1. Introduction
Hydraulic transmission has the advantages of high power density, fast response speed, and high load resistance stiffness [
1], which is widely used in marine equipment, aerospace equipment, mining machinery, construction machinery, and other mechanical equipment (
Figure 1) [
2,
3,
4]. Among them, the working environment of marine engineering machinery and equipment is very complex and harsh, and it has the high requirements for the safety, stability, and reliability of its hydraulic transmission system [
5,
6,
7]. As one of the commonly used “power hearts” of hydraulic transmission systems, axial piston pumps have a very wide range of applications in the fields of hydraulic transmission and intelligent control due to their small moment of inertia, compact structure, high rotational speed, easy variables, and other characteristics [
8,
9]. It plays a vital role in ensuring the stability and reliability of the hydraulic transmission system. However, the structure of a hydraulic axial piston pump is complex, and it often faces harsh working conditions such as high pressure and variable load [
10,
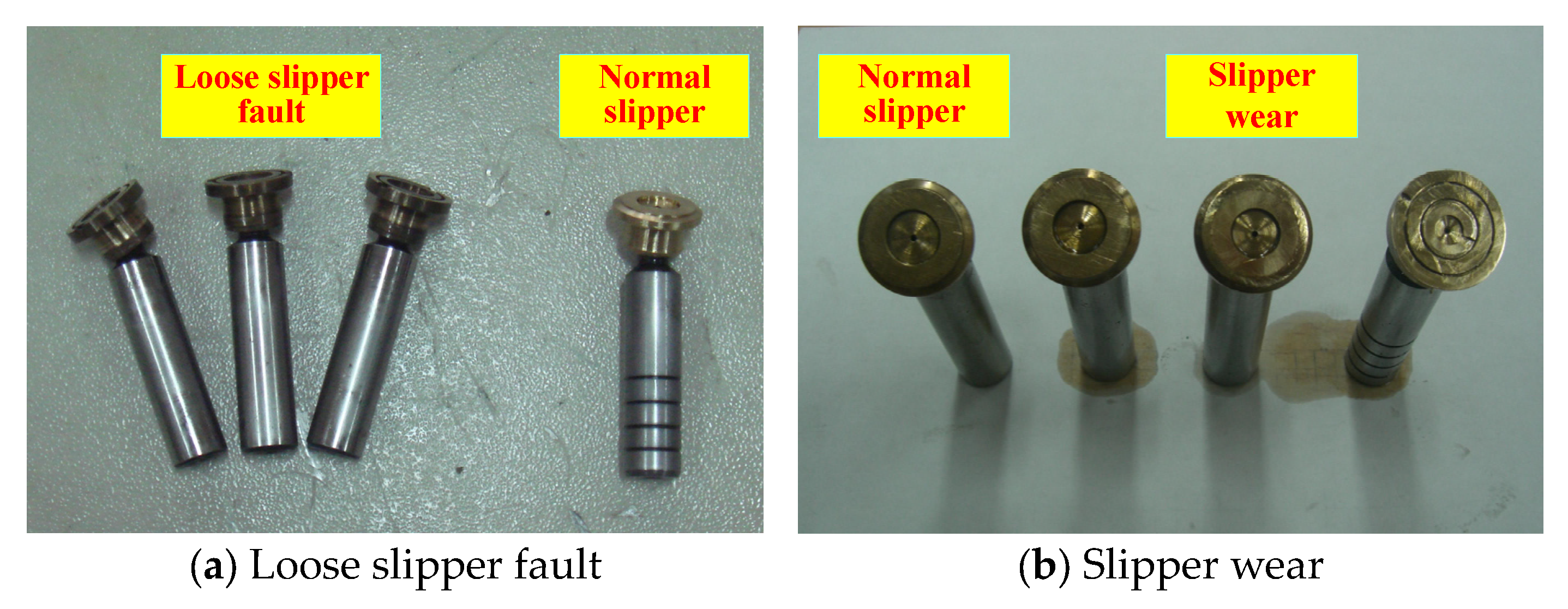
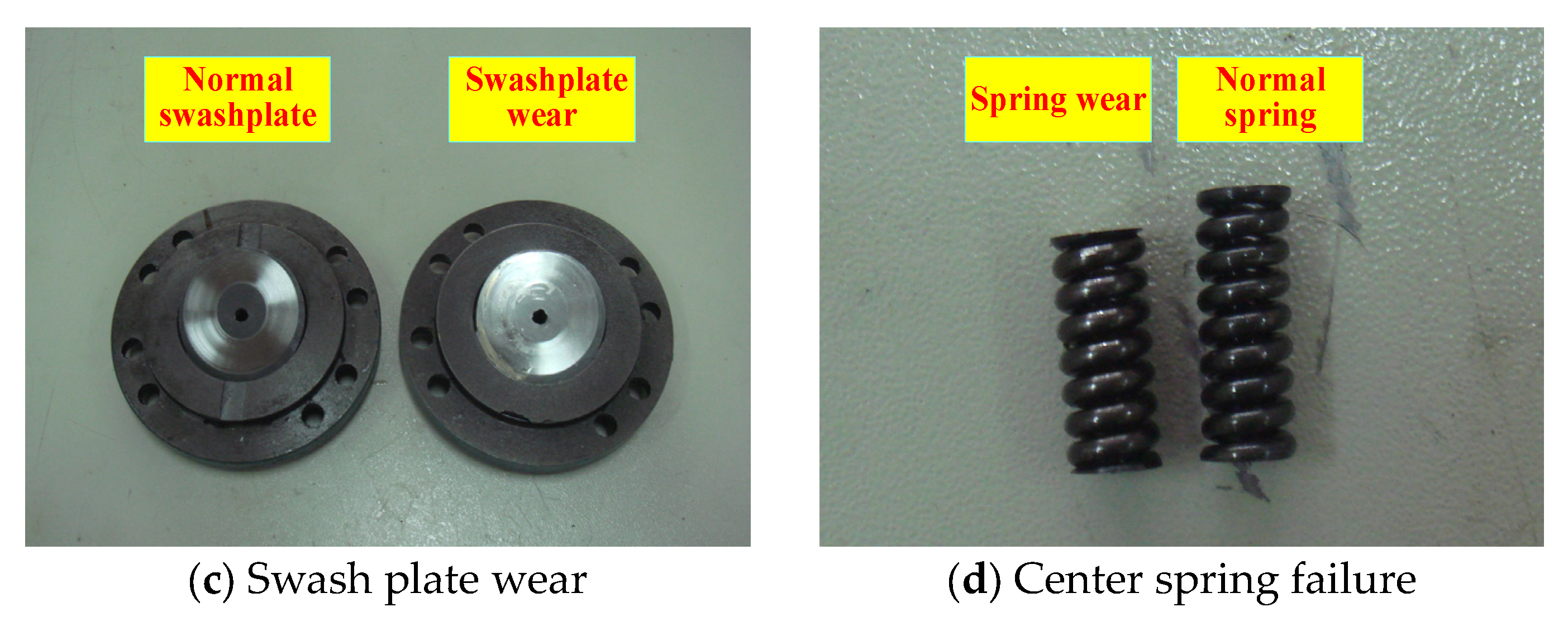
11]. The key components such as slipper, swash plate, and central spring are prone to wear failure. The failure will lead to the unstable operation of the hydraulic system, abnormal operation of the equipment, economic losses, and even endanger personal safety. Therefore, in order to ensure the safety and reliability of the whole machine and reduce the incidence of disaster accidents, it is very important to achieve an efficient, accurate, and intelligent diagnosis of typical faults of hydraulic axial piston pumps.
In 2006, Hinton first proposed the theory of deep learning (DL) in science. Since then and in recent years, the fault diagnosis of mechanical equipment has always attracted the attention of domestic and foreign scholars [
12]. With the development of science and technology, DL has been widely used and achieved great success in computer vision, natural language processing, image processing, and other fields [
13,
14]. At the same time, the emergence of DL also brings new ideas and methods for intelligent fault diagnosis of mechanical equipment such as hydraulic axial piston pumps.
