

Coupled Vibration Analysis of Ice–Wind–Vehicle–Bridge Interaction System
Abstract
:1. Introduction
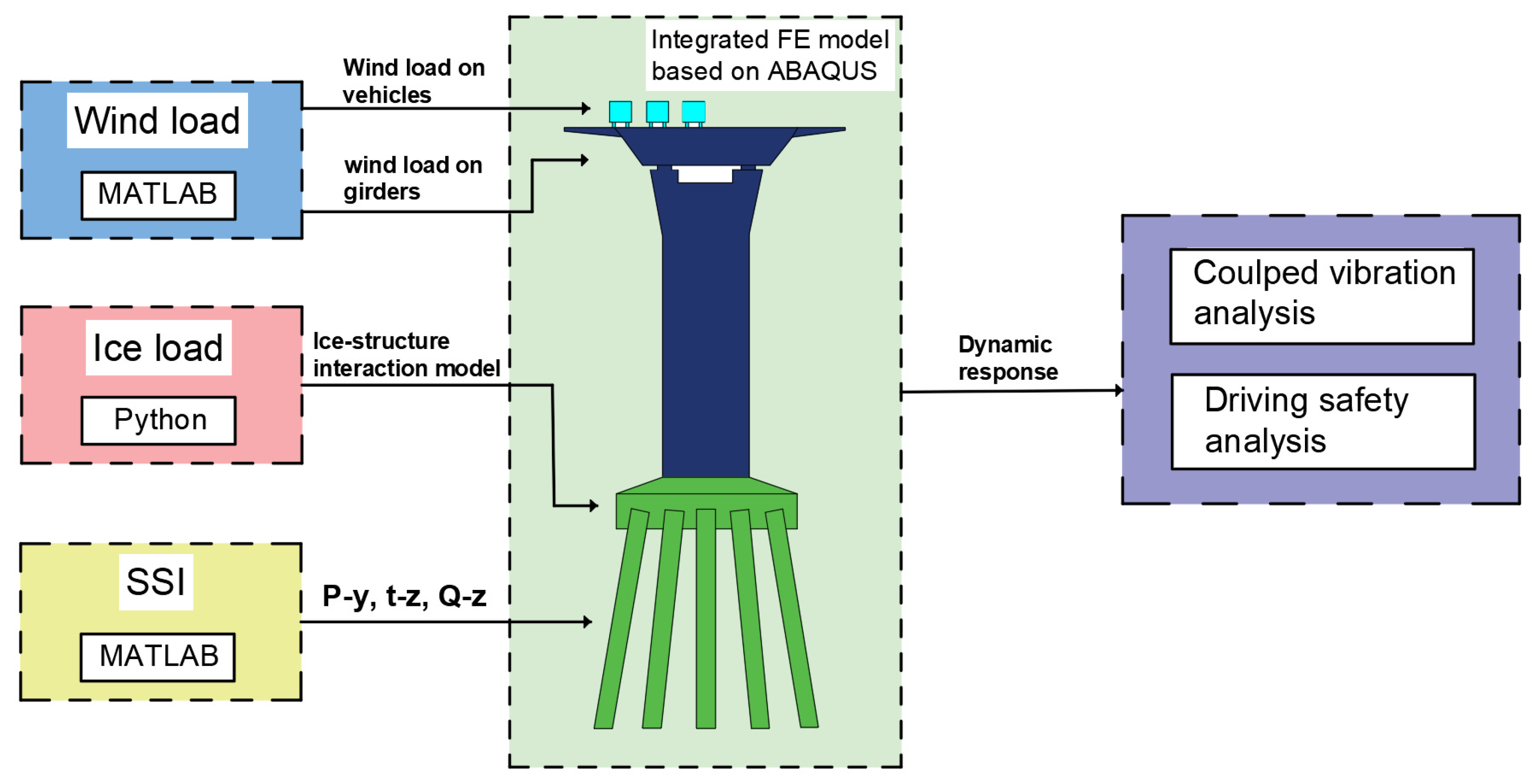
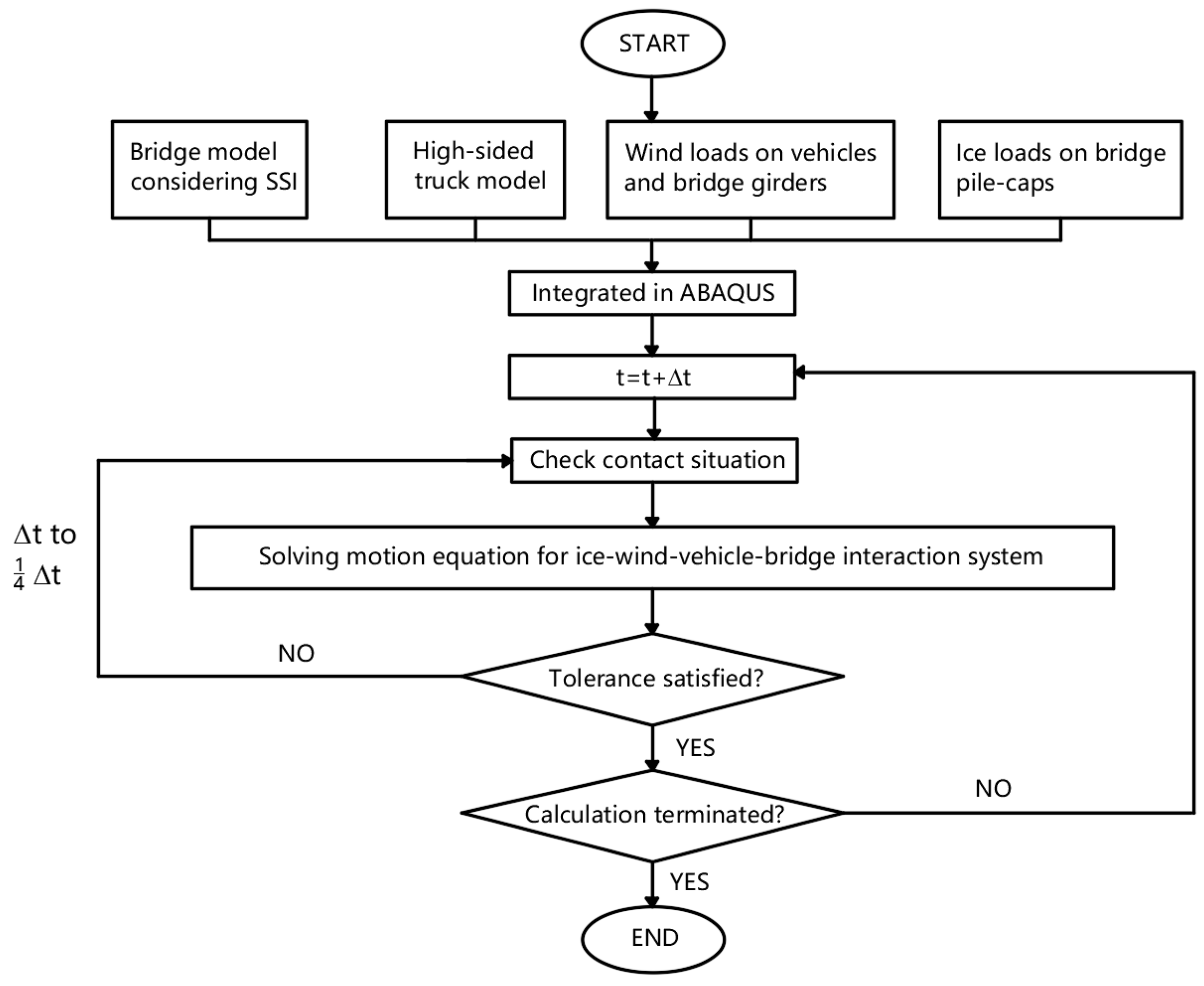
2. Analysis Framework of Ice–Wind–Vehicle–Bridge Interaction System
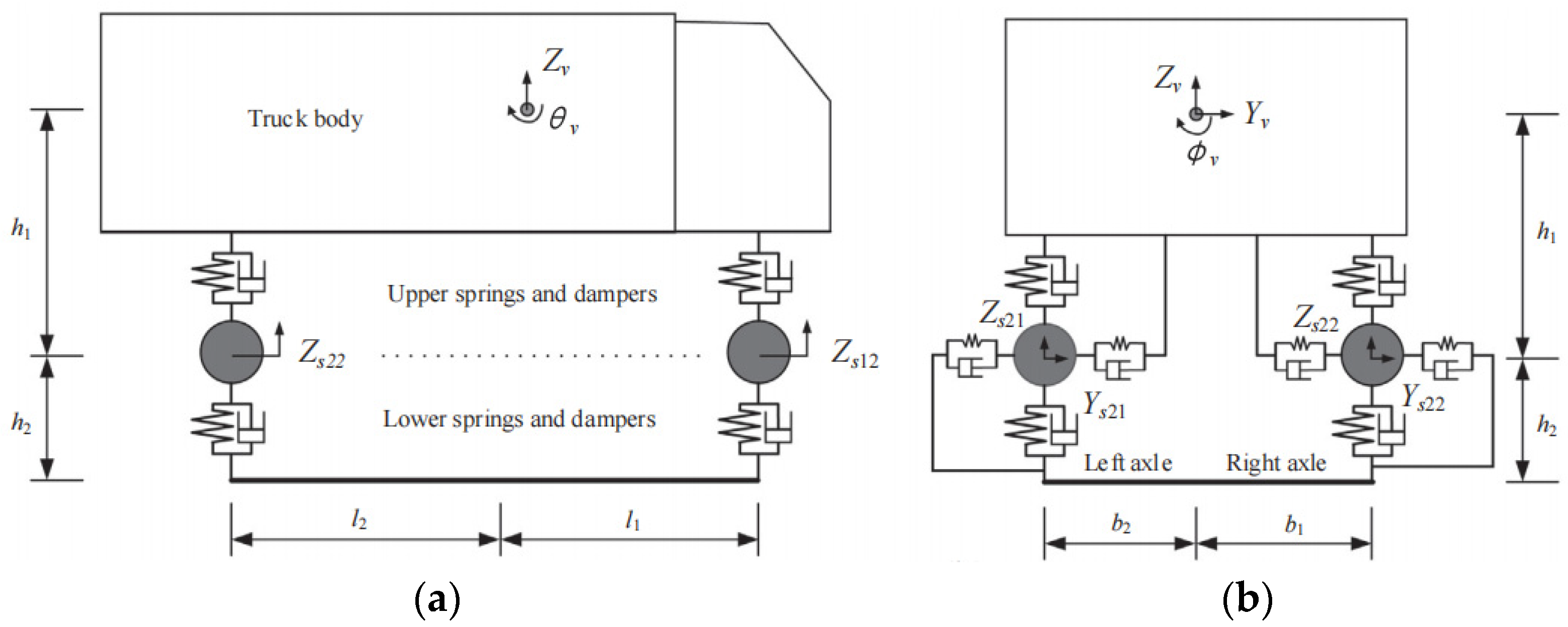
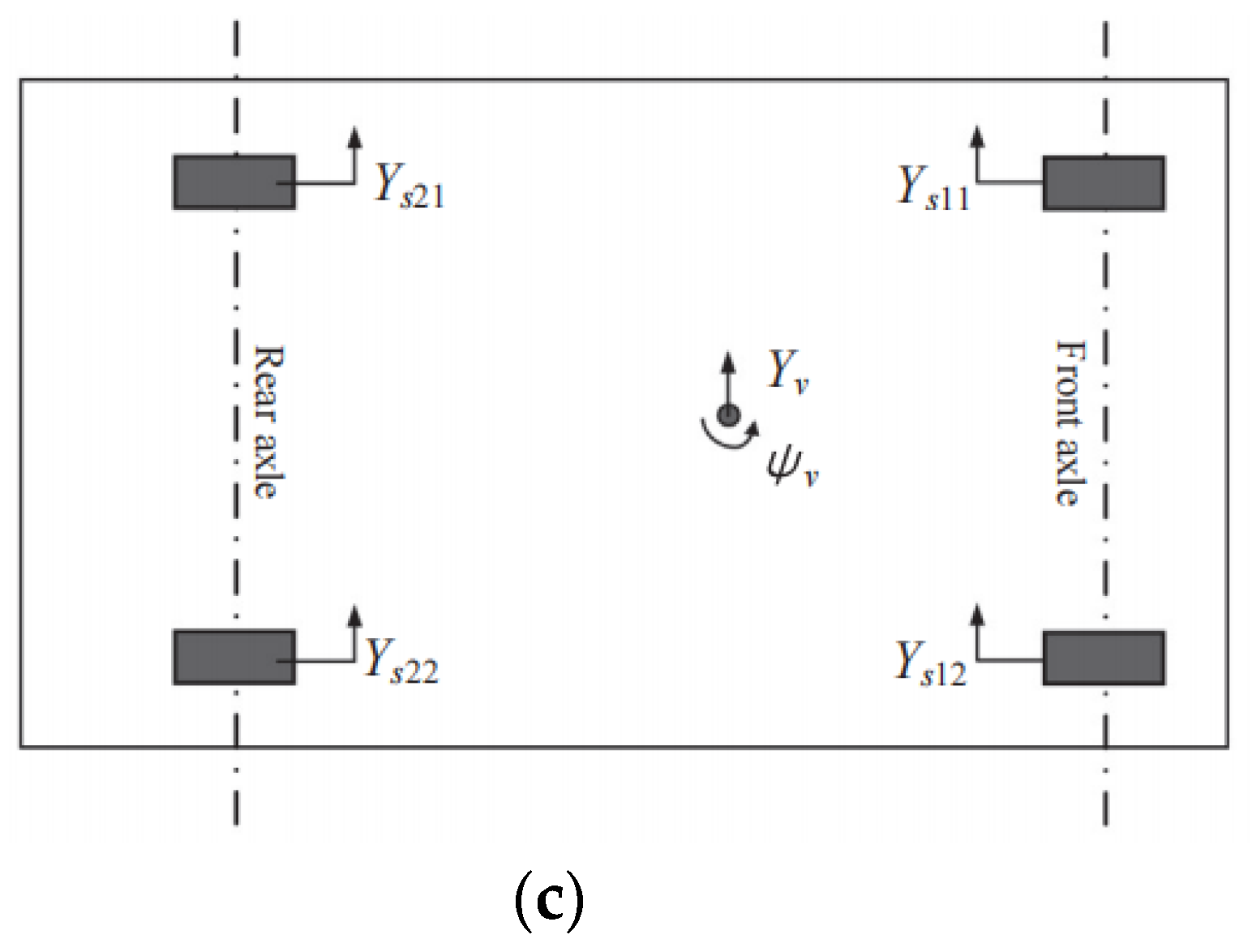
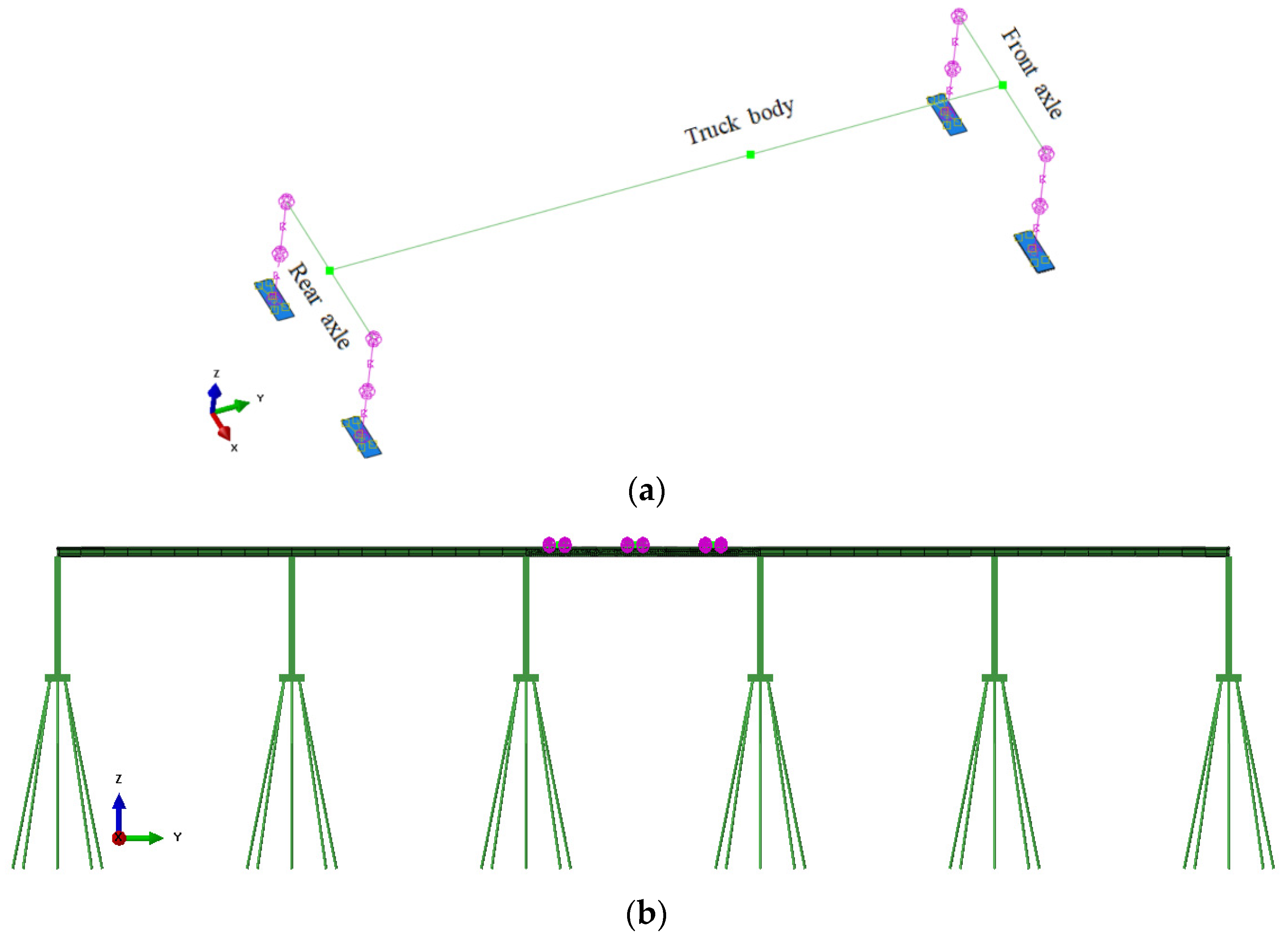
2.1. Modeling of the High-Sided Road Truck
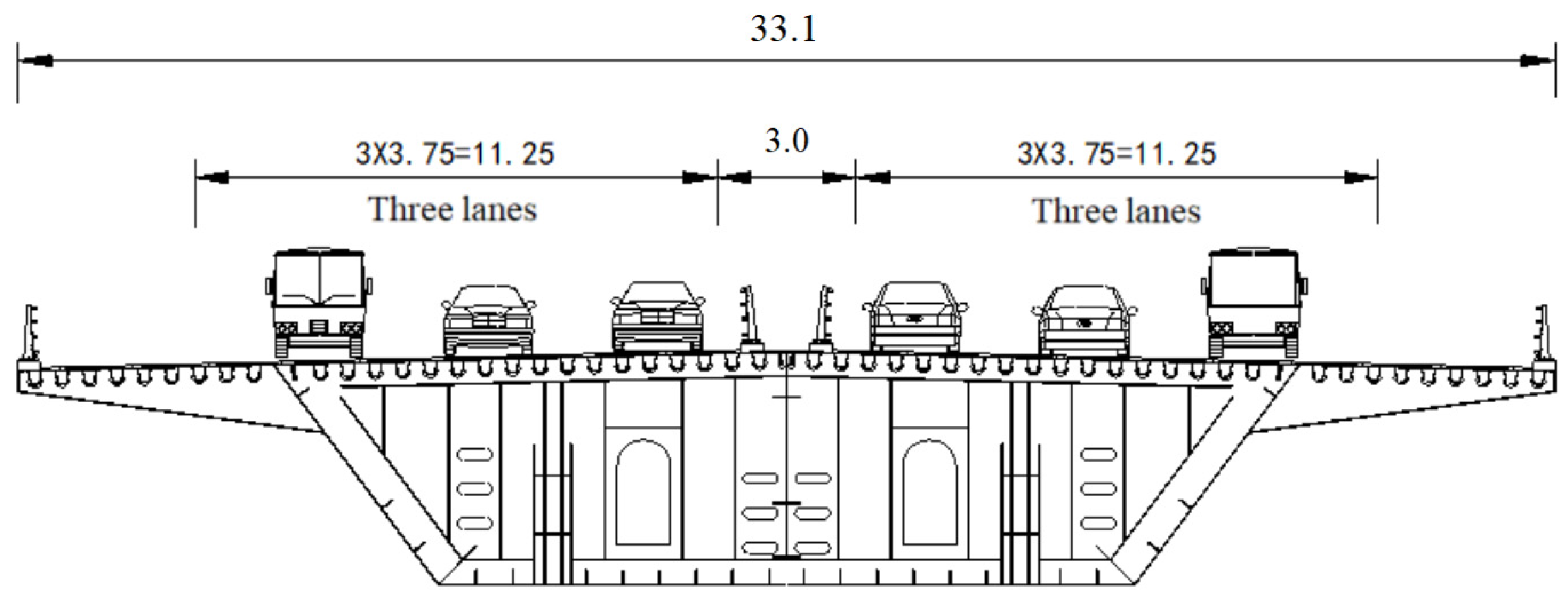
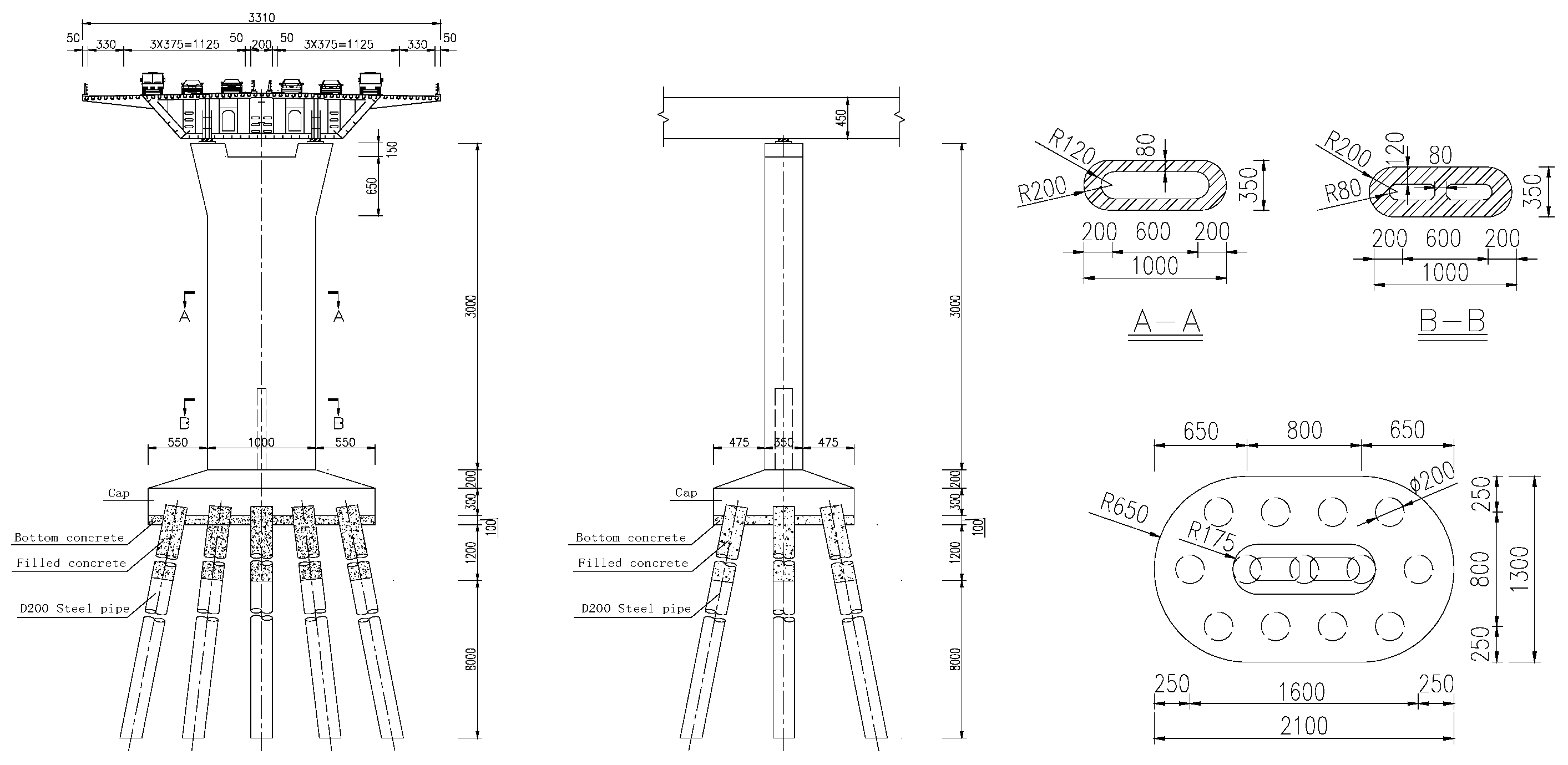
2.2. Modeling of the Sea-Crossing Bridge
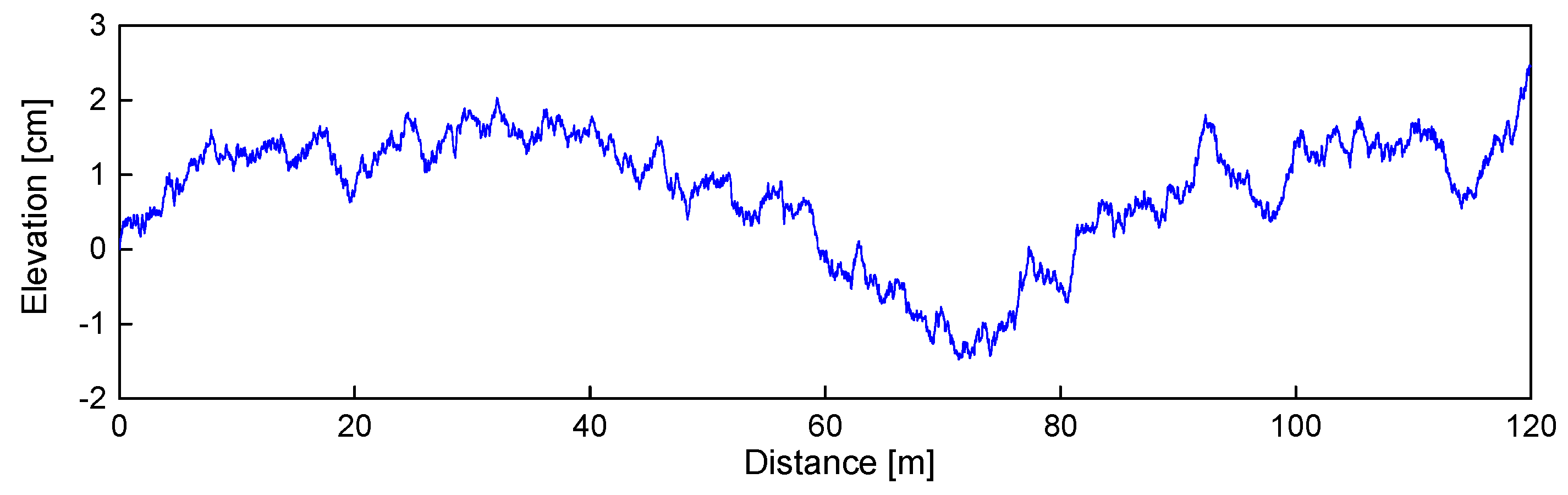
2.3. Modeling of Pavement Roughness
2.4. Modeling of the Vehicle-Bridge Contact Behavior
2.5. Coupled Dynamic Equation of Ice–Wind–Vehicle–Bridge Interaction System
3. External Excitation Loads
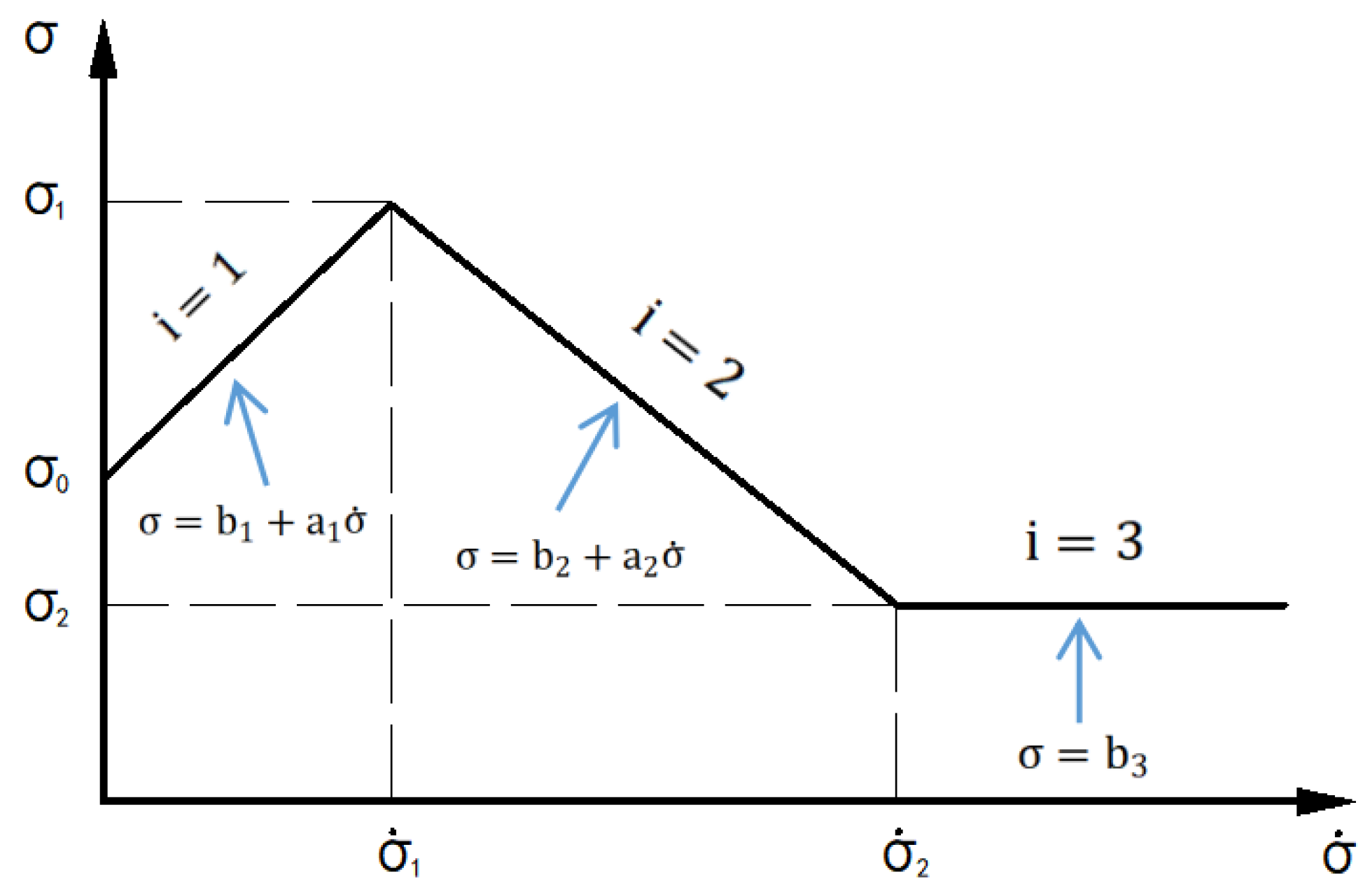
3.1. Ice-Induced Vibration Model
3.1.1. Negative Damping Effect
3.1.2. Linearized Model of Ice–Structure Interaction
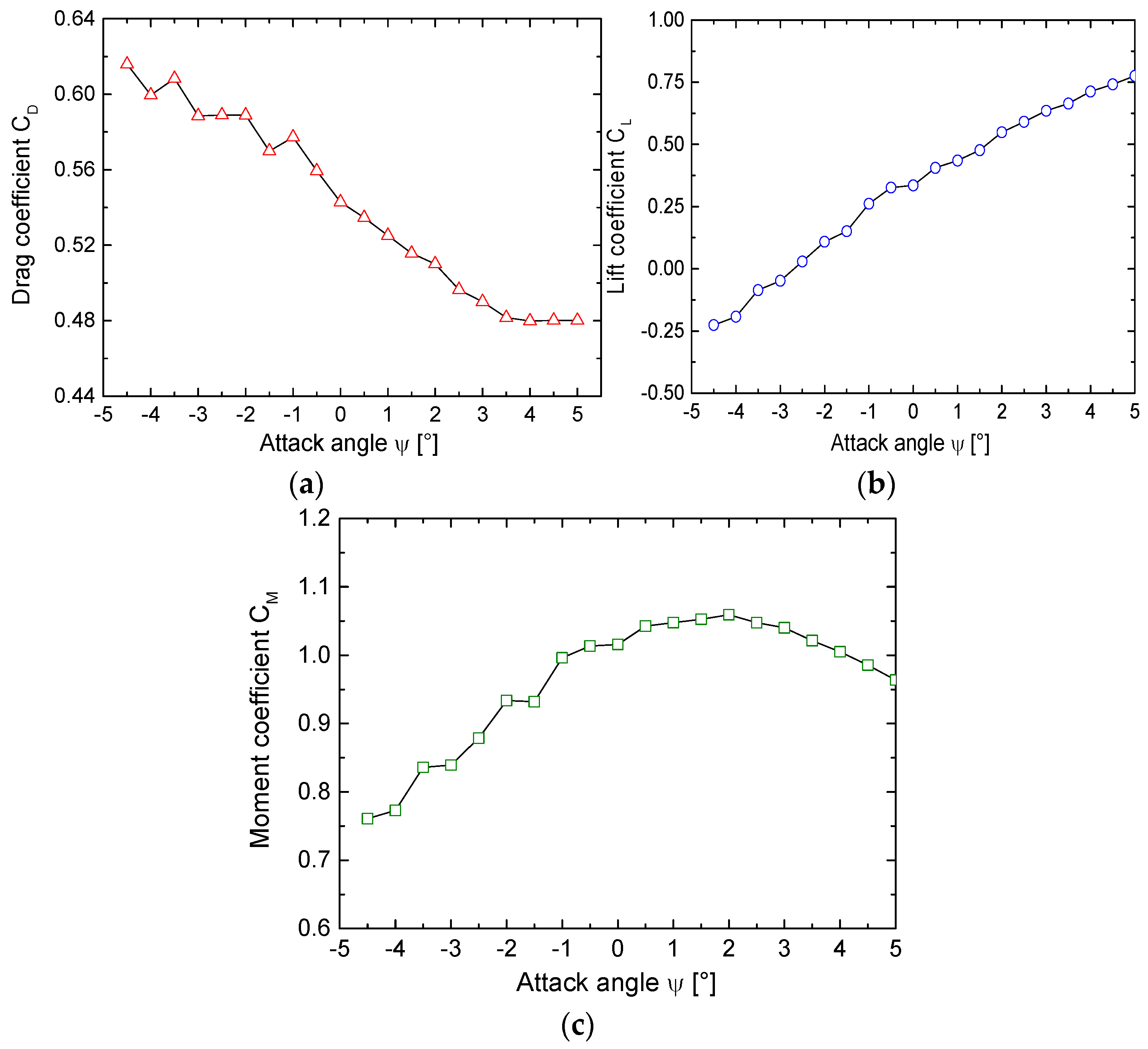
3.2. Wind Load
3.2.1. Wind Load on Bridges
3.2.2. Wind Load on Vehicles
4. Dynamic Responses Analysis and Sideslip Risk Assessment
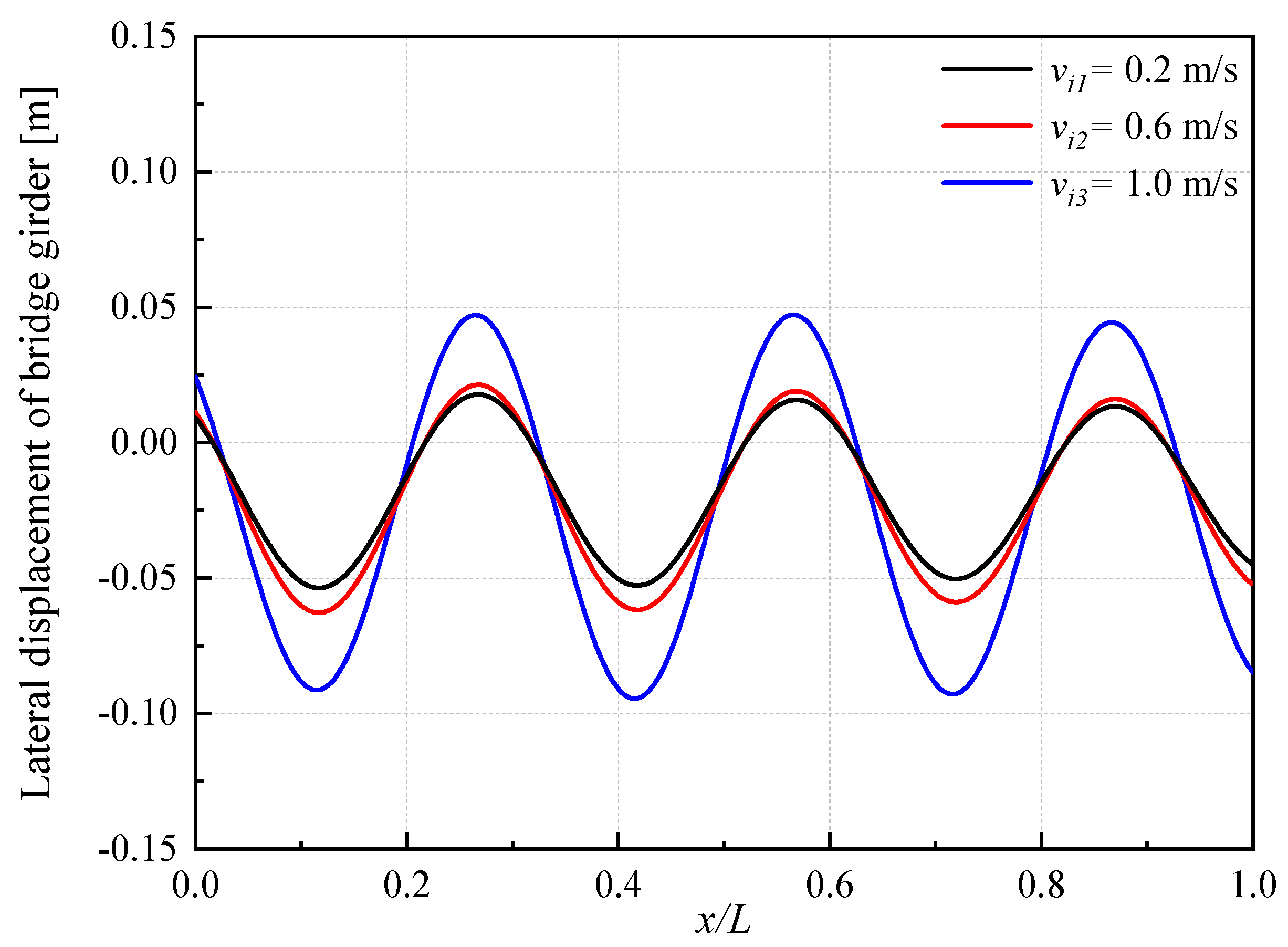
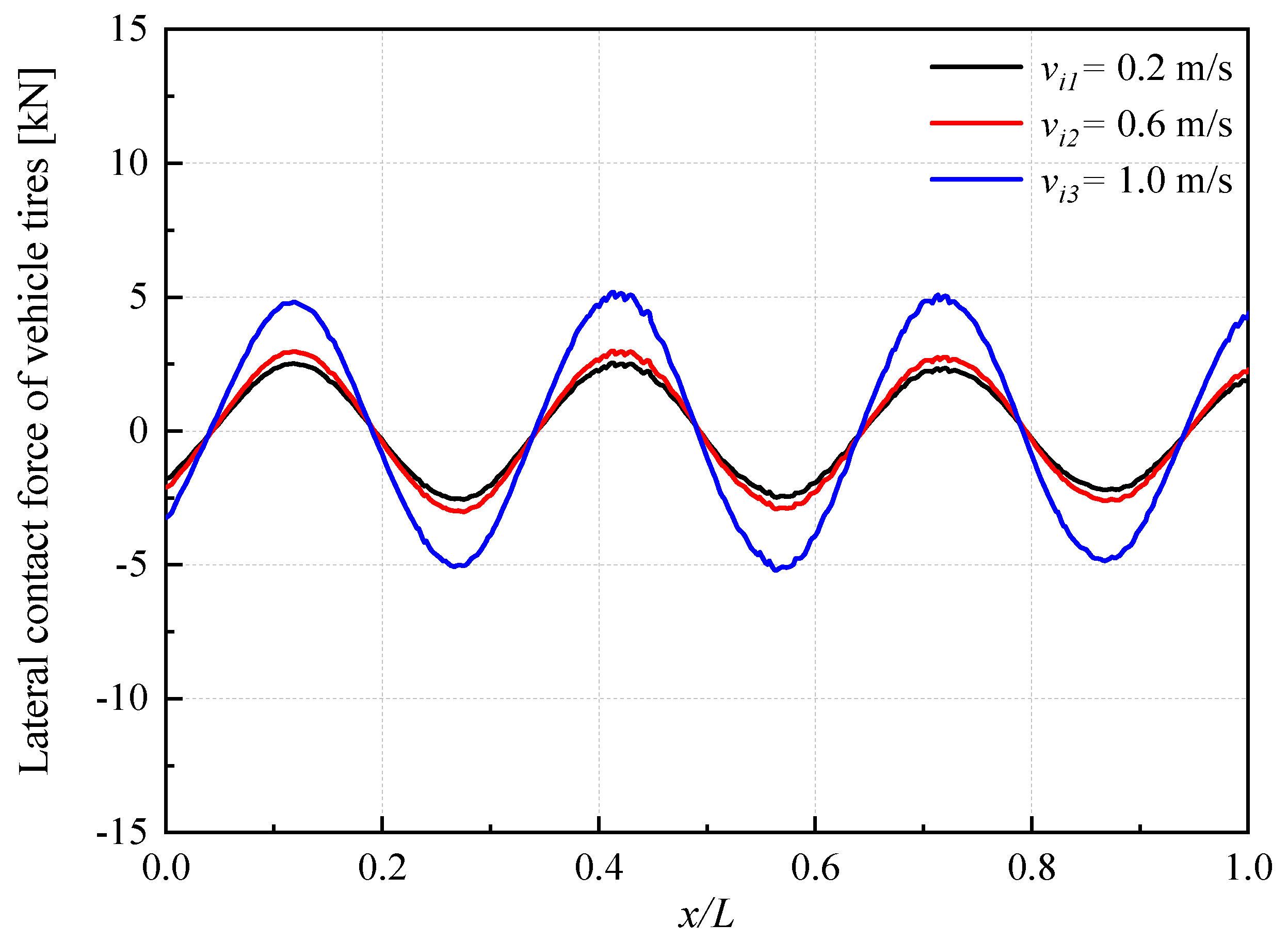
