
Simulation and Experimental Research on the Failure of Marine Sliding Bearings
Abstract
:1. Introduction
2. Simulation Model
2.1. Assumption
- (1)
- The body force of the lubricating fluid is ignored;
- (2)
- It is modified. The lubricating fluid does not slide on the interface, that is, the relative velocity between the interface fluid and the surface is zero;
- (3)
- The fluid pressure and viscosity remain unchanged in the thickness direction of the lubricating oil film;
- (4)
- The thickness of the lubricating oil film is much smaller than the radius of curvature of the surface of the friction pair, so the influence of the oil film curvature is ignored;
- (5)
- The flow is laminar, and there is no turbulence in the lubricating oil film;
- (6)
- The inertial force of the lubricating fluid is ignored.
2.2. Average Reynolds Equation
2.3. Oil Film Geometric Equation
2.4. Rough Contact Model
2.5. Friction
2.6. Boundary Conditions
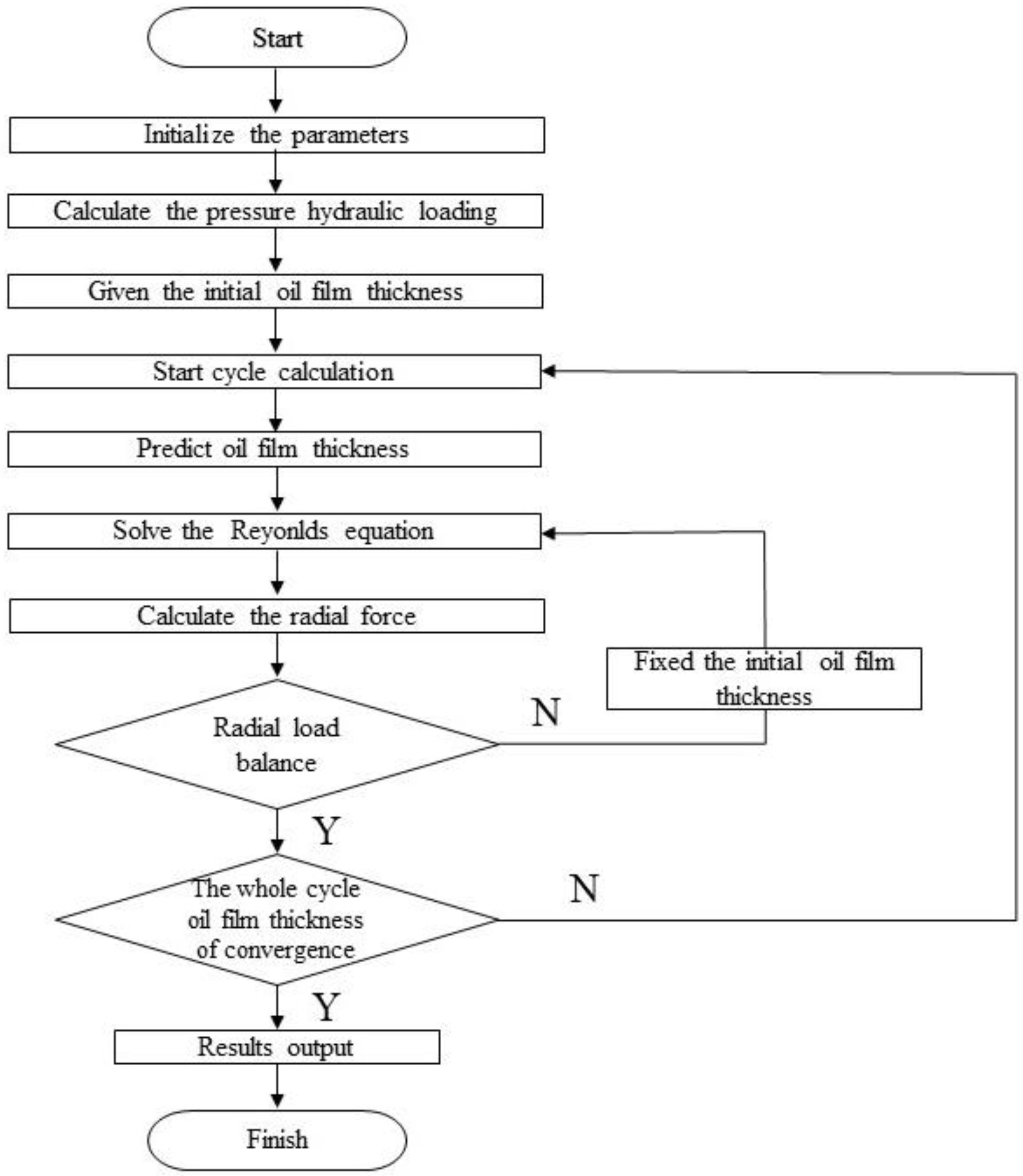
2.7. Calculation Process
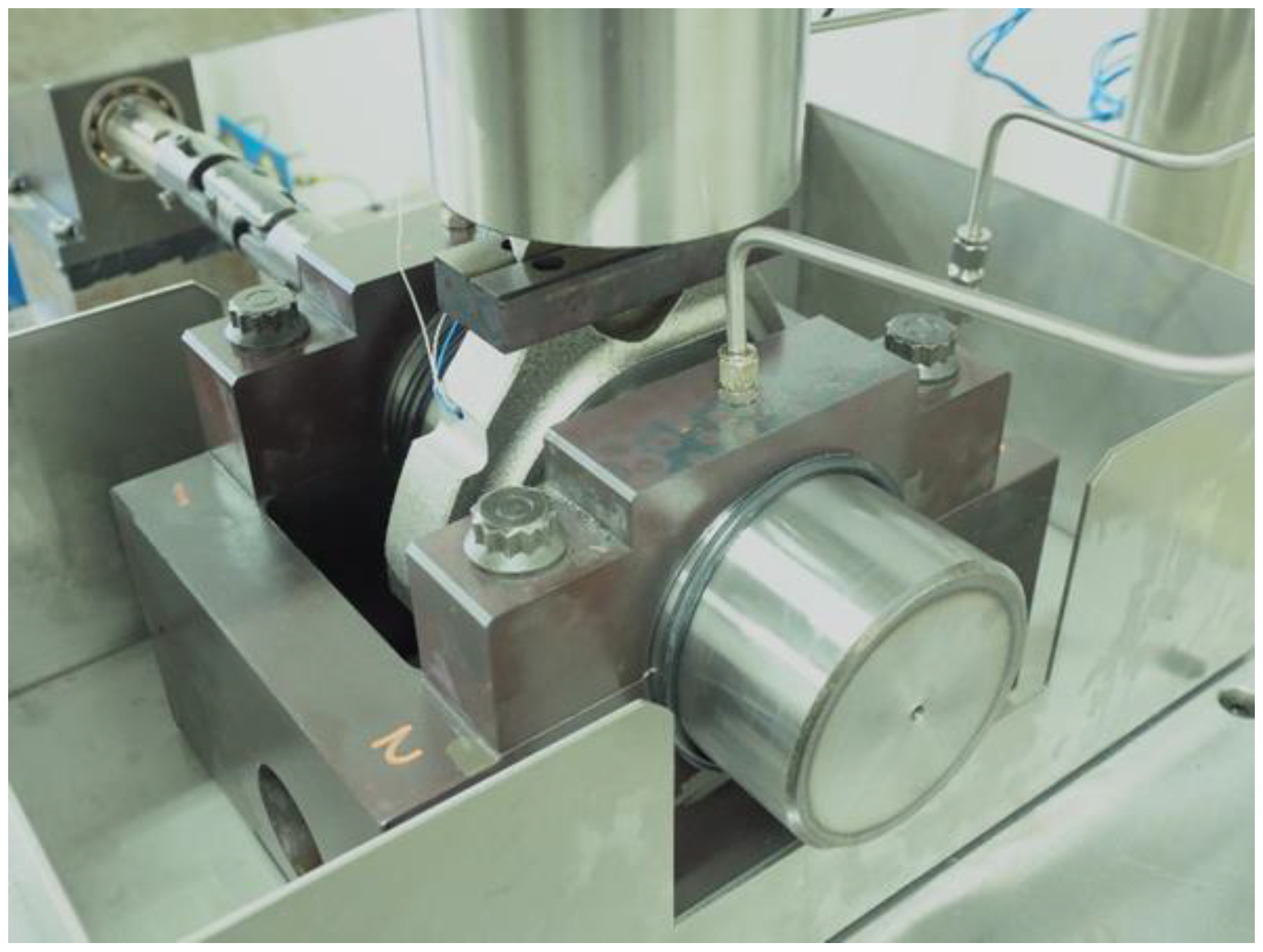
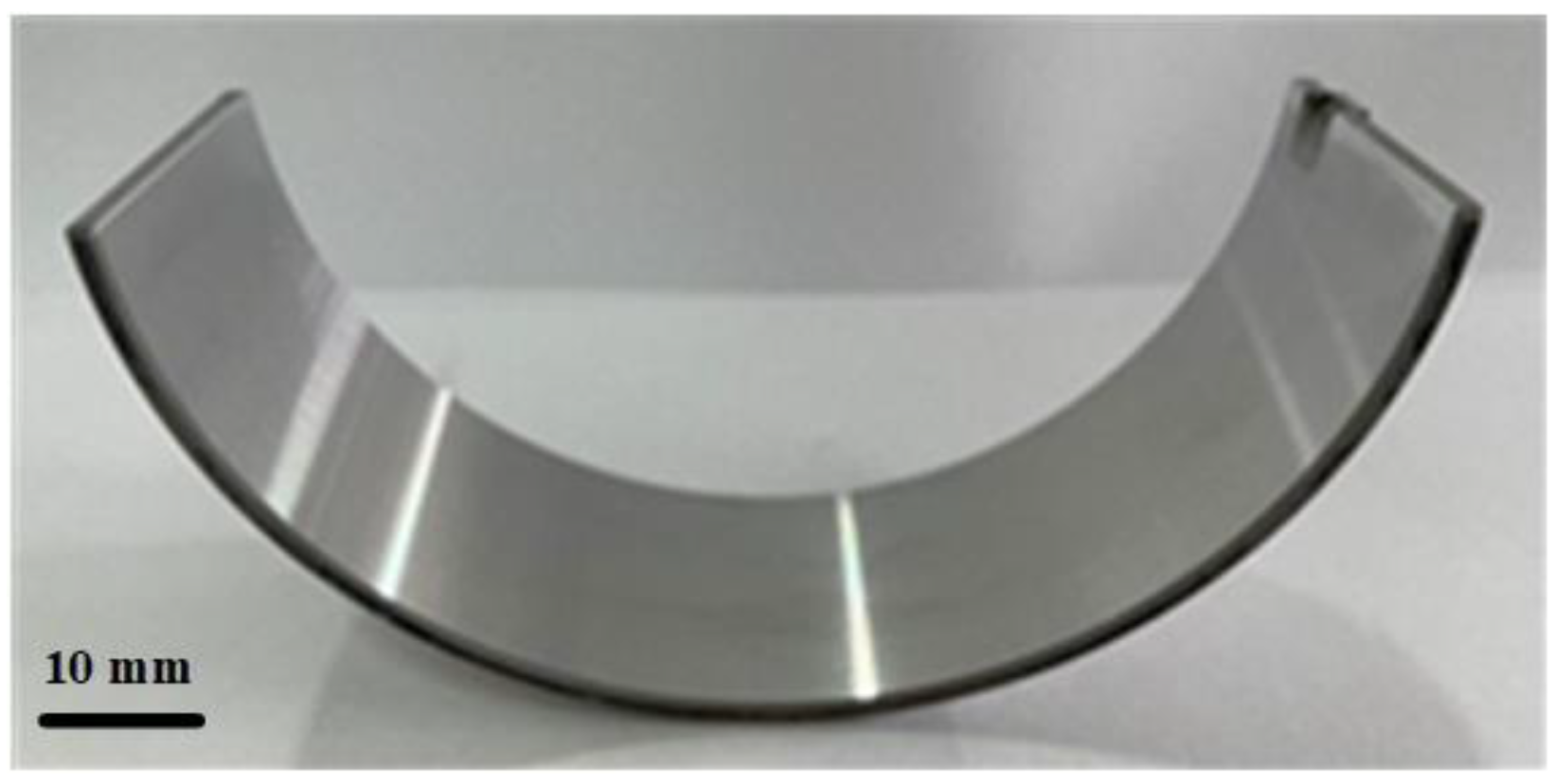
