
Extended State Observer-Based Parameter Identification of Response Model for Autonomous Vessels

Abstract
:1. Introduction
1.1. Motivation
1.2. Related Work
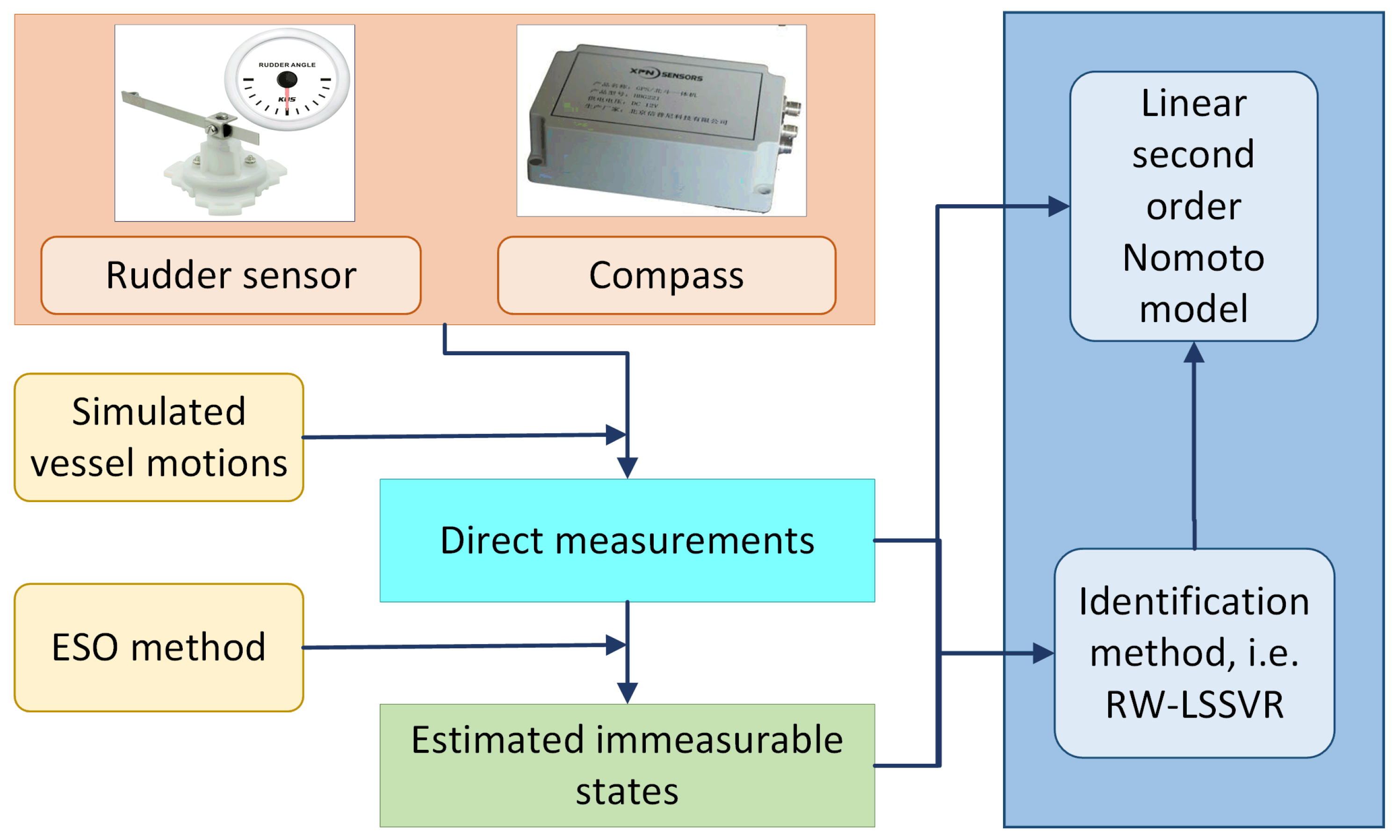
1.3. The Overview of the Framework Regarding the Proposed Identification Approach
1.4. Contribution
1.5. Structure of the Paper
2. Linear Response Model
3. Research Methodology
3.1. State Estimation Based on ESO
3.2. Parameter Identification Using RW-LSSVR
- The median absolute deviation donated as of the dataset is calculated by adopting Equation (21).where is the median of the dataset, is the median absolute deviation of the dataset, is the function of round-down, and 1.4826 is a constant setting to guarantee an unbiased calculation of the standard deviation for Gaussian data [46].
- The absolute error of every data contained in the dataset is calculated using Equation (22).
- Judge the sign of the difference calculation between and for every data , i.e., . The datum is defined as an outlier and deleted from the dataset if its sign is positive, otherwise move to the next datum and repeat the above adjustment process until .
