
Hydraulic Bottom Friction and Aerodynamic Roughness Coefficients for Mangroves in Southwest Florida, USA

Abstract
:1. Introduction
2. Materials and Methods
2.1. Research Setting
2.2. Field Determination of Manning’s n
- Degree of irregularity (n1). This factor was assessed by carefully walking through the site core and qualitatively assessing the microtopographic variation or rugosity contributed by depressions and/or mounds with areas of approximately 1 m2 or less.
- Effect of obstruction (n3). The researchers viewed the site core from multiple external positions and estimated the percentage of vertical cross-sectional area occupied by non-vegetative or non-living vegetative debris such as boulders, fallen logs, and garbage.
- Amount of vegetation (n4). Like n3, the researchers viewed the site core from multiple external positions and estimated the percentage of vertical cross-sectional area occupied by living vegetation.
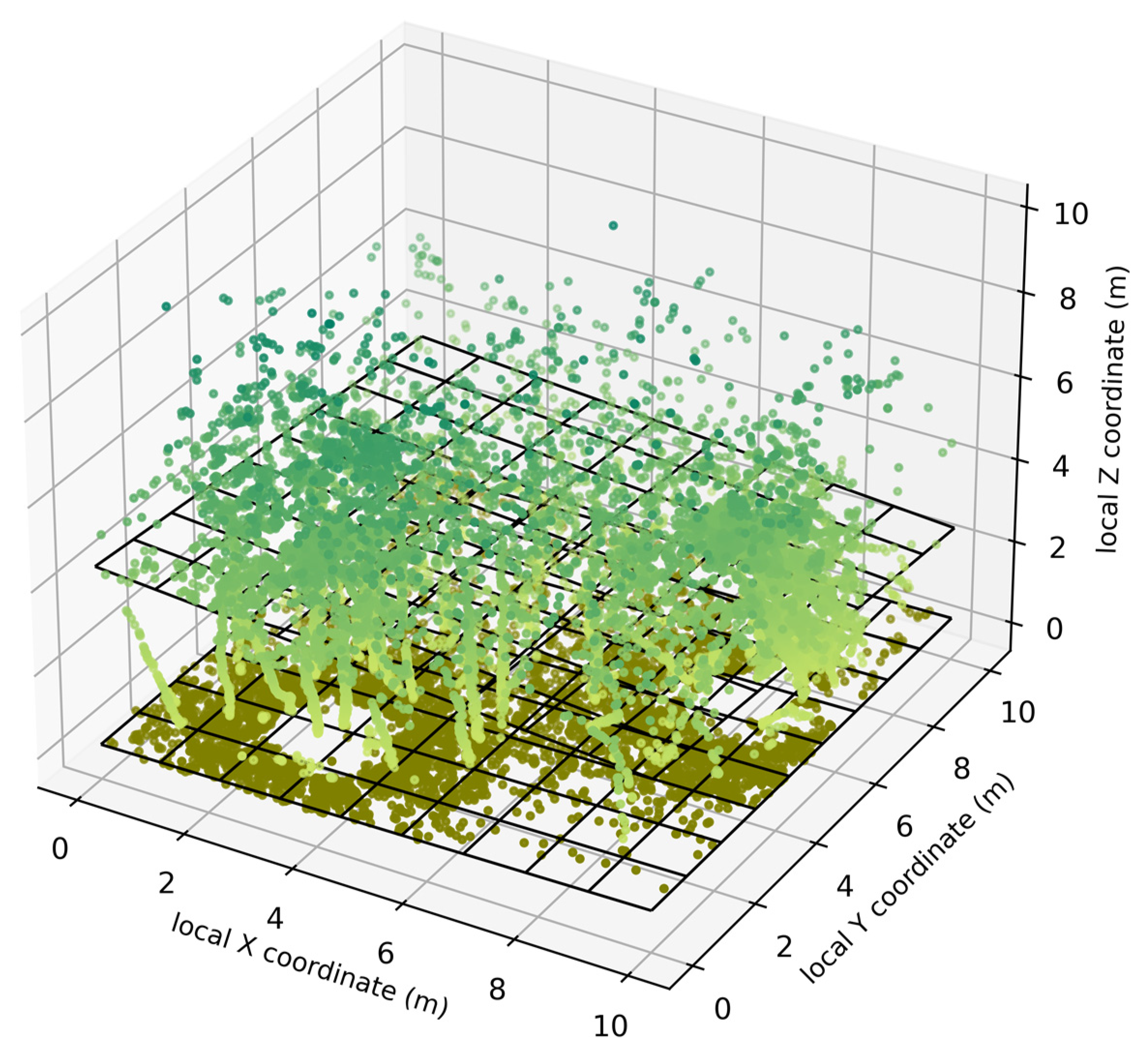
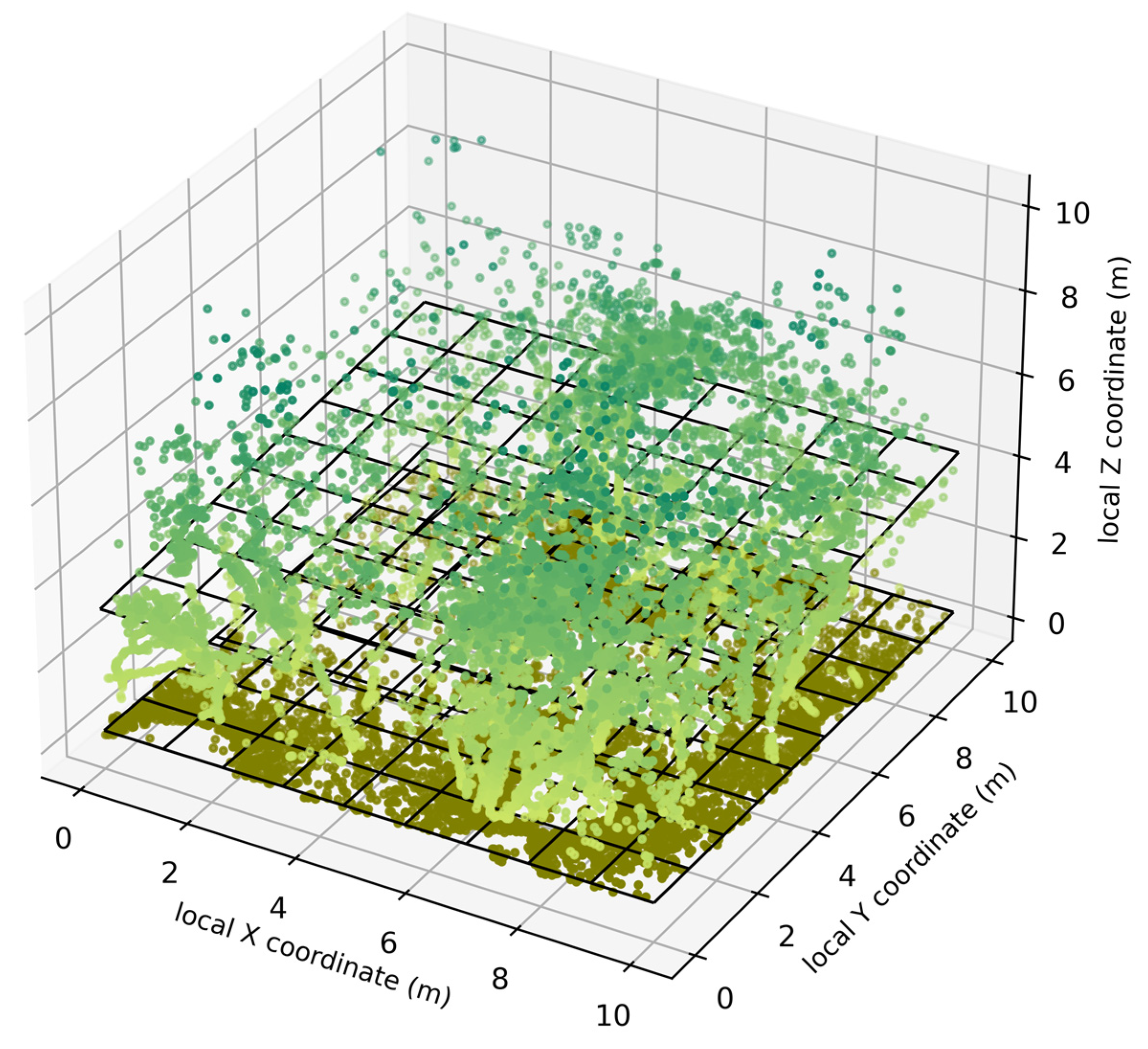
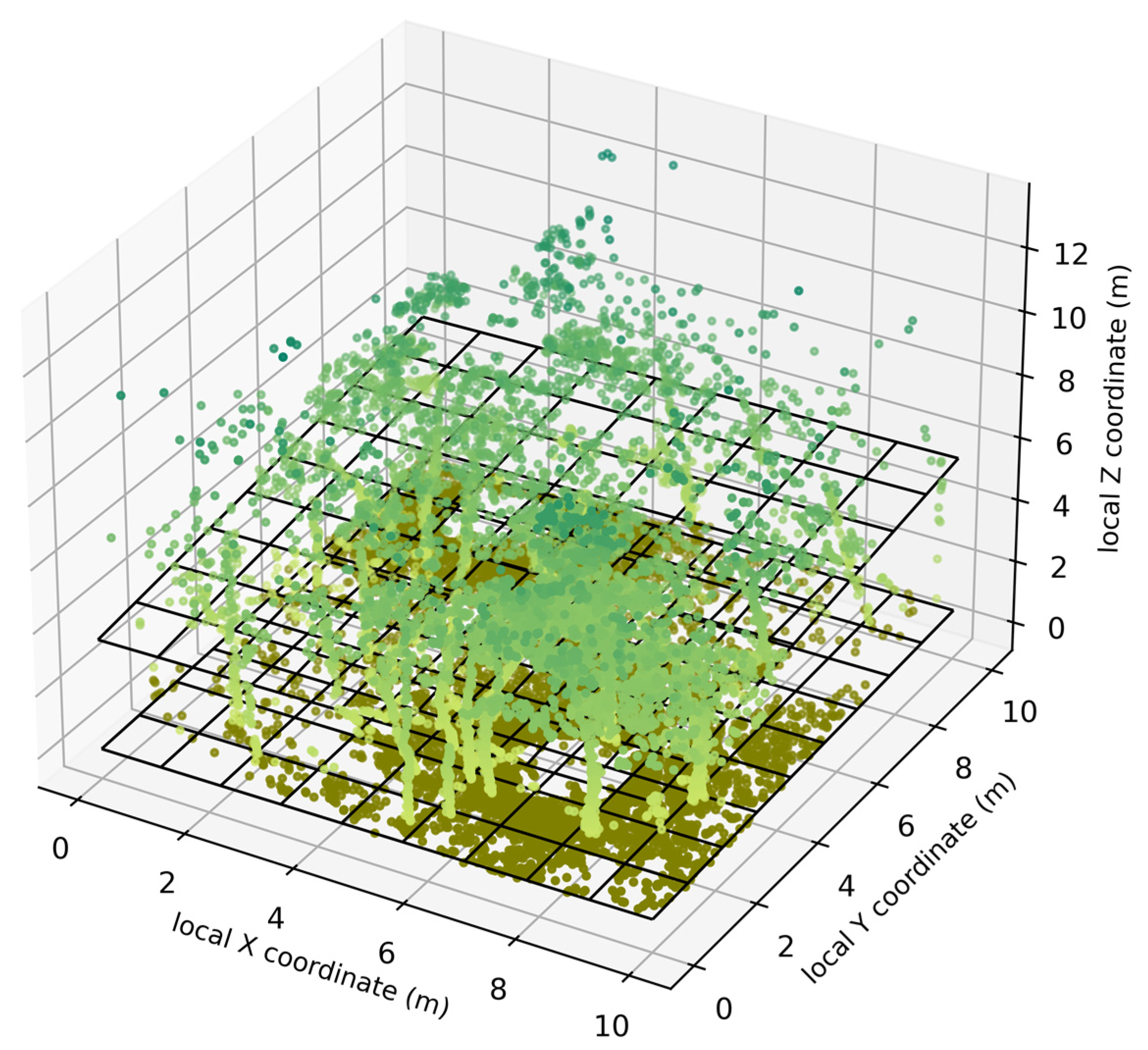
2.3. Laser Scanning Data Acquisition and Processing
2.4. Determination of Aerodynamic Roughness Length from TLS
2.5. Random Forest Technique for Surface Roughness Parameter Estimation
3. Results
3.1. Field Measured Manning’s n Values
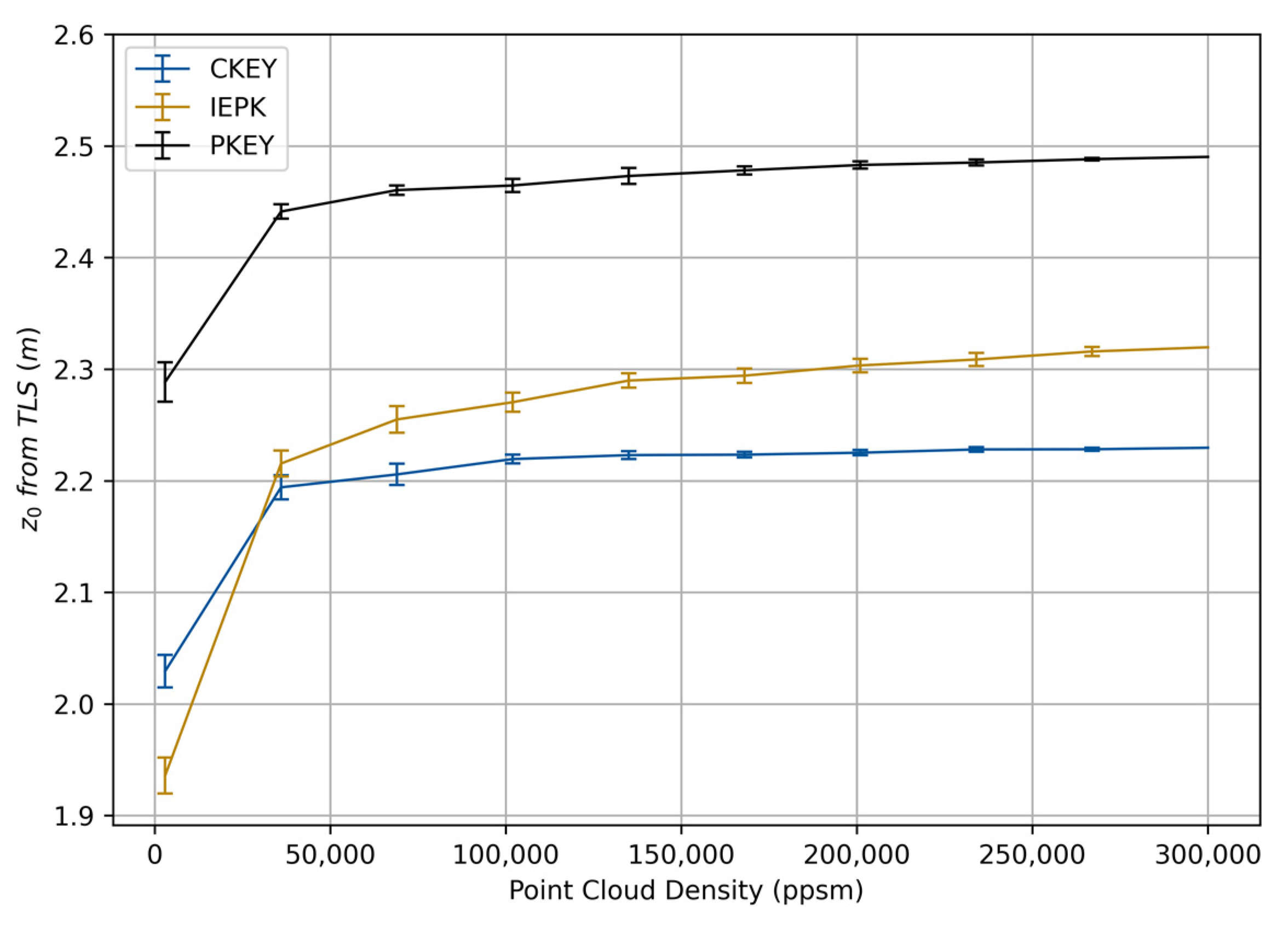
3.2. Aerodynamic Roughness Length Measured from TLS Data
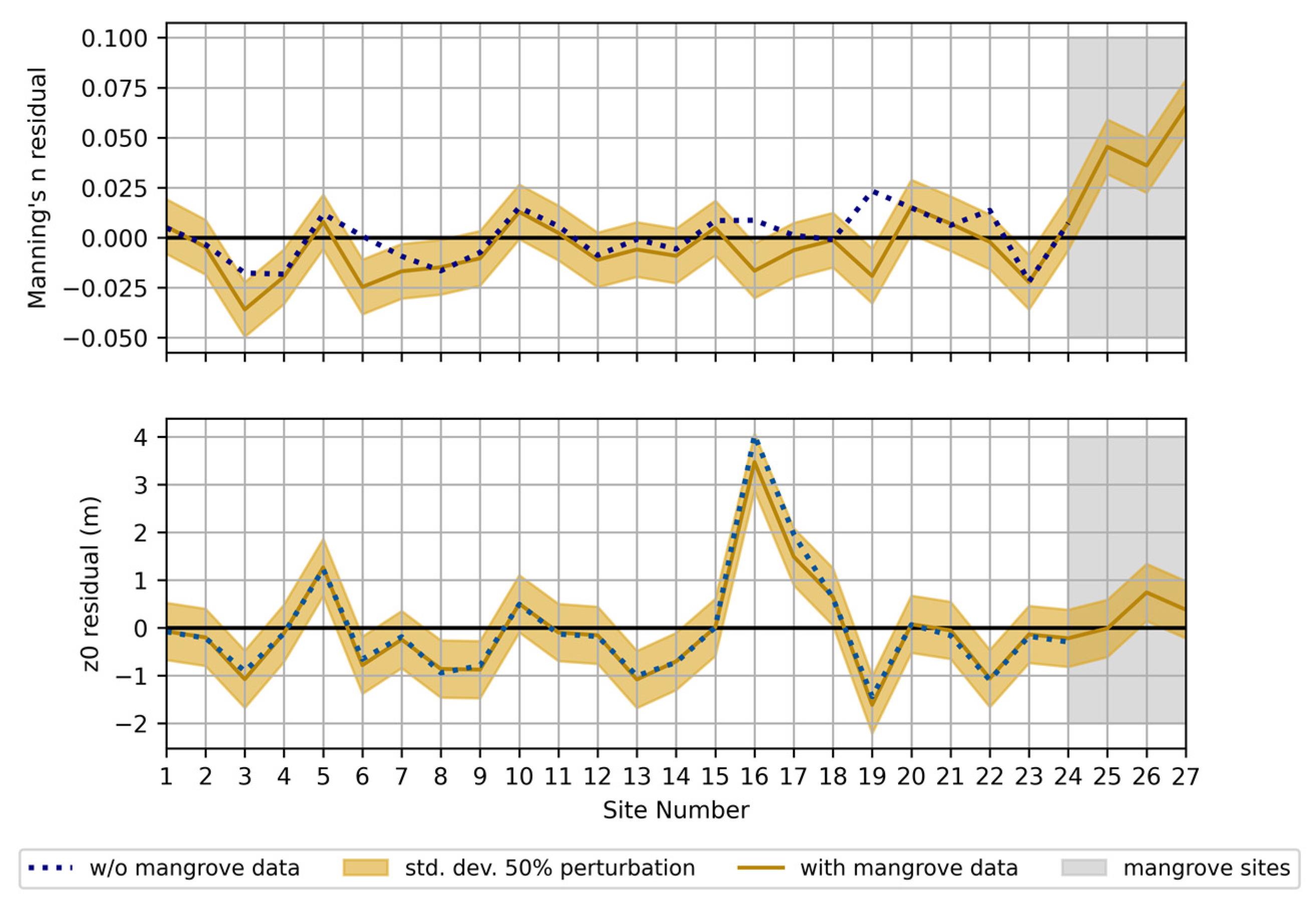
3.3. Leave-One-Out Cross-Validation of Expanded Random Forest Parameter Estimation Model
4. Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flood-Plain Conditions | n Value Adjustment | Example |
|---|---|---|
| Degree of Irregularity (n1) | ||
| Smooth | 0.000 | Compares to the smoothest, flattest flood-plain attainable in a given bed material. |
| Minor | 0.001–0.005 | Is a Flood Plain Slightly irregular in shape. A few rises and dips or sloughs may be more visible on the flood plain. |
| Moderate | 0.006–0.010 | Has more rises and dips. Sloughs and hummocks may occur. |
| Severe | 0.011–0.020 | Flood Plain very irregular in shape. Many rises and dips or sloughs are visible. Irregular ground surfaces in pasture land and furrows perpendicular to the flow are also included. |
| Variation of Flood-Plain cross section (n2) | ||
| Gradual | 0.0 | Not applicable |
| Effect of obstruction (n3) | ||
| Negligible | 0.000–0.004 | Few scattered obstructions, which include debris deposits, stumps, exposed roots, logs, piers, or isolated boulders, that occupy less than 5 percent of the cross-sectional area. |
