Study of Safety Auxiliary Facilities to Prevent the Start-Up Failure of Large Axial Flow Pump Systems under Gate Failure Working Conditions


Abstract
:1. Introduction
2. Research Object
2.1. LAPS Model
2.2. Safety Auxiliary Facilities
3. Numerical Schemes and Experimental Setup
3.1. Mathematical Equations and Methods
3.2. Simulation Strategy and Simulation Model
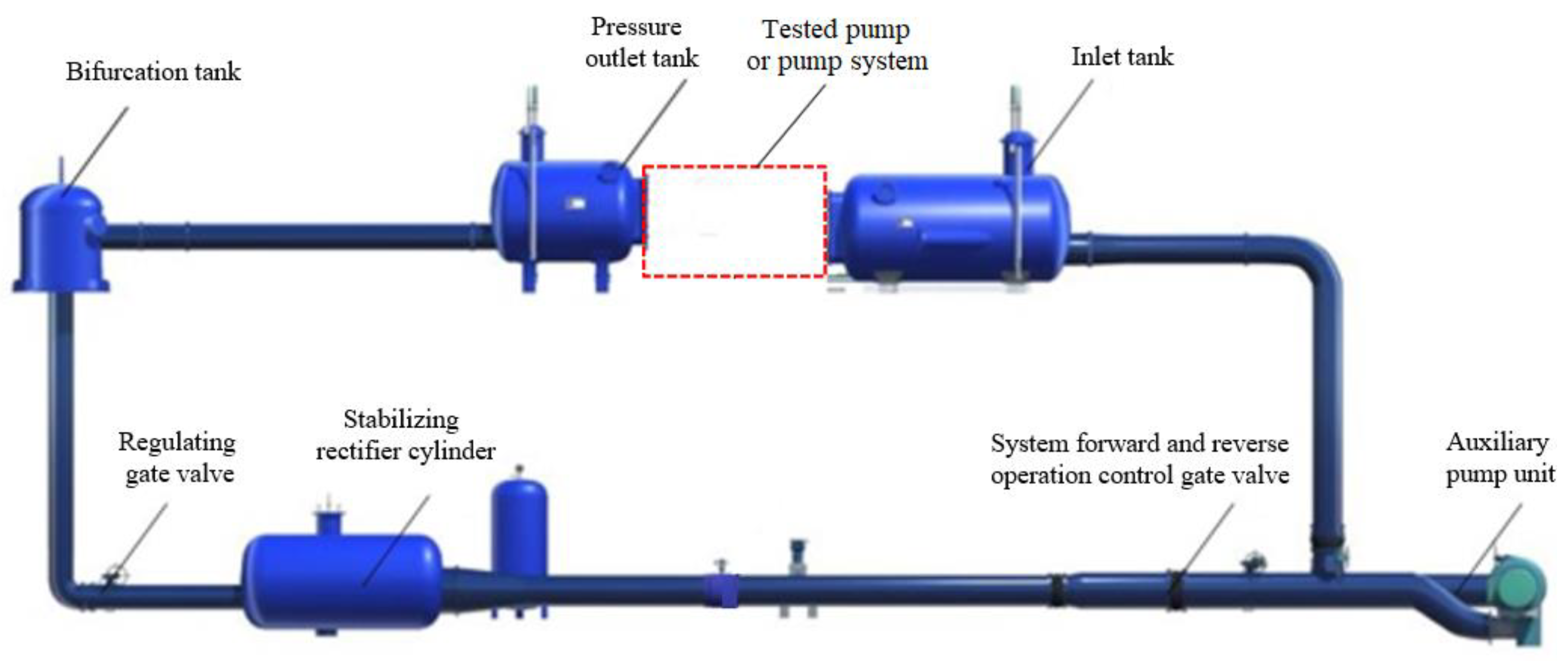
3.3. Experimental Platform and Experimental Model
4. Model Validation
4.1. Steady-State Simulation Verification
4.2. Transient Simulation Verification
5. Results and Discussion
5.1. Gate Refusal Working Condition Equipped with OVHO
5.2. Gate Refusal Working Conditions Equipped with FLVA
5.3. Gate Refusal Working Conditions with Both FLVA and OVHO
5.4. Gate Refusal Working Condition and Limited FLVA Area
5.5. Gate Refusal Working Condition and Limited OVHO Height
5.6. Analysis of Different Safety Auxiliary Facilities to Prevent Starting Failure
6. Conclusions
- Auxiliary OVHO or FLVA equipment can help LAPS in reducing risks that may occur during start-up failure to some extent under gate refusal working conditions. The LAPSs equipped with FLVA or OVHO are basically free from backflow during start-up operations. Moreover, the time periods with respect to FLVA or OVHO assist LAPS’s outflow and are minimally influenced by FLVA’s area or OVHO’s elevation;
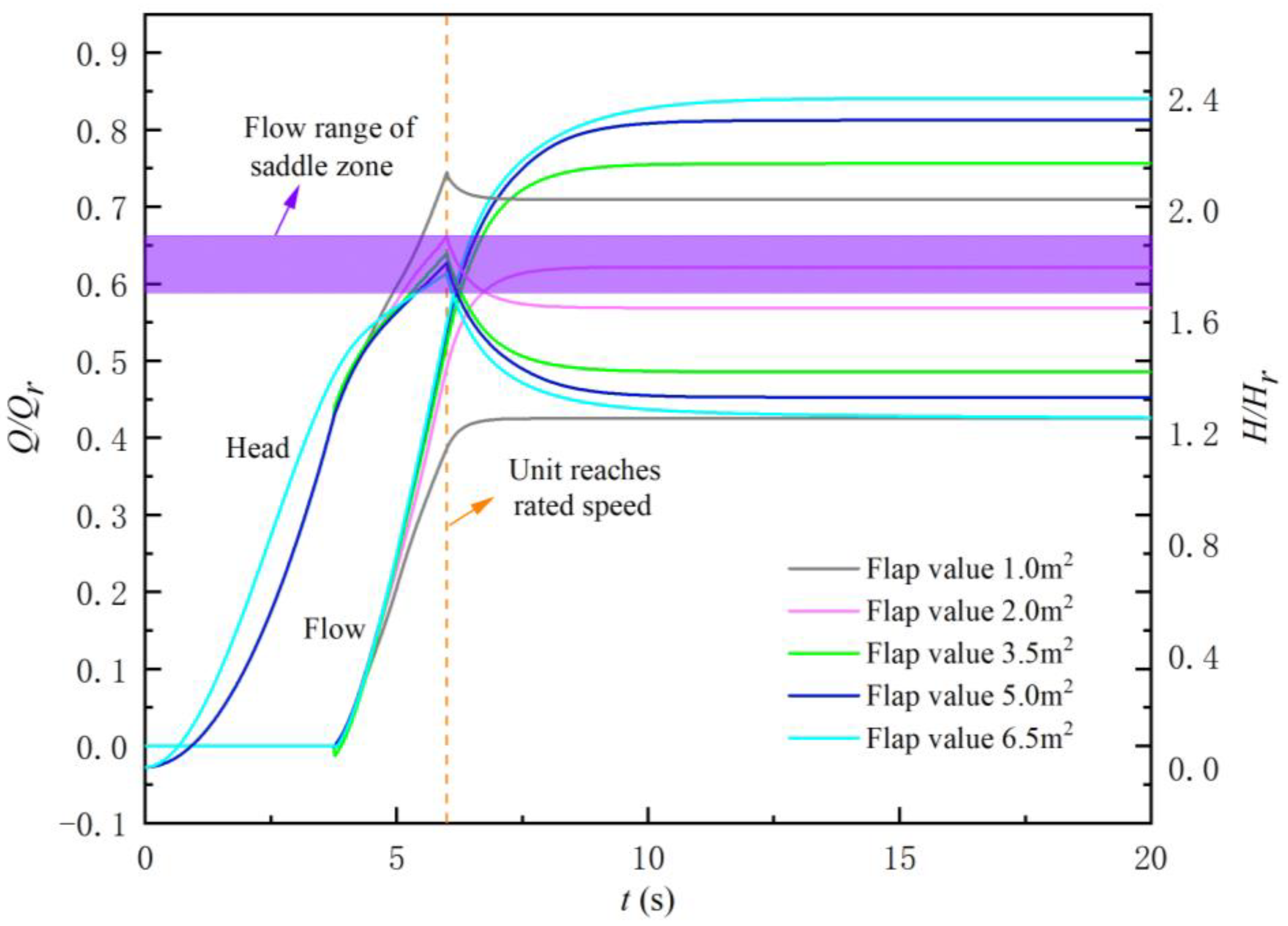
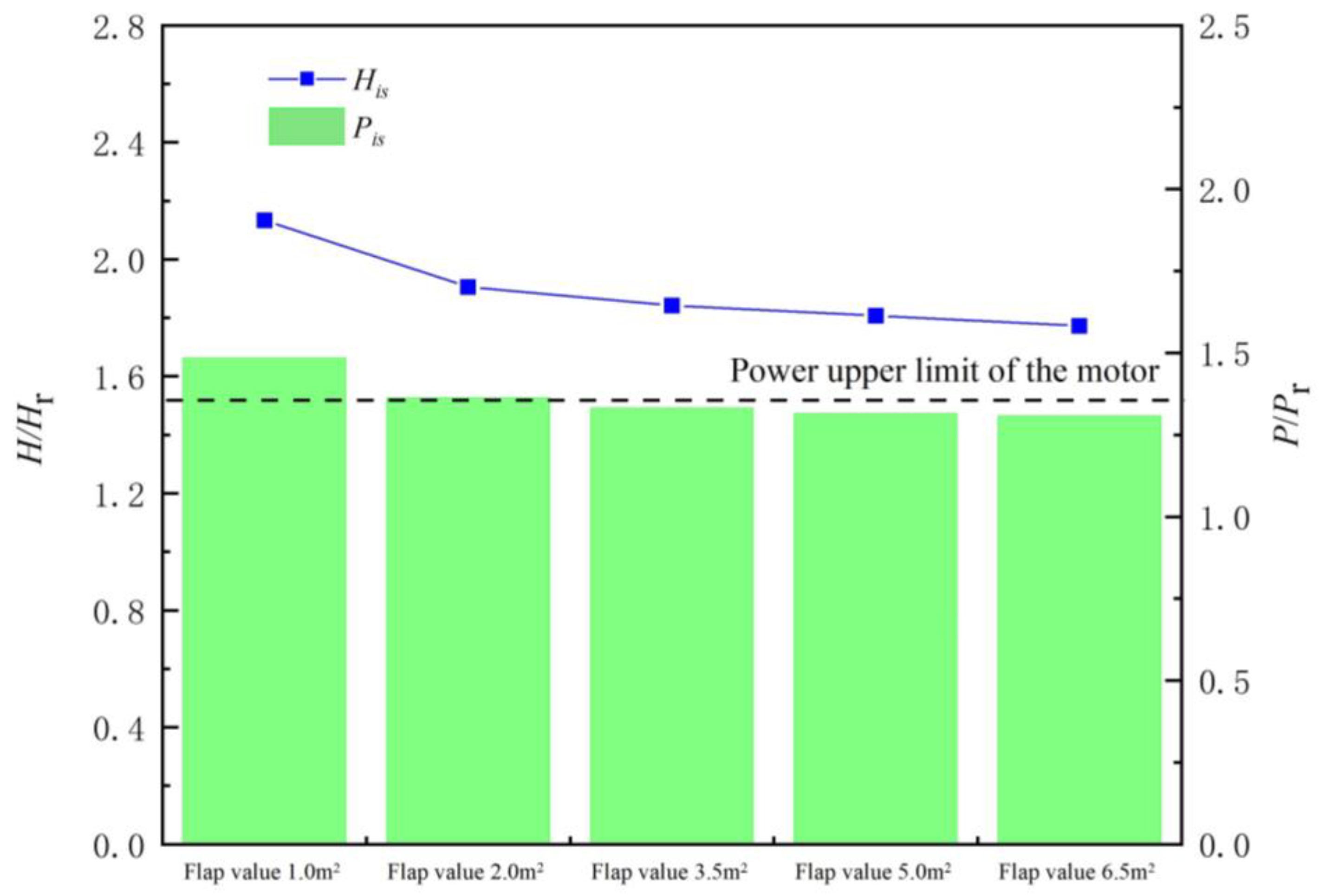
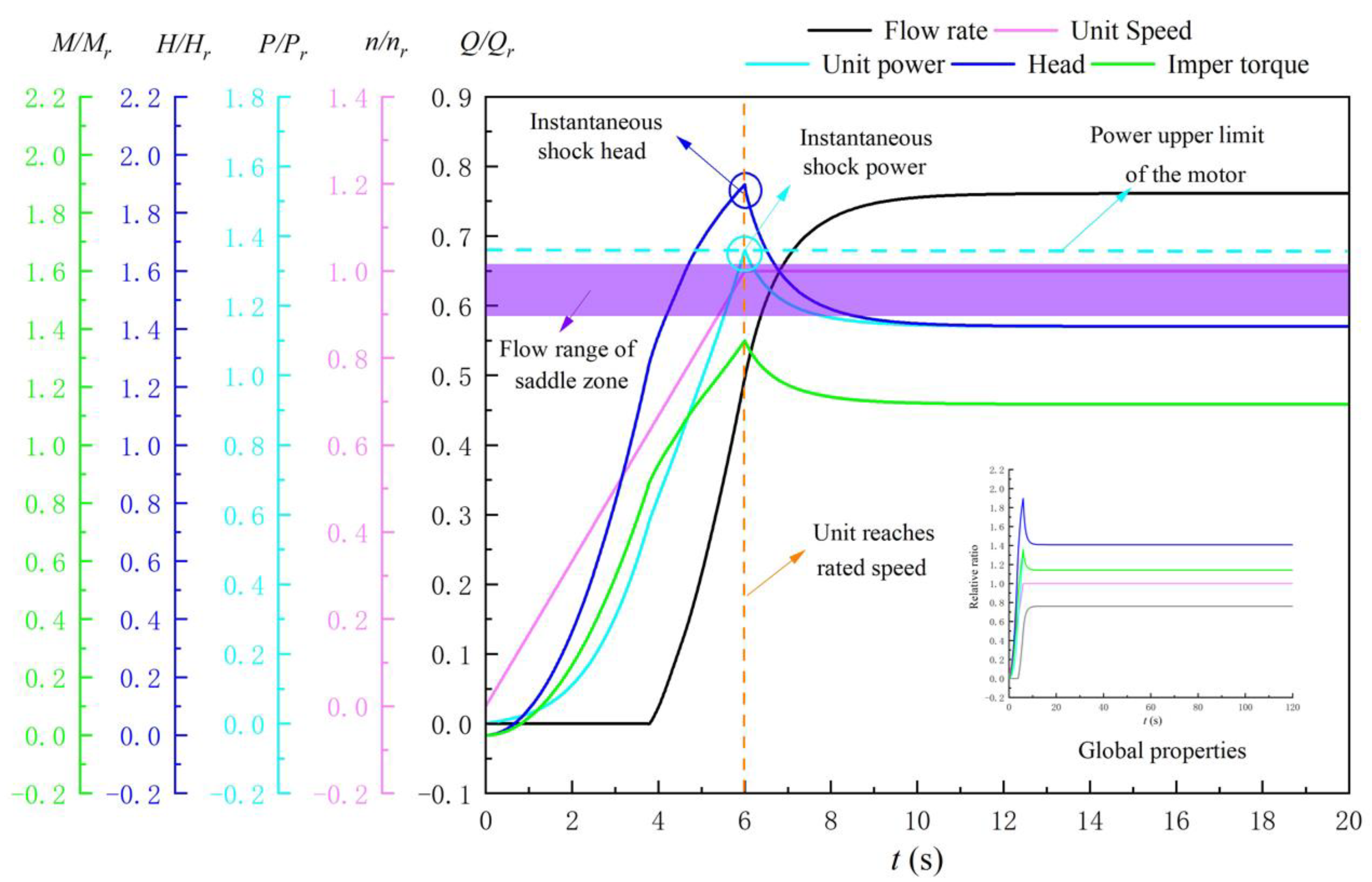