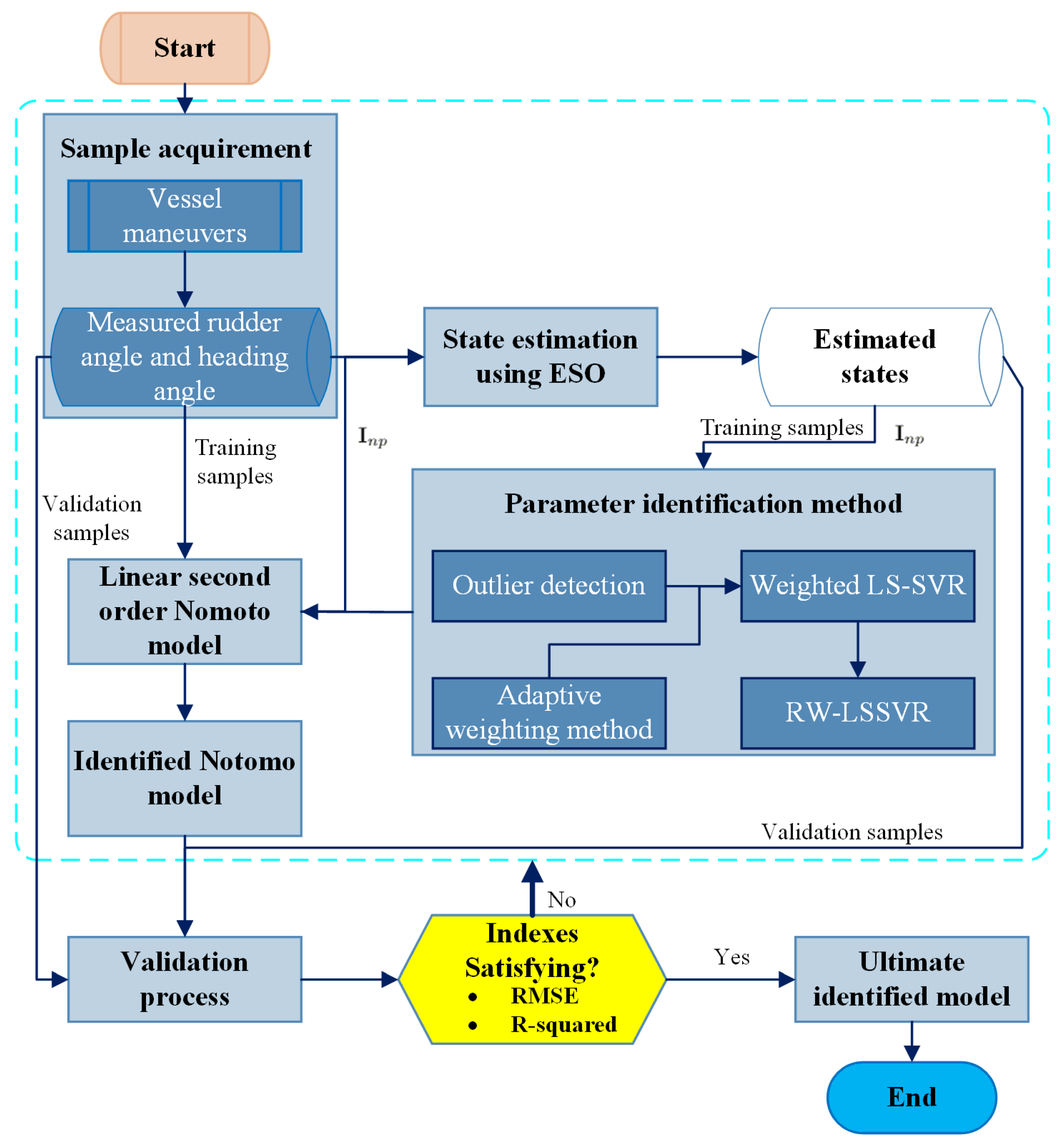
3.3. Identification Procedure
4. Results
4.1. Experiment Setup
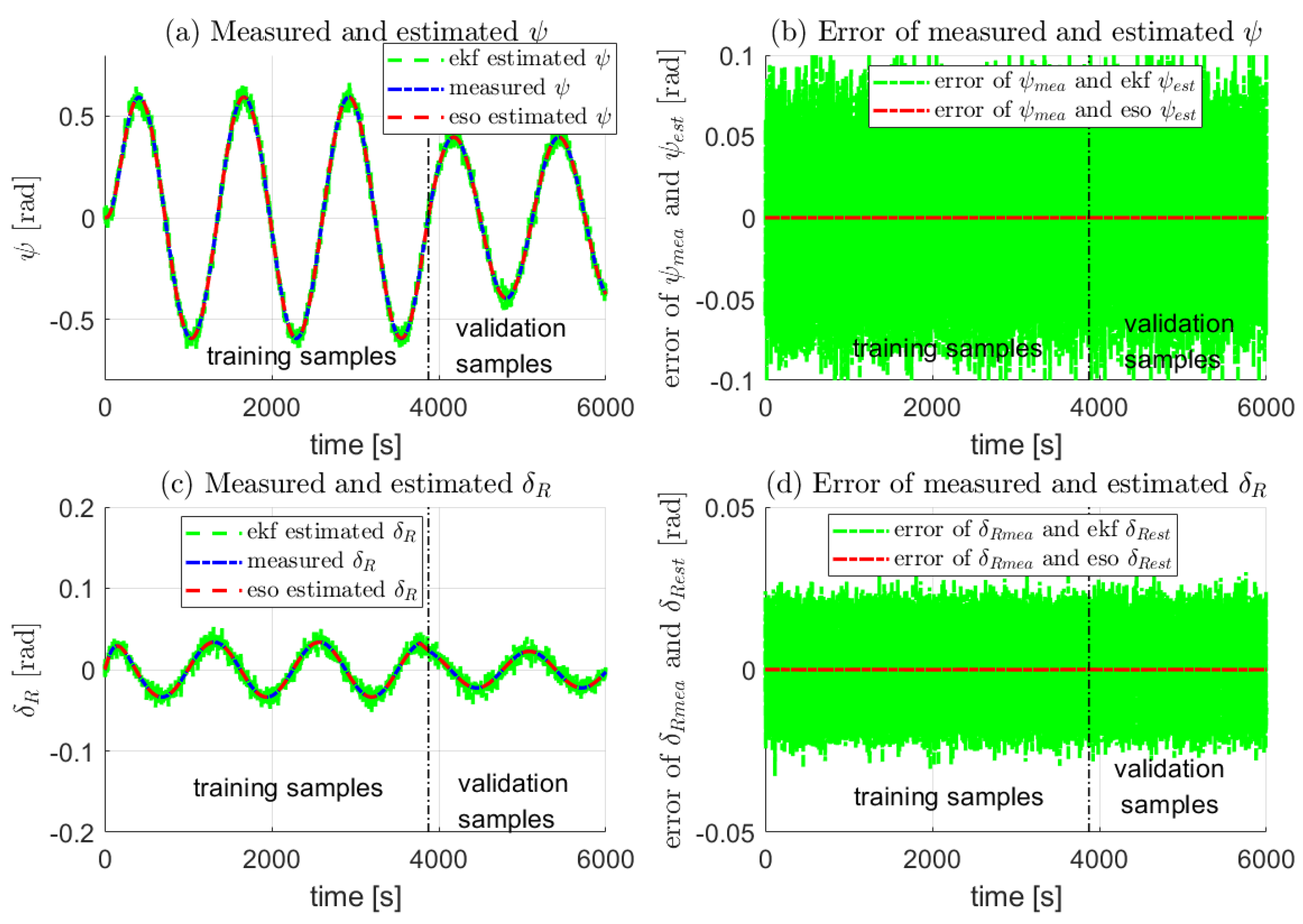
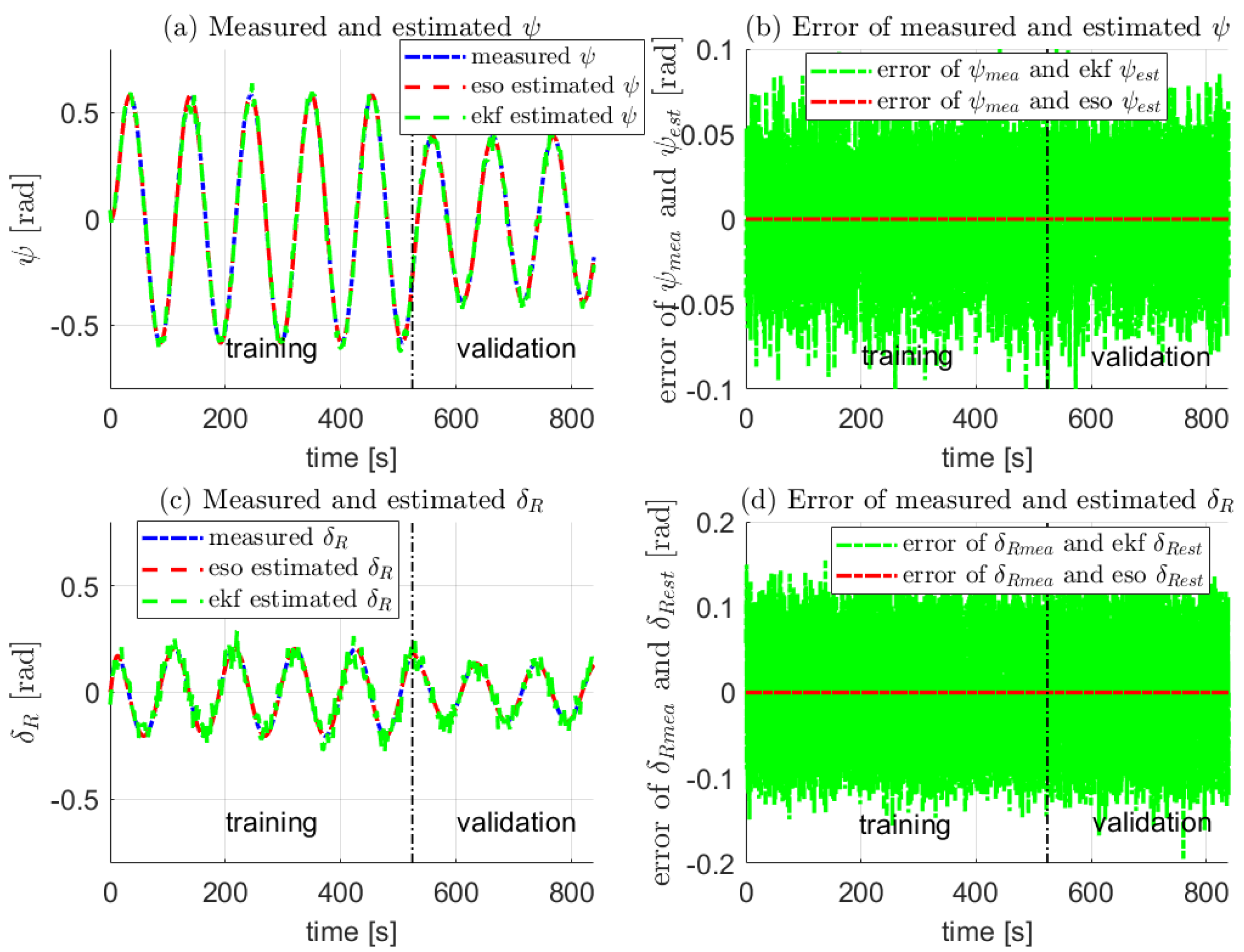
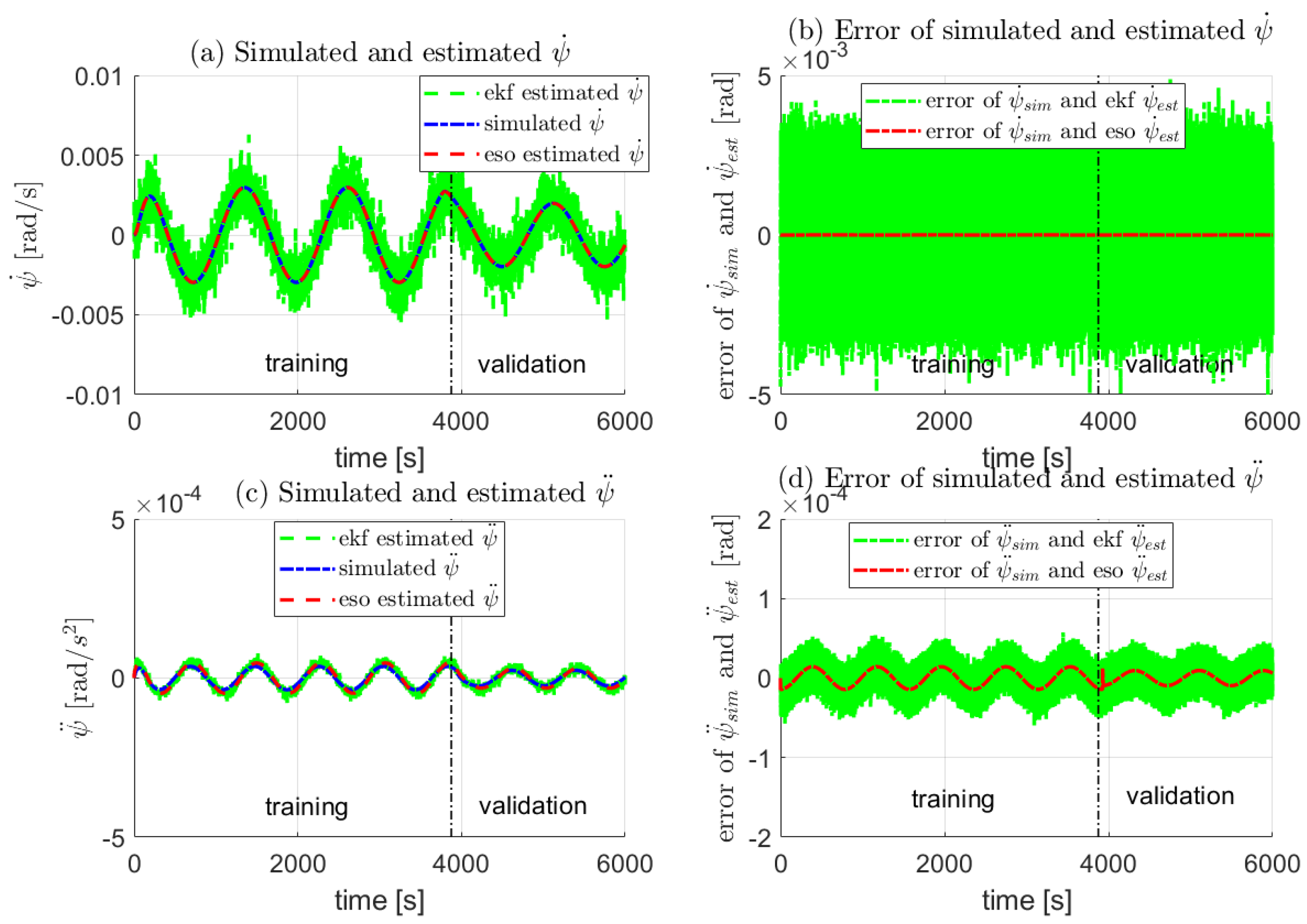
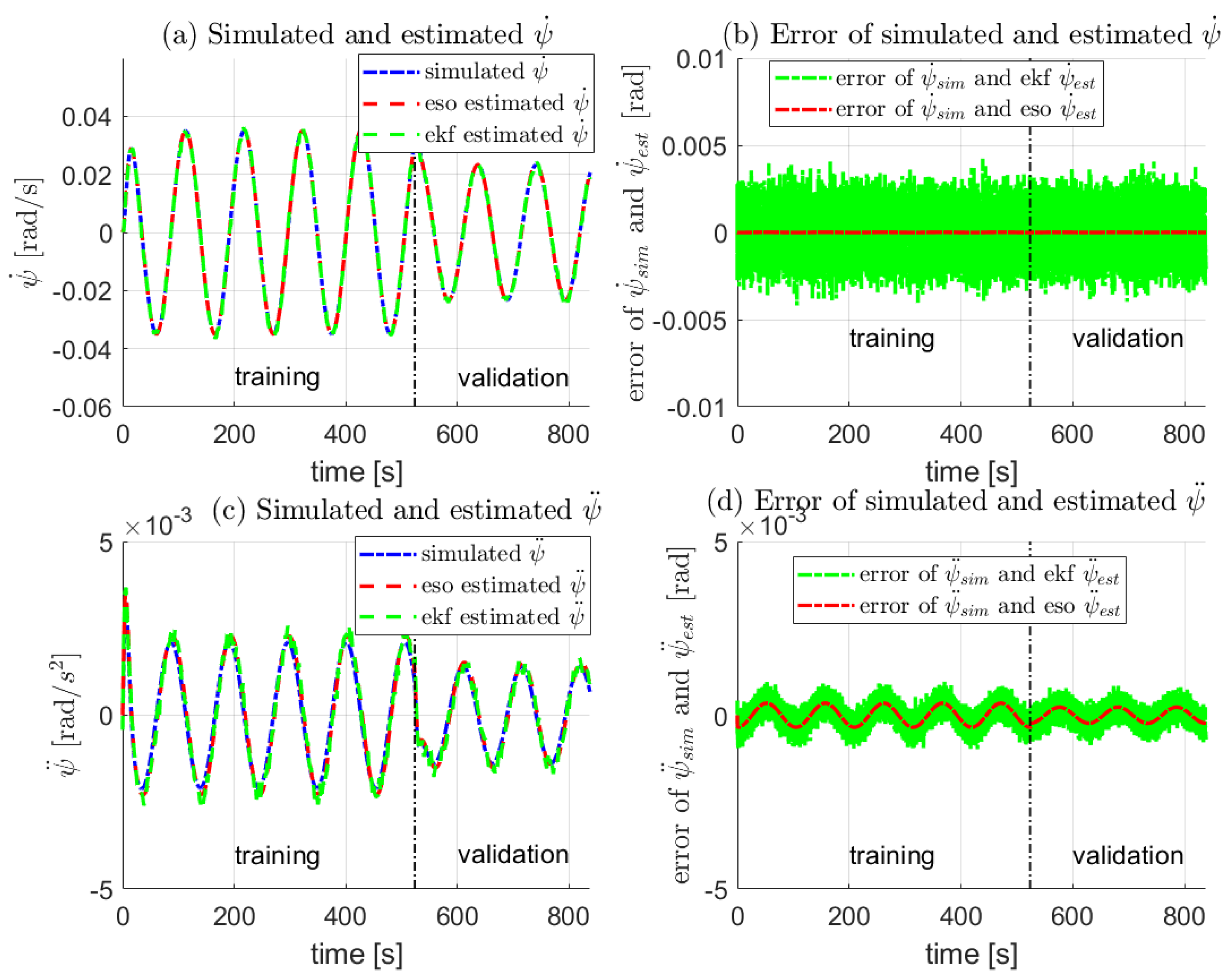
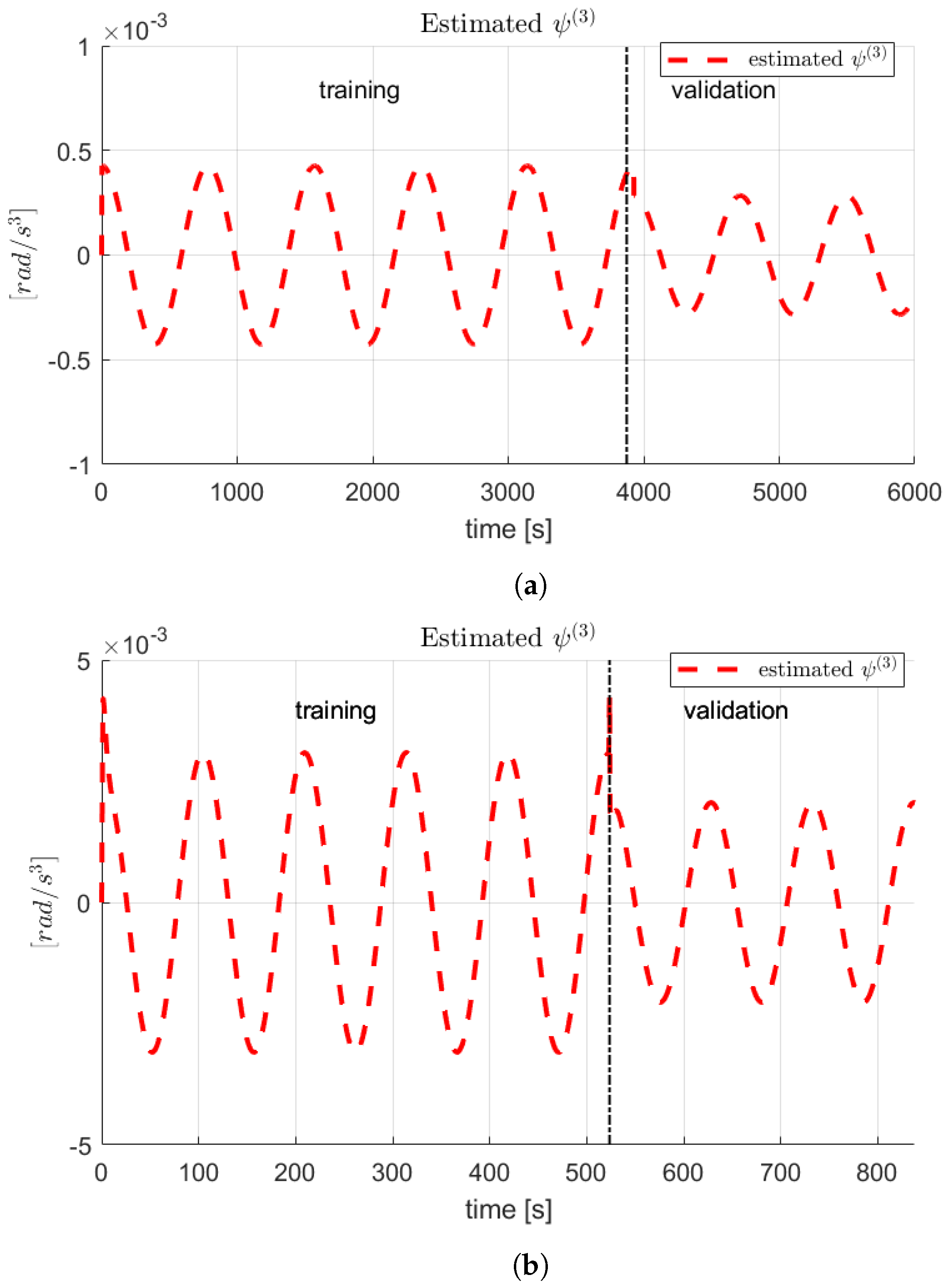
4.2. State Estimation Results
4.3. Identification Results
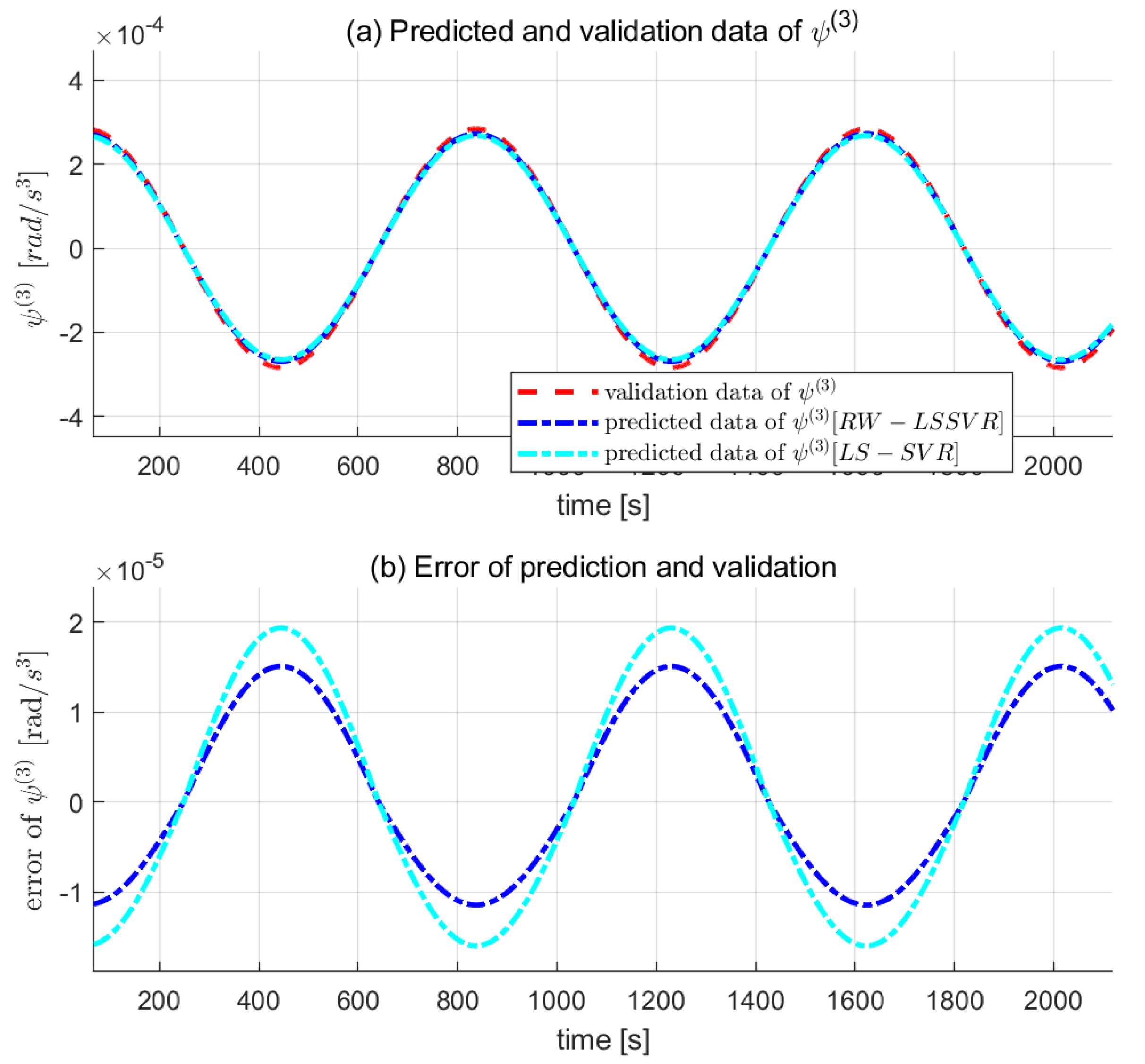
4.4. Validation of the Identified Model
5. Conclusions and Future Work
5.1. Conclusions
5.2. Future Work
- Optimize the hybrid identification approach. Although the proposed identification method has achieved good estimation and identification results, there are some points that deserved to be addressed for the hyper-parameters in the RW-LSSVR, such as initial weight and penalty factor significantly impacting the identification performance. These hyper-parameters are required to be effectively set, which can be regarded as an optimization problem. Apart from the ABC algorithm used in this work, many new algorithms can be alternatives, such as the partially coupled nonlinear parameter optimization algorithm [51], the metaheuristic approach [52], the prairie dog optimization algorithm [53], the deep learning algorithm [54], and so on. It is a new attempt to apply these algorithms to improve identification performance.
- Expend the scope of evaluation scenarios. In this study, one degree of freedom (DOF) dynamic concerning the heading response was modeled based on the hybrid identification approach. The proposed approach can be extended to other kinds of autonomous vessel dynamic models such as the 3 DOF horizontal model, and 4 DOF dynamic model. Satisfactory evaluation of the proposed hybrid identification approach comes from the simulation study as well as the field experimental study. In future research, efforts should be made to carry out experimental studies on the proposed approach as well as to improve the identification accuracy. Moreover, the impacts induced by noisy measurements involving real environmental disturbances and sensor noises will be further studied.
