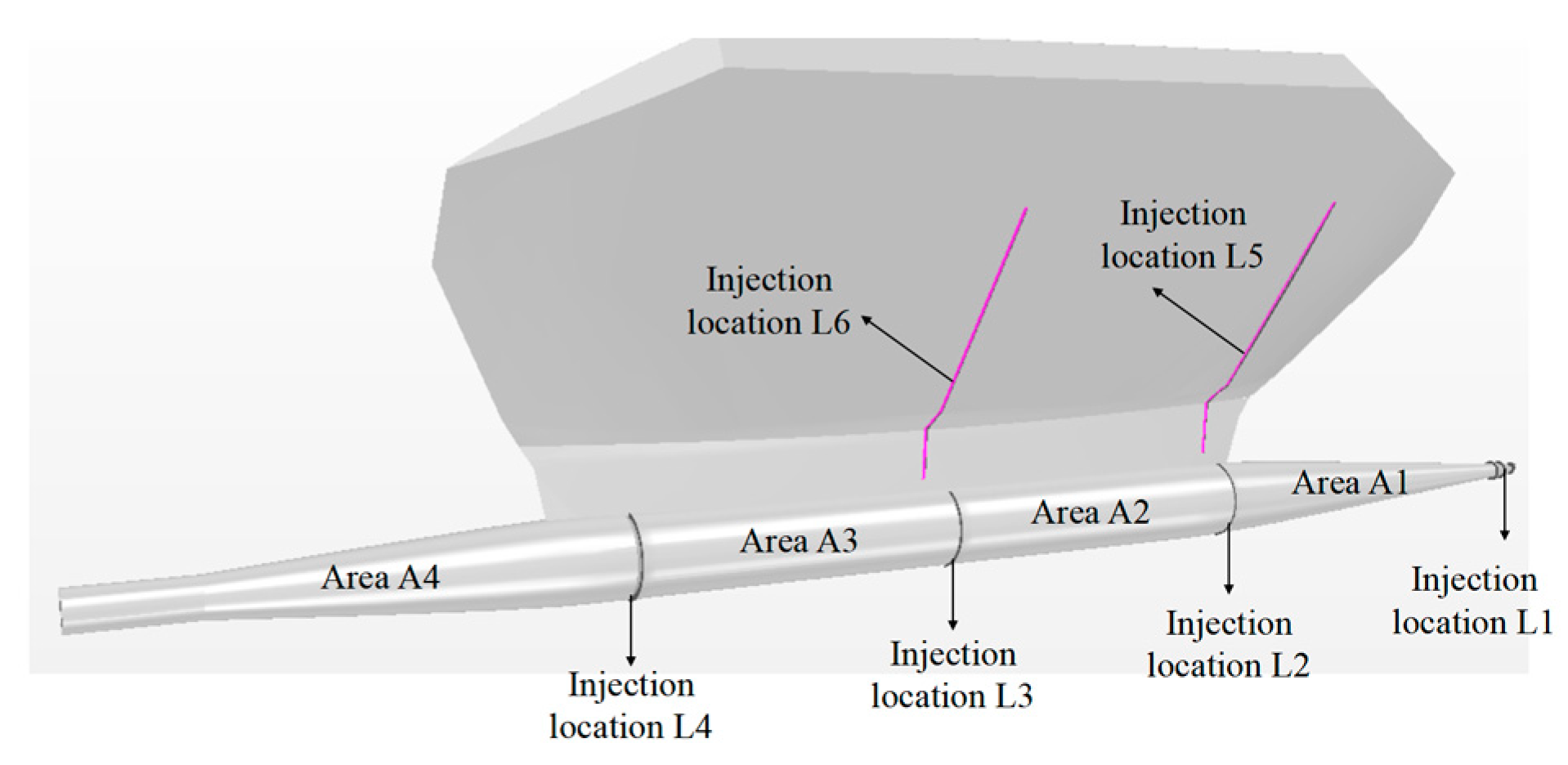
The areas of the underwater body can be seen in
Figure 3. It could be noticed that the resistance of a particular area of the underwater body is most affected by the forward injection location, which is nearest to it, as shown in
Figure 18. The most negligible resistance of A2, A3, and A4 appear separately when the air is injected from injection locations L2, L3, and L4. It could