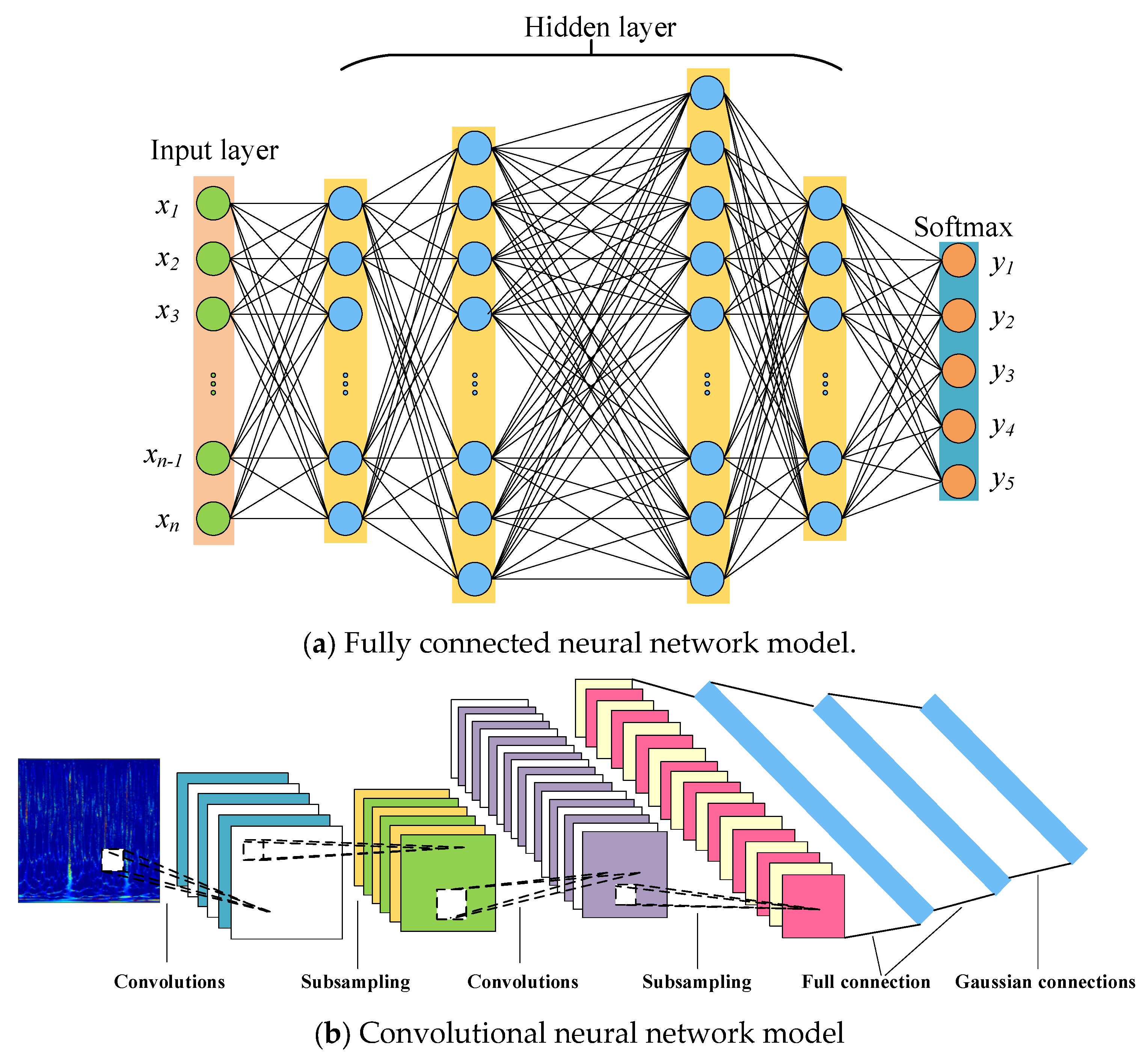
The intelligent fault diagnosis method of mechanical equipment based on the DL theory is typically represented by convolutional neural networks (CNNs). The commonly used CNN models include LeNet-5, AlexNet, VGG, and GoogLeNet. Owing to the powerful self-learning ability and feature extraction ability of the CNN, it has been applied in the field of fault diagnosis. To solve the problem of low diagnostic accuracy caused by insufficient samples, Zhao et al. used stochastic wavelet expansion for data enhancement and generated synthetic samples as training sets to train a one-dimensional CNN with two-layer convolution. The fault diagnosis of aero hydraulic pumps was achieved with small samples. The complex and changeable working conditions made the failure mechanism of mechanical equipment unclear, and it is difficult to use feature matching for fault diagnosis [
15]. By using a CNN model structure with five hidden layers, Wang et al. proposed a CNN method for fault classification based on the minimum entropy deconvolution. Compared with the traditional CNN method, this method can better complete the multi-fault classification of axial piston pumps [
16]. By combing the ResNet model, He et al. proposed a multi-signal adversarial fusion model based on transfer learning. The method solved the problem of fault diagnosis of hydraulic axial piston pumps under the condition of uneven data distribution. The average diagnosis accuracy reached more than 98.5% [
17]. By using spectral denoising and the improved LeNet-5 model, Chao et al. processed one-dimensional vibration data through the short-time Fourier transform to complete the fault identification of high-speed axial piston pumps. The method significantly improved the CNN model in the noise environment. In order to further improve the fault diagnosis performance of axial piston pumps, a decision-level multi-sensor fusion diagnosis method was proposed. The vibration data of three channels were sent to three identical LeNet-5 models to generate preliminary classification results. Then, the results were fused to obtain the final prediction results [
18]. The classification accuracy was increased by about 2%, 4%, and 5% after fusion [
19]. To achieve the deep mining of features, Tang et al. constructed an adaptive LeNet-5-Bayesian optimization model based on the Gaussian process, and carried out the fault diagnosis of an axial piston pump driven by the vibration signal. Compared with the traditional LeNet-5, the accuracy was increased by 2.92%, and the typical fault states of an axial piston pump were effectively identified [
20]. The above models were applied to the pressure signal analysis to achieve the fault diagnosis of axial piston pumps. The average accuracy of fault diagnosis reached 99.51%, which was 5.45% higher than the traditional LeNet-5 model [
21]. Due to the dependence on a large number of signal processing techniques and expert diagnosis experience as well as the time-consuming limitations of data pre-processing of traditional mechanical fault diagnosis, Zhu et al. constructed a particle swarm optimization (PSO)-Improved-CNN diagnostic model to classify and identify the typical state data of hydraulic piston pumps and obtained a high diagnosis accuracy of 99.06% [
22]. To solve the uncertainty of manual parameter adjustment, they continued the research and identified the fault of an axial piston pump based on acoustic signals compared with the classical CNN models such as AlexNet, VGG11, VGG13, VGG16, and GoogLeNet; the results indicated that the method had stronger stability and higher diagnostic accuracy [
23]. For other rotating machinery, Sinitsin et al. combined with hybrid input for rolling bearing diagnosis, a bearing fault diagnosis method is proposed based on the hybrid CNN–MLP model. The hybrid model is superior to CNN and MLP models in separation, and the detection accuracy of bearing fault can reach 99.6% [
24]. Choudhary et al. used multi-input convolutional neural net-work (MI-CNN) technology to fuse the characteristics of vibration signals and acoustic signals, and proposed a vibration–acoustic fusion technology for the fault diagnosis of induction motors under different working conditions. The effectiveness of the method is verified by bearing and gearbox datasets. This method can accurately and efficiently achieve the fault diagnosis of the motor and can be applied to other rotating machinery [
25]. Glowacz proposed a new feature extraction method named power of normalized image difference (PNID). The deep neural networks GoogLeNet, ResNet50, and EfficientNetB0 were used to analyze the thermal image of the fault axis of the brushless DC motor, and a high-precision fault diagnosis was achieved [
26]. As compound faults are difficult to accurately identify, Dibaj et al. used only a single fault dataset to train the CNN. When the obtained CNN output probability meets a set of probabilities, the untrained compound fault state is alarmed. The performance of the fine-tuning VMD and the proposed hybrid method was evaluated by decomposing the simulated vibration signal and analyzing the composite fault scenario of the gearbox system. The experimental results show that this method has high accuracy in compound fault diagnosis, small fault feature extraction, and serious fault classification [
27].
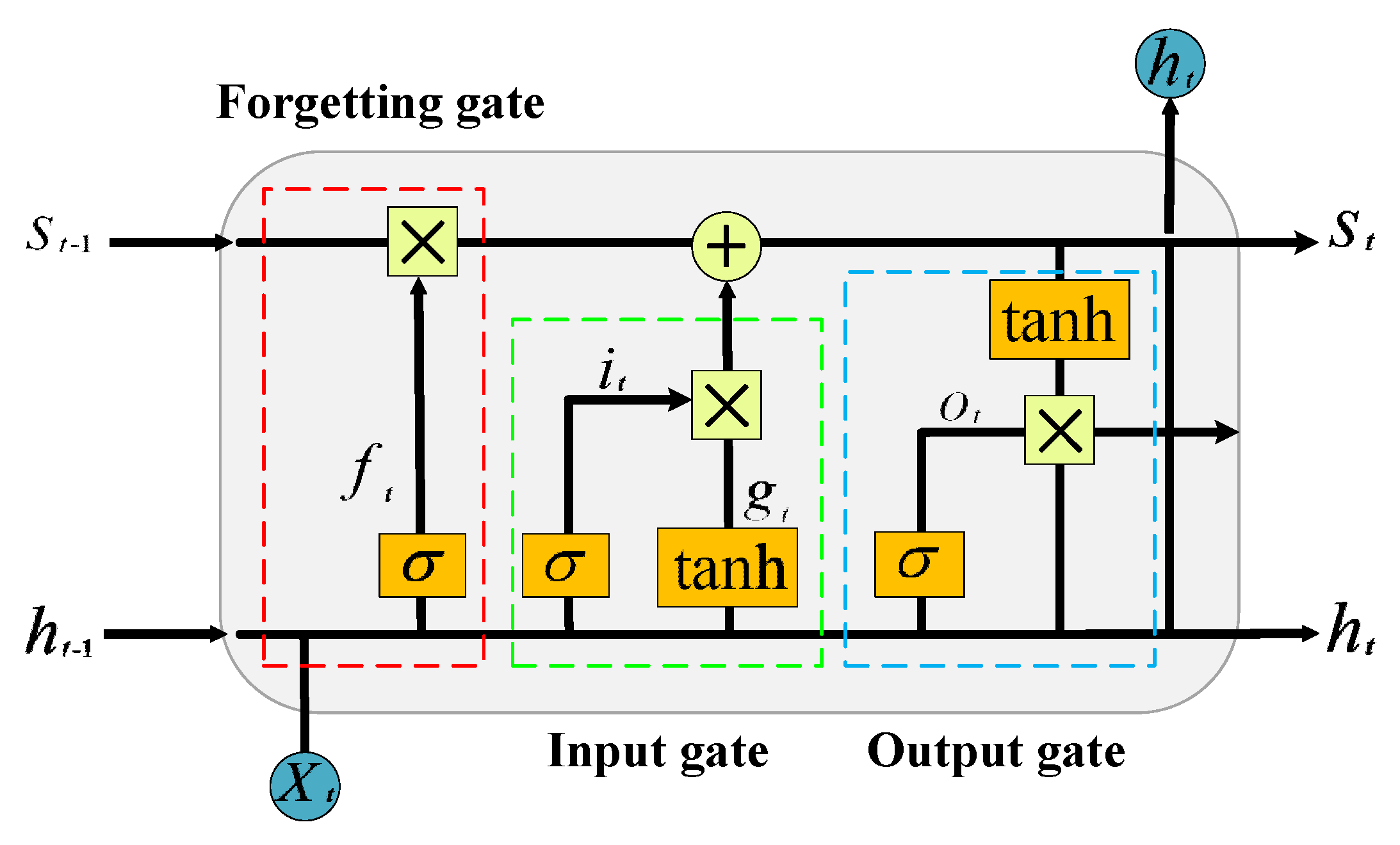
A recurrent neural network (RNN) is also the main model of deep neural networks. Long short-term memory (LSTM) is a variant of an RNN, which solves the problem of training difficulty from gradient disappearance and gradient explosion in ordinary recurrent neural networks. It is more suitable for processing time series information. LSTM has successful applications in speech recognition, text recognition, and is also used in the field of fault diagnosis of mechanical equipment [
28,
29]. To improve the operational reliability of the wind turbine gearbox, Zhu et al. proposed an evaluation framework of DL-based multi-indicator operating conditions to predict the real-time operation state of wind turbines based on LSTM networks by analyzing the operating condition monitoring data of wind turbines. The method effectively detected the potential faults of wind turbines [
30]. In view of the inconsistent distribution of fault monitoring data among wind turbines, a prediction method combined with LSTM, fuzzy synthesis, and feature transfer learning was proposed to sensitively detect potential faults of wind turbines, which could effectively predict the operating state of the wind turbine [
31]. By using 1D-CNN for feature extraction and combining it with the temporal correlation between LSTM learning features, Sun et al. proposed a fault diagnosis method based on 1DCNN-LSTM and LeNet-5 to achieve the end-to-end intelligent fault diagnosis of bearings [
32]. The average fault recognition accuracy rate reached more than 99%. By decomposing the vibration signal of the reciprocating pump, Bie et al. proposed an improved deep neural network based on the adaptive noise empirical mode decomposition method [
33]. They established a classification model based on the LSTM deep network to accurately identify the failure mode. Zhao et al. combined CNN and LSTM networks to achieve multi-fault classification of the main pump of a converter station, with the accuracy rate of 98.7% [
34]. By using LSTM, Khan et al. evaluated the operating state of industrial mud pumps to achieve the prediction of the remaining life [
35]. At present, although the application of LSTM in the field of mechanical equipment fault diagnosis is gradually expanding, there are relatively few studies on fault diagnosis of axial piston pumps based on RNNs.
The fault data of the axial piston pump have evident temporality. The RNN model can effectively and accurately process this type of data, while it has no feature extraction capability and generally takes time domain or frequency domain signals as part of the preprocessing. These preprocessing methods do not have high feature extraction efficiency as does a CNN, and the relevant parameters also need to be manually adjusted under multiple working conditions. CNNs and RNNs are the two most common deep learning networks. They are widely used in fault diagnosis of hydraulic axial piston pumps, but there are still some challenges and problems in the current research.