- Modify the approach to be applicable to online identification. The hybrid identification approach was proposed mainly for offline identification of the response models for two autonomous vessels respectively. In the future, more complicated situations can be considered. According to the Froude number [7,55], vessel motion mode is varied along with the changes in the vessel speed or the loading condition. Interests in how these two factors affect vessel motions have been paid with the use of online identification methods [56,57]. From recent research on SVM issues, the SVM-based identification method was modified into an online version, e.g., the multi-innovation gradient SVM studied in [58]. Similarly, the upcoming research point on the proposed hybrid identification approach could be a suitable modification to make the approach an online one.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Munim, Z.H. Autonomous ships: A review, innovative applications and future maritime business models. In Supply Chain Forum: An International Journal; Taylor & Francis: Abingdon, UK, 2019; Volume 20, pp. 266–279. [Google Scholar]
- Rødseth, Ø.J. From concept to reality: Unmanned merchant ship research in Norway. In Proceedings of the Underwater Technology (UT), Busan, Korea, 21–24 February 2017. [Google Scholar]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Gu, Y.; Goez, J.C.; Guajardo, M.; Wallace, S.W. Autonomous vessels: State of the art and potential opportunities in logistics. Int. Trans. Oper. Res. 2019, 28, 1706–1739. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Zhu, M.; Sun, W.; Hahn, A.; Wen, Y.; Xiao, C.; Tao, W. Adaptive modeling of maritime autonomous surface ships with uncertainty using a weighted LS-SVR robust to outliers. Ocean. Eng. 2020, 200, 107053. [Google Scholar] [CrossRef]
- Zhu, M. Optimized Support Vector Regression Algorithm-Based Modeling of Ship Dynamics. Ph.D. Thesis, Universität Oldenburg, Oldenburg, Germany, 2018. [Google Scholar]
- Liu, C.; Negenborn, R.R.; Zheng, H.; Chu, X. A state-compensation extended state observer for model predictive control. Eur. J. Control 2017, 36, 1–9. [Google Scholar] [CrossRef]
- Guo, H.p.; Zou, Z.j. System-based investigation on 4-DOF ship maneuvering with hydrodynamic derivatives determined by RANS simulation of captive model tests. Appl. Ocean. Res. 2017, 68, 11–25. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, H.; Xia, L.; Zou, Z.; Soares, C.G. Kernel-based support vector regression for nonparametric modeling of ship maneuvering motion. Ocean. Eng. 2020, 216, 107994. [Google Scholar] [CrossRef]
- Prpić-Oršić, J.; Valčić, M.; Čarija, Z. A Hybrid Wind Load Estimation Method for Container Ship Based on Computational Fluid Dynamics and Neural Networks. J. Mar. Sci. Eng. 2020, 8, 539. [Google Scholar] [CrossRef]
- Du, P.; Cheng, L.; Tang, Z.j.; Ouahsine, A.; Hu, H.b.; Hoarau, Y. Ship maneuvering prediction based on virtual captive model test and system dynamics approaches. J. Hydrodyn. 2022, 34, 259–276. [Google Scholar] [CrossRef]
- Andersson, J.; Shiri, A.A.; Bensow, R.E.; Yixing, J.; Chengsheng, W.; Gengyao, Q.; Deng, G.; Queutey, P.; Xing-Kaeding, Y.; Horn, P.; et al. Ship-scale CFD benchmark study of a pre-swirl duct on KVLCC2. Appl. Ocean. Res. 2022, 123, 103134. [Google Scholar] [CrossRef]
- Ljung, L. Perspectives on system identification. Annu. Rev. Control 2010, 34, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Gevers, M. A personal view of the development of system identification: A 30-year journey through an exciting field. IEEE Control Syst. Mag. 2006, 26, 93–105. [Google Scholar]
- Wang, Z.; Soares, C.G.; Zou, Z. Optimal design of excitation signal for identification of nonlinear ship manoeuvring model. Ocean Eng. 2020, 196, 106778. [Google Scholar] [CrossRef]
- Meng, Y.; Zhang, X.; Zhu, J. Parameter identification of ship motion mathematical model based on full-scale trial data. Int. J. Nav. Archit. Ocean. Eng. 2022, 14, 100437. [Google Scholar] [CrossRef]
- Guan, W.; Peng, H.; Zhang, X.; Sun, H. Ship Steering Adaptive CGS Control Based on EKF Identification Method. J. Mar. Sci. Eng. 2022, 10, 294. [Google Scholar] [CrossRef]
- Zhang, X.; Meng, Y.; Liu, Z.; Zhu, J. Modified grey wolf optimizer-based support vector regression for ship maneuvering identification with full-scale trial. J. Mar. Sci. Technol. 2022, 27, 576–588. [Google Scholar] [CrossRef]
- Xue, Y.; Liu, Y.; Ji, C.; Xue, G.; Huang, S. System identification of ship dynamic model based on Gaussian process regression with input noise. Ocean Eng. 2020, 216, 107862. [Google Scholar] [CrossRef]
- Wang, L.; Li, S.; Liu, J.; Wu, Q. Data-driven model identification and predictive control for path-following of underactuated ships with unknown dynamics. Int. J. Nav. Archit. Ocean Eng. 2022, 14, 100445. [Google Scholar] [CrossRef]
- Miyauchi, Y.; Maki, A.; Umeda, N.; Rachman, D.M.; Akimoto, Y. System parameter exploration of ship maneuvering model for automatic docking/berthing using CMA-ES. J. Mar. Sci. Technol. 2022, 27, 1065–1083. [Google Scholar] [CrossRef]
- Song, C.; Zhang, X.; Zhang, G. Nonlinear identification for 4-DOF ship maneuvering modeling via full-scale trial data. IEEE Trans. Ind. Electron. 2021, 69, 1829–1835. [Google Scholar] [CrossRef]
- Chen, C.; Ruiz, M.T.; Delefortrie, G.; Mei, T.; Vantorre, M.; Lataire, E. Parameter estimation for a ship’s roll response model in shallow water using an intelligent machine learning method. Ocean Eng. 2019, 191, 106479. [Google Scholar] [CrossRef]
- Wang, Z.; Zou, Z.; Soares, C.G. Identification of ship manoeuvring motion based on nu-support vector machine. Ocean Eng. 2019, 183, 270–281. [Google Scholar] [CrossRef]