also be found that the resistance of a particular area will increase when the air is injected from the backward injection location which is nearest to it, as shown in
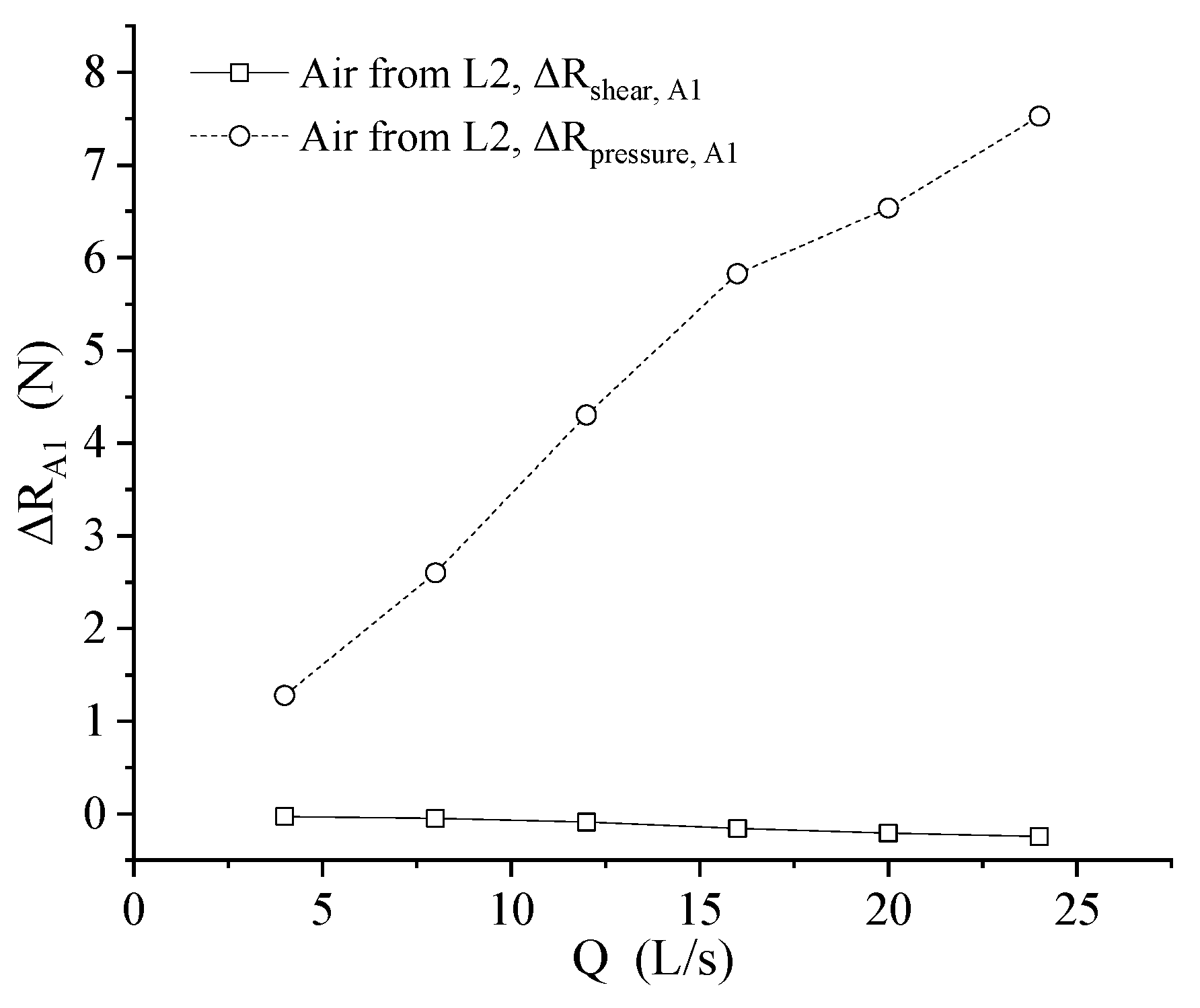
Figure 18. For example, when the air is injected from location L2 with the airflow rate of 12 L/s, the resistance of A1 increases by 7.21 N. The changes of
and
with the air injected from L2 is shown in
Figure 19.