(1) Most of the research on deep learning models focuses on the intelligent fault diagnosis of bearings, gearboxes, and motors, and is still relatively rare on hydraulic axial piston pumps. The structure and working mechanism of this kind of pump are complex. The concealment and coupling of its faults make it more valuable and challenging for fault diagnosis and condition monitoring.
(2) The traditional intelligent diagnosis method performs time-consuming preprocessing on the original signal. In addition, the understanding of equipment failure mechanism and data preprocessing technology is stricter.
(3) CNN does not have memory ability, and the calculation time is too long; LSTM cannot effectively address high-dimensional data, and there will be a long-term dependence problem when the sample sequence is too long. It is difficult to identify when addressing faults with similar features.
Therefore, the main contributions of this work are as follows:
(1) Aiming at the special structure and mechanism of a hydraulic axial piston pump, the intelligent fault diagnosis of a hydraulic axial piston pump is explored. Non-destructive condition monitoring is achieved by using the characterization information of pump body as data source. It makes full use of the characteristics of the original sensor information in the time domain and frequency domain, eliminating the complex and time-consuming signal preprocessing steps.
(2) Different working conditions are set up, and different wear degrees of the same fault type are included in the analysis. The performance of the proposed method is discussed from different perspectives. Using the feature extraction ability of a CNN for high-dimensional information and the high-precision recognition ability under supervised learning, the time–frequency feature self-learning and classification of the hydraulic axial piston pump are achieved.
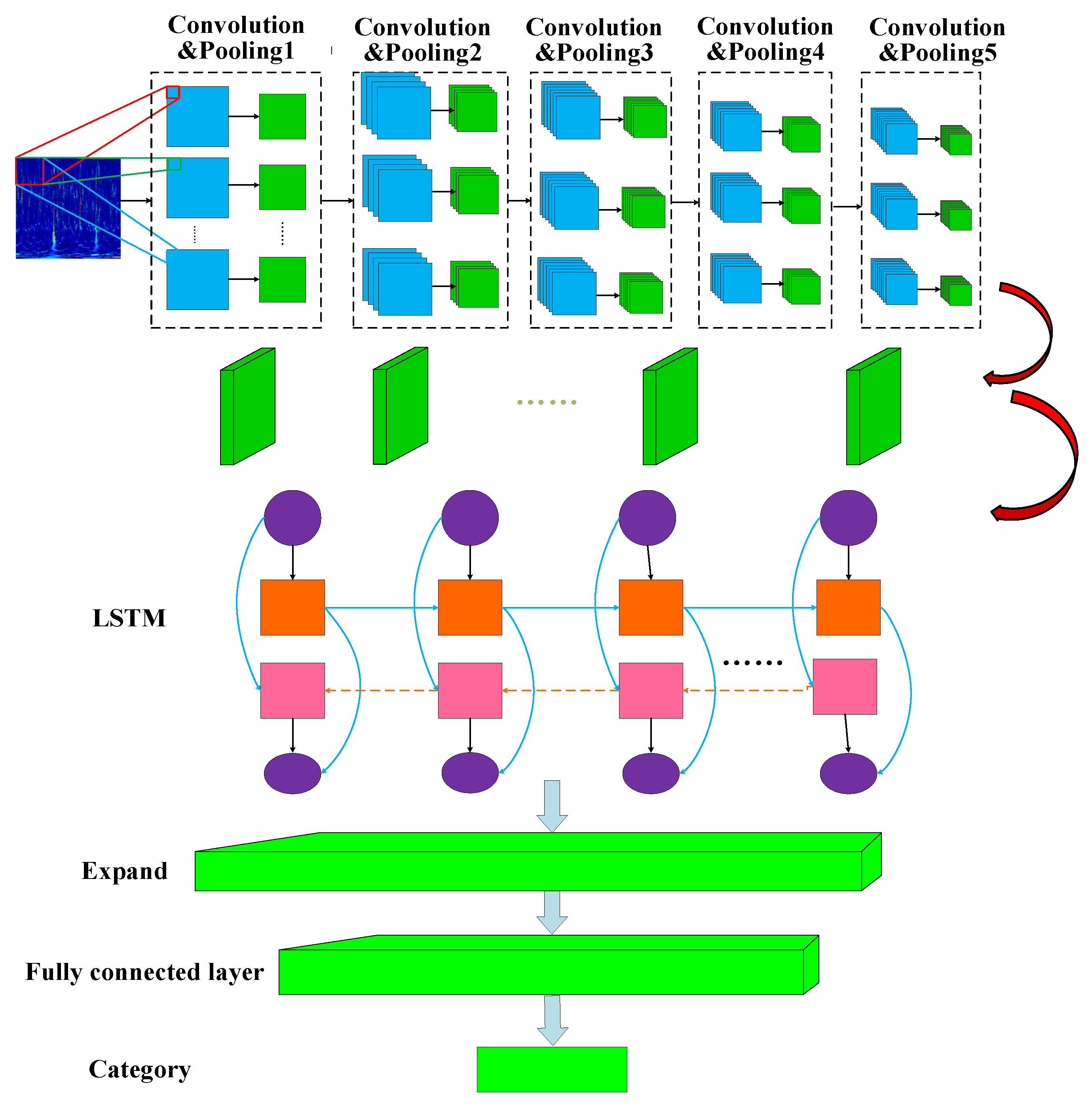
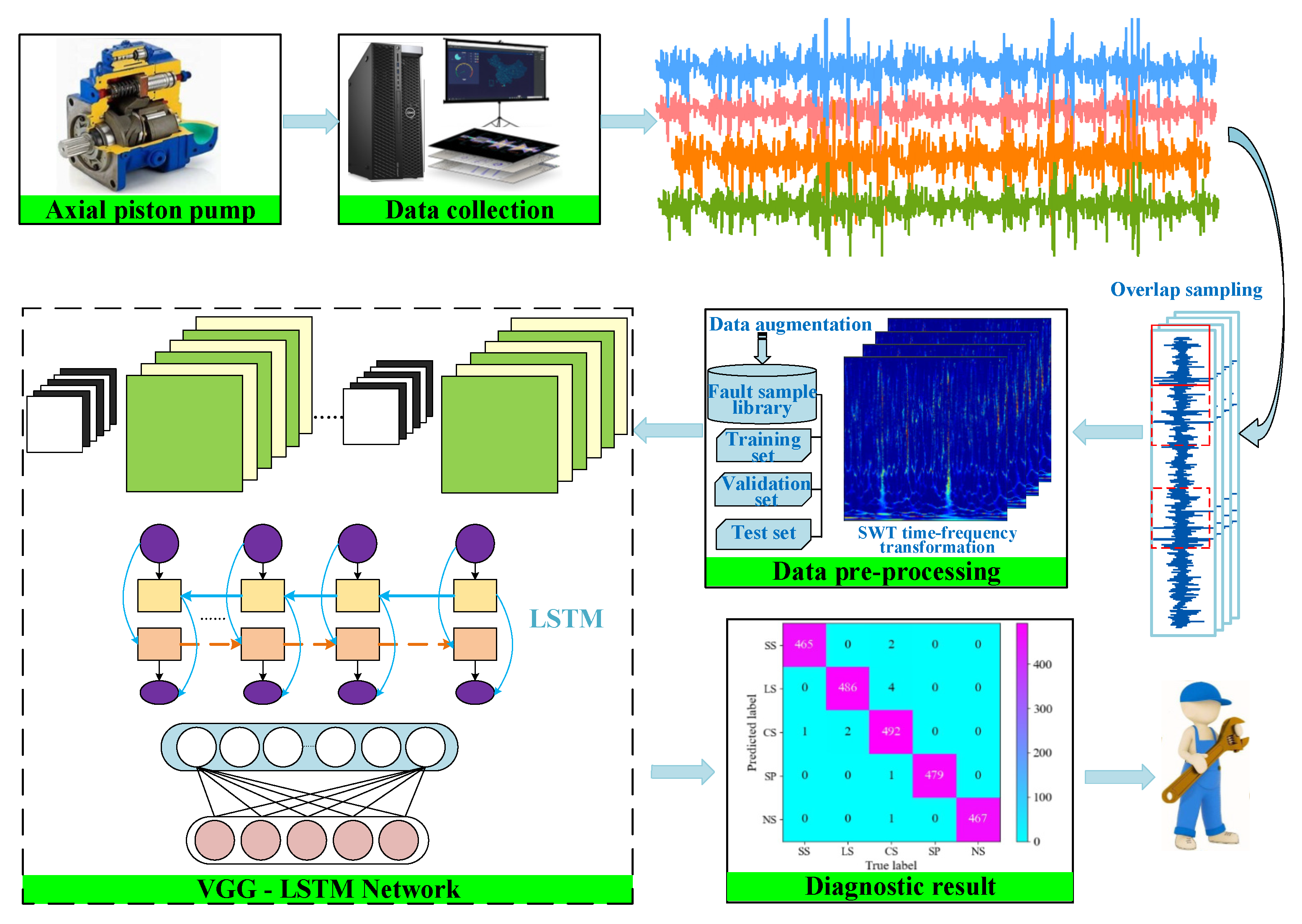
(3) A fault diagnosis model combining efficient feature extraction of VGG network and time series information learning of the LSTM model is proposed. Combined with the SWT time–frequency feature extraction method, intelligent fault diagnosis of a hydraulic axial piston pump is carried out, which enhances feature extraction ability, shortens calculation time, and improves fault diagnosis accuracy and efficiency.
The rest of the main structure is as follows. In
Section 1, the basic principle of the SWT, CNN, and LSTM algorithm is summarized. In
Section 2, the implementation process of the intelligent fault diagnosis method based on the improved VGG–LSTM fusion model is introduced.
Section 3 analyzes the collection of experimental data and the construction process of fault samples in detail.
Section 4 conducts comparison experiments and analyzes the main results. Finally, conclusions are summarized and the future research is prospected in
Section 5.
5. Results and Discussion
In order to verify the effectiveness of the proposed method, the performance of the traditional LSTM models, the classical CNN models (AlexNet, LeNet-5, VGG11) and the intelligent fault diagnosis model fused with SWT and VGG–LSTM are verified using the constructed sample library. The model parameters are set as follows: the number of images’ batch size is selected as 32, the number of iterative steps Epoch is preset as 70, the SGD algorithm is selected as the optimizer, Momentum is set as 0.9, cross-entropy is used as the loss function, and the learning rate is set as 0.001. The validation set verifies the model training effect and finetunes the model parameters based on the validation results. The deep learning framework is Pytorch (version 1.11.0+cu113), the development language is Python, and the hardware configuration of computer is Intel(R) Xeon(R) W-2235 CPU @ 3.80 GHz with 64 GB RAM.
