
A Modified MPS Method with a Split-Pressure Poisson Equation and a Virtual Particle for Simulating Free Surface Flows

Abstract
:1. Introduction
2. Original MPS Method
2.1. Governing Equations
2.2. Gradient Operator and Laplacian Operator
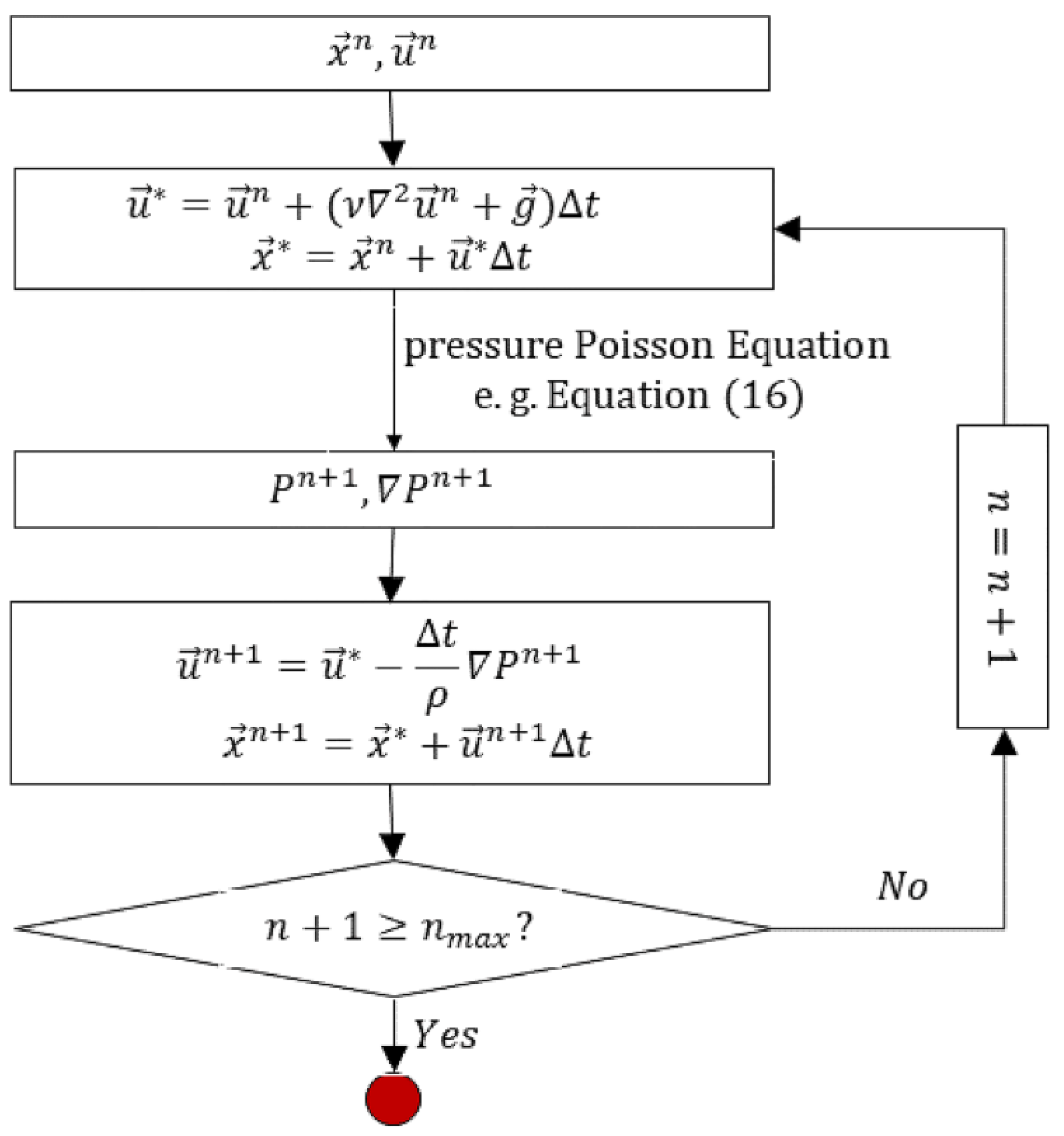
2.3. Simulation Process of Traditional MPS Scheme
3. Proposed MPS Method
3.1. Improved Source Term of Pressure Poisson Equation
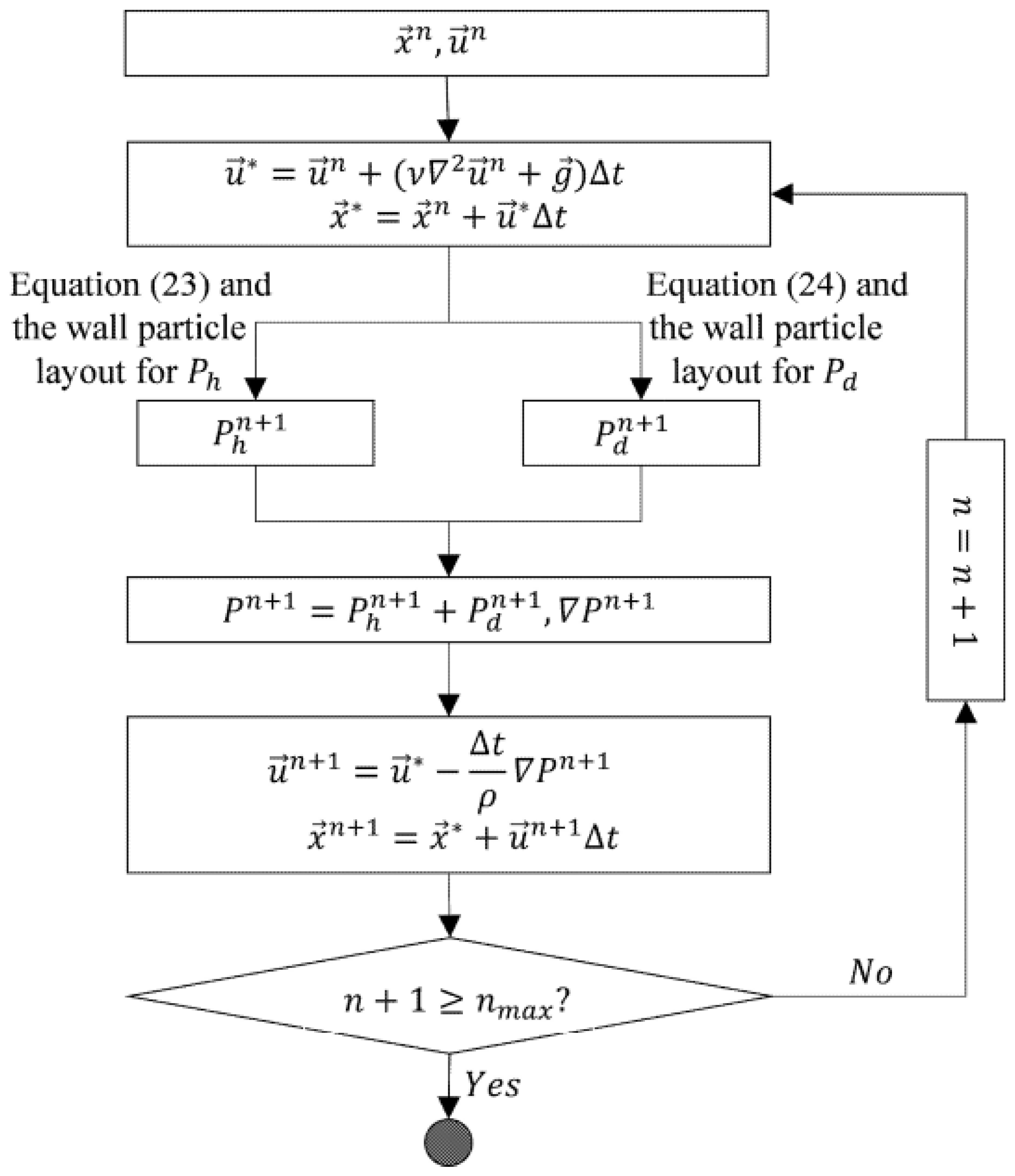
3.2. Modified MPS Scheme with a Split-Pressure Poisson Equation
3.3. Laplacian Operator
3.4. Improved Virtual Particle Technology with Given Position
3.4.1. Classification of Free Surface Particles
3.4.2. Position of a Virtual Particle
3.4.3. Discrete Dynamic Pressure Poisson Equation on a Free Surface
3.4.4. Pressure Gradient on a Free Surface
3.5. Judgement of Free Surface Particles
4. Verification
4.1. Hydrostatic Problems
4.1.1. Hydrostatic Problem in a Regular Tank
4.1.2. Hydrostatic Problem in a Tank with an Irregular Bottom
4.2. Dam-Breaking Experiment
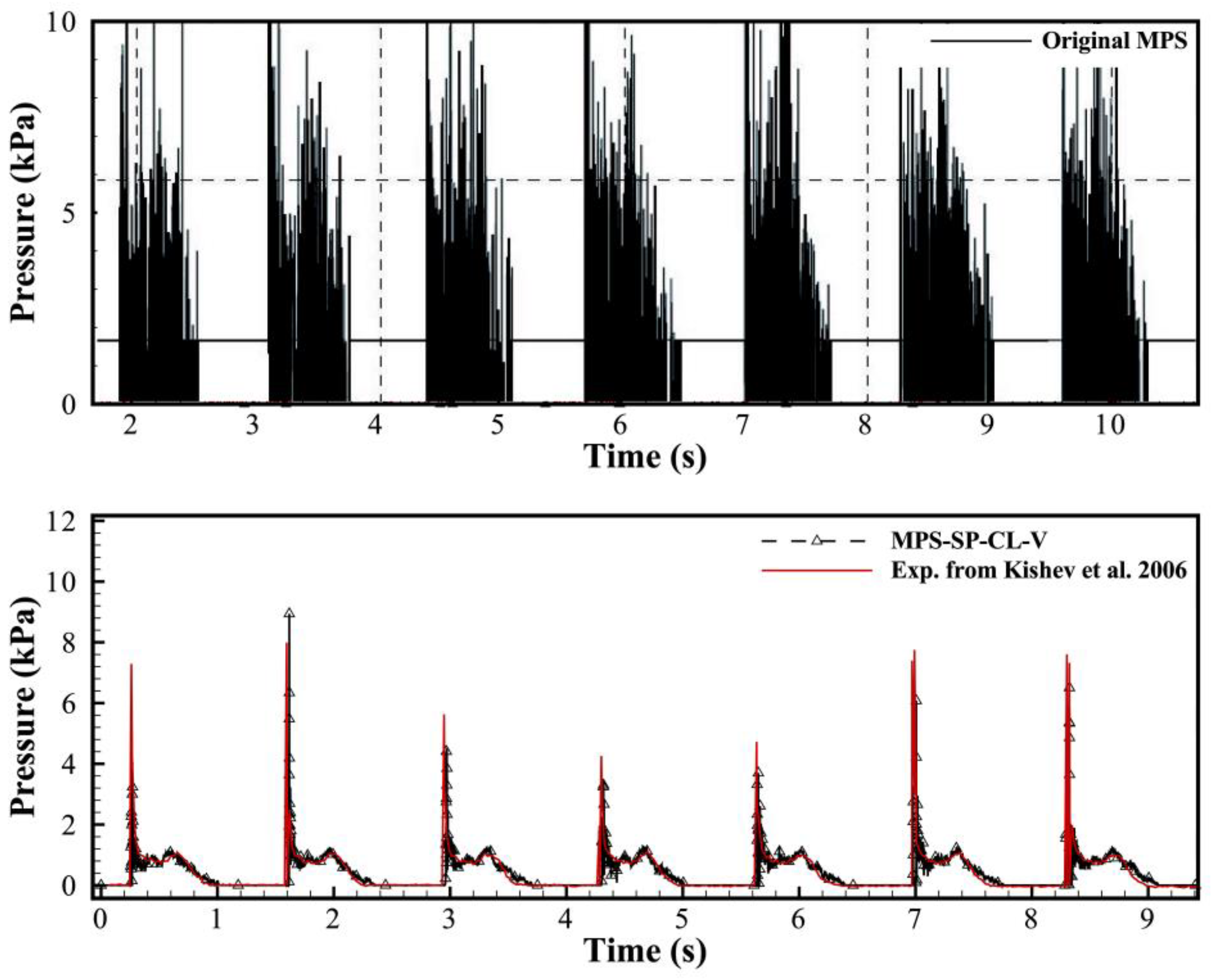
4.3. Violent Sloshing
5. Conclusions
- The stability of the consistent Laplacian operator was better than that of the original operator, but the degree of enhancement was limited;
- The proposed virtual particle technique applied to the consistent Laplacian operator was demonstrated to be effective for suppressing unphysical pressure fluctuation;
- Hydrostatic pressure can be reproduced stably and accurately by the MPS-SP-CL-V method in which the modified MPS scheme with a split-pressure Poisson equation is adopted;
- A remarkable enhancement in stability was demonstrated when using the MPS-SP-CL-V method to simulate the dam-breaking problem and the violent sloshing problem.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Koshizuka, S.; Tamako, H.; Oka, Y. A Particle Method for Incompressible Viscous Flow With Fluid Fragmentation. Comput. Fluid Dyn. J. 1995, 4, 29–46. [Google Scholar]