4.1. Influence of Ice Load on Dynamic Responses
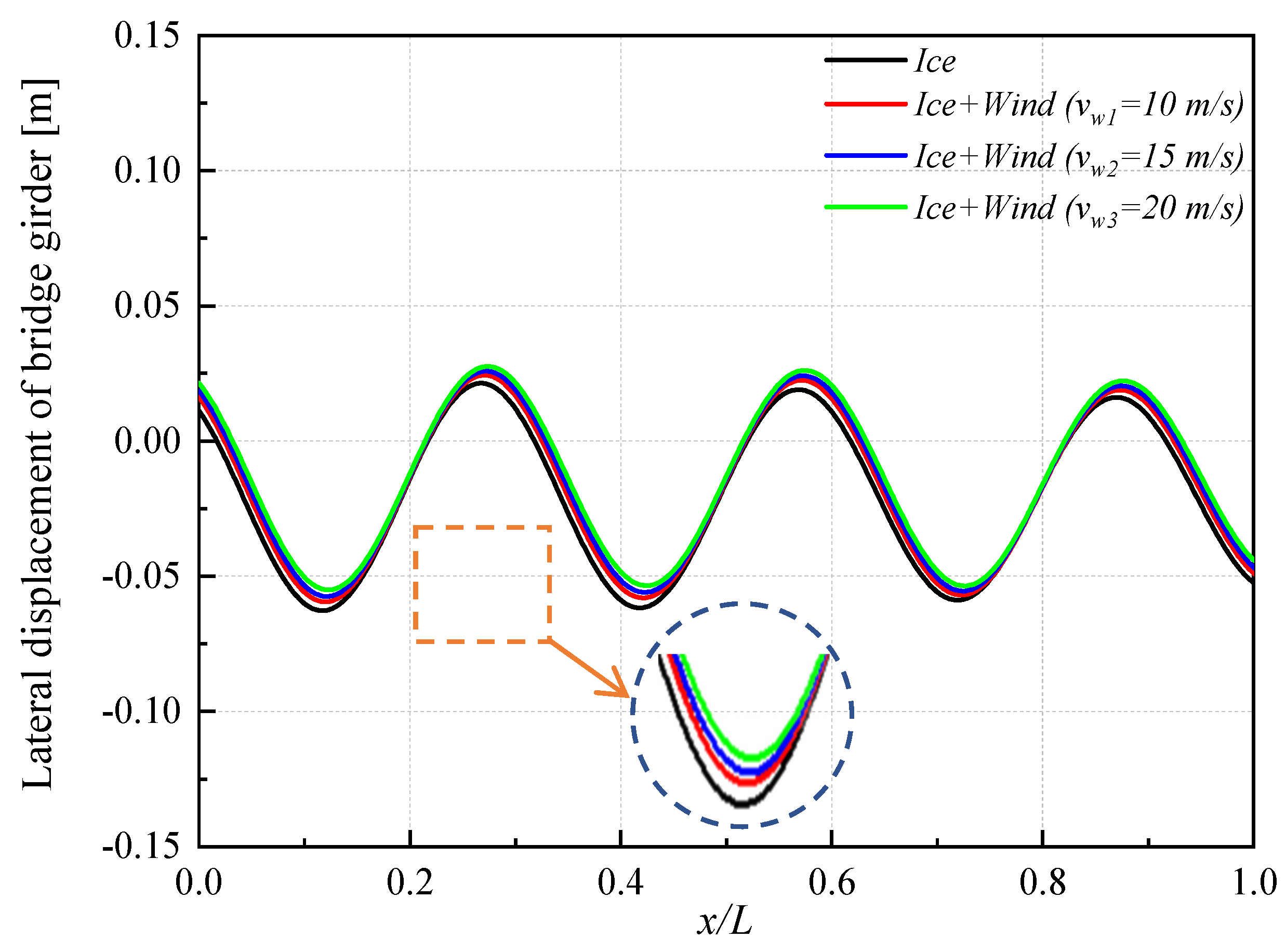
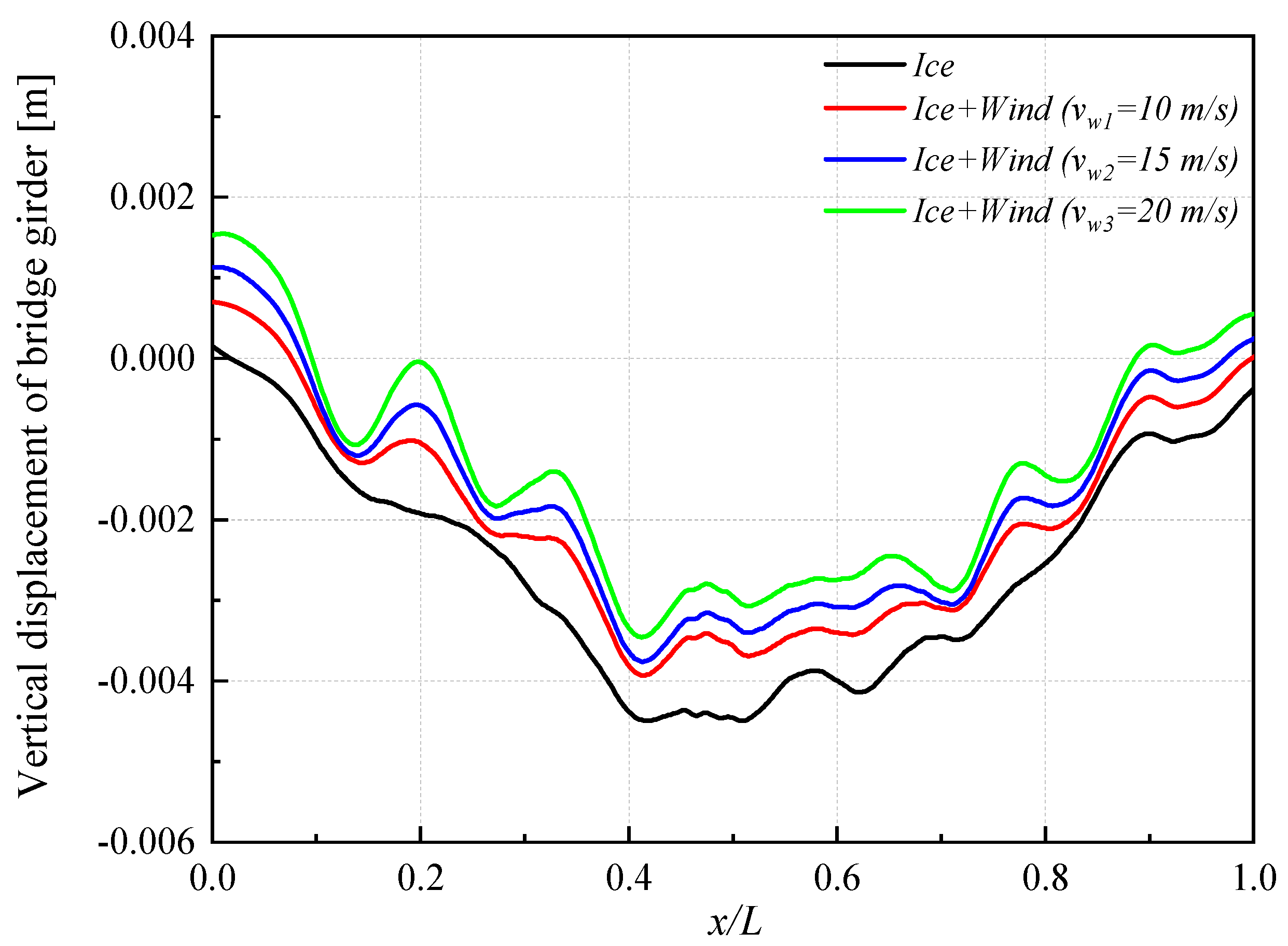
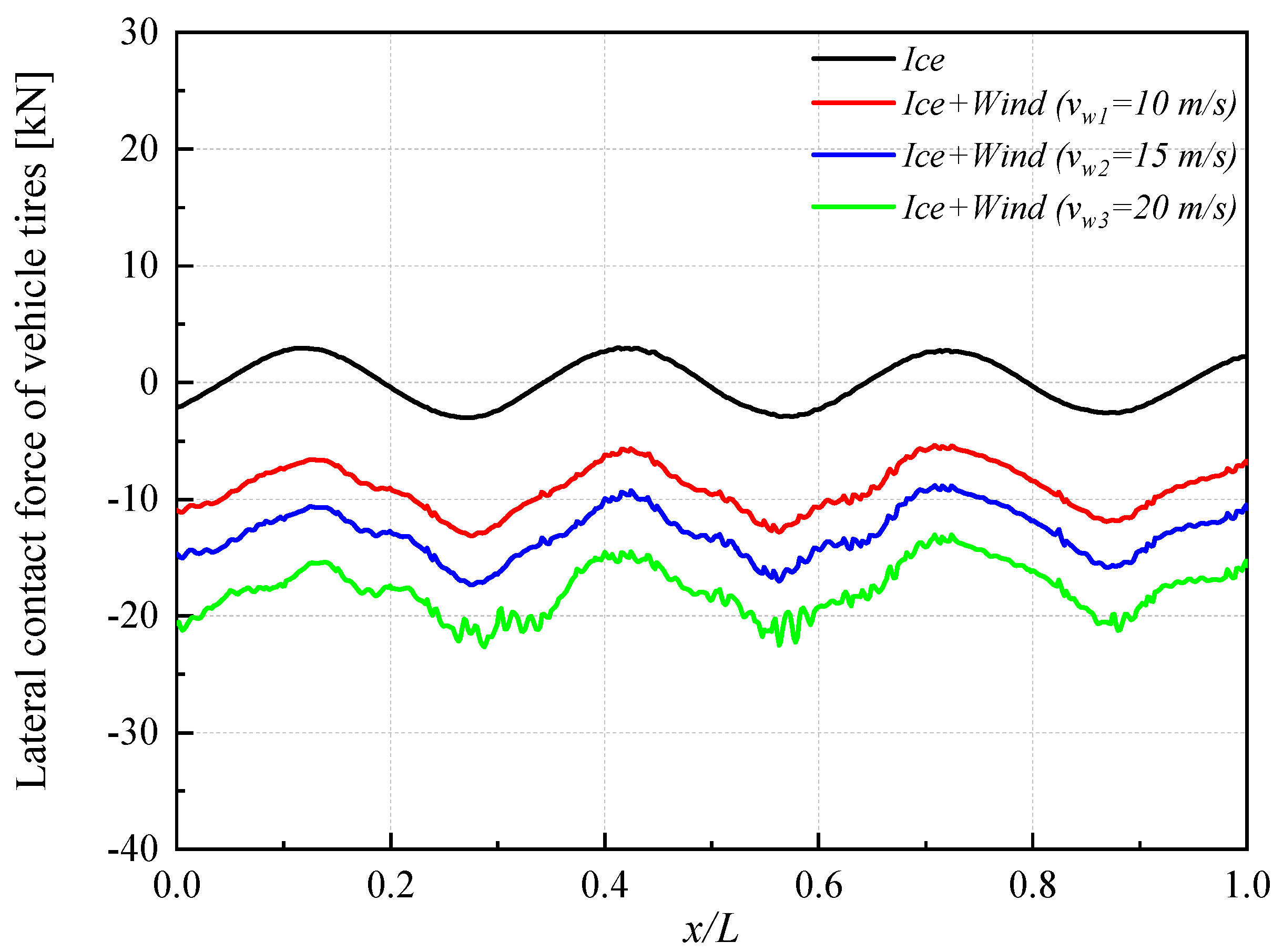
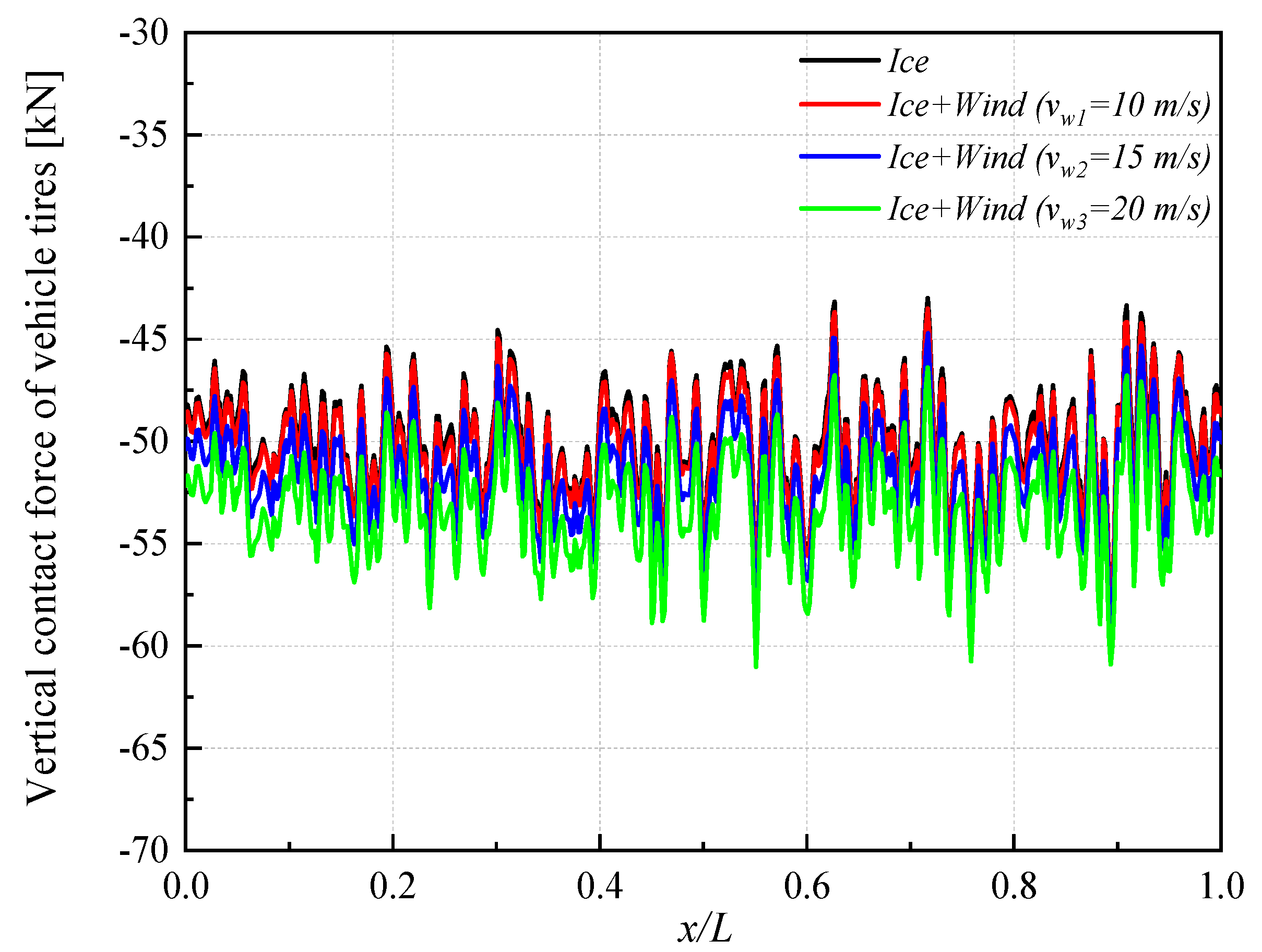
4.2. Influence of Combined Ice and Wind Loads on Dynamic Responses
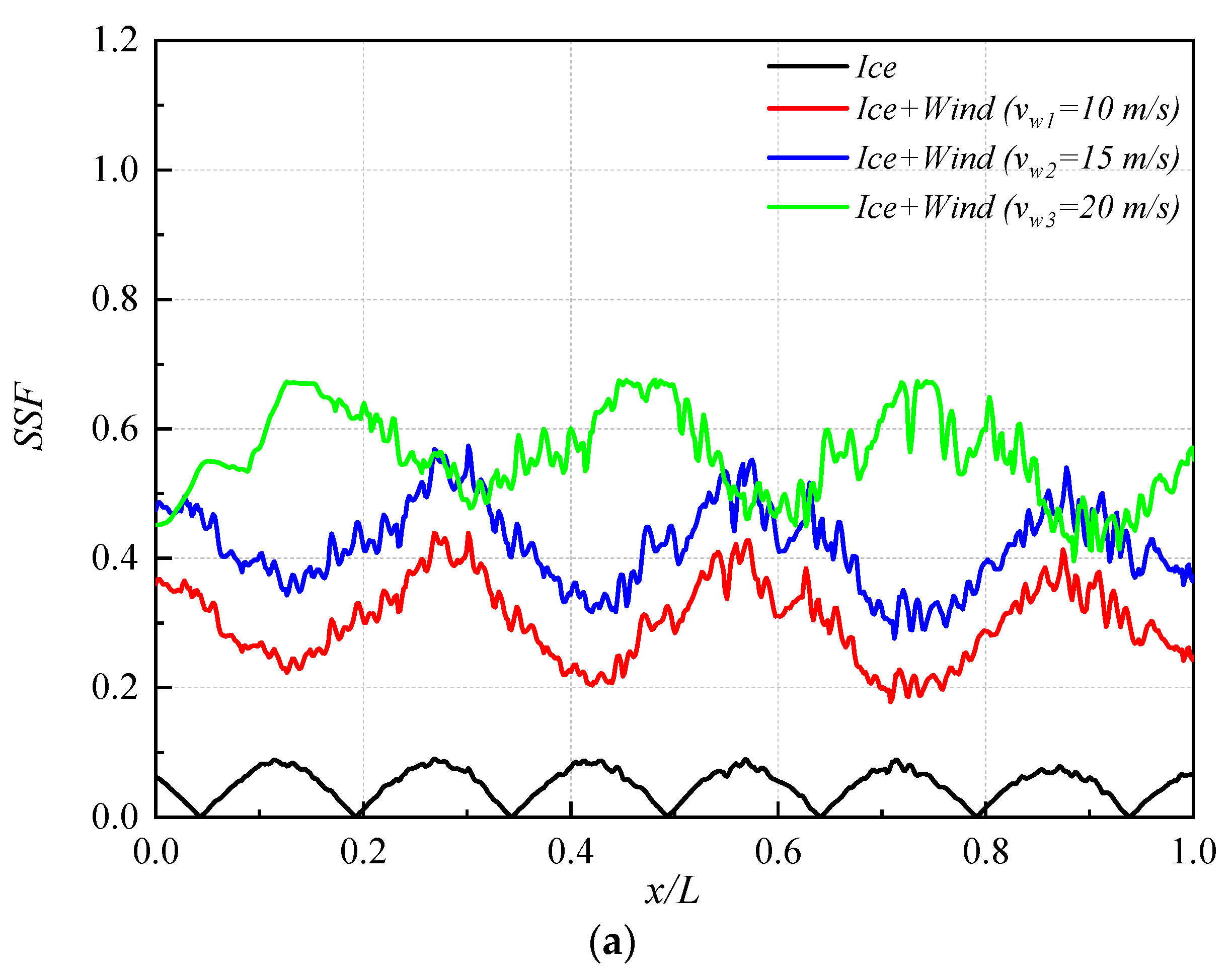
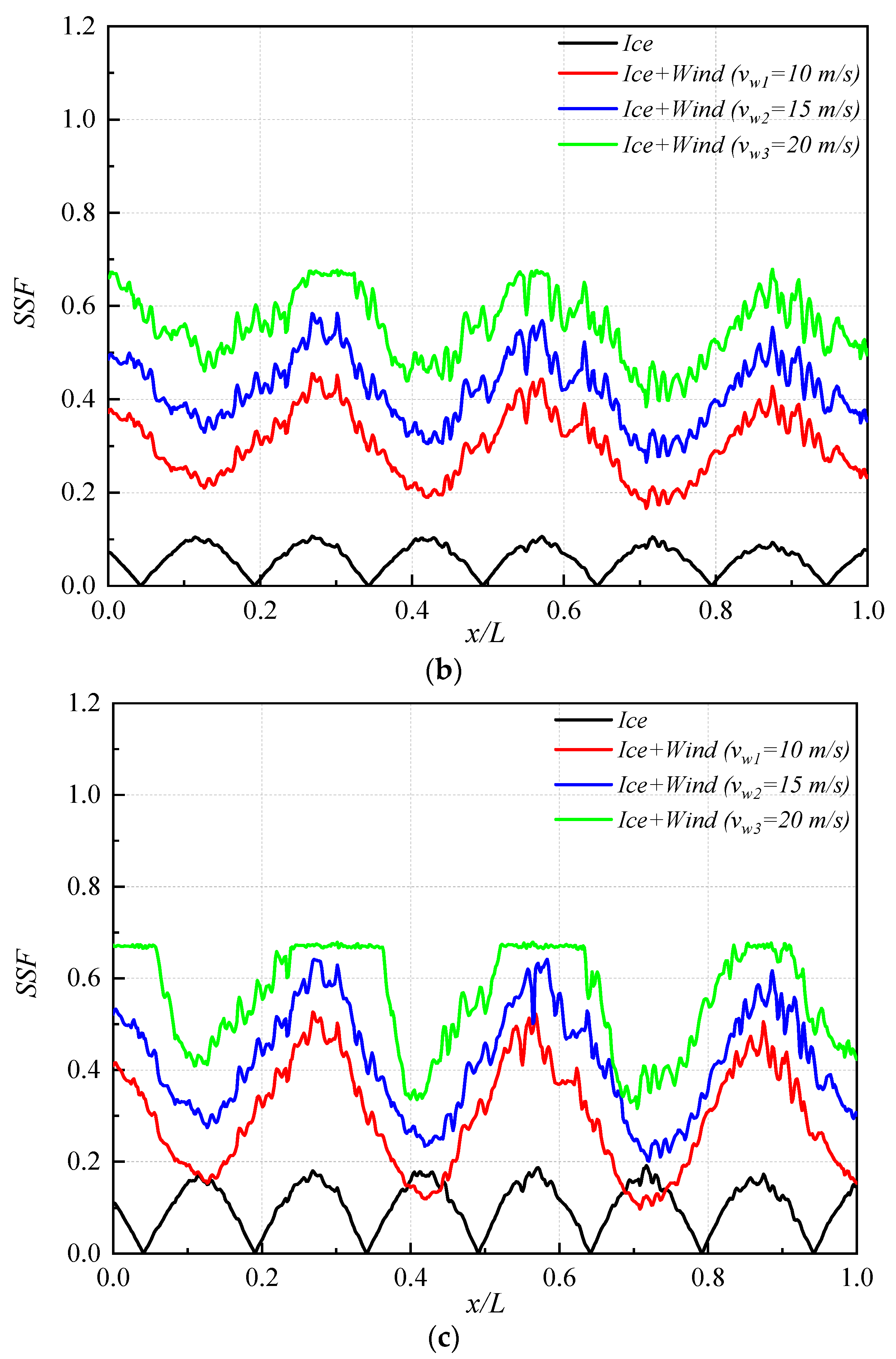
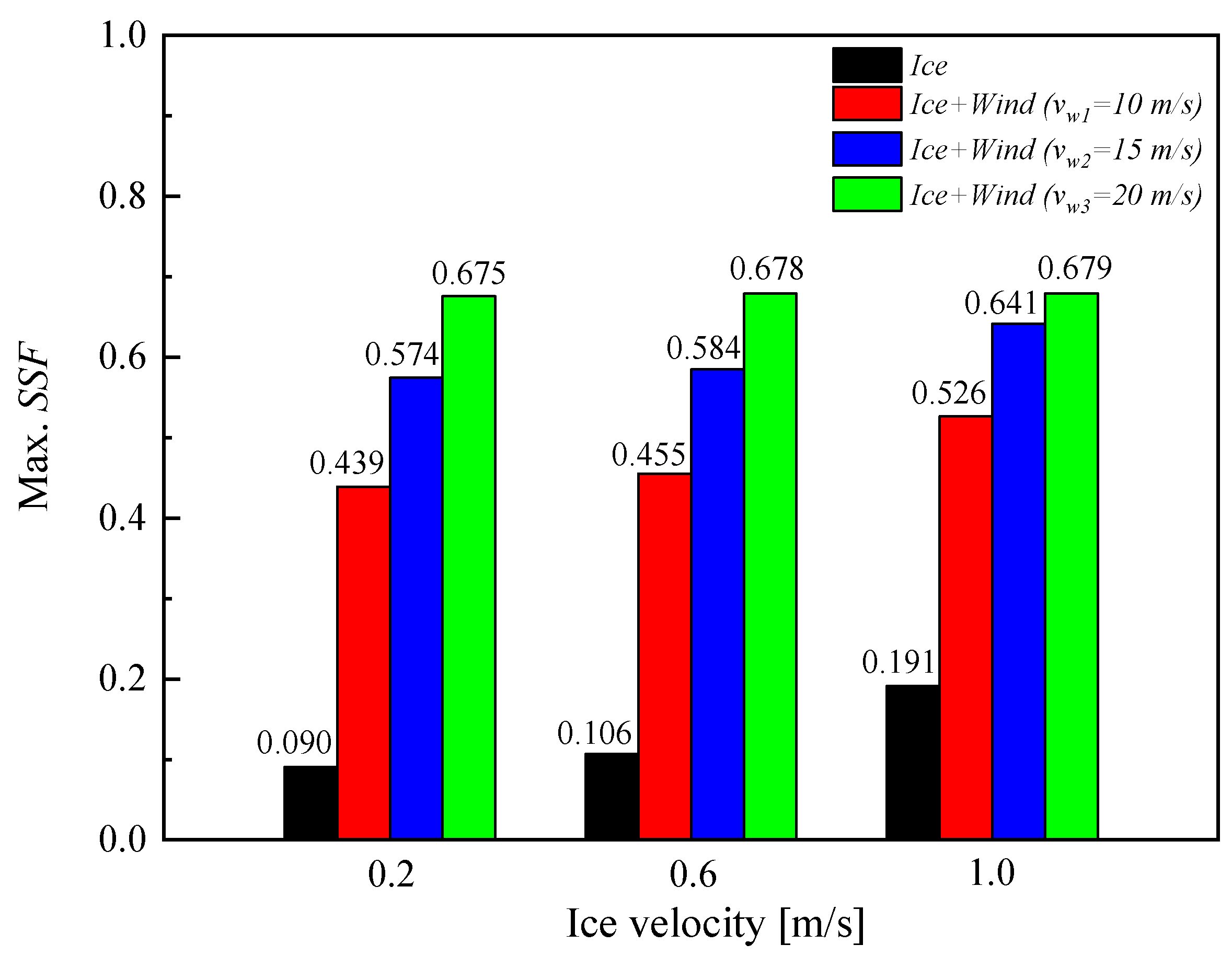
4.3. Sideslip Risk Assessment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, Y.B.; Lin, B.H. Vehicle-bridge interaction analysis by dynamic condensation method. J. Struct. Eng. 1995, 121, 1636–1643. [Google Scholar] [CrossRef]
- Neves, S.G.M.; Azevedo, A.F.M.; Canada, R. A direct method for analyzing the vertical vehicle-structure interaction. Eng. Struct. 2012, 34, 414–420. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.Z.; Kim, C.W.; Chang, K.C. Finite element analysis framework for dynamic vehicle-bridge interaction system based on ABAQUS. Int. J. Struct. Stab. Dyn. 2020, 4, 2050034. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yau, J.D. Vehicle-bridge interaction element for dynamic analysis. J. Struct. Eng. 1997, 11, 1512–1518. [Google Scholar] [CrossRef]