| Minor | 0.005–0.019 * | Obstructions occupy less than 15 percent of the cross-sectional area. |
| Appreciable | 0.020–0.030 | Obstructions occupy from 15 percent to 50 percent of the cross-sectional area. |
| Amount of vegetation (n4) | ||
| Small | 0.001–0.010 | Dense growths of flexible turf grass, such as Bermuda, or weeds growingwhere the average depth of flow is at least two times the height of the vegetation; supple tree seedlings such as willow, cottonwood, arrow-weed, or saltcedar growing where the average depth of flow is at least three times the height of the vegetation. |
| Medium | 0.010–0.025 | Turf grass growing where the average depth of flow is from one to two times the height of the vegetation; moderately dense stemy grass, weeds, or tree seedlings growing where the average depth of flow is from two to three times the height of the vegetation; brushy, moderately dense vegetation, similar to 1-to-2-year-old willow trees in the dormant season. |
| Large | 0.025–0.050 | Turf grass growing where the average depth of flow is about equal to the height of the vegetation; 8-to-10-years-old willow or cottonwood trees intergrow with some weeds and brush (none of the vegetation in foliage) where the hydraulic radius exceeds 0.607 m; or mature row crops such as small vegetables, or mature field crops where depth flow is at least twice the height of the vegetation. |
| Very Large | 0.050–0.100 | Turf grass growing where the average depth of flow is less than half the height of the vegetation; or moderate to dense brush, or heavy stand of timber with few down trees and little undergrowth where depth of flow is below branches, or mature field crops where depth of flow is less than the height of the vegetation. |
| Extreme | 0.100–0.200 | Dense bushy willow, mesquite, and saltcedar (all vegetation in full foliage), or heavy stand of timber, few down trees, depth of reaching branches. |
| Degree of Meander (m) | ||
| 1.0 | Not Applicable | |
References
- Montgomery, J.M.; Bryan, K.R.; Mullarney, J.C.; Horstman, E.M. Attenuation of Storm Surges by Coastal Mangroves. Geophys. Res. Lett. 2019, 46, 2680–2689. [Google Scholar] [CrossRef]
- Dasgupta, S.; Islam, S.; Huq, M.; Khan, Z.H.; Hasib, R. Quantifying the protective capacity of mangroves from storm surges in coastal Bangladesh. PLoS ONE 2019, 14, e0214079. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Zhang, K.; Li, Y.; Xie, L. Numerical study of the sensitivity of mangroves in reducing storm surge and flooding to hurricane characteristics in southern Florida. Cont. Shelf Res. 2013, 64, 51–65. [Google Scholar] [CrossRef]