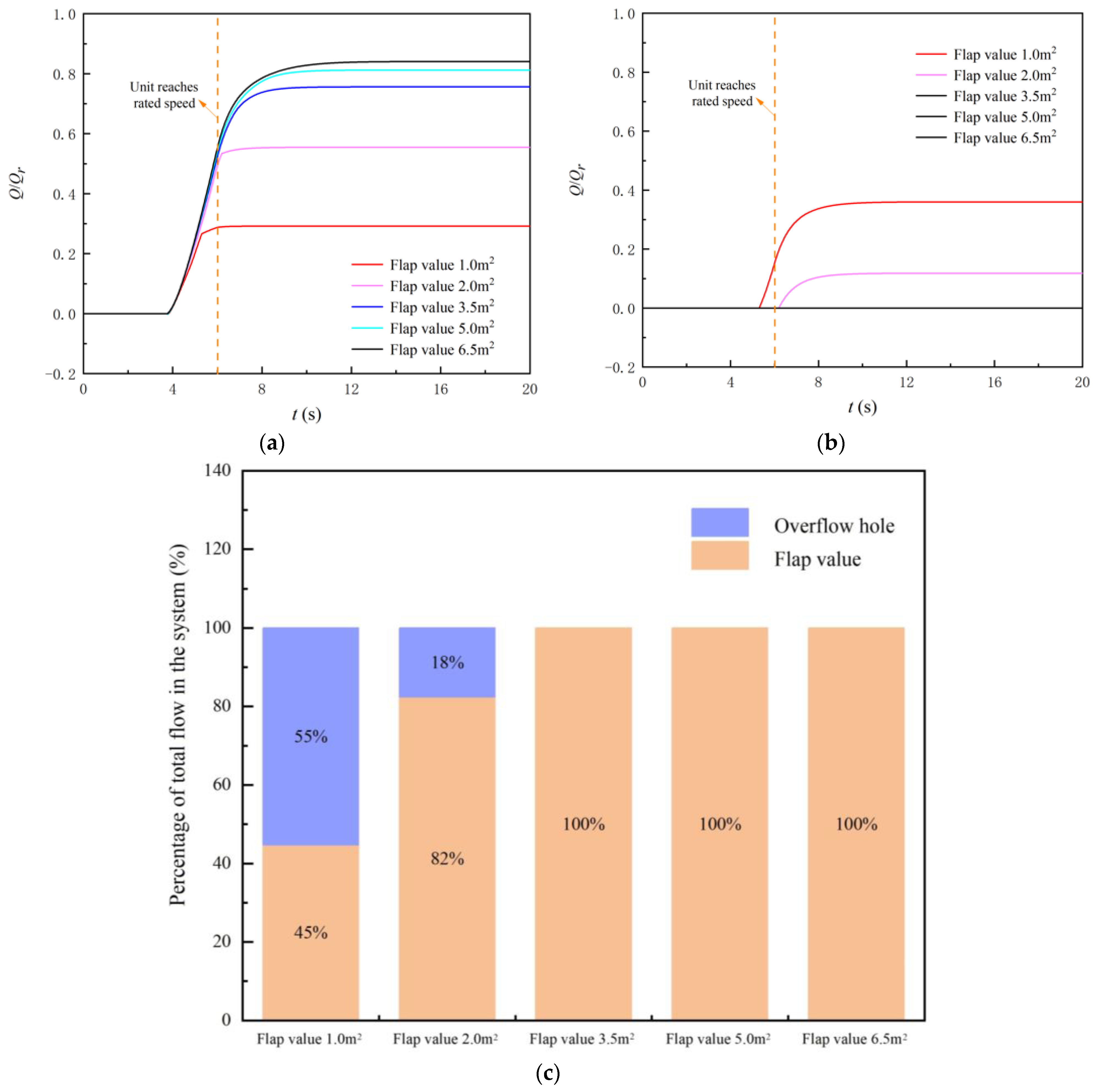
- Under the gate refusal working condition, when Pis during the start-up process is reduced by setting up safety auxiliary facilities, LAPS falls into the saddle area after start-up operations are completed, and the start-up is unstable. When equipped with only one type of safety aid, setting an FLVA measuring 2.0 m2 or 6.75-meter elevation OVHO will cause the flow corresponding to the LAPS’s transition to behave in a steady-state manner and to fall within the flow range of the saddle’s zone;
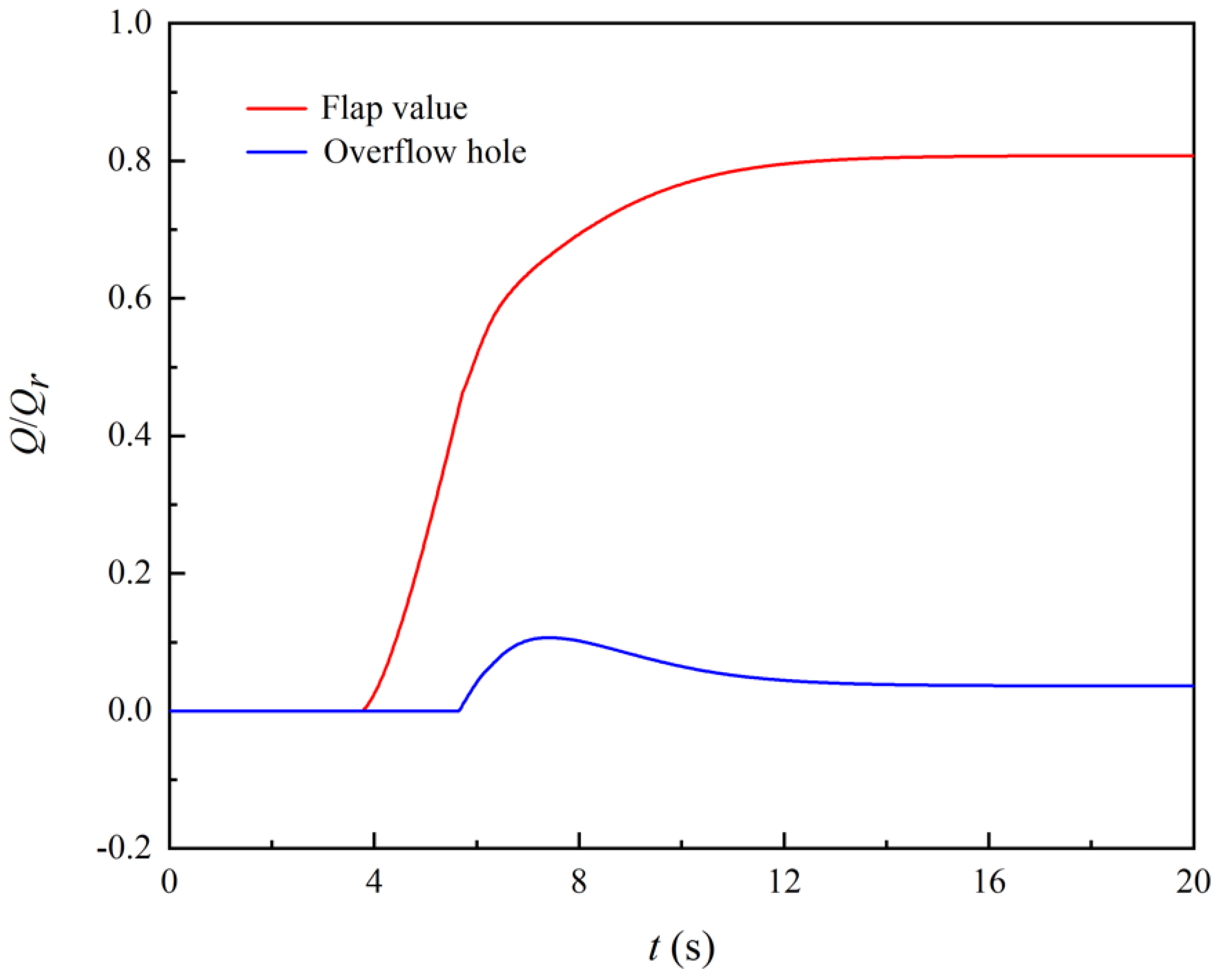
- The FLVA will play the main protective role during the start-up operation of the LAPS if the LAPS is equipped with both an OVHO and FLVA of unrestricted size under the gate refusal condition. The LAPS equipped with OVHO (1.27 Hm) and FLVA (49.1% Ag) and the LAPS equipped with FLVA (49.1% Ag) both exhibit comparable safe start-up operations. The latter has an His of 1.783 Hr and a Pis of 1.30 Pr. The former has an instantaneous shock head of 1.772 Hr and a Pis of 1.30 Pr, which exhibit decreases of 0.38% and 0%, respectively;
- When the size of a safety aid is limited, other safety aids can be further equipped to avoid the failure of LAPS activations under gate refusal working conditions. When the FLVA’s size is severely limited, possessing an OVHO below 1.09 Hm in elevation will ensure the safety of the LAPS’s start-up process. When the OVHO’s size is severely limited, an FLVA with more than 2.0 m2 (15% Ag) will ensure the safety of the LAPS’s start-up process.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Qr | The design flow (m3/s) |