- Camara, A.; Kavrakov, I.; Nguyen, K.; Morgenthal, G. Complete framework of wind-vehicle-bridge interaction with random road surfaces. J. Sound Vib. 2019, 458, 197–217. [Google Scholar] [CrossRef]
- Xie, J.J.; Li, J.; Tian, Z.; Zhen, L.X.; Gu, Y.; Lao, X.D.; Zhang, C.G. Dynamic response analysis of vehicles crossing a bridge considering the randomness of road surface roughness. J. Vib. Shock 2021, 40, 299–306. [Google Scholar]
- Li, Y.L.; Chen, N.; Zhao, K. Seismic response analysis of road vehicle–bridge system for continuous rigid frame bridges with high piers. Earthq. Eng. Eng. Vib. 2012, 11, 593–602. [Google Scholar] [CrossRef]
- Wang, Y.W.; Zheng, K.F.; Xiong, Z.L.; Zhu, J.; Feng, X.-Y.; Lei, M. Coupled vibration analysis of vehicle-bridge foe long-span bridge under wind and earthquake action. China J. Highw. Transp. 2021, 34, 298–308. [Google Scholar]
- Paraskeva, T.S.; Dimitrakopoulos, E.G.; Zeng, Q. Dynamic vehicle-bridge interaction under simultaneous vertical earthquake excitation. Bull. Earthq. Eng. 2016, 15, 71–95. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, S. Fully coupled driving safety analysis of moving traffic on long-span bridges subjected to crosswind. J. Wind Eng. Ind. Aerodyn. 2015, 143, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.L.; Guo, W.H. Dynamic analysis of coupled road vehicle and cable-stayed bridge systems under turbulent wind. Eng. Struct. 2003, 25, 473–486. [Google Scholar] [CrossRef]
- Han, Y.; Cai, C.S.; Zhang, J.; Chen, S.; He, X. Effects of aerodynamic parameters on the dynamic responses of road vehicles and bridges under cross winds. J. Wind Eng. Ind. Aerodyn. 2014, 134, 78–95. [Google Scholar] [CrossRef]
- Guo, W.H.; Xu, Y.L. Safety analysis of moving road vehicles on a long bridge under crosswind. J. Eng. Mech. 2006, 132, 438–446. [Google Scholar] [CrossRef]
- Xia, C.Y. Dynamic Responses of Train-Bridge System Subjected to Collision Loads and Running Safety Evaluation of High-Velocity Trains. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2012. [Google Scholar]
- Xia, C.Y.; Lei, J.Q.; Zhang, N.; Xia, H.; De Roeck, G. Dynamic analysis of a coupled high-velocity train and bridge system subjected to collision load. J. Sound Vib. 2011, 331, 2334–2347. [Google Scholar] [CrossRef]