- Zhang, K.; Liu, H.; Li, Y.; Xu, H.; Shen, J.; Rhome, J.; Smith, T.J. The role of mangroves in attenuating storm surges. Estuar. Coast. Shelf Sci. 2012, 102–103, 11–23. [Google Scholar] [CrossRef]
- Blankespoor, B.; Dasgupta, S.; Lange, G.-M. Mangroves as a protection from storm surges in a changing climate. Ambio 2017, 46, 478–491. [Google Scholar] [CrossRef]
- Smith, T.J.; Anderson, G.H.; Balentine, K.; Tiling, G.; Ward, G.A.; Whelan, K.R.T. Cumulative impacts of hurricanes on Florida mangrove ecosystems: Sediment deposition, storm surges and vegetation. Wetlands 2009, 29, 24–34. [Google Scholar] [CrossRef]
- Lagomasino, D.; Fatoyinbo, T.; Castañeda-Moya, E.; Cook, B.D.; Montesano, P.M.; Neigh, C.S.R.; Corp, L.A.; Ott, L.E.; Chavez, S.; Morton, D.C. Storm surge and ponding explain mangrove dieback in southwest Florida following Hurricane Irma. Nat. Commun. 2021, 12, 4003. [Google Scholar] [CrossRef]
- Luettich, R.A.; Westerink, J.J.; Scheffner, N.W. ADCIRC: An Advanced Three-Dimensional Circulation Model for Shelves, Coasts, and Estuaries, Report 1: Theory and Methodology of ADCIRC-2DDI and ADCIRC-3DL; Department of the Army, US Army Corps of Engineers, Waterways Experiment Station: Vicksburg, MS, USA, 1992; pp. 1–137. [Google Scholar]
- Luettich, R.; Westerink, J. Formulation and Numerical Implementation of the 2D/3D ADCIRC Finite Element Model Version 44. XX; University of North Carolina Rep.: Chapel Hill, NC, USA, 2004; p. 74. [Google Scholar]
- Dietrich, J.C.; Westerink, J.J.; Kennedy, A.B.; Smith, J.M.; Jensen, R.E.; Zijlema, M.; Holthuijsen, L.H.; Dawson, C.; Luettich, R.A., Jr.; Powell, M.D.; et al. Hurricane Gustav (2008) waves and storm surge: Hindcast, synoptic analysis and validation in southern Louisiana. Mon. Weather Rev. 2011, 139, 2488–2522. [Google Scholar] [CrossRef]
- Bilskie, M.V.; Hagen, S.C.; Medeiros, S.C.; Cox, A.T.; Salisbury, M.; Coggin, D. Data and numerical analysis of astronomic tides, wind-waves, and hurricane storm surge along the northern Gulf of Mexico. J. Geophys. Res.-Ocean. 2016, 121, 3625–3658. [Google Scholar] [CrossRef]
- Booij, N.; Ris, R.C.; Holthuijsen, L.H. A third-generation wave model for coastal regions: 1. Model description and validation. J. Geophys. Res. 1999, 104, 7649–7666. [Google Scholar] [CrossRef]
