
Near-Optimal Control for Offshore Structures with Nonlinear Energy Sink Mechanisms


Abstract
:1. Introduction
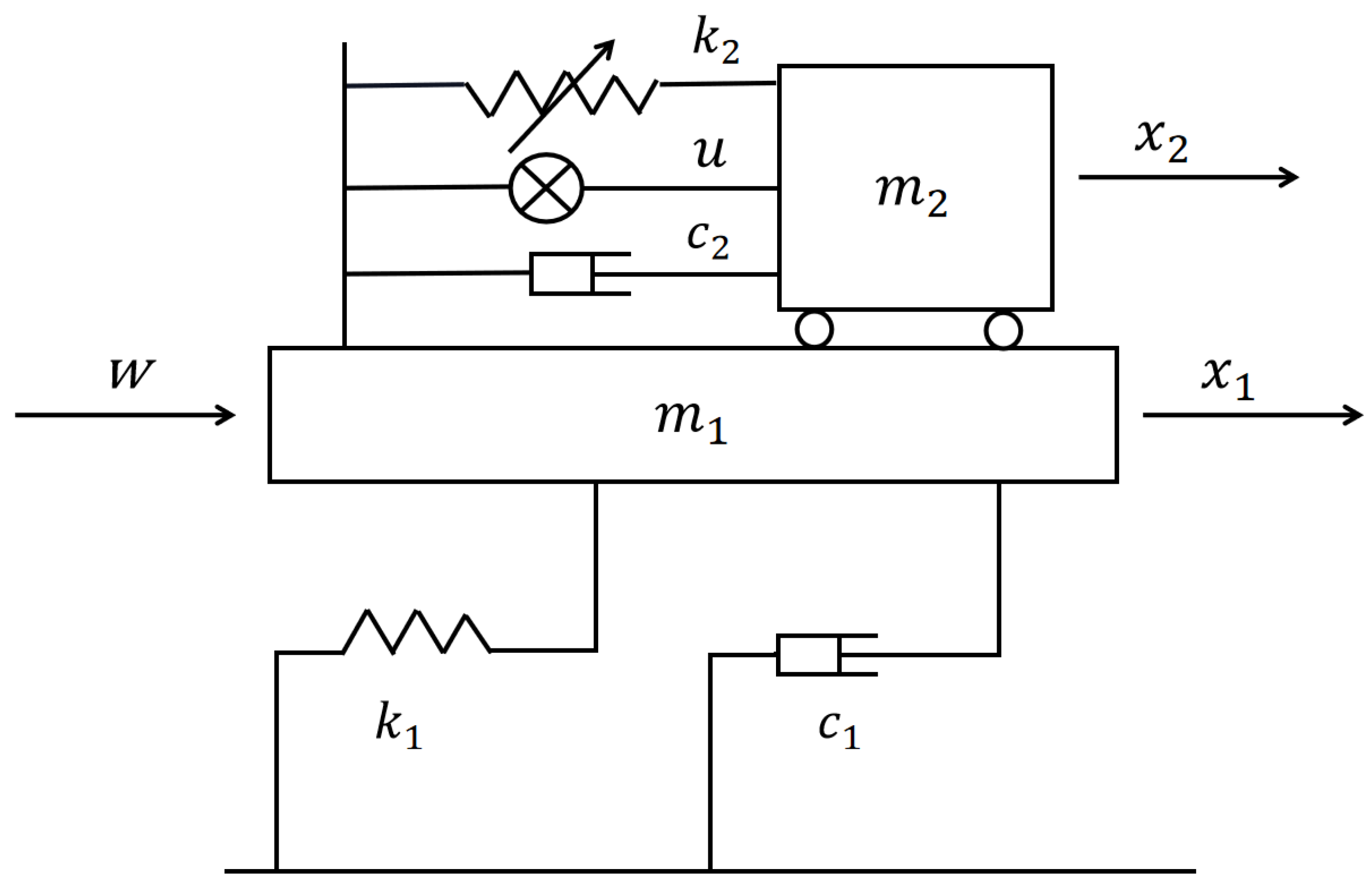
2. Problem Formulation
3. Design of NES-Based Near-Optimal Controller
3.1. NES-Based Optimal Controller Design
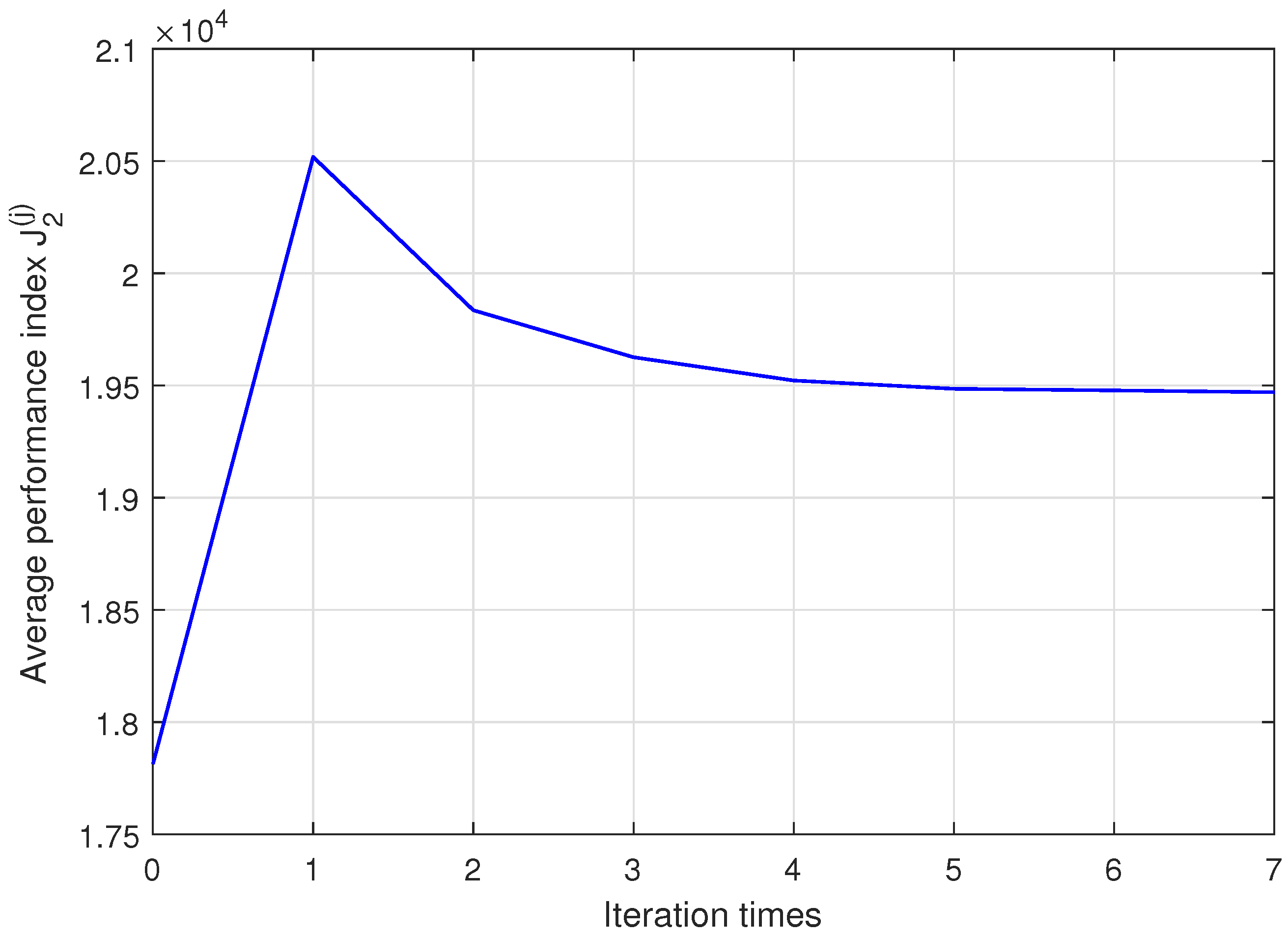
3.2. Computation of NES-Based Near-Optimal Controllers