5.1. Fault Diagnosis Based on Traditional LSTM Model
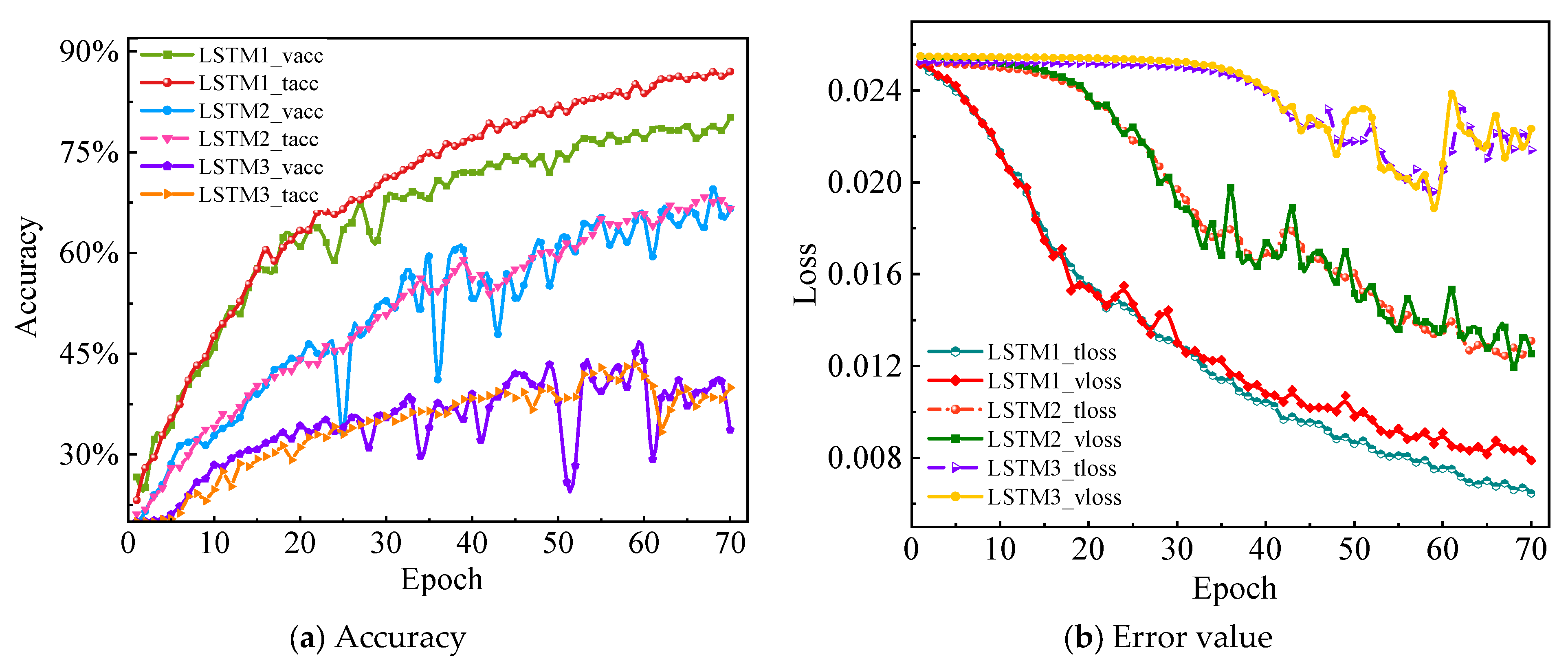
In order to test the performance of the model, the LSTM model (single-layer LSTM, double-layer LSTM, three-layer LSTM) is used for the fault diagnosis of the hydraulic axial piston pump on the same dataset. The diagnosis results are revealed in
Table 3. All model inputs are two-dimensional time–frequency diagrams, and the number of hidden nodes is set to 132 according to the complexity of the dataset. The comparison results of accuracy and error value of different models are shown in
Figure 14. Combined with
Table 3 and
Figure 14, it can be seen that the single-layer LSTM model has better synthesis performance compared with the two-layer LSTM or three-layer LSTM. The accuracy curve is relatively stable in the training process, with a maximum accuracy of 85% for the training set and 78% for the validation set. The loss curve converges faster, and the training and validation error curves can drop to smaller values more rapidly and steadily.
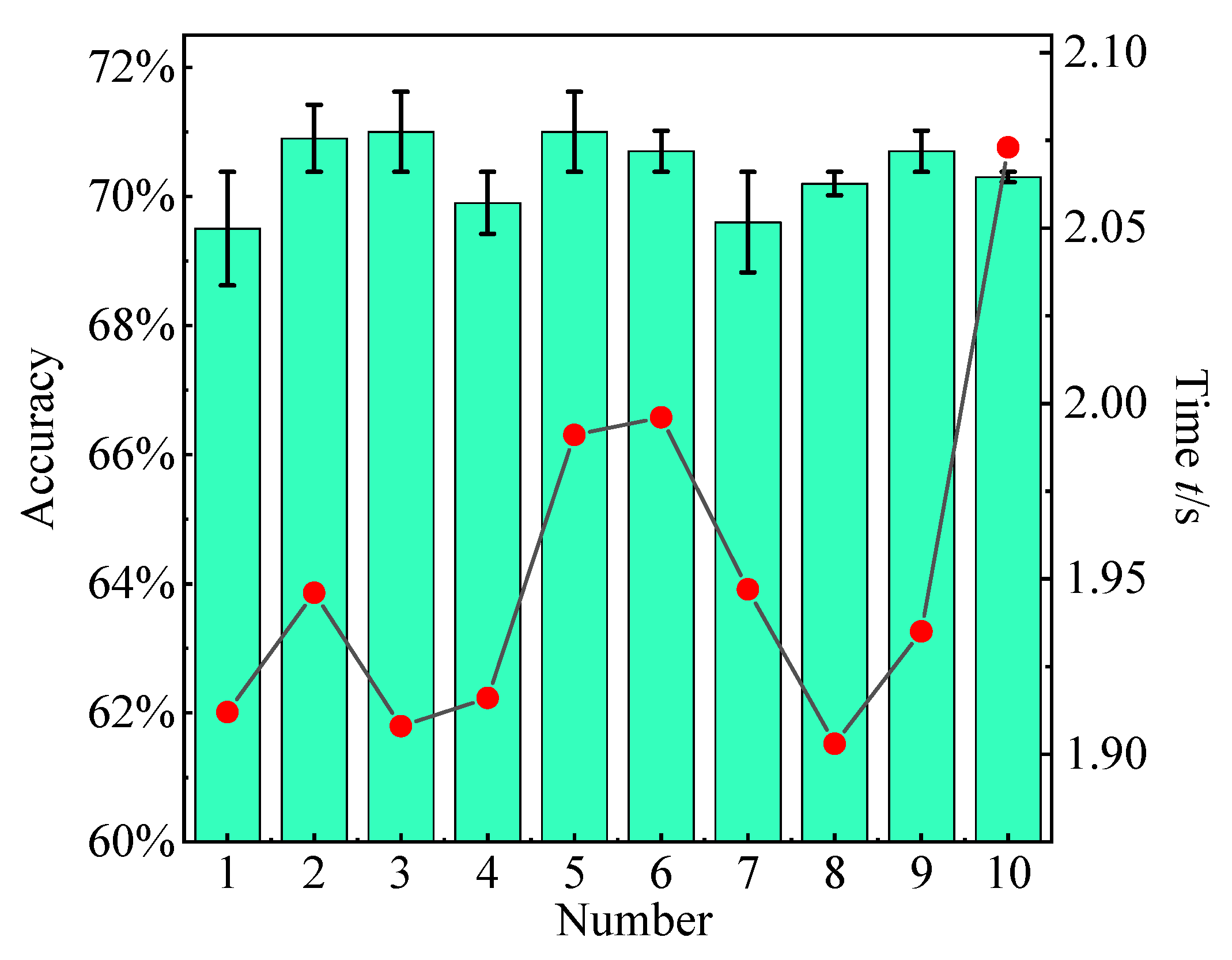
In order to verify the generalization of the single-layer LSTM model, the test set is used to test the performance of the trained model. Ten independent repeated tests are performed on the test set, and 20% of the samples are randomly selected from the dataset for each calculation. The test results are displayed in
Table 4 and
Figure 15. According to
Table 4 and
Figure 15, the average accuracy of ten independent repeated tests is 70.42%, and the standard deviation is 0.005.
5.2. Fault Diagnosis Based on Classical CNN Models
In order to better select the optimal model for comparative testing, some classic CNN models (LeNet-5, AlexNet, VGG11) are utilized for the fault diagnosis of the same dataset. The training samples and verification samples are input into the established classic CNN models for training, and the test samples are used to test the performance of the models.
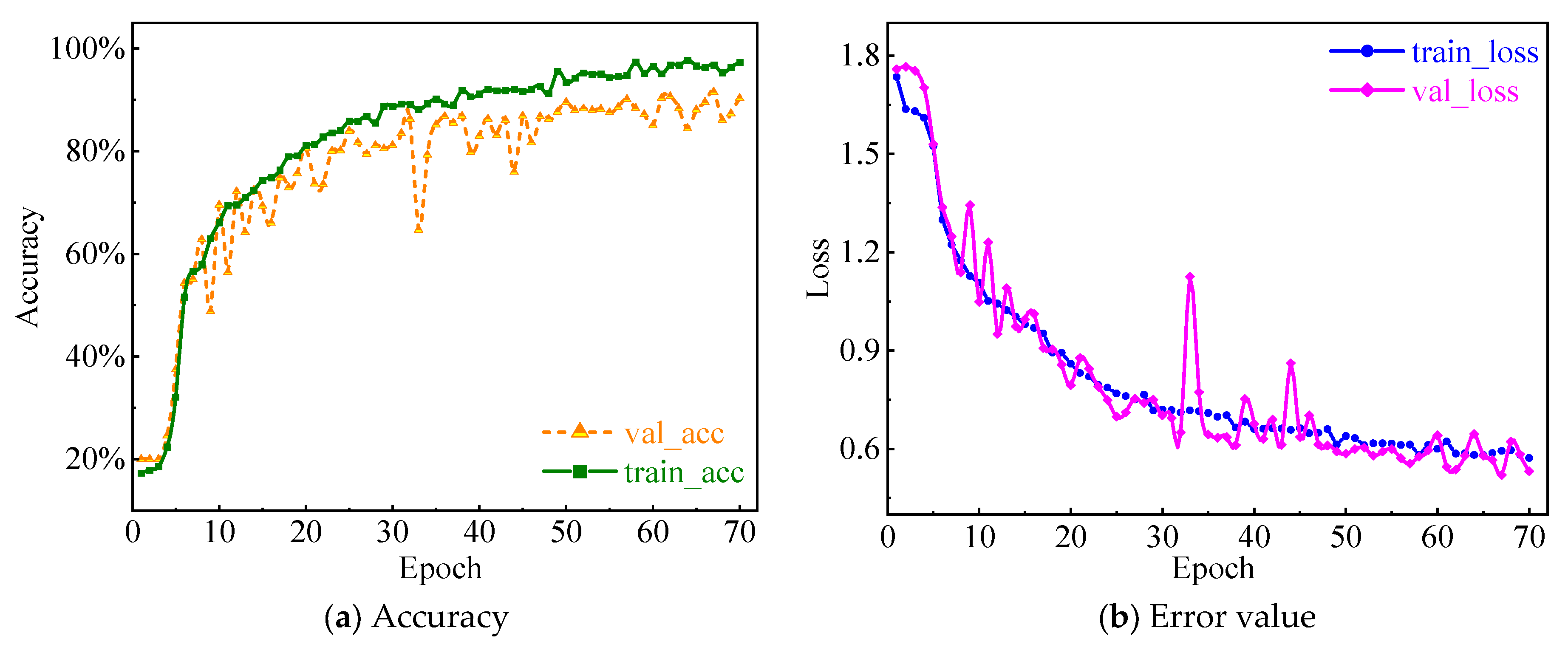
The variation curves of accuracy and error loss corresponding to the training results of the LeNet-5 model are presented in
Figure 16. As can be seen from
Figure 16a, with the increase in training time, the accuracy rate shows an overall upward trend. The accuracy rate of the training set can reach 90.33%, but the accuracy rate of the verification set is not stable and there are many oscillations. According to
Figure 16b, with the increase in training time, the error of the training set keeps decreasing and tends to be level, while the error of the validation set is relatively unstable with visible oscillations.