- Dietrich, J.C.; Zijlema, M.; Westerink, J.J.; Holthuijsen, L.H.; Dawson, C.; Luettich, R.A., Jr.; Jensen, R.E.; Smith, J.M.; Stelling, G.S.; Stone, G.W. Modeling hurricane waves and storm surge using integrally-coupled, scalable computations. Coast. Eng. 2011, 58, 45–65. [Google Scholar] [CrossRef]
- Straatsma, M. 3D float tracking: In situ floodplain roughness estimation. Hydrol. Process. 2009, 23, 201–212. [Google Scholar] [CrossRef]
- Straatsma, M.W.; Baptist, M.J. Floodplain roughness parameterization using airborne laser scaning and spectral remote sensing. Remote Sens. Environ. 2008, 112, 1062–1080. [Google Scholar] [CrossRef]
- Mayo, T.; Butler, T.; Dawson, C.; Hoteit, I. Data assimilation within the Advanced Circulation (ADCIRC) modeling framework for the estimation of Manning’s friction coefficient. Ocean Model. 2014, 76, 43–58. [Google Scholar] [CrossRef]
- Shields, F.D.; Coulton, K.G.; Nepf, H. Representation of Vegetation in Two-Dimensional Hydrodynamic Models. J. Hydraul. Eng. 2017, 143, 02517002. [Google Scholar] [CrossRef]
- Werner, M.; Hunter, N.; Bates, P. Identifiability of distributed floodplain roughness values in flood extent estimation. J. Hydrol. 2005, 314, 139–157. [Google Scholar] [CrossRef]
- Morsy, M.M.; Lerma, N.R.; Shen, Y.; Goodall, J.L.; Huxley, C.; Sadler, J.M.; Voce, D.; O’neil, G.L.; Maghami, I.; Zahura, F.T. Impact of Geospatial Data Enhancements for Regional-Scale 2D Hydrodynamic Flood Modeling: Case Study for the Coastal Plain of Virginia. J. Hydrol. Eng. 2021, 26, 05021002. [Google Scholar] [CrossRef]
- Warren, I.; Bach, H. MIKE 21: A modelling system for estuaries, coastal waters and seas. Environ. Softw. 1992, 7, 229–240. [Google Scholar] [CrossRef]
- Makris, C.; Mallios, Z.; Androulidakis, Y.; Krestenitis, Y. CoastFLOOD: A High-Resolution Model for the Simulation of Coastal Inundation Due to Storm Surges. Hydrology 2023, 10, 103. [Google Scholar] [CrossRef]
- Bunya, S.; Dietrich, J.C.; Westerink, J.J.; Ebersole, B.A.; Smith, J.M.; Atkinson, J.H.; Jensen, R.; Resio, D.T.; Luettich, R.A.; Dawson, C.; et al. A High-Resolution Coupled Riverine flow, Tide, Wind, Wind Wave, and Storm Surge Model for Southern Louisiana and Missippi. Part I: Model Development and Validation. Mon. Weather Rev. 2010, 128, 354–358. [Google Scholar]
- Atkinson, J.; Roberts, H.; Hagen, S.C.; Zou, S.; Bacopoulos, P.; Medeiros, S.C.; Weishampel, J.F.; Cobell, Z. Deriving frictional parameters and performing historical validation for an ADCIRC storm surge model of the Florida gulf coast. Fla. Watershed J. 2011, 4, 22–27. [Google Scholar]