| Algorithm 1: An iterative algorithm. |
Step 1. Given a small enough number . Set and . Step 3. Solve Equations (29) and (28) to obtain the initial iteration values of and , set , . Then compute by (48) and by (49), respectively. Step 4. Let , and solve Equations (35), (38) and (34) to obtain the j-th iterative values of , , and , respectively. Step 6. Compute . If , then go to Step 4; If , the j-th iteration values of and are near-optimal control law and near-optimal state, respectively, and then complete the iteration. |
4. Simulation Results
4.1. Parameters of Offshore Structure with the NES
4.2. Simulation of Regular and Irregular Wave Force
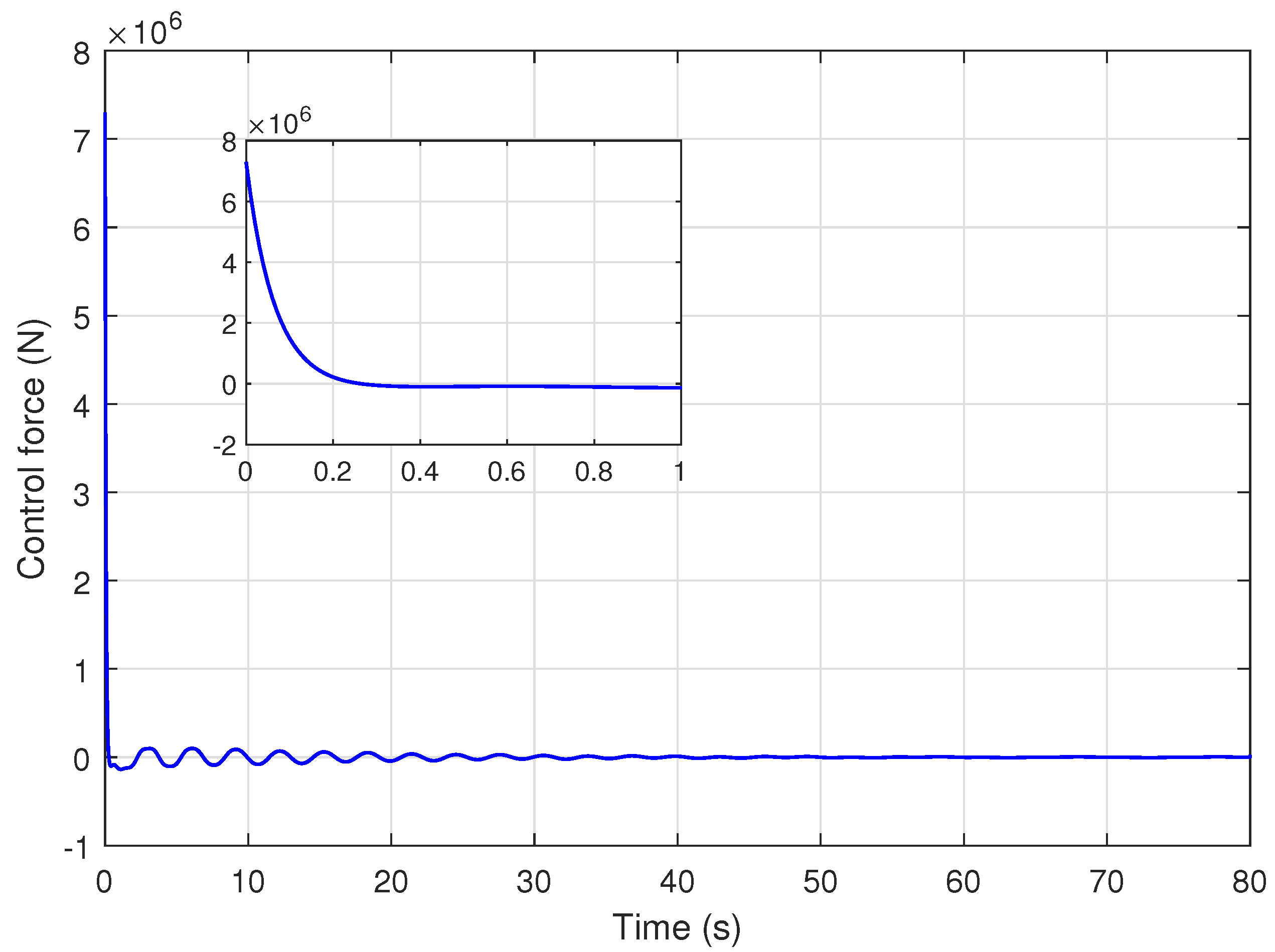
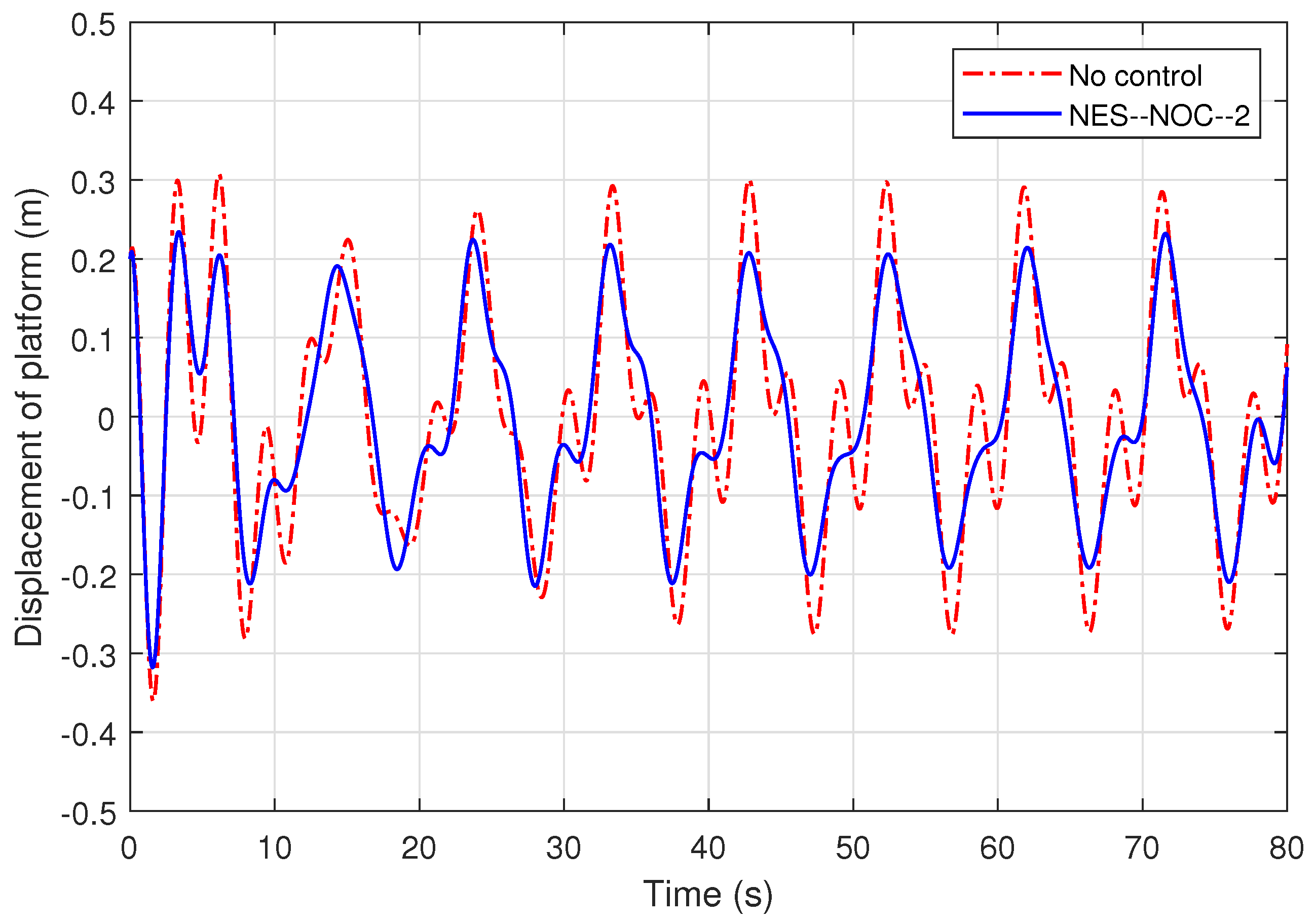
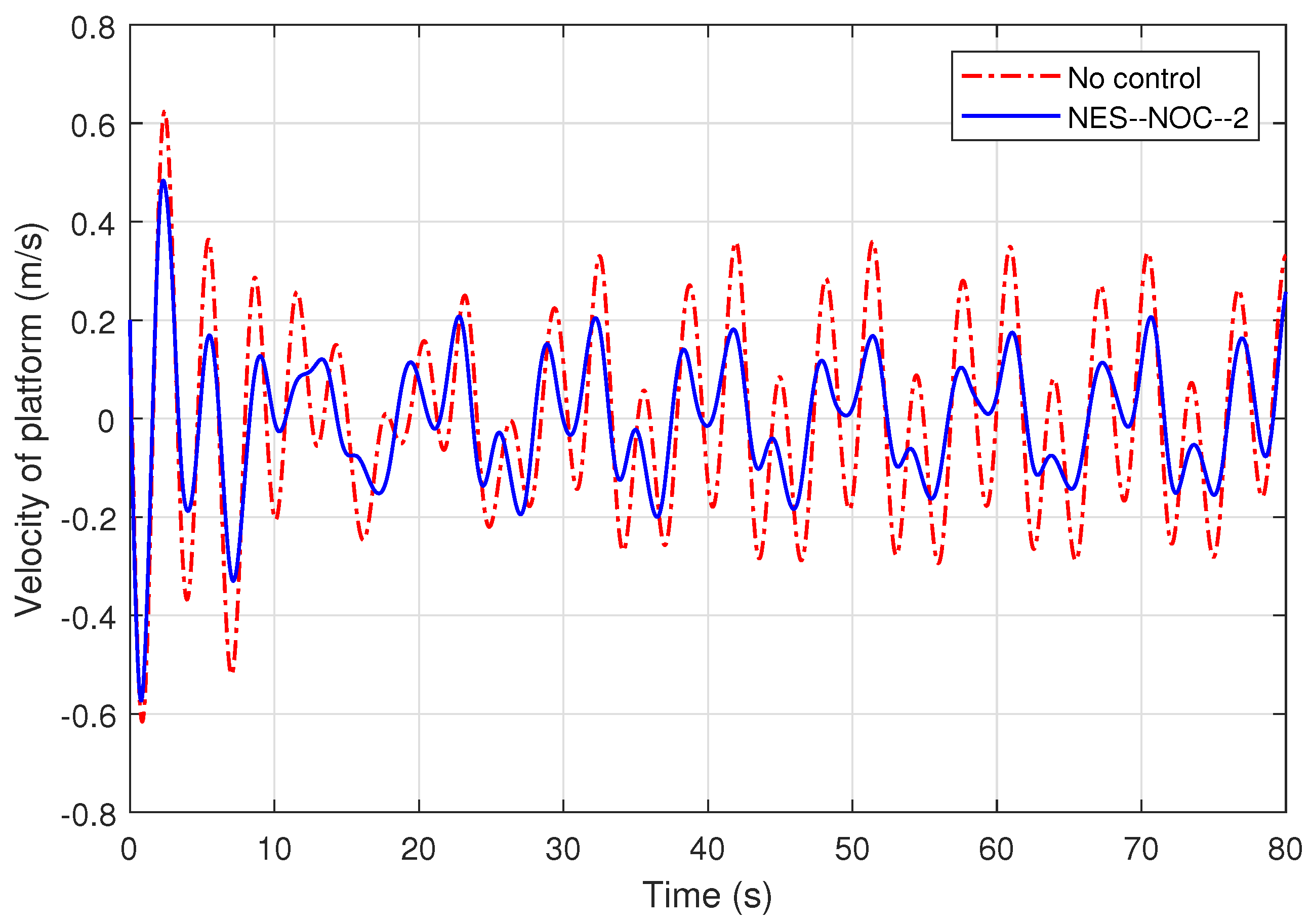
4.3. Performance of Structure with NES-Based Near-Optimal Controllers
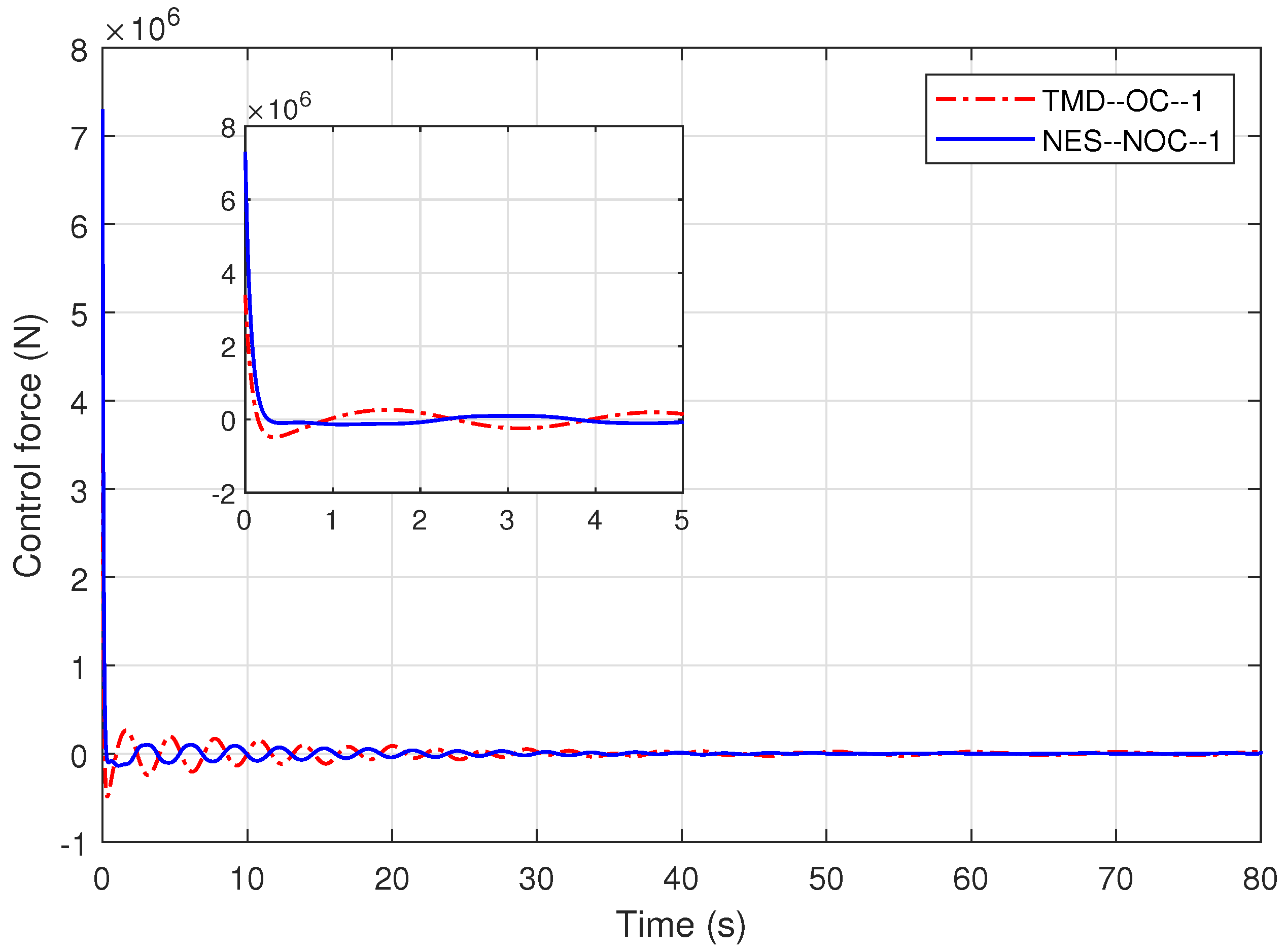
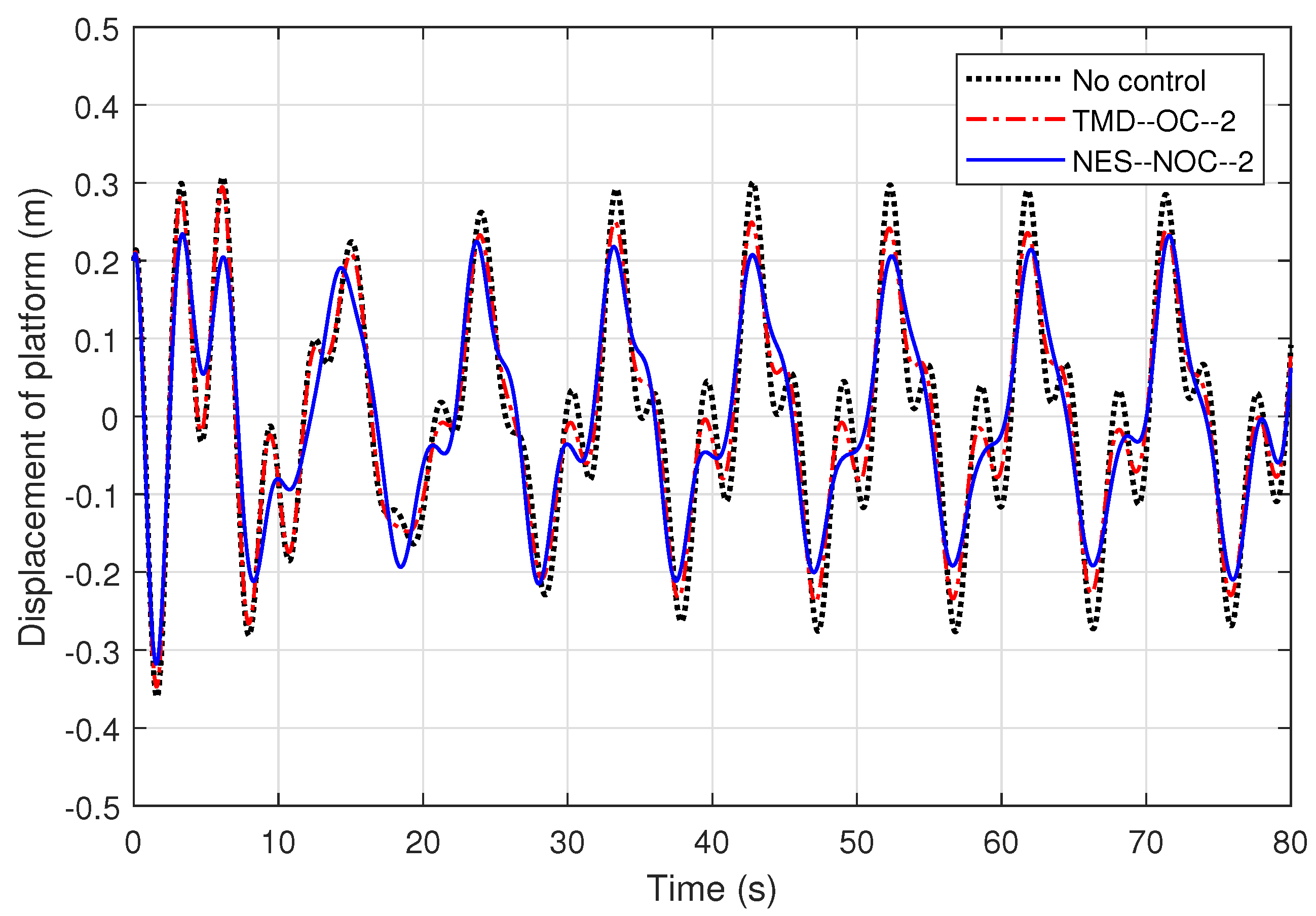
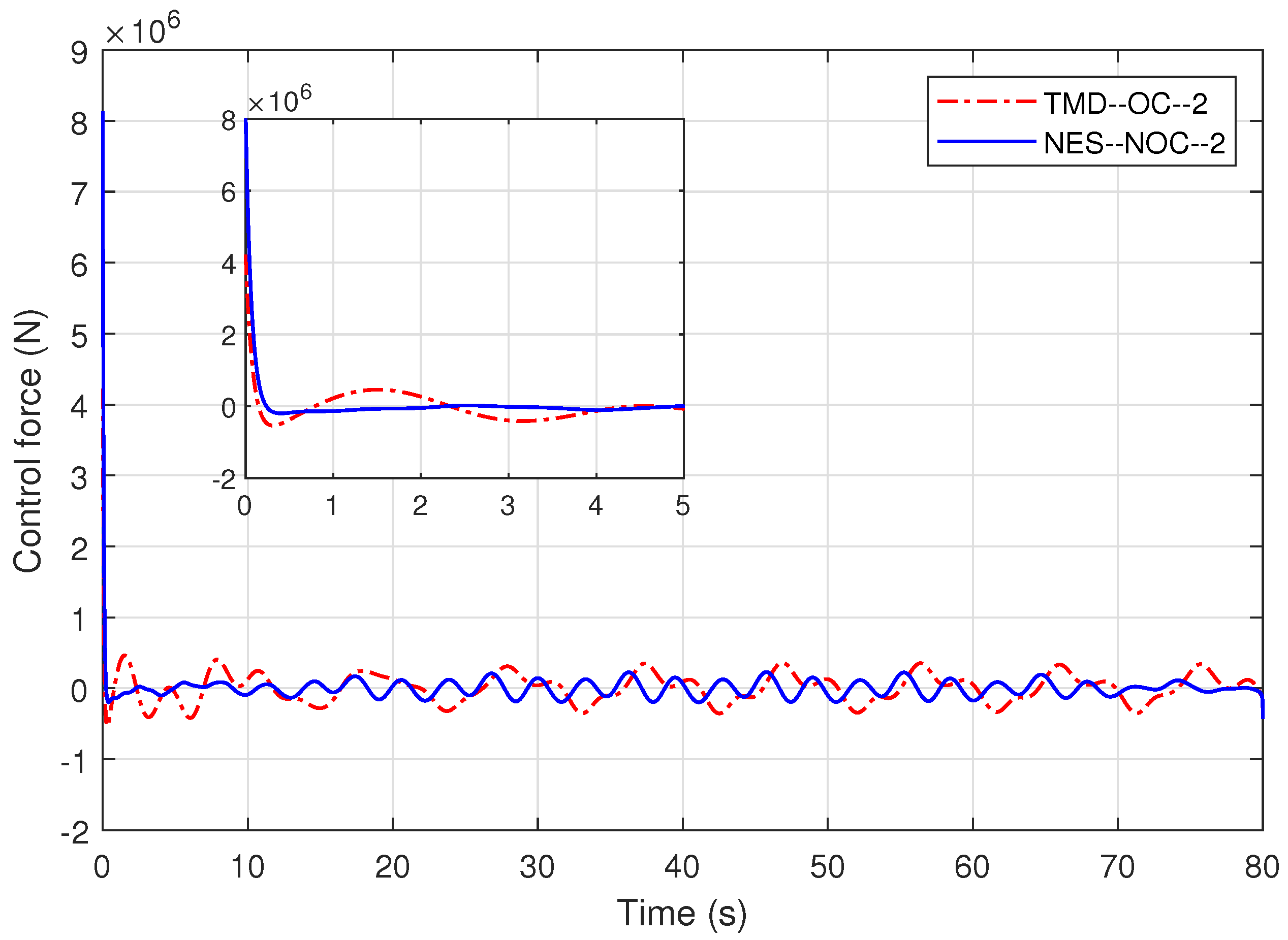