| Hr | The design net head (m) |
| Hm | The maximum net head (m) |
| D | The impeller diameter (m) |
| nr | The rated speed (r/min) |
| Ji | The inertia moment of the LAPS (kg·m2) |
| Jm | The motor’s moment of inertia (m3/s) |
| PM | The motor’s maximum power (kW) |
| Ag | The fast gate area (m2) |
| g | Local acceleration of gravity (m/s2) |
| H | Head (m) |
| n | Rated speed (r/min) |
| t | Time (s) |
| ρ | The density of flow (kg/m3) |
| Pr | The motor design power (kW) |
| Mr | The design impeller torque |
| ηexp | Experimental Efficiency (%) |
| ηsim | Simulated Efficiency (%) |
| Pis | Instantaneous shock power (kW) |
| His | Instantaneous shock head (m) |
| Hexp | Experimental head (m) |
| Hsim | Simulated head (m) |
| Qus | Unit synchronous speed flow (m3/s) |
| Qsc | Unit start-up completion flow (m3/s) |
| Abbreviations | |
| CFD | Computational fluid dynamics |
| LAPS | Large axial flow pump station system |
| FLVA | Flap value |
| OVHO | Overflow hole |
References
- Song, X.; Chao, L.; Wang, Z. Prediction on the pressure pulsation induced by the free surface vortex based on experimental investigation and Biot-Savart Law. Ocean Eng. 2022, 250, 110934. [Google Scholar] [CrossRef]