- Huang, Y.; Zhu, C. Numerical Analysis of Tsunami–Structure Interaction Using a Modified MPS Method. Nat. Hazards 2015, 75, 2847–2862. [Google Scholar] [CrossRef]
- Pan, X.J.; Zhang, H.X.; Lu, Y.T. Numerical Simulation of Viscous Liquid Sloshing by Moving-Particle Semi-Implicit Method. J. Mar. Sci. Appl. 2008, 7, 184–189. [Google Scholar] [CrossRef]
- Pan, X.J.; Zhang, H.X.; Sun, X.Y. Numerical Simulation of Sloshing with Large Deforming Free Surface by MPS-LES Method. China Ocean Eng. 2012, 26, 653–668. [Google Scholar] [CrossRef]
- Shibata, K.; Koshizuka, S.; Sakai, M.; Tanizawa, K. Lagrangian Simulations of Ship-Wave Interactions in Rough Seas. Ocean Eng. 2012, 42, 13–25. [Google Scholar] [CrossRef]
- Shibata, K.; Masaie, I.; Kondo, M.; Murotani, K.; Koshizuka, S. Improved Pressure Calculation for the Moving Particle Semi-Implicit Method. Comput. Part. Mech. 2015, 2, 91–108. [Google Scholar] [CrossRef] [Green Version]
- Shibata, K.; Koshizuka, S.; Sakai, M.; Tanizawa, K.; Ota, S. Numerical Analysis of Acceleration of a Free-Fall Lifeboat Using the MPS Method. Int. J. Offshore Polar Eng. 2013, 23, 279–285. [Google Scholar]
- Sun, Z.; Chen, X.; Xi, G.; Liu, L.; Chen, X. Mass Transfer Mechanisms of Rotary Atomization: A Numerical Study Using the Moving Particle Semi-Implicit Method. Int. J. Heat Mass Transf. 2017, 105, 90–101. [Google Scholar] [CrossRef]
- Yang, C.; Zhang, H. Numerical Simulation of the Interactions between Fluid and Structure in Application of the MPS Method Assisted with the Large Eddy Simulation Method. Ocean Eng. 2018, 155, 55–64. [Google Scholar] [CrossRef]
- Duan, G.; Chen, B.; Zhang, X.; Wang, Y. A Multiphase MPS Solver for Modeling Multi-Fluid Interaction with Free Surface and Its Application in Oil Spill. Comput. Methods Appl. Mech. Eng. 2017, 320, 133–161. [Google Scholar] [CrossRef] [Green Version]
- Chen, R.; Tian, W.; Su, G.H.; Qiu, S.; Ishiwatari, Y.; Oka, Y. Numerical Investigation on Bubble Dynamics during Flow Boiling Using Moving Particle Semi-Implicit Method. Nucl. Eng. Des. J. 2010, 240, 3830–3840. [Google Scholar] [CrossRef]