3. Experimental Details
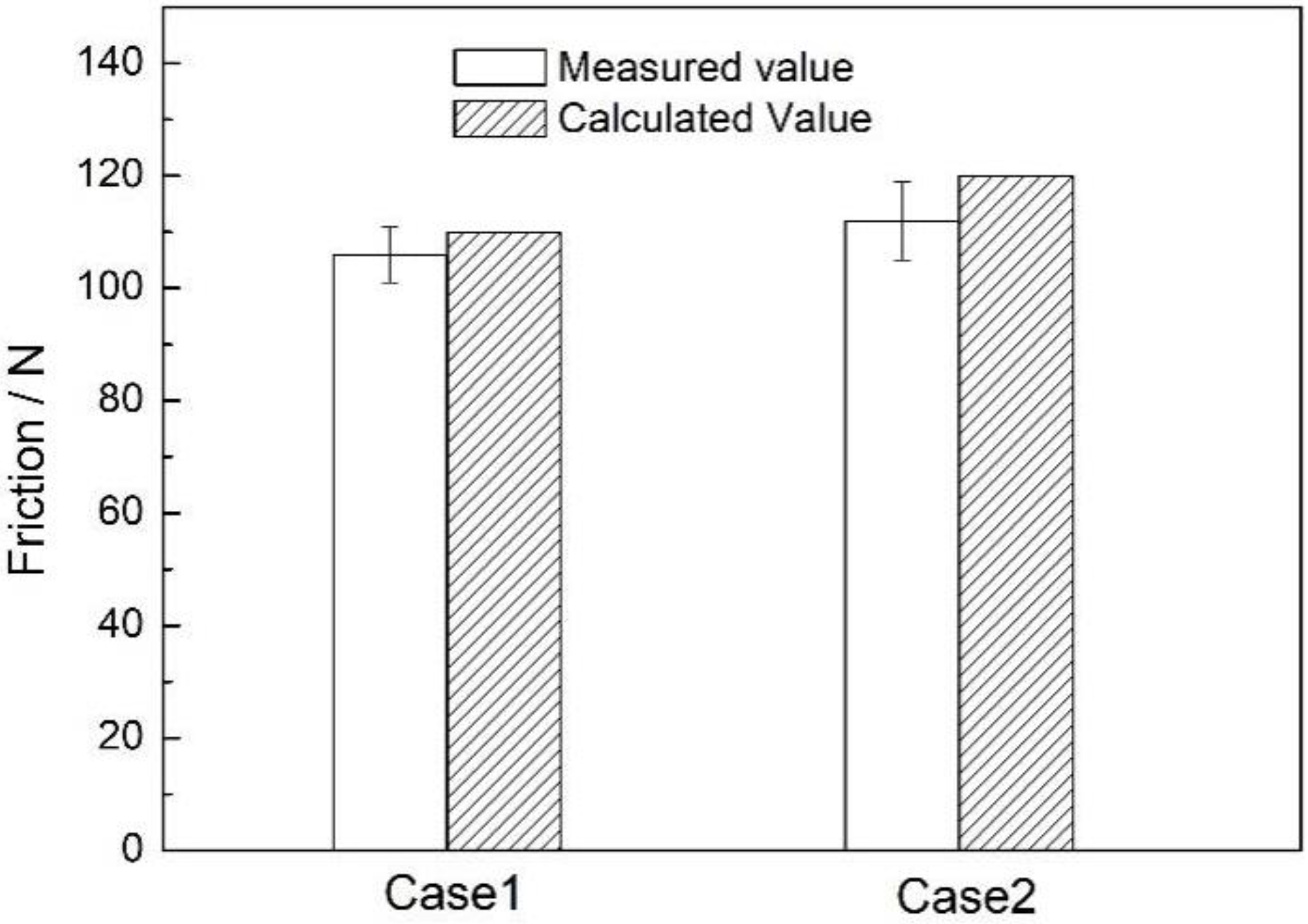
4. Validation
5. Experimental Results and Mechanisms
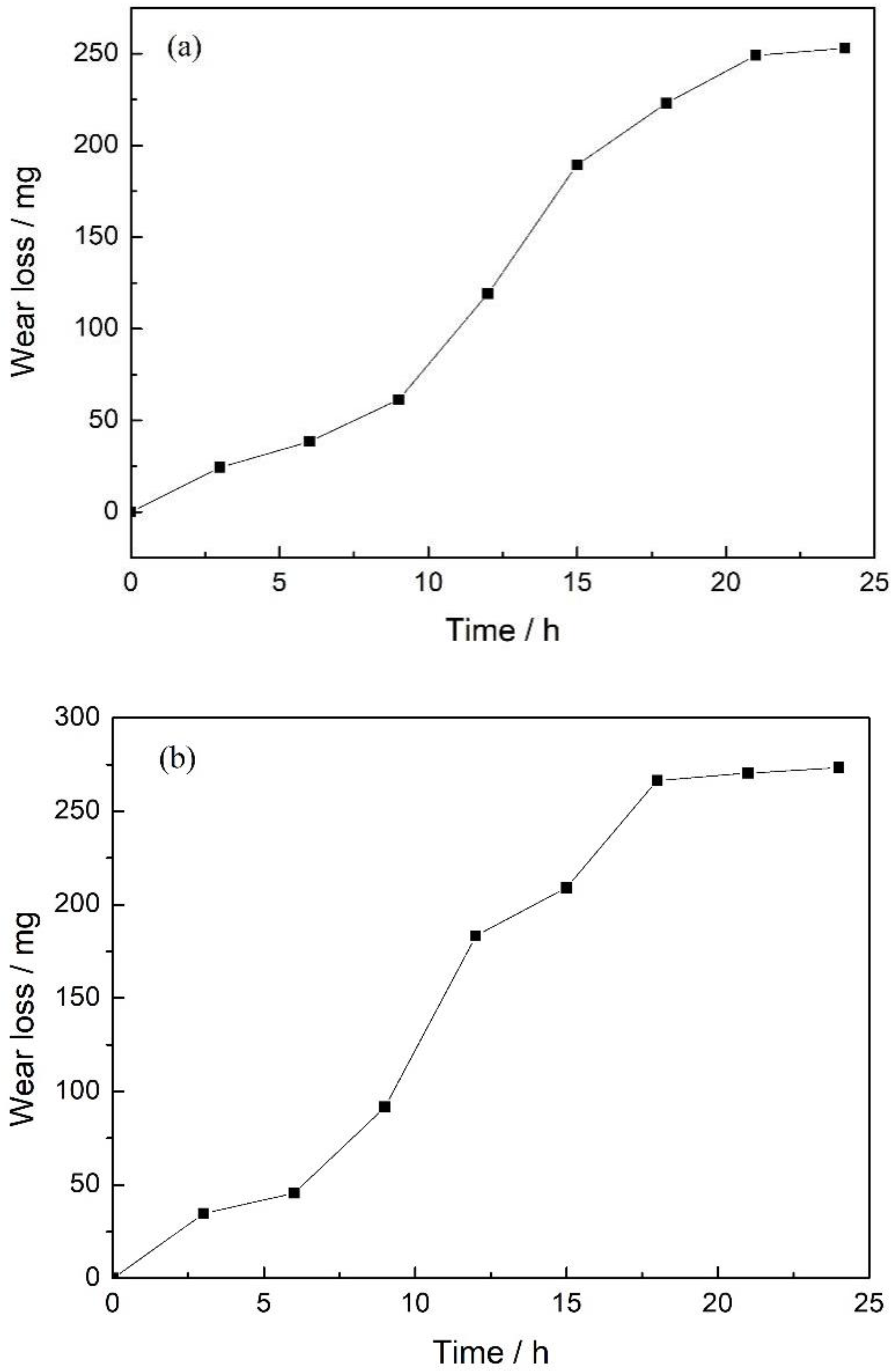
5.1. Wear Loss
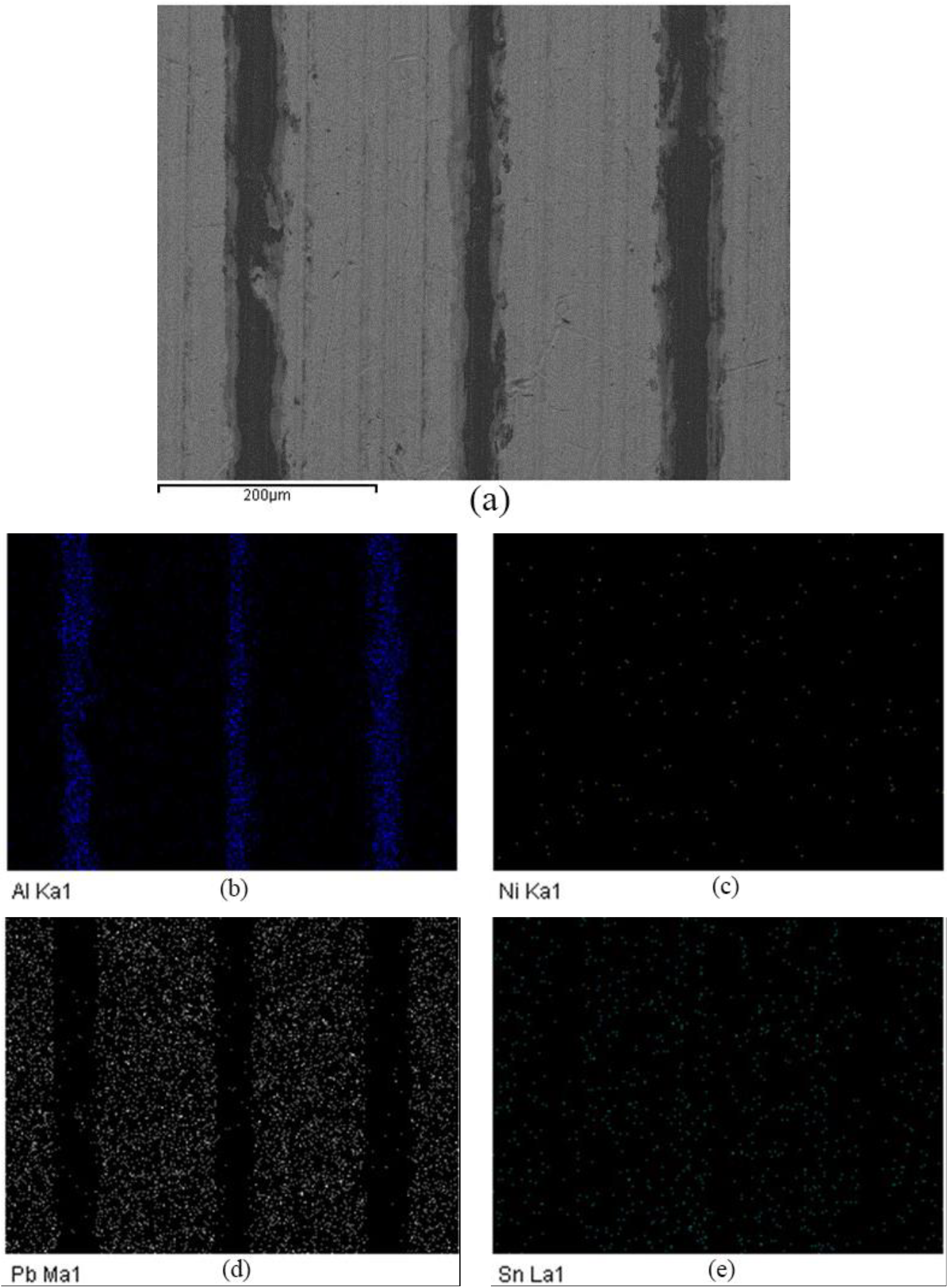
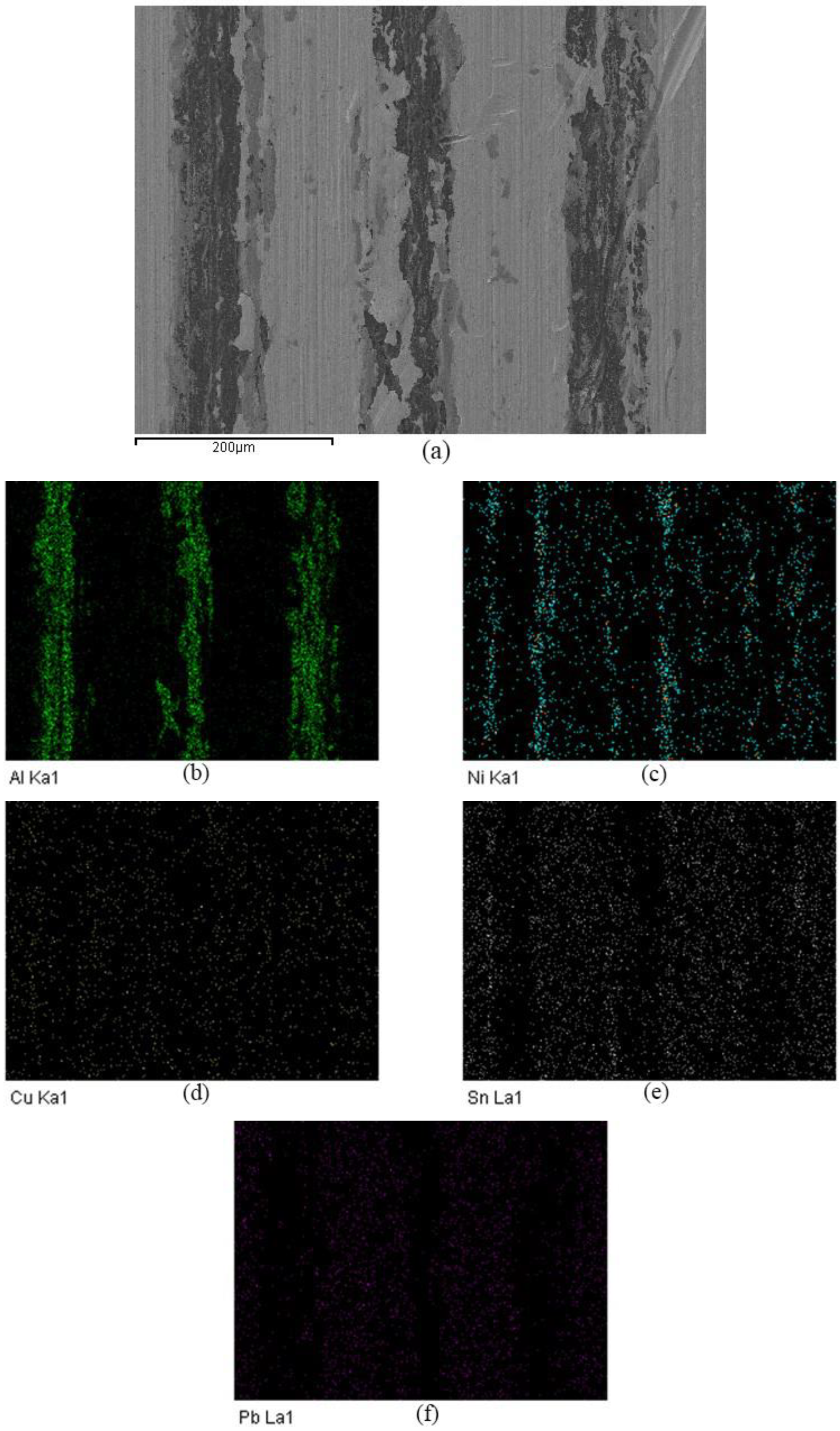
5.2. Wear Mechanisms
6. Conclusions
- (1)
- The errors between the calculated average friction and the measured average friction are within 10%, which proves the correctness of the simulation model.
- (2)
- Through 24 wear tests, the wear loss of the sliding bearing is larger at the initial stage because the asperities on the surface of the sliding bearing and the shaft surface are in contact with each other, and it tends to become gentle after the running-in period.