- Yang, F.; Li, Z.; Yuan, Y.; Lin, Z.; Zhou, G.; Ji, Q. Study on vortex flow and pressure fluctuation in dustpan-shaped conduit of a low head axial-flow pump as turbine. Renew. Energy 2022, 196, 856–869. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, F.; Tang, F.; Shi, L.; Liu, H.; Wang, L. An analysis of the hydraulic characteristics of different impel-lers in axial-flow pump devices. China Rural. Water Hydropower 2022, 8, 132–139. [Google Scholar]
- Zhang, X.; Tang, F. Investigation on hydrodynamic characteristics of coastal axial flow pump system model under full working condition of forward rotation based on experiment and CFD method. Ocean Eng. 2022, 253, 111286. [Google Scholar] [CrossRef]
- Zhang, X.; Tang, F. Investigation of the hydrodynamic characteristics of an axial flow pump system under special utilization conditions. Sci. Rep. 2022, 5, 5159. [Google Scholar] [CrossRef]
- Xu, Z.; Zheng, Y.; Kan, K.; Huang, J. Runaway characteristics of bidirectional horizontal axial flow pump with super low head based on entropy production theory. Trans. Chin. Soc. Agric. Eng. 2021, 37, 49–57. [Google Scholar]
- Zhang, Y.-L.; Ji, Y.-Y.; Zhao, Y.-J. Deep analysis of the transient behavior of centrifugal pumps during startup and shutdown. Meas. Control. 2022, 55, 155–163. [Google Scholar] [CrossRef]
- Walseth, E.C.; Nielsen, T.K.; Svingen, B. Measuring the Dynamic Characteristics of a Low Specific Speed Pump—Turbine Model. Energies 2016, 9, 199. [Google Scholar] [CrossRef] [Green Version]
- Wan, W.; Huang, W. Investigation of Fluid Transients in Centrifugal PumpIntegrated System with MultiChannel Pressure Vessel. J. Press. Technol. 2013, 135, 61301. [Google Scholar] [CrossRef]