- Chen, R.H.; Tian, W.X.; Su, G.H.; Qiu, S.Z.; Ishiwatari, Y.; Oka, Y. Numerical Investigation on Coalescence of Bubble Pairs Rising in a Stagnant Liquid. Chem. Eng. Sci. 2011, 66, 5055–5063. [Google Scholar] [CrossRef]
- Koshizuka, S.; Oka, Y. Moving-Particle Semi-Implicit Method for Fragmentation of Incompressible Fluid. Nucl. Sci. Eng. 1996, 123, 421–434. [Google Scholar] [CrossRef]
- Ng, K.C.; Hwang, Y.H.; Sheu, T.W.H. On the Accuracy Assessment of Laplacian Models in MPS. Comput. Phys. Commun. 2014, 185, 2412–2426. [Google Scholar] [CrossRef]
- Zhang, S.; Morita, K.; Fukuda, K.; Shirakawa, N. An Improved MPS Method for Numerical Simulations of Convective Heat Transfer Problems. Int. J. Numer. Methods Fluids 2006, 51, 31–47. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H. A Higher Order Laplacian Model for Enhancement and Stabilization of Pressure Calculation by the MPS Method. Appl. Ocean Res. 2010, 32, 124–131. [Google Scholar] [CrossRef]
- Xu, T.; Jin, Y.C. Improvements for Accuracy and Stability in a Weakly-Compressible Particle Method. Comput. Fluids 2016, 137, 1–14. [Google Scholar] [CrossRef]
- Tamai, T.; Koshizuka, S. Least Squares Moving Particle Semi-Implicit Method. Comput. Part. Mech. 2014, 1, 277–305. [Google Scholar] [CrossRef] [Green Version]
- Duan, G.; Yamaji, A.; Koshizuka, S.; Chen, B. The Truncation and Stabilization Error in Multiphase Moving Particle Semi-Implicit Method Based on Corrective Matrix: Which Is Dominant? Comput. Fluids 2019, 190, 254–273. [Google Scholar] [CrossRef]
- Duan, G.; Yamaji, A.; Koshizuka, S. A Novel Multiphase MPS Algorithm for Modeling Crust Formation by Highly Viscous Fluid for Simulating Corium Spreading. Nucl. Eng. Des. 2019, 343, 218–231. [Google Scholar] [CrossRef]
- Liu, X.; Morita, K.; Zhang, S. A Stable Moving Particle Semi-Implicit Method with Renormalized Laplacian Model Improved for Incompressible Free-Surface Flows. Comput. Methods Appl. Mech. Eng. 2019, 356, 199–219. [Google Scholar] [CrossRef]