The variation curves of accuracy and error loss corresponding to the training results of the AlexNet model are displayed in
Figure 17. As can be seen from
Figure 17a, the accuracy curve increases and converges with the increase in training time. Moreover, the highest accuracy of the training set reaches 88.79%, and the highest accuracy of the validation set reaches 88.59%.
Figure 17b shows that the error curve decreases with the increase in training time and finally tends to smooth, with the lowest error of 0.5329 in the validation set and 0.5318 in the training set. The overall performance of the model is relatively stable and the oscillation is not evident.
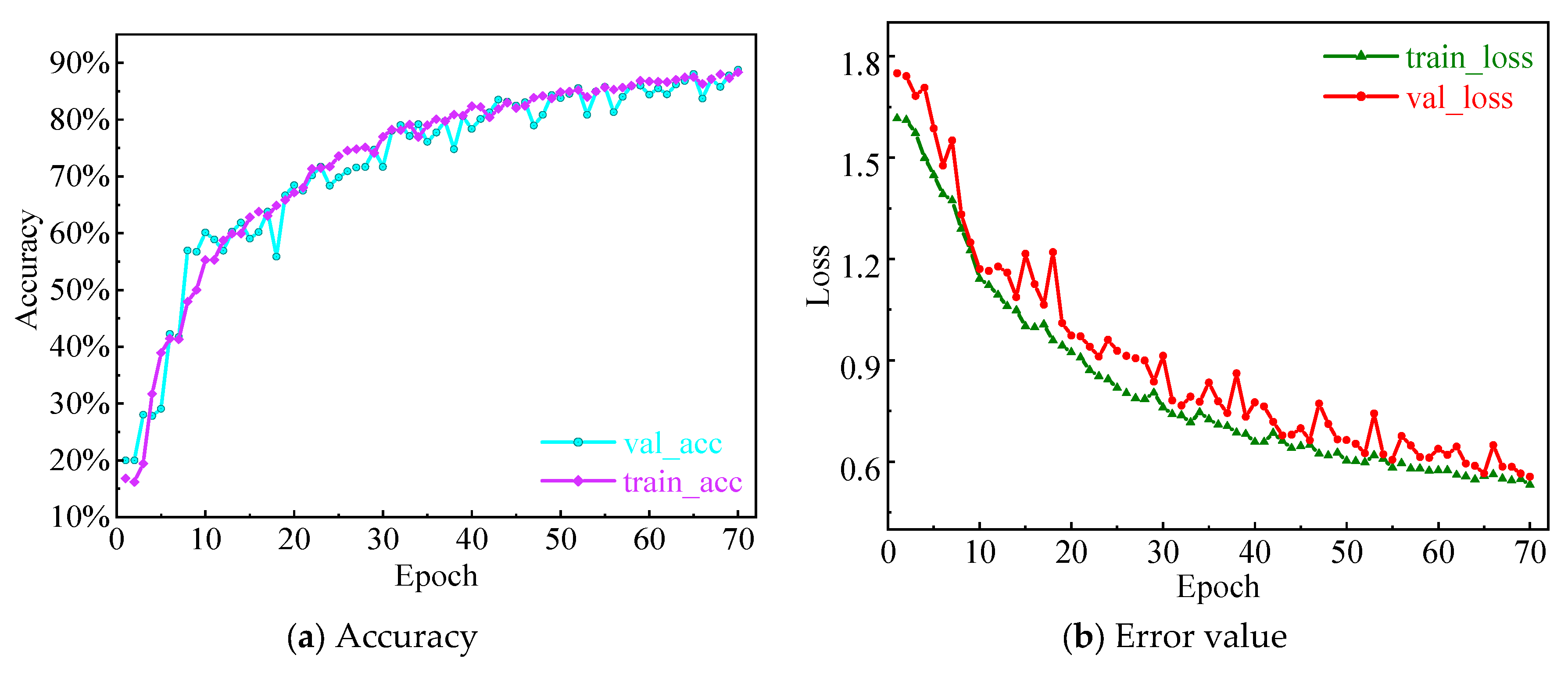
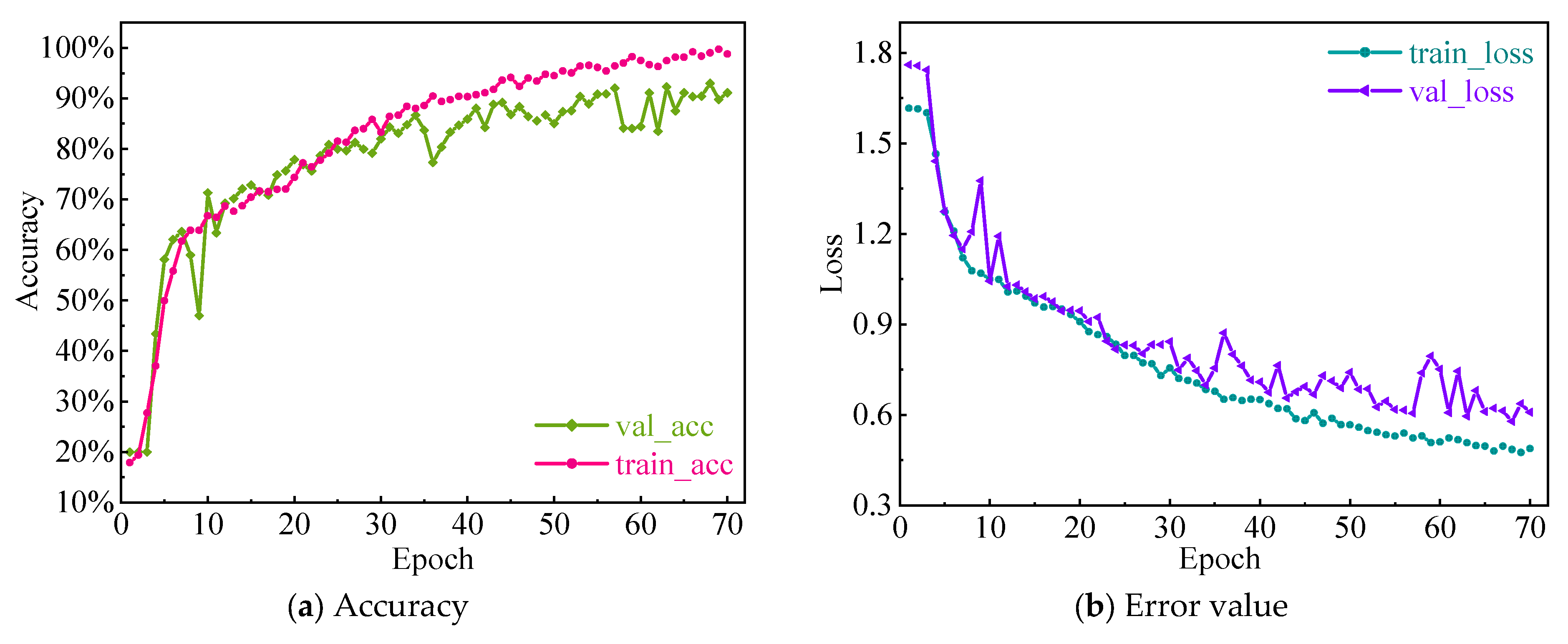
The variation curves of accuracy and error loss corresponding to the training results of the VGG11 model are demonstrated in
Figure 18. It can be seen that with the increase in training time, the accuracy of the training set increases gradually, and fluctuates in a small range, up to 92.12%. The accuracy of the validation set gradually increases as a whole, but the performance is not stable in the process of increasing, with an accuracy up to 90.42%. The error loss of the training set gradually decreases and smooths, and the error loss of the validation set gradually decreases but displays several oscillations.
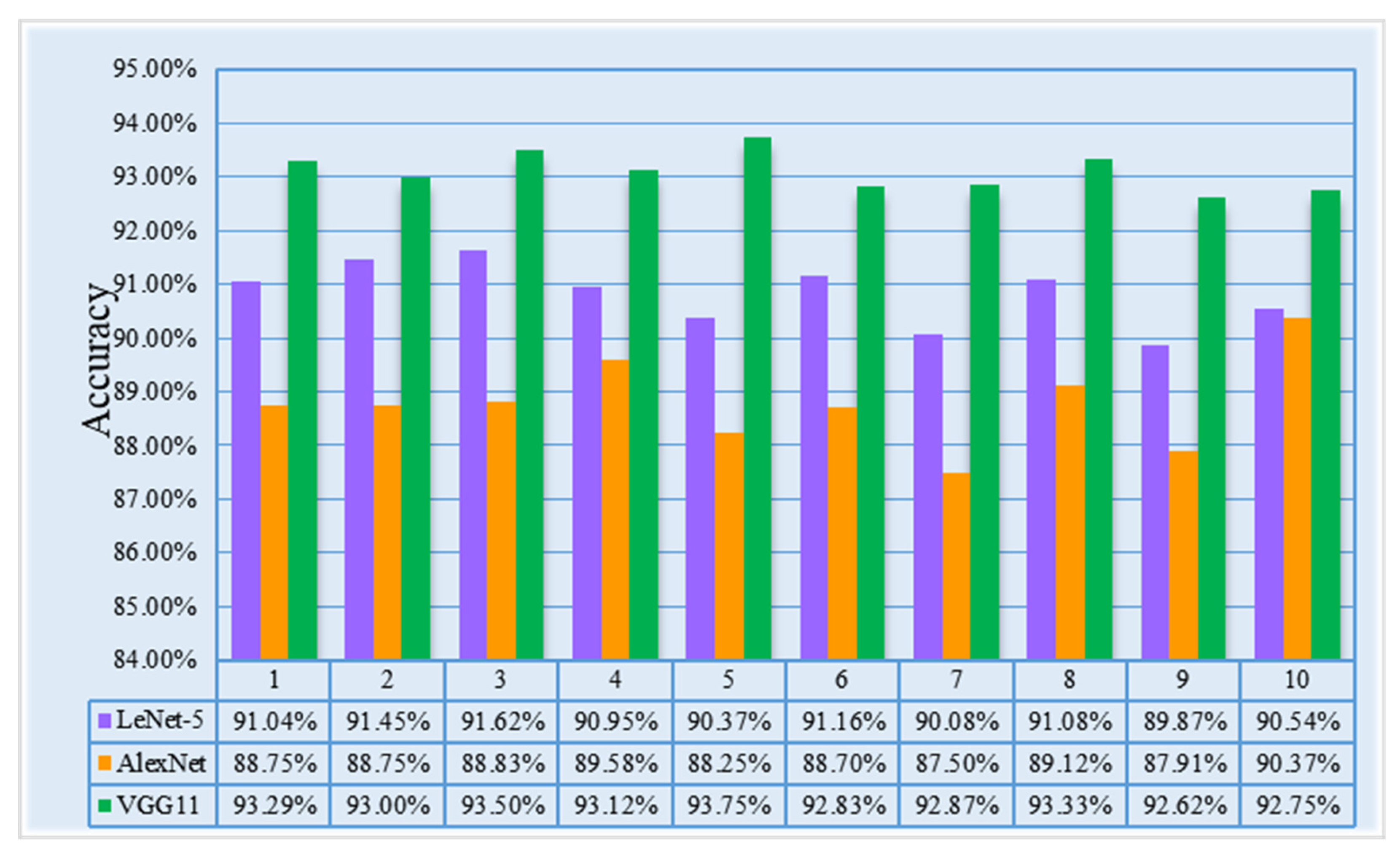
Keeping the hyperparameters of the three classical CNN models unchanged, ten independent repeated trials are performed on the test set. For each calculation, 20% of the samples are randomly selected from the dataset for testing. The test time of the ten repeated experiments of the three classical CNN models is shown in
Table 5, and the ten test results are described in
Figure 19. From
Table 5, the average test time of the LeNet-5 model is 0.2074 s, the average test time of the AlexNet model is 0.3736 s, and the average test time of the VGG11 model is 3.0375 s. It can be seen from
Figure 19 that the average value of ten test results of the LeNet-5 model is 90.80%, and the standard deviation is 0.0054. For the AlexNet model, the average value is 88.72% and the standard deviation is 0.0067. For the VGG11 model, the mean value is 93.07% and the standard deviation is 0.0057. Although the test time of the LeNet-5 model and the AlexNet model is shorter than that of the VGG11 model, the accuracy rate is not as high as that of the VGG11 model. By comparing the accuracy, test time, and standard deviation of the three classical CNN models, the overall performance of the VGG11 model is the best.