- Chen, S.; Jiang, H.; Zhou, Z.; He, Z.; Yan, D. Study on start-up transient process simulation of large scale tubular pumping stations. J. Yangzhou Univ. (Nat. Sci. Ed.) 2009, 12, 74–78. [Google Scholar]
- Gu, M.X. Influence of Pump Characteristics on Water Hammer during Long-Distance Pressurized Water Supply Project; North China University of Water Resources and Hydropower: Zhengzhou, China, 2022. [Google Scholar]
- Zhang, L.; Zhang, J.; Yu, X.; Lv, J.; Zhang, X. Transient Simulation for a Pumped Storage Power Plant Considering Pressure Pulsation Based on Field Test. Energies 2019, 12, 2498. [Google Scholar] [CrossRef] [Green Version]
- Xiuli, M.; Giorgio, P.; Yuan, Z. Francis-Type Reversible Turbine Field Investigation During Fast Closure of Wicket Gates. J. Fluids Eng. Trans. ASME 2018, 140, 061103. [Google Scholar] [CrossRef]
- Zhang, X.X.; Cheng, Y.G.; Yang, J.D.; Xia, L.S.; Lai, X. Simulation of the load rejectiontransient process of a francis turbine by using a 1-D-3-D coupling approach. J. Hydrodyn. 2014, 5, 51–60. [Google Scholar]
- Li, Q.; Ma, X.; Wu, P.; Yang, S.; Huang, B.; Wu, D. Study on the Transient Characteristics of the Centrifugal Pump during the Startup Period with Assisted Valve. Processes 2020, 8, 1241. [Google Scholar] [CrossRef]
- Yun, L.; Bin, L.; Jie, F.; Rongsheng, Z.; Qiang, F. Research on the Transient Hydraulic Characteristics of Multistage Centrifugal Pump During Start-Up Process. Front. Energy Res. 2020, 8, 76. [Google Scholar] [CrossRef]