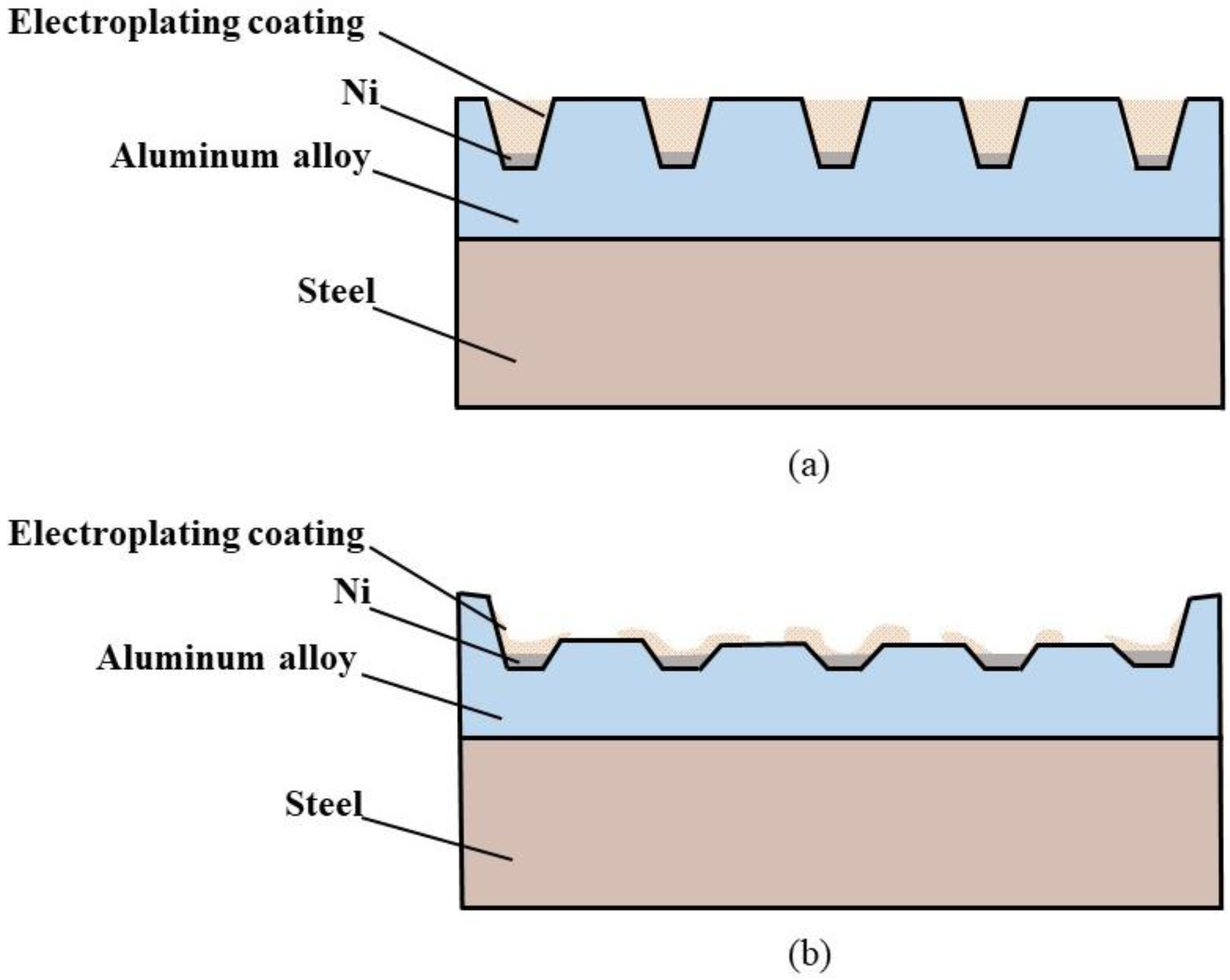
- (3)
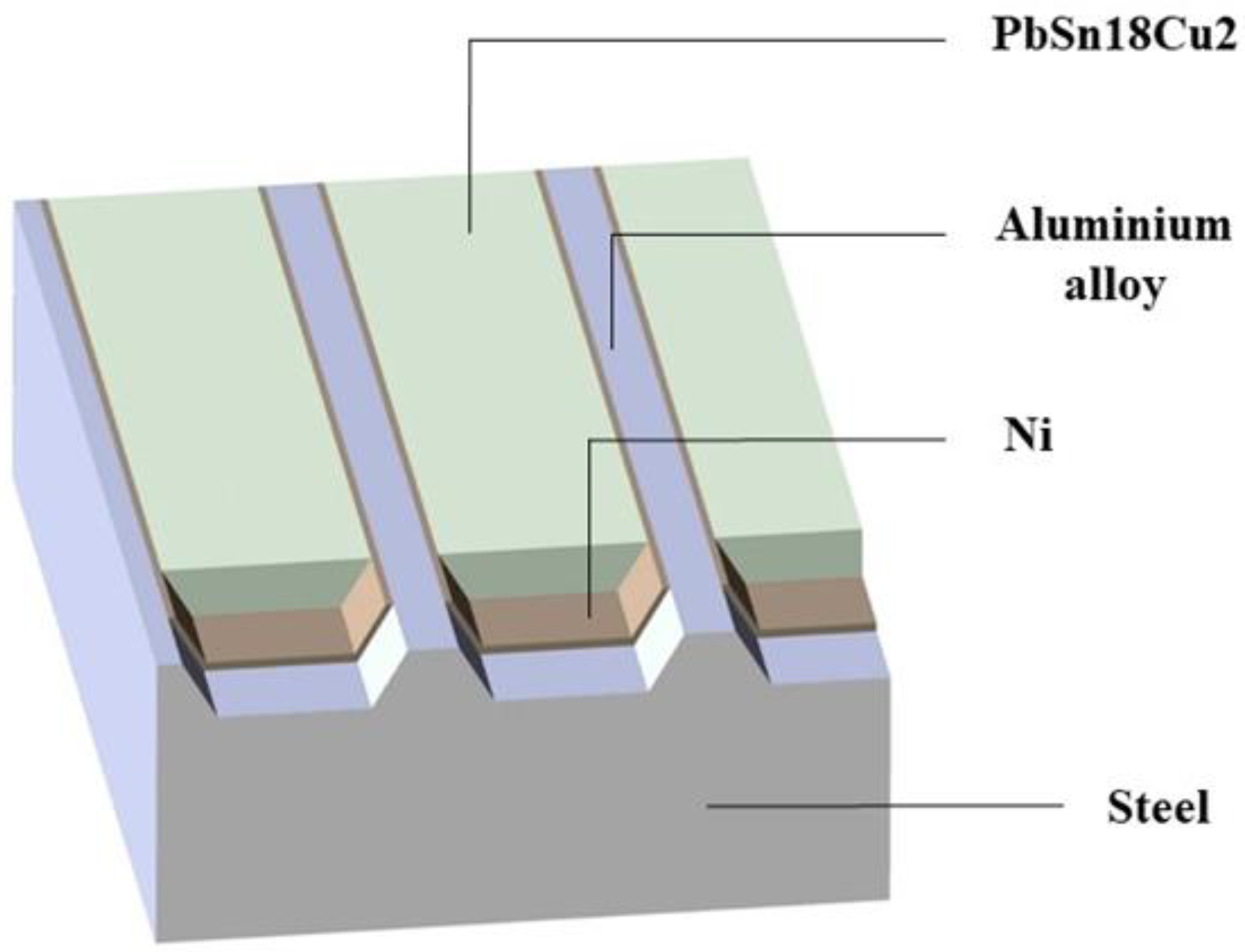
- After wear, the groove structure remains, the height of the groove boss decreases, and the cross-sectional area becomes slightly wider. The ternary alloy in the groove will be taken out of the groove, and its edge will undergo plastic flow and adhere to the surface of the aluminum alloy. The research on the wear mechanism can provide guidance for the improvement of wear resistance technology.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Item | Meaning |
| h | nominal lubricant film thickness |
| σ | root mean square of surface roughness |
| ϕx | the pressure flow factor in the x-direction |
| ϕy | the pressure flow factor in the y-direction |
| ϕs | the shear flow facto |
| ϕc | the dimensionless contact factor |
| h | the nominal oil film thickness |
| u | the actual viscosity |
| t | time |
| h0 | the minimum oil film thickness |
| hx | the incremental value of the bearing oil film thickness in the x-direction |
| hy | the incremental value of the bearing oil film thickness in the y-direction |
| hT | the actual oil film thickness |
| δ1 | the random roughness height of the shaft |
| δ2 | the random roughness height of the bearing surface |
| T0 | the reference temperature |
| T | the actual temperature |
| u0 | the viscosity at T0 |
| p | the actual pressure of the lubricating oil |
| Z | the viscosity-pressure index |
| S | the viscosity-temperature index |
| γ | the direction of bearing surface roughness |
| γ1 | the grain direction parameters of the surface roughness of the shaft |
| γ2 | the grain direction parameters of the surface roughness of the bearing |
| pasp | the contact pressure of the rough asperity |
| Ac | the actual contact area of the rough surface |
| A | the nominal contact area |
| E1 | the elastic modulus of bearing bush |
| E2 | the elastic modulus of shaft |
| E’ | the comprehensive elastic modulus |
| v1 | the Poisson’s ratio of the bearing bush |
| v2 | the Poisson’s ratio of the shaft |
| H | the film thickness ratio |
| Fc | the rough contact friction |
| Fv | the fluid lubrication friction |
| τc | the rough contact shear stress |
| τv | the fluid lubrication shear stress |
| x | the axial direction |
| y | the radial direction |
| d | the diameter of the sliding bearing |
| l | the width of the sliding bearing |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| h0 | 10 μm |
| δ1 | 0.8 μm |
| δ2 | 0.8 μm |
| E1 | 1.7 × 1011 Pa |
| E2 | 2 × 1011 Pa |
| v1 | 0.25 |
| v2 | 0.29 |
| d | 100 mm |
| l | 30 mm |
| Load | 2,3 tons |
| Speed | 100 r/min |
| Oil temperature | 90 °C |