- Toyota, E. A Particle Method with Variable Spatial Resolution for Incompressible Flows. Proc. 19th Symp. Comput. Fluid Dyn. 2005, 2005, 10030478899. [Google Scholar]
- Khayyer, A.; Gotoh, H. Modified Moving Particle Semi-Implicit Methods for the Prediction of 2D Wave Impact Pressure. Coast. Eng. 2009, 56, 419–440. [Google Scholar] [CrossRef]
- Jandaghian, M.; Shakibaeinia, A. An Enhanced Weakly-Compressible MPS Method for Free-Surface Flows. Comput. Methods Appl. Mech. Eng. 2020, 360, 112771. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H. Enhancement of Stability and Accuracy of the Moving Particle Semi-Implicit Method. J. Comput. Phys. 2011, 230, 3093–3118. [Google Scholar] [CrossRef]
- Wang, L.; Jiang, Q.; Zhang, C. Improvement of Moving Particle Semi-Implicit Method for Simulation of Progressive Water Waves. Int. J. Numer. Methods Fluids 2017, 85, 636–666. [Google Scholar] [CrossRef]
- Liu, X.; Morita, K.; Zhang, S. An Advanced Moving Particle Semi-Implicit Method for Accurate and Stable Simulation of Incompressible Flows. Comput. Methods Appl. Mech. Eng. 2018, 339, 467–487. [Google Scholar] [CrossRef]
- Khayyer, A.; Gotoh, H. A 3D Higher Order Laplacian Model for Enhancement and Stabilization of Pressure Calculation in 3D MPS-Based Simulations. Appl. Ocean Res. 2012, 37, 120–126. [Google Scholar] [CrossRef]
- Lee, B.H.; Park, J.C.; Kim, M.H.; Hwang, S.C. Step-by-Step Improvement of MPS Method in Simulating Violent Free-Surface Motions and Impact-Loads. Comput. Methods Appl. Mech. Eng. 2011, 200, 1113–1125. [Google Scholar] [CrossRef]
- Sun, Z.; Djidjeli, K.; Xing, J.T.; Cheng, F. Modified MPS Method for the 2D Fluid Structure Interaction Problem with Free Surface. Comput. Fluids 2015, 122, 47–65. [Google Scholar] [CrossRef] [Green Version]
- Kondo, M.; Koshizuka, S. Improvement of Stability in Moving Particle Semi-Implicit Method. Int. J. Numer. Methods Fluids 2011, 65, 638–654. [Google Scholar] [CrossRef]