- Simpkins, A. System identification: Theory for the user, (ljung, l.; 1999) [on the shelf]. IEEE Robot. Autom. Mag. 2012, 19, 95–96. [Google Scholar] [CrossRef]
- Schoukens, J.; Ljung, L. Nonlinear system identification: A user-oriented road map. IEEE Control Syst. Mag. 2019, 39, 28–99. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Liu, J.; Vazquez, S.; Wu, L.; Marquez, A.; Gao, H.; Franquelo, L.G. Extended state observer-based sliding-mode control for three-phase power converters. IEEE Trans. Ind. Electron. 2016, 64, 22–31. [Google Scholar] [CrossRef]
- Stanković, M.R.; Rapaić, M.R.; Manojlović, S.M.; Mitrović, S.T.; Simić, S.M.; Naumović, M.B. Optimised active disturbance rejection motion control with resonant extended state observer. Int. J. Control 2019, 92, 1815–1826. [Google Scholar] [CrossRef]
- Sun, T.; Zhang, J.; Pan, Y. Active disturbance rejection control of surface vessels using composite error updated extended state observer. Asian J. Control 2017, 19, 1802–1811. [Google Scholar] [CrossRef]
- Shi, D.; Wu, Z.; Chou, W. Anti-disturbance trajectory tracking of quadrotor vehicles via generalized extended state observer. J. Vib. Control 2020, 26, 1173–1186. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Liu, S.; Li, Z.; Zhang, H.; Zhang, Z. An approach to suppress low-frequency oscillation by combining extended state observer with model predictive control of EMUs rectifier. IEEE Trans. Power Electron. 2019, 34, 10282–10297. [Google Scholar] [CrossRef]
- Luenberger, D. An introduction to observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Gu, D.K.; Liu, Q.Z.; Liu, Y.D. Parametric design of functional interval observer for time-delay systems with additive disturbances. Circuits Syst. Signal Process. 2022, 41, 2614–2635. [Google Scholar] [CrossRef]
- Li, S.; Yan, Y.; Jiang, D.; Guo, Q. Synchronized control of multiple electrohydraulic systems with terminal sliding mode observer under parametric uncertainty and external load. ISA Trans. 2022. [Google Scholar] [CrossRef] [PubMed]
- Deng, C.; Wen, C.; Huang, J.; Zhang, X.M.; Zou, Y. Distributed observer-based cooperative control approach for uncertain nonlinear MASs under event-triggered communication. IEEE Trans. Autom. Control 2021, 67, 2669–2676. [Google Scholar] [CrossRef]
- Liu, J.; Shen, X.; Alcaide, A.M.; Yin, Y.; Leon, J.I.; Vazquez, S.; Wu, L.; Franquelo, L.G. Sliding Mode Control of Grid-Connected Neutral-Point-Clamped Converters Via High-Gain Observer. IEEE Trans. Ind. Electron. 2022, 69, 4010–4021. [Google Scholar] [CrossRef]
- Tong, S.; Min, X.; Li, Y. Observer-based adaptive fuzzy tracking control for strict-feedback nonlinear systems with unknown control gain functions. IEEE Trans. Cybern. 2020, 50, 3903–3913. [Google Scholar] [CrossRef] [PubMed]
- Moradi, E.; Mohseni, R. Parameters estimation of linear frequency modulated signal using Kalman filter and its extended versions. Signal Image Video Process. 2022, 1–9. [Google Scholar] [CrossRef]
- Banazadeh, A.; Ghorbani, M. Frequency domain identification of the Nomoto model to facilitate Kalman filter estimation and PID heading control of a patrol vessel. Ocean Eng. 2013, 72, 344–355. [Google Scholar] [CrossRef]
- Perera, L.P.; Oliveira, P.; Soares, C.G. System identification of vessel steering with unstructured uncertainties by persistent excitation maneuvers. IEEE J. Ocean. Eng. 2015, 41, 515–528. [Google Scholar] [CrossRef]
- Erazo, C.; Angulo, F.; Olivar, G. Stability analysis of the extended state observers by Popov criterion. Theor. Appl. Mech. Lett. 2012, 2, 043006. [Google Scholar] [CrossRef]
- Shahsavar, A.; Bagherzadeh, S.A.; Mahmoudi, B.; Hajizadeh, A.; Afrand, M.; Nguyen, T.K. Robust Weighted Least Squares Support Vector Regression algorithm to estimate the nanofluid thermal properties of water/graphene Oxide–Silicon carbide mixture. Phys. A Stat. Mech. Its Appl. 2019, 525, 1418–1428. [Google Scholar] [CrossRef]
- Suykens, J.A.; De Brabanter, J.; Lukas, L.; Vandewalle, J. Weighted least squares support vector machines: Robustness and sparse approximation. Neurocomputing 2002, 48, 85–105. [Google Scholar] [CrossRef]
- Pearson, R.K. Outliers in process modeling and identification. IEEE Trans. Control Syst. Technol. 2002, 10, 55–63. [Google Scholar] [CrossRef]
- De Brabanter, K. Least Squares Support Vector Regression with Applications to Large-Scale Data: A Statistical Approach; Faculty of Engineering, KU Leuven, Katholieke Universiteit Leuven: Leuven, Belgium, 2011. [Google Scholar]
- Nomoto, K.; Taguchi, K. On steering qualities of ships (2). J. Zosen Kiokai 1957, 1957, 57–66. [Google Scholar] [CrossRef]
- Carrillo, S.; Contreras, J. Obtaining First and Second Order Nomoto Models of a Fluvial Support Patrol using Identification Techniques. Ship Sci. Technol. 2018, 11, 19–28. [Google Scholar] [CrossRef]
- Zheng, Q.; Gao, L.Q.; Gao, Z. On validation of extended state observer through analysis and experimentation. J. Dyn. Syst. Meas. Control 2012, 134, 024505. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhang, X.; Ding, F. Partially-coupled nonlinear parameter optimization algorithm for a class of multivariate hybrid models. Appl. Math. Comput. 2022, 414, 126663. [Google Scholar] [CrossRef]
- Li, C.; Chen, G.; Liang, G.; Luo, F.; Zhao, J.; Dong, Z.Y. Integrated optimization algorithm: A metaheuristic approach for complicated optimization. Inf. Sci. 2022, 586, 424–449. [Google Scholar] [CrossRef]
- Ezugwu, A.E.; Agushaka, J.O.; Abualigah, L.; Mirjalili, S.; Gandomi, A.H. Prairie dog optimization algorithm. Neural Comput. Appl. 2022, 1–49. [Google Scholar] [CrossRef]