| u0 | 0.08 Pa·s |
| S | 1.1 |
| Z | 0.68 |
| T0 | 25 °C |
| T | 90 °C |
| γ1 | 1 |
| γ2 | 1 |
| A1 | 1.899 |
| A2 | 1.126 |
| a | 0.98 |
| b | 0.98 |
| c | 0.05 |
References
- Zhu, J.X.; Li, H.C.; Wei, S.J.; Fu, J.F.; Xu, X. An approach of simulating journal bearings-gear pump system including components’ cavitation. Simulaiton Model. Pract. Theory 2021, 108, 102236. [Google Scholar] [CrossRef]
- Yang, C.Y.; Wang, S.J.; Lin, C.K.; Chung, L.L.; Liou, M.C. Analytical and experimental study on sloped sliding-type bearings. Struct. Control Health Monit. 2021, 28, e2828. [Google Scholar] [CrossRef]
- Brenkacz, L.; Witanowski, L.; Drosinska-Komor, M.; Szewczuk-Krypa, N. Research and applications of active bearings: A state-of-the-art review. Mech. Syst. Signal Process. 2021, 151, 107423. [Google Scholar] [CrossRef]
- Li, H.; Liu, H.; Qi, S.M.; Liu, Y. A high-speed rolling bearing test rig supported by sliding bearing. Ind. Lubr. Tribol. 2020, 72, 955–959. [Google Scholar] [CrossRef]
- Chen, G.; Qu, M.J. Modeling and analysis of fit clearance between rolling bearing outer ring and housing. J. Sound Vib. 2019, 438, 419–440. [Google Scholar] [CrossRef]
- Chiang, H.W.D.; Kuan, C.P.; Li, H.L. Turbomolecular pump rotor-bearing system analysis and testing. J. Vac. Sci. Technol. A 2009, 27, 1196–1203. [Google Scholar] [CrossRef]
- Lin, Q.X.; Jiang, D.H.; Deng, Z.G.; Ma, G.T.; Zheng, J.; Wang, W.J.; Shin, D.I.; Gu, X.; Lin, N.; Shao, M.L. Operation and improvement of liquid nitrogen pumps with radial high-temperature superconductor bearings. J. Low Temp. Phys. 2015, 180, 416–424. [Google Scholar] [CrossRef]
- Zeng, X.K.; Zhou, H.H.; Xiong, W.Y. CFD study on cavitation abrasion for axletree of main pump of tianwan NPP. Nucl. Power Eng. 2016, 37, 4–8. [Google Scholar] [CrossRef]
- Iwata, T.; Oikawa, M.; Chida, R.; Ishii, D.; Ogihara, H.; Mihara, Y.; Kano, M. Excellent seizure and friction properties achieved with a combination of an a-C:H:Si DLC-coated journal and an aluminum alloy plain bearing. Coatings 2021, 11, 1055. [Google Scholar] [CrossRef]
- Henry, Y.; Bouyer, J.; Fillon, M. Experimental analysis of the hydrodynamic effect during start-up of fixed geometry thrust bearings. Tribol. Int. 2018, 120, 299–308. [Google Scholar] [CrossRef]
- Jang, J.Y.; Khonsari, M.M.; Pascovici, M.D. Modeling aspects of a rate-controlled seizure in an unloaded journal bearing. Tribol. Trans. 1998, 41, 481–488. [Google Scholar] [CrossRef]
- Pathak, J.P.; Torabian, H.; Tiwari, S.N. Antiseizure and antifriction characteristics of Al-Si-Pb alloys. Wear 1997, 202, 134–141. [Google Scholar] [CrossRef]