5.3. Intelligent Fault Diagnosis by Integrating SWT and VGG-LSTM
The training samples and validation samples are input into the established VGG–LSTM fusion model for training, and the model performance is tested by test samples. The optimizer is bound to an exponential decay learning rate controller, and the learning rate is set to 0.001. Each epoch learning rate is multiplied by 0.5 for each 30 steps of training. As the iteration continues, the learning rate is gradually updated, making the model more stable in the later stage of training.
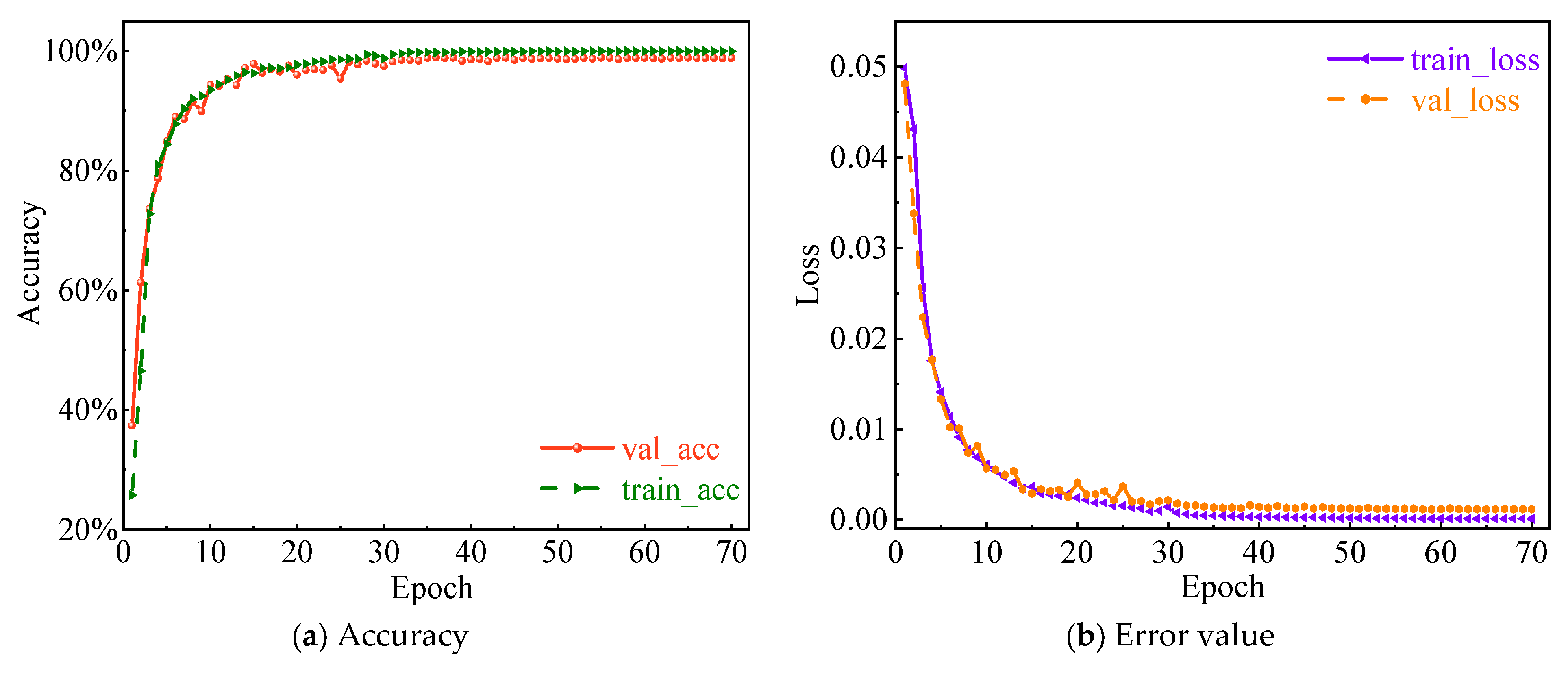
The curves of accuracy and error loss corresponding to the training results of the VGG–LSTM fusion model are presented in
Figure 20. In the first 10 trainings, the accuracy rate gradually increased. After 10 trainings, the accuracy curve tended to be stable. The training results of the training set could reach 100%, and the training results of the verification set could reach 99.83%. Similar to the accuracy curve, the error curve rapidly dropped to a stable value in the first 10 trainings. After 10 trainings, the training process is stable, and the error of the training set and the verification set approaches zero. In summary, the VGG–LSTM fusion model has higher identification accuracy and faster convergence speed in the training process.
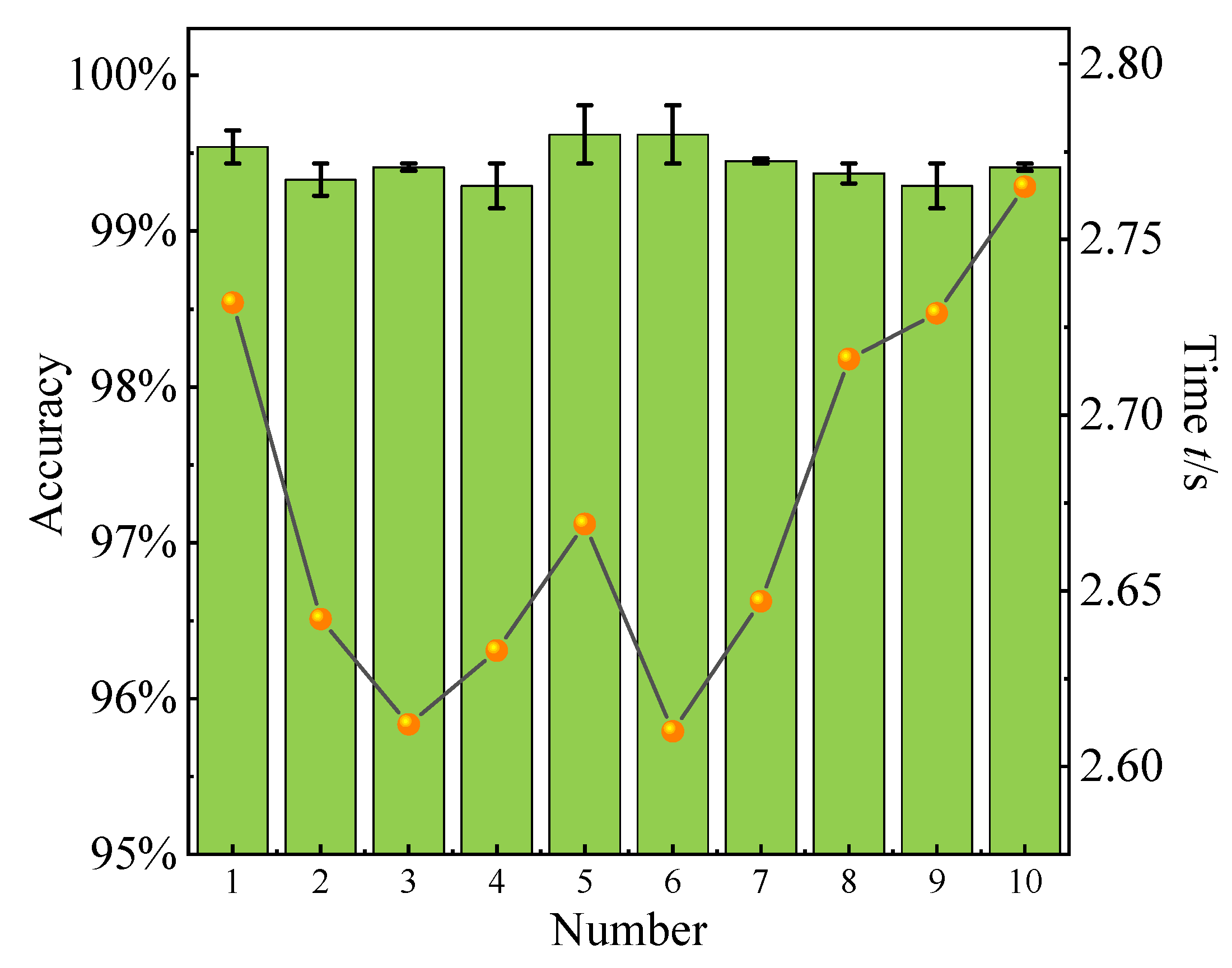
To demonstrate the generalization of the proposed method, 20% of the test set is randomly selected to test the performance of the trained model, and ten independent repeated tests are performed on the test set. The test results are displayed in
Table 6. Combined with
Figure 21, the results of ten tests are calculated, the average test accuracy is 99.43%, and the standard deviation of the test accuracy is 0.0011. The average test time is 2.6755 s, and the standard deviation of the test time is 0.0527.
5.4. Comparation Analysis of Different Models
In order to better verify the superiority of the constructed models, a comparison test of the above models is performed. From the perspective of accuracy, error, standard deviation, and time, the above models are comprehensively compared. The details of each model are described in
Table 7.