- Wu, T.Y.; Qiu, W.L.; Kim, C.W.; Chang, K.C.; Lu, X.Z. Dynamic responses of a vehicle-bridge-soil interaction system subjected to stochastic-type ice loads. Struct. Infrastruct. Eng. 2021, 2023586, 1–20. [Google Scholar] [CrossRef]
- Zhou, Y.F.; Chen, S.R. Vehicle ride comfort analysis with whole-body vibration on longspan bridges subjected to crosswind. J. Wind Eng. Ind. Aerodyn. 2016, 155, 126–140. [Google Scholar] [CrossRef] [Green Version]
- Goyal, A.; Chopra, A.K. Simplified evaluation of added hydrodynamic mass for intake towers. J. Eng. Mech. 1989, 11, 1393–1412. [Google Scholar] [CrossRef]
- Zuo, H.; Bi, K.; Hao, H. Dynamic analyses of operating offshore wind turbines including soil-structure interaction. Eng. Struct. 2018, 157, 42–62. [Google Scholar] [CrossRef]
- DNV-OS-J101; Design of Offshore Wind Turbine Structures. Det Norske Veritas: Oslo, Norway, 2010.
- Wu, T.Y.; Qiu, W.L. Dynamic analyses of pile-supported bridges including soil-structure interaction under stochastic ice loads. Soil Dyn. Earthq. Eng. 2020, 128, 105879. [Google Scholar] [CrossRef]
- ISO-8608; Mechanical Vibration-Road Surface Profiles-Reporting of Measured Data. International Organization for Standardization-8608: Geneva, Switzerland, 1995.