- Li, S. Transient Coupling Study of Dynamics and Tribology on Sliding Bearing. Master’s Thesis, Harbin Engineering University, Harbin, China, 2017. [Google Scholar]
- Luo, Z. Analysis of Fluid-Structure Interaction Heat Transfer of Hydrodynamic Journal Bearing Considering Thermohydrodynamic. Master’s Thesis, Xiangtan University, Xiangtan, China, 2016. [Google Scholar]
- Xie, Y.; Zhang, B.; Hu, Y.M.; Ruan, D.F. Effect of journal rotation speed on characteristic of oil film and structure characteristic of bearings. Lubr. Eng. 2015, 40, 8–16. [Google Scholar] [CrossRef]
- Gertzos, K.P.; Nikolakopoulos, P.G.; Papadopoulos, C.A. CFD analysis of journal bearing hydrodynamic lubrication by Bingham lubricant. Tribol. Int. 2008, 41, 1190–1204. [Google Scholar] [CrossRef]
- Song, Y.; Ren, X.; Gu, C.W. Experimental and numerical studies of cavitation effects in a tapered land thrust bearing. J. Tribol. 2015, 137, 011701. [Google Scholar] [CrossRef]
- Patir, N.; Cheng, H.S. An average flow model for determining effects of three-dimensional roughness on partial hydrodynamic lubrication. J. Lubr. Technol. 1978, 100, 12–17. [Google Scholar] [CrossRef]
- Parir, N.; Cheng, H.S. Application of average flow model to lubrication between rough sliding surfaces. J. Lubr. Technol. 1979, 101, 220–230. [Google Scholar] [CrossRef]
- Houpert, L. New results of traction force calculations in elastohydrodynamic contacts. J. Tribol. 1985, 107, 241–245. [Google Scholar] [CrossRef]
- Wang, S.; Cusano, C.; Conry, T. Thermal analysis of elastohydrodynamic lubrication of line contacts using the Ree-Eyring fluid model. J. Tribol. 1991, 113, 232–242. [Google Scholar] [CrossRef] [Green Version]
- Greenwood, J.A.; Tripp, J.H. The Contact of Two Nominally Flat Surfaces. Proc. Inst. Mech. Eng. 1971, 185, 625–633. [Google Scholar] [CrossRef]









| Case | Load | Speed | Oil Temperature | Time |
|---|---|---|---|---|
| Case 1 | 2 t | 100 r/min | 90 °C | 24 h |
| Case 2 | 3 t | 100 r/min | 90 °C | 24 h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, F.; Li, D.; Hao, M.; Yu, Y.; Wang, W. Simulation and Experimental Research on the Failure of Marine Sliding Bearings. J. Mar. Sci. Eng. 2023, 11, 61. https://doi.org/10.3390/jmse11010061
Du F, Li D, Hao M, Yu Y, Wang W. Simulation and Experimental Research on the Failure of Marine Sliding Bearings. Journal of Marine Science and Engineering. 2023; 11(1):61. https://doi.org/10.3390/jmse11010061
Chicago/Turabian StyleDu, Fengming, Dawei Li, Mingxing Hao, Yang Yu, and Weiwei Wang. 2023. "Simulation and Experimental Research on the Failure of Marine Sliding Bearings" Journal of Marine Science and Engineering 11, no. 1: 61. https://doi.org/10.3390/jmse11010061