- Lv, S.X.; Wang, L. Deep learning combined wind speed forecasting with hybrid time series decomposition and multi-objective parameter optimization. Appl. Energy 2022, 311, 118674. [Google Scholar] [CrossRef]
- Faltinsen, O.M. Hydrodynamics of High-Speed Marine Vehicles; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Himaya, A.N.; Sano, M.; Suzuki, T.; Shirai, M.; Hirata, N.; Matsuda, A.; Yasukawa, H. Effect of the loading conditions on the maneuverability of a container ship. Ocean Eng. 2022, 247, 109964. [Google Scholar] [CrossRef]
- Wang, S.; Wang, L.; Im, N.; Zhang, W.; Li, X. Real-time parameter identification of ship maneuvering response model based on nonlinear Gaussian Filter. Ocean Eng. 2022, 247, 110471. [Google Scholar] [CrossRef]
- Ma, H.; Ding, F.; Wang, Y. A novel multi-innovation gradient support vector machine regression method. ISA Trans. 2022. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Advantage | Disadvantage | Typical Study |
|---|---|---|---|
| LS | 1. easy to implement | 1. sensitive to outliers | [17] |
| 2. wide applications | 2. inconsistent estimates | ||
| NLS | 1. approximate linearization of the objective function | 1. identification value is unstable | [24] |
| 2. fast convergence, easy to implement | 2. local optimum | ||
| KF | 1. has a certain robustness | 1. external excitation is needed to be known | [18] |
| 2. strong versatility | 2. linearized dynamic systems make it difficult to apply to nonlinear systems | ||
| 3. initial value dependence | |||
| GPR | 1. working well on small datasets | 1. low sparsity | [20] |
| 2. provide uncertainty measurements on the predictions | 2. suitable initialization is required | ||
| BAS | simple and efficient | not stable | [21] |
| CMA-ES | applicable to nonlinear or non-convex continuous optimization problems | reasonable initialization is required to ensure its optimization performance, but hard to do | [22] |
| NI | 1. has a certain robustness | multi-innovation matrix inversion results in a large amount of computation | [23] |
| 2. converges faster for a certain input dimension | |||
| SVM | 1. has satisfactory robustness | 1. low sparsity of the solution | [19] |
| 2. guarantees global optimum | 2. some parameters need to be optimized reasonably | ||
| -SVM | 1. suitable for the nonlinear dynamic systems | 1. parameter drift problem | [25] |
| 2. easy to perform parameter optimization | 2. lowly applicable to strong nonlinear systems | ||
| RW-LSSVR | 1. robust to the condition with disturbance | low sparsity of the solution | [6] |
| 2. optimal initialization |
| Observer | Advantage | Disadvantage | Typical Study |
|---|---|---|---|
| ESO | straightforward to implement | suitable settings of gains are required | [29,30,33] |
| LO | simple design | restricted to the deterministic case | [34,35] |
| KF | used for the stochastic case | not all states can be estimated | [40] |
| SMO | has a strong robustness | suffers from the chattering problem. | [36] |
| HGO | simple structure and easy tuning | sensitive to existing measurement noise | [38] |
| FSO | flexible design | the gain vector requires strict setting | [39] |
| DETO | applicable to the high-order uncertain nonlinear systems | relatively high computational cost | [37] |
| Different | Cargo | Patrol | Same | Cargo | Patrol |
|---|---|---|---|---|---|
| (s) | 45.0 | 2.0875 | 180 | ||
| (s) | 6.0 | 0.3179 | 12,150 | ||
| (s) | 10.0 | 0.1830 | 100 | ||
| () | 0.09 | −0.1724 | 364,500 | ||
| (s) | 5 | 1 | 4,100,625 | ||
| 0.12 | 0.7 | Employed bees | 30 | ||
| Simulation Time (s) | 6000 | 900 | Onlooker bees | 30 | |
| Total Samples | 300,000 | 45,000 | Sources | 30 | |
| 35 | |||||
| Max iteration | 30 | ||||
| Number of parameters | 1 | ||||
| Search domain | |||||
| 0.02 s | |||||
| Index | State | ESO | EKF | ||
|---|---|---|---|---|---|
| Cargo | Patrol | Cargo | Patrol | ||
| RMSE | |||||
| - | - | - | - | ||
| 1.0000 | 1.0000 | 0.9902 | 0.9953 | ||
| 0.9999 | 1.0000 | 0.9970 | 9010 | ||
| 0.9732 | 0.9651 | 0.9469 | 0.9341 | ||
| 1.0000 | 1.0000 | 0.8919 | 0.8557 | ||
| - | - | - | - | ||
| Parameter | Nominal | Identified (RW-LSSVR) | Identified (LSSVR) | Relative Error (%) (RW-LSSVR) | Relative Error (%) (LSSVR) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Cargo | Patrol | Cargo | Patrol | Cargo | Patrol | Cargo | Patrol | Cargo | Patrol | |
| (s) | 45 | 2.0875 | 46.21 | 2.0896 | 46.93 | 2.0231 | 2.689 | 0.1006 | 4.289 | −3.085 |
| (s) | 6.0 | 0.3179 | 5.960 | 0.3035 | 6.09 | 0.297 | −0.6667 | −4.530 | 1.5 | −6.574 |
| (s) | 10 | 0.1830 | 9.751 | 0.1840 | 9.932 | 0.1921 | −2.49 | 0.5464 | −0.68 | 4.973 |
| () | 0.090 | −0.1724 | 0.095 | −0.1837 | 0.087 | −0.189 | 5.23 | 6.4721 | −3.333 | 9.629 |
| Index | RW-LSSVR | LSSVR | ||
|---|---|---|---|---|
| Cargo | Patrol | Cargo | Patrol | |
| (, rad/s) | 9.9232 | 544.53 | 17.454 | 789.04 |
| 0.9978 | 0.9974 | 0.9961 | 0.9963 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, M.; Sun, W.; Wen, Y.; Huang, L. Extended State Observer-Based Parameter Identification of Response Model for Autonomous Vessels. J. Mar. Sci. Eng. 2022, 10, 1291. https://doi.org/10.3390/jmse10091291
Zhu M, Sun W, Wen Y, Huang L. Extended State Observer-Based Parameter Identification of Response Model for Autonomous Vessels. Journal of Marine Science and Engineering. 2022; 10(9):1291. https://doi.org/10.3390/jmse10091291
Chicago/Turabian StyleZhu, Man, Wuqiang Sun, Yuanqiao Wen, and Liang Huang. 2022. "Extended State Observer-Based Parameter Identification of Response Model for Autonomous Vessels" Journal of Marine Science and Engineering 10, no. 9: 1291. https://doi.org/10.3390/jmse10091291