- Sun, K.; Li, Y.; Zhao, J.; Zhang, L. Transient starting performance analysis of vertical axis tidal turbine. J. Huazhong Univ. Sci. Tech. (Nat. Sci. Ed.) 2017, 45, 51–56. [Google Scholar]
- Zhang, Y.-L.; Zhu, Z.-C.; Li, W.-G. Experiments on transient performance of a low specific speed centrifugal pump with open impeller. Proc. Inst. Mech. Eng. Part A J. Power Energy 2016, 230, 648–659. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, Z.; Jin, Y.; Cui, B.; Li, Y.; Dou, H. Experimental study on a cen-trifugal pump with an open impeller during startup period. Therm. Sci. 2013, 22, 1–6. [Google Scholar] [CrossRef]
- Zhang, Y.-L.; Zhu, Z.-C.; Li, W.-G.; Xiao, J.-J. Effects of viscosity on transient behavior of a low specific speed centrifugal pump in starting and stopping periods. Int. J. Fluid Mech. Res. 2018, 45, 113–125. [Google Scholar] [CrossRef]
- Batista, N.C.; Melicio, R.; Matias JC, O.; Catalão, J.P.S. New bladeprofile for Darrieus wind turbines capable to self-start. In Proceedings of the IET Conference on Renewable Power Generation, Edinburgh, UK, 6–8 September 2011; pp. 1–5. [Google Scholar]
- Singh, M.A.; Biswas, A.; Misra, R.D. Investigation of self-starting and high rotor solidity on the performance of a three S1210 blade H-type Darrieus rotor. Renew. Energy 2015, 76, 381–387. [Google Scholar] [CrossRef]
- He, H.Y.; Sun, K.; Ma, Y.; Zhang, L. Self-starting performance numerical analysis of fixed-pitch verticalaxis hydro-turbine. Appl. Mech. Mater. 2014, 535, 102–105. [Google Scholar] [CrossRef]