- Dodds, C.J.; Robson, J.D. The description of road surface roughness. J. Sound Vib. 1973, 31, 175–183. [Google Scholar] [CrossRef]
- Wang, H.; Mao, J.X.; Spencer, B.F. A monitoring-based approach for evaluating dynamic responses of riding vehicle on long-span bridge under strong winds. Eng. Struct. 2019, 189, 35–47. [Google Scholar] [CrossRef]
- Peri, D.; Owen, D.R.J. Computational model for 3-D contact problems with friction based on the penalty method. Int. J. Numer. Methods Eng. 1992, 35, 1289–1309. [Google Scholar] [CrossRef]
- Hunˇek, I. On a penalty formulation for contact-impact problems. Comput. Struct. 1993, 48, 193–203. [Google Scholar] [CrossRef]
- Määttänen, M. On Conditions for the Rise of Self-Excited Ice-Induced Autonomous Oscillations in Slender Marine Pile Structures. Winter Navigation Research Board: Helsinki, Finland, 1978. [Google Scholar]
- Wang, L.Y.; Xu, J.Z. Theoretical analysis model of dynamic interaction between ice and structure. Haiyang Xuebao 1993, 3, 140–146. [Google Scholar]
- Wright, B. Insights from Molikpaq Ice Loading Data. In Validation of Low Level Ice Forces on Coastal Structures; Report LOLEIF Report No. 1, EU Project, Contract MAS3-CT 97-0098; HSVA: Hamburg, Germany.
- Palmer, A.C.; Goodman, D.J.; Ashby, M.F.; Evans, A.G.; Hutchinson, J.W.; Ponter, A.R.S. Fracture and its role in determining ice forces on offshore structures. Ann. Glaciol. 1983, 4, 216–221. [Google Scholar] [CrossRef] [Green Version]
- Eivind, S.L. Numerical Modelling of Ice Induced Vibrations of Lock-In Type; Norwegian University of Science and Technology: Trondheim, Norway, 2014. [Google Scholar]
- Chen, N.; Li, Y.; Wang, B.; Su, Y.; Xiang, H. Effects of wind barrier on the safety of vehicles driven on bridges. J. Wind Eng. Ind. Aerodyn. 2015, 143, 113–127. [Google Scholar] [CrossRef]
- Scanlan, R.H.; Jones, N.P. Aeroelastic analysis of cable-stayed bridges. J. Struct. Eng. 1990, 116, 279–297. [Google Scholar] [CrossRef]
- Ji, S.Y.; Yue, Q.J.; Bi, X.J. Probability distribution of sea ice fatigue parameters in JZ20-2 sea area of the Liaodong Bay. Ocean Eng. 2002, 20, 39–43. [Google Scholar]
- Ji, S.Y.; Yue, Q.J. Monte-Carlo simulation of fatigue ice load for offshore platform with ice-broken gone in the Liaodong gulf. Haiyang Xuebao 2003, 25, 114–119. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wind Velocity [m/s] | Ice Velocity [m/s] | ||||