- Medeiros, S.C.; Hagen, S.C.; Weishampel, J.F. Comparison of floodplain surface roughness parameters derived from land cover data and field measurements. J. Hydrol. 2012, 452–453, 139–149. [Google Scholar] [CrossRef]
- Medeiros, S.C.; Ali, T.; Hagen, S.C.; Raiford, J.P. Development of a Seamless Topographic / Bathymetric Digital Terrain Model for Tampa Bay, Florida. Photogramm. Eng. Remote Sens. 2011, 77, 1249–1256. [Google Scholar] [CrossRef]
- Bilskie, M.V.; Coggin, D.; Hagen, S.C.; Medeiros, S.C. Terrain-driven unstructured mesh development through semi-automatic vertical feature extraction. Adv. Water Resour. 2015, 86, 102–118. [Google Scholar] [CrossRef]
- Hovenga, P.A.; Wang, D.; Medeiros, S.C.; Hagen, S.C.; Alizad, K. The response of runoff and sediment loading in the Apalachicola River, Florida to climate and land use land cover change. Earth’s Future 2016, 4, 124–142. [Google Scholar] [CrossRef]
- Alizad, K.; Hagen, S.C.; Medeiros, S.C.; Bilskie, M.V.; Morris, J.T.; Balthis, L.; Buckel, C.A. Dynamic responses and implications to coastal wetlands and the surrounding regions under sea level rise. PLoS ONE 2018, 13, e0205176. [Google Scholar] [CrossRef] [PubMed]
- Alizad, K.; Hagen, S.C.; Morris, J.T.; Bacopoulos, P.; Bilskie, M.V.; Weishampel, J.F.; Medeiros, S.C. A coupled, two-dimensional hydrodynamic-marsh model with biological feedback. Ecol. Model. 2016, 327, 29–43. [Google Scholar] [CrossRef]
- Hightower, J.N.; Butterfield, A.C.; Weishampel, J.F. Quantifying Ancient Maya Land Use Legacy Effects on Contemporary Rainforest Canopy Structure. Remote Sens. 2014, 6, 10716–10732. [Google Scholar] [CrossRef]
- Cannon, D.; Kibler, K.M.; Kitsikoudis, V.; Medeiros, S.C.; Walters, L.J. Variation of mean flow and turbulence characteristics within canopies of restored intertidal oyster reefs as a function of restoration age. Ecol. Eng. 2022, 180, 106678. [Google Scholar] [CrossRef]
- Cannon, D.J.; Kibler, K.M.; Taye, J.; Medeiros, S.C. Characterizing canopy complexity of natural and restored intertidal oyster reefs (Crassostrea virginica) with a novel laser-scanning method. Restor. Ecol. 2023, 31, e13973. [Google Scholar] [CrossRef]
- Hooshyar, M.; Kim, S.; Wang, D.; Medeiros, S.C. Wet channel network extraction by integrating LiDAR intensity and elevation data. Water Resour. Res. 2015, 51, 10029–10046. [Google Scholar] [CrossRef]