- Shi, W.; Gong, R.; Tang, G.; Chen, S. Analysis on Start-up Transition of Diving Tubular Pumping Station Based on Matlab/Simulink Simulation. J. Irrig. Drain. 2016, 35, 97–102. [Google Scholar]
- Ge, Q.; Chen, S.; Wang, G.; Wang, L.; Yan, D. The Simulation During Start-up Transition of Bulb Type Tubular Pumping Station. Proc. CSEE 2006, 5, 159–163. [Google Scholar]
- Fu, S.; Zheng, Y.; Kan, K.; Chen, H.; Han, X.; Liang, X.; Liu, H.; Tian, X. Numerical simulation and experimental study of transient characteristics in an axial flow pump during start-up. Renew. Energy 2019, 146, 1879–1887. [Google Scholar] [CrossRef]
- Zhang, X.; Tang, F.; Liu, C.; Shi, L.; Liu, H.; Sun, Z.; Hu, W. Numerical Simulation of Transient Characteristics of Start-Up Transition Process of Large Vertical Siphon Axial Flow Pump Station. Front. Energy Res. 2021, 9, 706975. [Google Scholar] [CrossRef]
- Zhou, D.; Chen, H.; Zhang, L. Investigation of Pumped Storage Hydropower Power-Off T ransient Process Using 3D Numerical Simulation Based on SP-VOF Hybrid Model. Energies 2018, 11, 1020. [Google Scholar] [CrossRef] [Green Version]
- Zhou, D.; Chen, Y.; Chen, H.; Chen, S.; Yang, C. Study of Hydraulic Disturbances from Single-Unit Load Rejection in a Pumped-Storage Hydropower Station with a Shared Water Delivery System. IEEE Access 2019, 7, 153382–153390. [Google Scholar] [CrossRef]