It could be seen that
is positive and increases with the airflow rate while
is still close to 0, as shown in
Figure 19. It means that the air injected from location L2 will increase the resistance component related to the pressure force of A1. The higher airflow rate will lead to a more significant resistance component related to the pressure force. It could notice that the airflow injected from location L2 cannot cover area A1, as shown in
Figure 8, but the airflow could change the pressure distribution of area A1. That is the reason that
is positive and increases with increasing the airflow rate of location L2, while
is negligibly affected by the airflow.
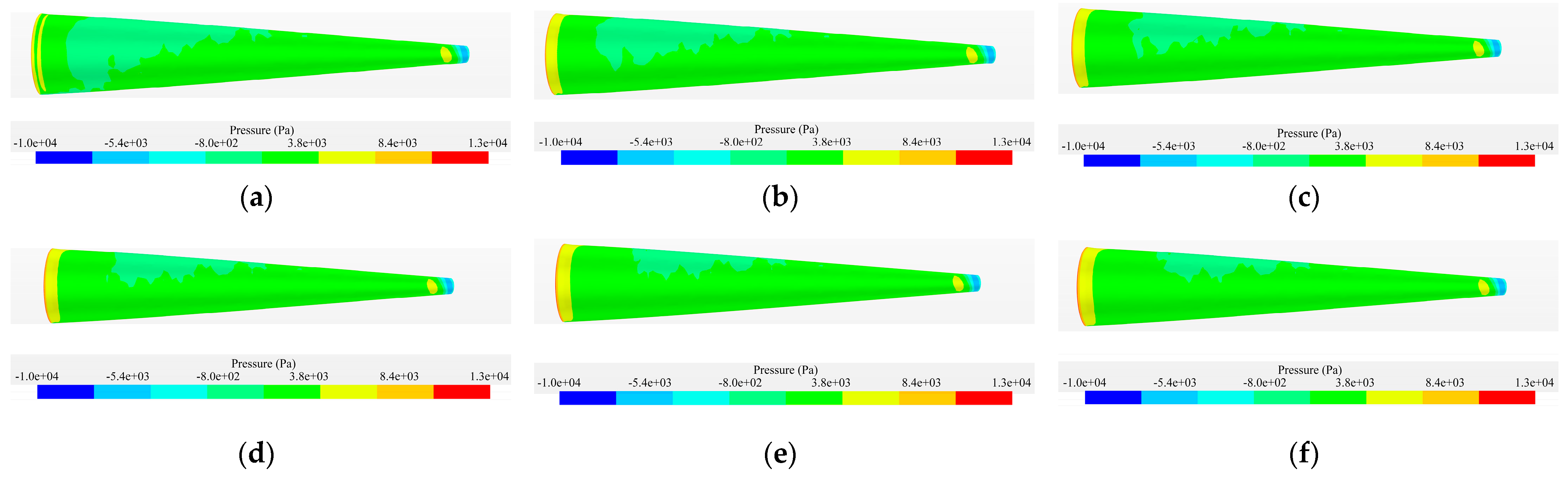
Figure 20 shows the pressure distribution of A1 with the air injected from location L2, which could explain the reason for the rising
phenomenon. It can be seen that the area near the injection location L2 is a high-pressure area, and the pressure in most areas of A1 is between −800 Pa and 3800 Pa, as shown in
Figure 20. As the flow rate increases, the area with pressure between −800 Pa and 1500 Pa decreases, and the area with pressure between 1500 Pa and 3800 Pa increases. Besides, the high-pressure area near the injection location L2 increases, too. It means that the overall pressure of area A1 increases with the airflow rate, which is the reason that
is positive and increases with the airflow rate, as shown in
Figure 19.