- Medeiros, S.C.; Hagen, S.C.; Weishampel, J.F. A random forest model based on lidar and field measurements for parameterizing surface roughness in coastal models. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1582–1590. [Google Scholar] [CrossRef]
- Dorn, H.; Vetter, M.; Höfle, B. GIS-Based Roughness Derivation for Flood Simulations: A Comparison of Orthophotos, LiDAR and Crowdsourced Geodata. Remote Sens. 2014, 6, 1739–1759. [Google Scholar] [CrossRef]
- Cobby, D.M.; Mason, D.C.; Horritt, M.S.; Bates, P.D. Two-dimensional hydraulic flood modelling using a finite-element mesh decomposed according to vegetation and topographic features derived from airborne scanning laser altimetry. Hydrol. Process. 2003, 17, 1979–2000. [Google Scholar] [CrossRef]
- Mason, D.C.; Cobby, D.M.; Horritt, M.S.; Bates, P.D. Floodplain friction parameterization in two-dimensional river flood models using vegetation heights derived from airborne scanning laser altimetry. Hydrol. Process. 2003, 17, 1711–1732. [Google Scholar] [CrossRef]
- Arcement, G.J.; Schneider, V.R. Guide for selecting Manning’s roughness co-efficients for natural channels and flood plains / by George J. Arcement, Jr. and Verne R. Schneider; prepared in cooperation with the U.S. Department of Transportation, Federal Highway Administration. In U.S. Geological Survey Water-Supply Paper; Department of the Interior, U.S. Geological Survey: Denver, CO, USA, 1989; p. 2339, For sale by the Books and Open-File Reports Section, 1989. [Google Scholar]
- Butler, H.; Chambers, B.; Hartzell, P.; Glennie, C. PDAL: An open source library for the processing and analysis of point clouds. Comput. Geosci. 2021, 148, 104680. [Google Scholar] [CrossRef]
- PDAL Contributors. PDAL Point Data Abstraction Library. 2022. Available online: https://zenodo.org/records/8436666 (accessed on 22 September 2023).
- Pingel, T.J.; Clarke, K.C.; McBride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Lettau, H. Note on Aerodynamic Roughness-Parameter Estimation on the Basis of Roughness-Element Description. J. Appl. Meteorol. 1969, 8, 828–832. [Google Scholar] [CrossRef]
- Emmanuel, E.D.; Lenhart, C.F.; Weintraub, M.N.; Doro, K.O. Estimating Soil Properties Distribution at a Restored Wetland Using Electromagnetic Imaging and Limited Soil Core Samples. Wetlands 2023, 43, 39. [Google Scholar] [CrossRef]