|---|---|---|---|---|---|
| vi1 = 0.2 | vi2 = 0.6 | vi3 = 1.0 | |||
| Max. SSF | Max. SSF | Difference [%] | Max. SSF | Difference [%] | |
| vw0 = 0 | 0.09 | 0.106 | 17.77 | 0.191 | 112.22 |
| vw1 = 10 | 0.439 | 0.455 | 3.64 | 0.526 | 19.81 |
| vw2 = 15 | 0.574 | 0.584 | 1.74 | 0.641 | 11.67 |
| vw3 = 20 | 0.675 | 0.678 | 0.44 | 0.679 | 0.59 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, T.; Qiu, W.; Wu, H.; Yao, G.; Guo, Z. Coupled Vibration Analysis of Ice–Wind–Vehicle–Bridge Interaction System. J. Mar. Sci. Eng. 2023, 11, 535. https://doi.org/10.3390/jmse11030535
Wu T, Qiu W, Wu H, Yao G, Guo Z. Coupled Vibration Analysis of Ice–Wind–Vehicle–Bridge Interaction System. Journal of Marine Science and Engineering. 2023; 11(3):535. https://doi.org/10.3390/jmse11030535
Chicago/Turabian StyleWu, Tianyu, Wenliang Qiu, Hao Wu, Guowen Yao, and Zengwei Guo. 2023. "Coupled Vibration Analysis of Ice–Wind–Vehicle–Bridge Interaction System" Journal of Marine Science and Engineering 11, no. 3: 535. https://doi.org/10.3390/jmse11030535