- Tanaka, M.; Masunaga, T. Stabilization and Smoothing of Pressure in MPS Method by Quasi-Compressibility. J. Comput. Phys. 2010, 229, 4279–4290. [Google Scholar] [CrossRef]
- Guo, K.; Chen, R.; Qiu, S.; Tian, W.; Su, G. An Improved Multiphase Moving Particle Semi-Implicit Method in Bubble Rising Simulations with Large Density Ratios. Nucl. Eng. Des. 2018, 340, 370–387. [Google Scholar] [CrossRef]
- Li, D.; Zhang, H.; Yao, H. An Accurate and Stable Alternating Directional Moving Particle Semi-Implicit Method for Incompressible Flow Simulation. Adv. Mech. Eng. 2022, 14, 16878132221112570. [Google Scholar] [CrossRef]
- Chen, X.; Xi, G.; Sun, Z.G. Improving Stability of MPS Method by a Computational Scheme Based on Conceptual Particles. Comput. Methods Appl. Mech. Eng. 2014, 278, 254–271. [Google Scholar] [CrossRef]
- Guermond, J.L.; Minev, P.; Shen, J. An Overview of Projection Methods for Incompressible Flows. Comput. Methods Appl. Mech. Eng. 2006, 195, 6011–6045. [Google Scholar] [CrossRef] [Green Version]
- Rannacher, R. On Chorin’s Projection Method for the Incompressible Navier-Stokes Equations. Navier-Stokes Equ. II Theory Numer. Methods 1992, 1530, 167–183. [Google Scholar] [CrossRef]
- Zhang, G.; Wu, J.; Sun, Z.; el Moctar, O.; Zong, Z. Numerically Simulated Flooding of a Freely-Floating Two-Dimensional Damaged Ship Section Using an Improved MPS Method. Appl. Ocean Res. 2020, 101, 102207. [Google Scholar] [CrossRef]
- Pan, X.J.; Zhang, H.X.; Sun, X.Y. A Free Surfacetraced Method for Moving Particle Semi-Implicit Method. Shanghai Jiaotong Daxue Xuebao J. Shanghai Jiaotong Univ. 2010, 44, 134–138. (In Chinese) [Google Scholar]
- Zhang, Y.; Wang, D. Apply MPS Method to Simulate Liquid Sloshing in LNG Tang. In Proceedings of the Twenty-second International Offshore and Polar Engineering Conference, Rhodes, Greece, 17 June 2012; pp. 381–391. [Google Scholar]
- Sun, C.; Shen, Z.; Zhang, M. Surface Treatment Technique of MPS Method for Free Surface Flows. Eng. Anal. Bound. Elem. 2019, 102, 60–72. [Google Scholar] [CrossRef]