- Luo, S.; Wang, C.; Pan, F.; Xi, X.; Li, G.; Nie, S.; Xia, S. Estimation of wetland vegetation height and leaf area index using airborne laser scanning data. Ecol. Indic. 2015, 48, 550–559. [Google Scholar] [CrossRef]
- Yang, R.-M.; Guo, W.-W. Modelling of soil organic carbon and bulk density in invaded coastal wetlands using Sentinel-1 imagery. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101906. [Google Scholar] [CrossRef]
- Williams, A.A.; Eastman, S.F.; Eash-Loucks, W.E.; Kimball, M.E.; Lehmann, M.L.; Parker, J.D. Record Northernmost Endemic Mangroves on the United States Atlantic Coast with a Note on Latitudinal Migration. Southeast. Nat. 2014, 13, 56–63. [Google Scholar] [CrossRef]
- Osland, M.J.; Day, R.H.; Hall, C.T.; Feher, L.C.; Armitage, A.R.; Cebrian, J.; Dunton, K.H.; Hughes, A.R.; Kaplan, D.A.; Langston, A.K.; et al. Temperature thresholds for black mangrove (Avicennia germinans) freeze damage, mortality and recovery in North America: Refining tipping points for range expansion in a warming climate. J. Ecol. 2019, 108, 654–665. [Google Scholar] [CrossRef]
- Wolanski, E.; Jones, M.; Bunt, J. Hydrodynamics of a tidal creek-mangrove swamp system. Mar. Freshw. Res. 1980, 31, 431–450. [Google Scholar] [CrossRef]
- Liu, W.-C.; Hsu, M.-H.; Wang, C.-F. Modeling of Flow Resistance in Mangrove Swamp at Mouth of Tidal Keelung River, Taiwan. J. Waterw. Port Coast. Ocean Eng. 2003, 129, 86–92. [Google Scholar] [CrossRef]
- Urish, D.W.; Wright, R.M.; Feller, I.C.; Rodriguez, W. Dynamic Hydrology of a Mangrove Island: Twin Cays, Belize. Smithson. Contrib. Mar. Sci. 2009, 38, 473–490. [Google Scholar]
- Homer, C.; Dewitz, J.; Fry, J.; Coan, M.; Hossain, N.; Larson, C.; Herold, N.; McKerrow, A.; VanDriel, J.N.; Wickham, J. Completion of the 2001 National Land Cover Database for the Conterminous United States. Photogramm. Eng. Remote Sens. 2007, 73, 337–341. [Google Scholar]
- Deb, M.; Ferreira, C.M. Simulation of cyclone-induced storm surges in the low-lying delta of Bangladesh using coupled hydrodynamic and wave model (SWAN + ADCIRC). J. Flood Risk Manag. 2016, 11, S750–S765. [Google Scholar] [CrossRef]
- Mattocks, C.; Forbes, C. A real-time, event-triggered storm surge forecasting system for the state of North Carolina. Ocean Model. 2008, 25, 95–119. [Google Scholar] [CrossRef]
- Chen, Q.; Li, Y.; Kelly, D.M.; Zhang, K.; Zachry, B.; Rhome, J. Improved modeling of the role of mangroves in storm surge attenuation. Estuar. Coast. Shelf Sci. 2021, 260, 107515. [Google Scholar] [CrossRef]