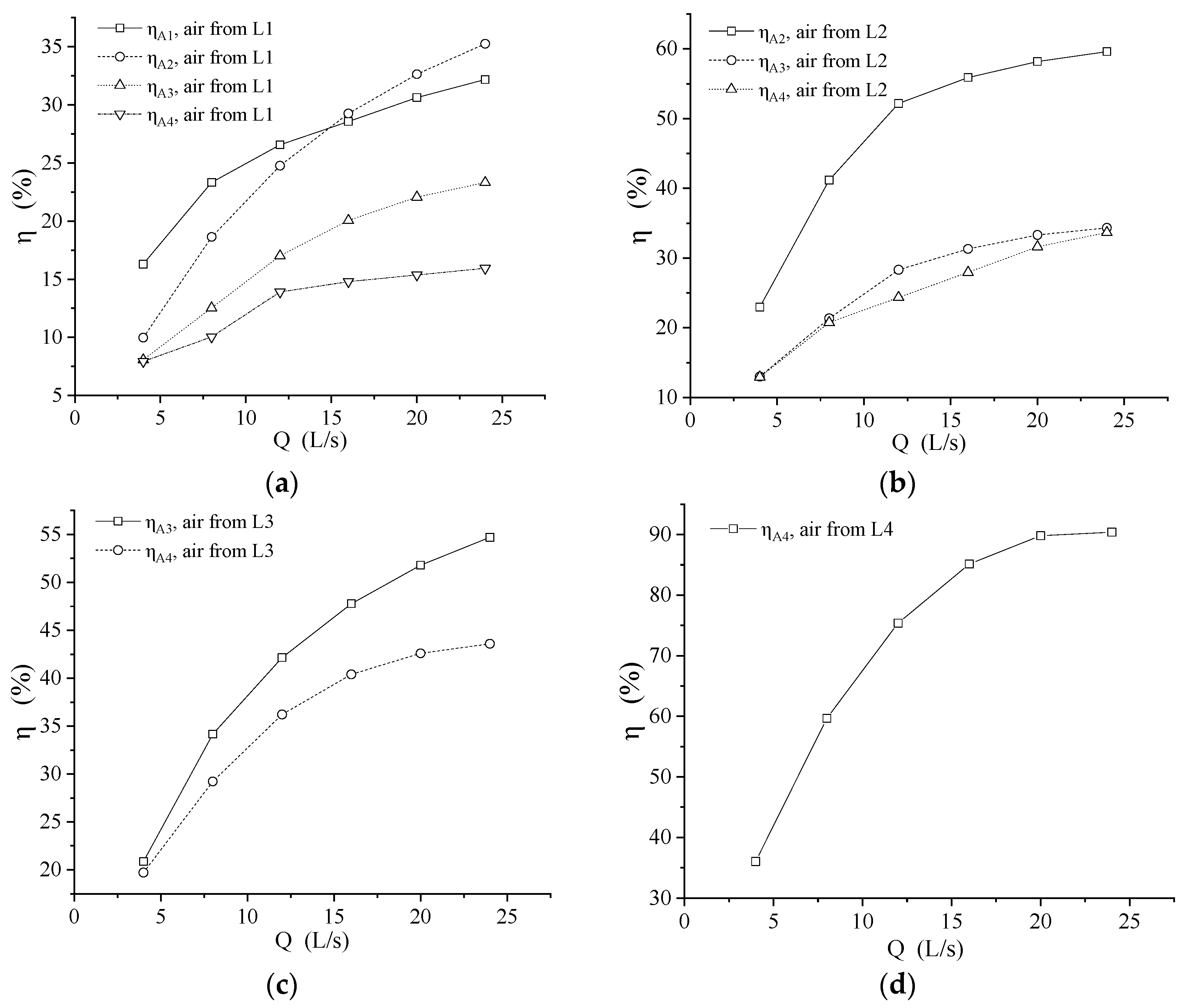
Figure 21 shows the drag reduction in different underwater areas at various airflow rates with other air injection locations.
is the drag reduction in different underwater areas, where
,
,
and
is the drag reduction in A1, A2, A3 and A4, respectively. It could be seen that, with the air injected from L1, the drag reduction in A1 is the largest for the airflow rate ≤ 12 L/s, while the drag reduction in A2 is the largest for the airflow rate ≥ 16 L/s, as shown in
Figure 21a. It could be noticed that the most considerable drag reduction in different areas has a significant difference. The drag reduction in A4, which is in the stern area of the underwater body, could reach 90%. The drag reduction in A2 and A3, which are in the middle area of the underwater body, could obtain 50%. The drag reduction in A1, which is in the bow area of the underwater body, could reach 30%. It probably means that there are significant differences in the drag reduction effect of air injection on each area of the underwater body. The stern area has the best impact, and the middle area and the bow area have the worst effect.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}