- Lobovský, L.; Botia-Vera, E.; Castellana, F.; Mas-Soler, J.; Souto-Iglesias, A. Experimental Investigation of Dynamic Pressure Loads during Dam Break. J. Fluids Struct. 2014, 48, 407–434. [Google Scholar] [CrossRef] [Green Version]
- You, Y.; Khayyer, A.; Zheng, X.; Gotoh, H.; Ma, Q. Enhancement of δ-SPH for Ocean Engineering Applications through Incorporation of a Background Mesh Scheme. Appl. Ocean Res. 2021, 110, 102508. [Google Scholar] [CrossRef]
- Kishev, Z.R.; Hu, C.; Kashiwagi, M. Numerical Simulation of Violent Sloshing by a CIP-Based Method. J. Mar. Sci. Technol. 2006, 11, 111–122. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | MPS Scheme | Laplacian Operator | Virtual Particle Technique |
|---|---|---|---|
| MPS-OL | Original scheme | Original (Equation (7)) | × |
| MPS-CL | Original scheme | Consistent (Equation (25)) | × |
| MPS-CL-V | Original scheme | Consistent (Equation (25)) | √, Equations (38) and (40) |
| MPS-SP-CL-V | MPS-SP scheme | Consistent (Equation (25)) | √, Equations (38) and (40) |
| Model | MPS-OL | MPS-CL | MPS-CL-V | MPS-SP-CL-V |
| Average error | 4.14% | 3.27% | 4.81% | 2.89% |
| Model | MPS-OL | MPS-CL | MPS-CL-V | MPS-SP-CL-V |
| Time cost | 20.3 min | 20.3 min | 22.2 min | 87.6 min |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Zhang, H.; Qin, G. A Modified MPS Method with a Split-Pressure Poisson Equation and a Virtual Particle for Simulating Free Surface Flows. J. Mar. Sci. Eng. 2023, 11, 215. https://doi.org/10.3390/jmse11010215
Li D, Zhang H, Qin G. A Modified MPS Method with a Split-Pressure Poisson Equation and a Virtual Particle for Simulating Free Surface Flows. Journal of Marine Science and Engineering. 2023; 11(1):215. https://doi.org/10.3390/jmse11010215
Chicago/Turabian StyleLi, Date, Huaixin Zhang, and Guangfei Qin. 2023. "A Modified MPS Method with a Split-Pressure Poisson Equation and a Virtual Particle for Simulating Free Surface Flows" Journal of Marine Science and Engineering 11, no. 1: 215. https://doi.org/10.3390/jmse11010215