- Steyaert, L.T.; Knox, R.G. Reconstructed historical land cover and biophysical parameters for studies of land-atmosphere interactions within the eastern United States. J. Geophys. Res. Atmos. 2008, 113, D02101. [Google Scholar] [CrossRef]
- Enwright, N.M.; Cheney, W.C.; Evans, K.O.; Thurman, H.R.; Woodrey, M.S.; Fournier, A.M.; Gesch, D.B.; Pitchford, J.L.; Stoker, J.M.; Medeiros, S.C. Elevation-based probabilistic mapping of irregularly flooded wetlands along the northern Gulf of Mexico coast. Remote Sens. Environ. 2023, 287, 113451. [Google Scholar] [CrossRef]
- Meyer, H.; Pebesma, E. Machine learning-based global maps of ecological variables and the challenge of assessing them. Nat. Commun. 2022, 13, 2208. [Google Scholar] [CrossRef] [PubMed]







| RF Model | Max_Depth | Max_Features | Min_Samples_Leaf | n_Estimators |
|---|---|---|---|---|
| Manning’s n | 5 | 0.3 | 2 | 1601 |
| z0 | 3 | 0.3 | 2 | 1601 |
| Site | d84 (mm) | nb | n1 | n3 | n4 | n |
|---|---|---|---|---|---|---|
| CKEY | 3.51 | 0.019 | 0.005 | 0.025 | 0.074 | 0.123 |
| IEPK | 16.2 | 0.024 | 0.007 | 0.029 | 0.053 | 0.113 |
| PKEY | 12.8 | 0.023 | 0.006 | 0.030 | 0.088 | 0.147 |
| Site | H* (m) | S* (m3) | A* (m3) | z0 (m) |
|---|---|---|---|---|
| CKEY | 8.60 | 571 | 1100 | 2.23 |
| IEPK | 10.9 | 637 | 1500 | 2.31 |
| PKEY | 9.01 | 606 | 1100 | 2.48 |
| Site | σG(m) | σNG(m) | HNG (m) | n | z0(m) |
|---|---|---|---|---|---|
| CKEY | 0.162 | 1.607 | 3.214 | 0.123 | 2.23 |
| IEPK | 0.231 | 2.077 | 4.193 | 0.113 | 2.31 |
| PKEY | 0.170 | 1.765 | 3.368 | 0.147 | 2.48 |
| Model | MAE (m) | RMSE (m) | R2 |
|---|---|---|---|
| n w/o mangrove sites | 0.010 | 0.012 | 0.086 |
| n with mangrove sites | 0.016 | 0.022 | 0.516 |
| z0 w/o mangrove sites | 0.730 | 1.121 | 0.009 |
| z0 with mangrove sites | 0.664 | 0.984 | 0.310 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Medeiros, S.C. Hydraulic Bottom Friction and Aerodynamic Roughness Coefficients for Mangroves in Southwest Florida, USA. J. Mar. Sci. Eng. 2023, 11, 2053. https://doi.org/10.3390/jmse11112053
Medeiros SC. Hydraulic Bottom Friction and Aerodynamic Roughness Coefficients for Mangroves in Southwest Florida, USA. Journal of Marine Science and Engineering. 2023; 11(11):2053. https://doi.org/10.3390/jmse11112053
Chicago/Turabian StyleMedeiros, Stephen C. 2023. "Hydraulic Bottom Friction and Aerodynamic Roughness Coefficients for Mangroves in Southwest Florida, USA" Journal of Marine Science and Engineering 11, no. 11: 2053. https://doi.org/10.3390/jmse11112053