- Menéndez, J.; Fernández-Oro, J.M.; Galdo, M.; Loredo, J. Transient Simulation of Underground Pumped Storage Hydropower Plants Operating in Pumping Mode. Energies 2020, 13, 1781. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area (m2) | Mass (kg) | Volume (m3) | Moment of Inertia (kg∙m2) |
|---|---|---|---|
| 1.0 | 391 | 0.050 | 124 |
| 2.0 | 783 | 0.100 | 498 |
| 3.5 | 1370 | 0.175 | 1528 |
| 5.0 | 1958 | 0.250 | 3118 |
| 6.5 | 2546 | 0.325 | 5270 |
| (a) FLVA | |||
| Elevation (m) | Diameter (m) | ||
| 5.55 | 1.5 | ||
| 5.85 | 1.5 | ||
| 6.15 | 1.5 | ||
| 6.45 | 1.5 | ||
| 6.75 | 1.5 | ||
| (b) OVHO | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Yang, C.; Song, X.; Tang, F.; Hu, C.; Yang, F.; Shi, L. Study of Safety Auxiliary Facilities to Prevent the Start-Up Failure of Large Axial Flow Pump Systems under Gate Failure Working Conditions. J. Mar. Sci. Eng. 2023, 11, 220. https://doi.org/10.3390/jmse11010220
Zhang X, Yang C, Song X, Tang F, Hu C, Yang F, Shi L. Study of Safety Auxiliary Facilities to Prevent the Start-Up Failure of Large Axial Flow Pump Systems under Gate Failure Working Conditions. Journal of Marine Science and Engineering. 2023; 11(1):220. https://doi.org/10.3390/jmse11010220
Chicago/Turabian StyleZhang, Xiaowen, Chenglin Yang, Xijie Song, Fangping Tang, Chongyang Hu, Fan Yang, and Lijian Shi. 2023. "Study of Safety Auxiliary Facilities to Prevent the Start-Up Failure of Large Axial Flow Pump Systems under Gate Failure Working Conditions" Journal of Marine Science and Engineering 11, no. 1: 220. https://doi.org/10.3390/jmse11010220