It can be seen from
Table 7, compared with different layers of LSTM models, that the training accuracy, verification accuracy, and average test accuracy of the single-layer LSTM model are the highest. Its training accuracy is 85.14%, the verification accuracy is 78.25%, and the average test accuracy is 70.38%. Compared with the three classical CNN models (LeNet-5, AlexNet, VGG11), the training accuracy, verification accuracy, and average test accuracy of the three models are all above 85%, among which the accuracy of LeNet-5 and VGG11 is higher, and the three accuracy rates are all above 90%, which can better identify the time–frequency diagram of vibration signals of the piston pump. For the VGG–LSTM fusion model, the training accuracy rate is 100%, the verification accuracy rate is 99.62%, and the average test accuracy rate is 99.43%. It has a strong recognition ability and can well identify the five typical states of the axial piston pump.
It can be seen by analyzing the error, the training error, and verification error of the VGG–LSTM fusion model are the lowest, approaching zero, 0.00011, and 0.00013, respectively. Compared with the three classical CNN models, the training error and verification error of the LeNet-5 model are 0.5724 and 0.5649, respectively, the training error and verification error of the AlexNet model are 0.53189 and 0.5329, respectively, and the training error and verification error of the VGG11 model are 0.48868 and 0.60265, respectively. Hence, the training error and verification error of the three classical CNN models are much higher than that of the VGG–LSTM fusion model. Compared with different layers of LSTM models, the training error and verification error of the single-layer LSTM model are 0.00645 and 0.00788, respectively, the training error and verification error of the double-layer LSTM model are 0.01309 and 0.01253, respectively, and the training error and verification error of the three-layer LSTM model are 0.02140 and 0.02233, respectively. Although the error of the LSTM model with different layers is much smaller than that of three classical CNN models, it is still much higher than that of the VGG–LSTM model, and the accuracy of the LSTM model is low.
By analyzing the standard deviation of ten independent repeated tests, the test standard error of the VGG–LSTM fusion model is the lowest, approaching zero, which is 0.0011. Comparing the three classical CNN models, the standard deviations of LeNet-5, AlexNet, and VGG11 are 0.0054, 0.0081, and 0.0035, respectively. The standard deviations of the single-layer LSTM model, two-layer LSTM model, and three-layer LSTM model are 0.0056, 0.0076, and 0.0071, respectively. The results of ten repeated tests show that the VGG–LSTM fusion model has the lowest standard deviation, which indicates that the fusion model is more robust.
From the perspective of time, comparing the average training time, the average training time of LSTM models with different layers is within 20 s, and the average training time of other models is more than 20 s, with the longest training time reaching 80.458 s. The model training process consumes a longer time, among which the training time of the VGG–LSTM fusion model is 41.458 s. Comparing the average validation time, the time of the LSTM models with three different layers are 5.373 s, 5.691 s, and 5.627 s. The average training times of the three classical CNN models are 17.899 s, 17.852 s, and 23.130 s. Additionally, the average validation time of the VGG–LSTM fusion model is 4.771 s. From the average test time of the ten tests, the times of the LSTM models with three different layers are 1.952 s, 2.091 s, and 2.167 s. The average test time of the three classical CNN models are 0.207 s, 0.373 s, and 3.037 s. Additionally, the average test time of the VGG–LSTM fusion model is 2.675 s.
In summary, the VGG–LSTM fusion model has the highest accuracy and the lowest training and verification errors. The average test accuracy of the ten tests is the highest, the standard deviation of the test is the smallest, and the average test time is relatively short. Hence, the comprehensive performance of the VGG–LSTM fusion model is the best, which can effectively achieve the accurate identification of typical faults of an axial piston pump.
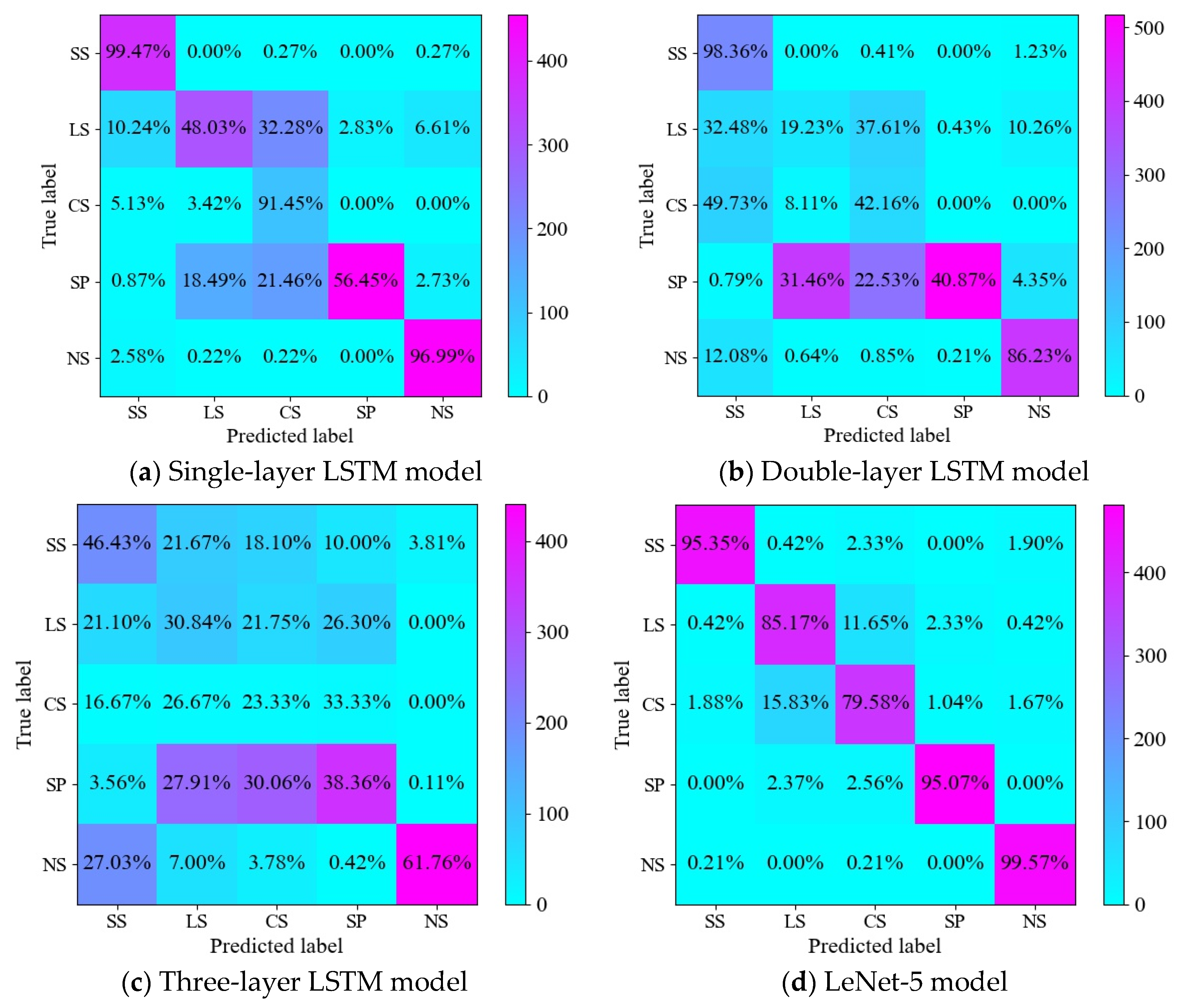
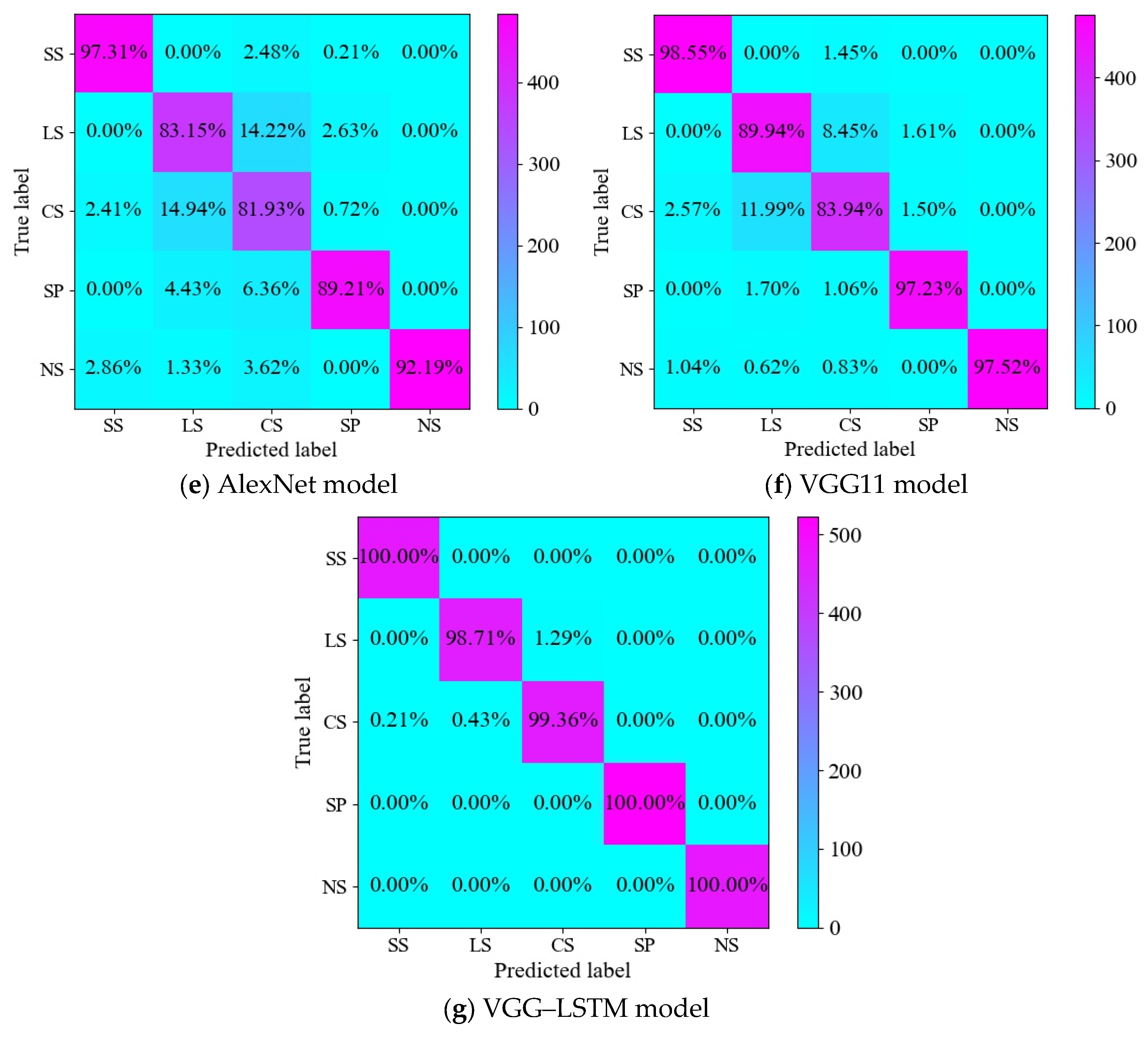
The confusion matrix of each model is generated by reloading the weight file corresponding to the optimal recognition rate, as shown in
Figure 22. It can be seen from the confusion matrixes that the LSTM models have low accuracy in identifying the faults of the axial piston pump. The four models of LeNet-5, AlexNet, VGG11, and VGG–LSTM can accurately identify the three states such as slipper wear, swash plate wear, and normal state. The VGG–LSTM model has the highest accuracy, and the recognition accuracy for the above three typical states is 100%. For another two fault states such as loose slipper and center spring failure, several models have some misclassification phenomenon. Commendably, the VGG–LSTM model has the lowest misclassification rate, only 1.29% of loose slipper failures are misidentified as center spring failures, and 0.43% of center spring failures are misidentified as loose slipper failures.
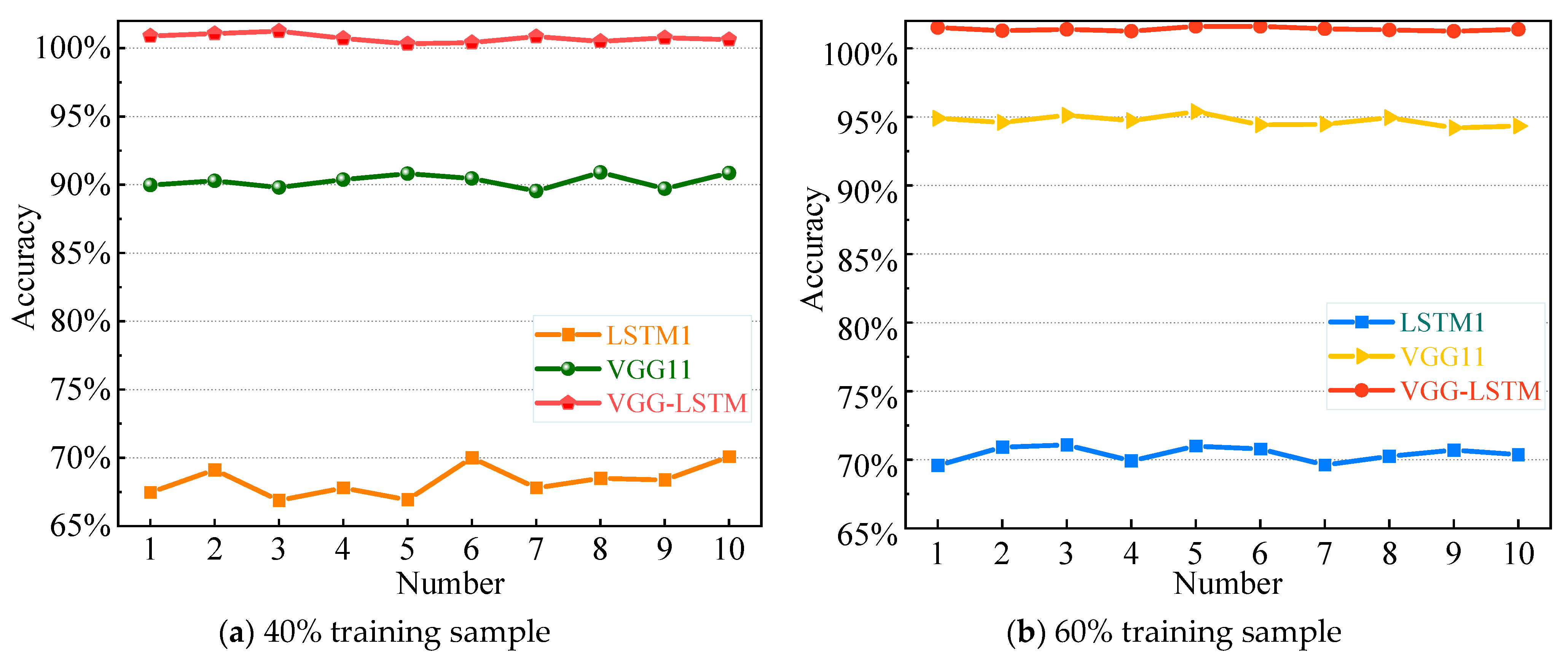
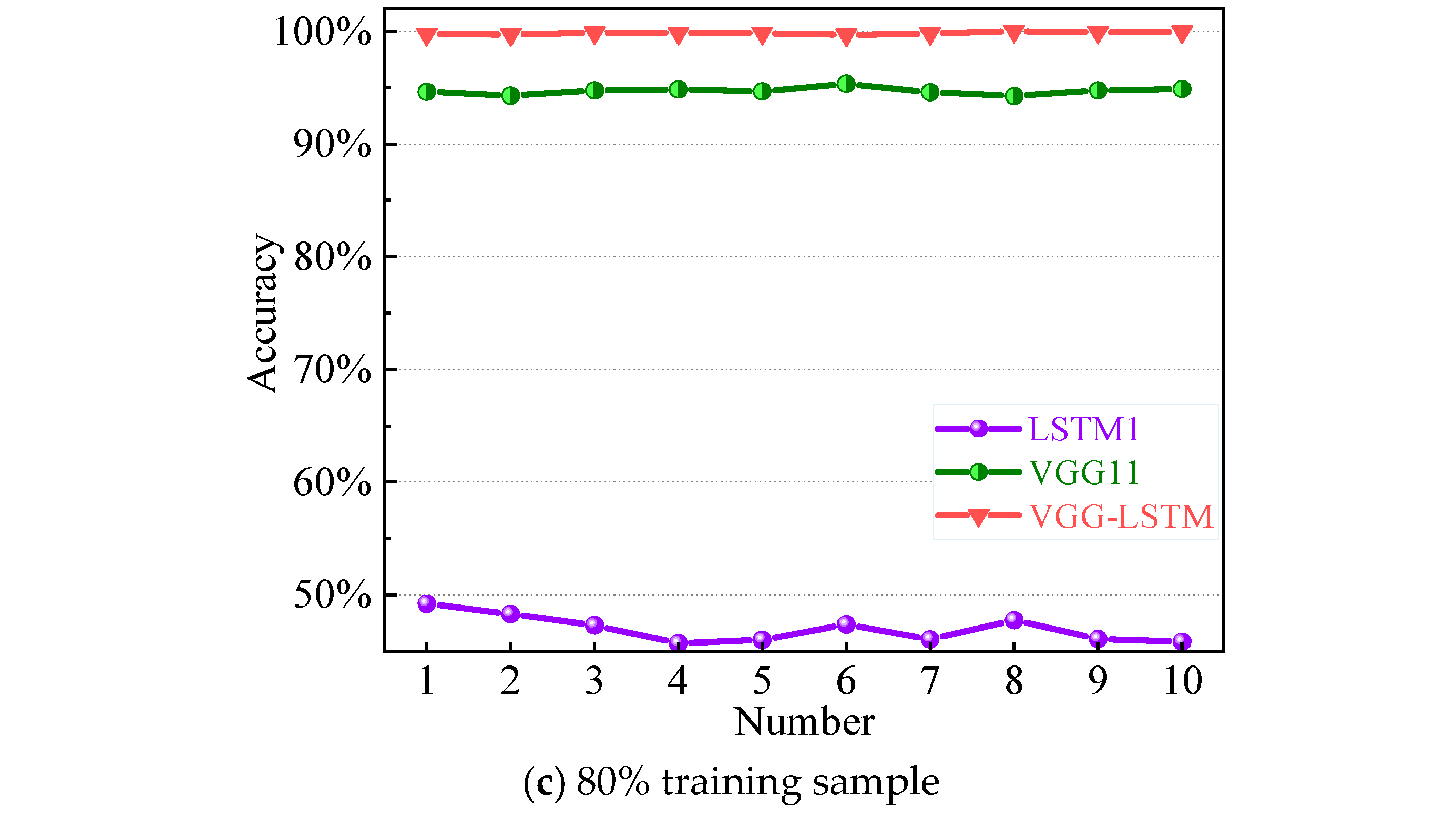
Then, the VGG–LSTM fusion model is further cross-validated with the two better-performing models, including LSTM and VGG11, by setting different training ratios of 40% (4:3:3), 60% (6:2:2), and 80% (8:1:1). The average diagnosis results of the three models under different training ratios are displayed in
Table 8, and the comparison results of ten independent repeated tests are shown in
Figure 23.
As can be seen from
Table 8, compared with single-layer LSTM and VGG11, the VGG–LSTM fusion model has the highest accuracy rate of fault diagnosis at different training ratios. In terms of program running time, the verification time of the VGG–LSTM fusion model is much faster than that of VGG11. Through
Figure 23, it is evident that the accuracy of the proposed VGG–LSTM fusion model is higher than that of the VGG11 model and the single-layer LSTM model, and the results of ten independent tests are also more stable compared to the above two models.
6. Conclusions
To achieve an intelligent fault diagnosis of a hydraulic piston pump, a combined model based on SWT and VGG–LSTM is proposed. The correlation in the original vibration signal is carefully explored, and the diagnosis accuracy of the common faults of a hydraulic axial piston pump is enhanced by integrating the translation invariance of a CNN in time–space and the memory capacity of an RNN. The following findings are obtained:
(1) The SWT method is used for the establishment of a data sample library and transforms 1D vibration signals into 2D time–frequency maps, giving a good input of a diagnostic model. The proposed VGG–LSTM diagnosis model combines the advantages of the single-layer LSTM network model and the VGG11 network model, and has great stability. Meanwhile, it can resolve the long training time of the VGG11 model and the low diagnostic accuracy of the LSTM model. It provides a novel approach for the intelligent fault diagnosis of a hydraulic axial piston pump.
(2) Some classic methods are employed to identify the five typical states by using the measured vibration signals of a hydraulic axial piston pump. The recognition accuracy of the single-layer LSTM model is 85.14%, and the recognition accuracy of the standard VGG11 model is 92.12%. The proposed VGG–LSTM fusion model is rebuilt by integrating the advantages of the VGG11 model and the single-layer LSTM model. The layered learning rate is configured to increase the recognition accuracy of the fusion model up to 100%. The VGG–LSTM fusion model has higher fault recognition accuracy when compared to some classic models such as single-layer LSTM, two-layer LSTM, three-layer LSTM, LeNet-5, AlexNet, and VGG11. It has lower training and validation errors, faster learning and training speeds, and a shorter testing time.
(3) The failure data of a hydraulic axial piston pump are time series data with temporality. The VGG–LSTM fusion model reduces the diagnosis time by utilizing the potent timing processing capabilities of LSTM. The training time of the fusion model is 15.87 s faster than that of the VGG11 model under identical operating conditions. However, when the single-layer LSTM and VGG11 models are combined, the ability of the LSTM model to mine features is improved, while the VGG11 model’s reliance on the number of data samples is lessened. The effective information buried in the temporal data is mined in conjunction with the prospective feature extraction capability of the VGG11 model, the diagnostic accuracy and effectiveness of the common faults of the hydraulic axial piston pump are improved.
The approach can further be explored as a method for the intelligent fault diagnosis of other rotating machinery such as motors, gears, bearings, and so on. The following work can be explored in the future:
(1) The effect of the VGG–LSTM model on fault identification of hydraulic axial piston pumps under variable speed.
(2) The number of layers of the VGG–LSTM fusion model can be reduced so as to further optimize the model.
(3) The influence of different sampling frequencies on the results of the fusion diagnosis method.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}