4.4. Comparisons between NES-Based Near-Optimal Controller and TMD-Based Optimal Controller
5. Conclusions
- The active NES mechanism can be used to attenuate the vibration of the offshore structure. Based on the NES mechanism, the designed optimal controller can reduce the displacement and velocity of the structure remarkably.
- Compared with the tuned mass damper (TMD) mechanism, the NES-based near-optimal controllers are better than the TMD-based optimal controllers to improve the performance of the offshore structure.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zribi, M.; Almutairi, N.; Abdel-Rohman, M.; Terro, M. Nonlinear and robust control schemes for offshore steel jacket platforms. Nonlinear Dyn. 2004, 35, 61–80. [Google Scholar] [CrossRef]
- Qiao, D.; Li, B.; Yan, J.; Qin, Y.; Liang, H.; Ning, D. Transient responses evaluation of FPSO with different failure scenarios of mooring lines. J. Mar. Sci. Eng. 2021, 9, 103. [Google Scholar] [CrossRef]
- Feng, H.-N.; Zhang, B.-L.; Li, Q.; Tang, G.-Y. Delayed fuzzy output feedback H∞ control for offshore structures. J. Mar. Sci. Eng. 2020, 8, 434. [Google Scholar] [CrossRef]
- Li, B. Operability study of walk-to-work for floating wind turbine and service operation vessel in the time domain. Ocean Eng. 2021, 220, 108397. [Google Scholar] [CrossRef]
- Kazemy, A. Robust mixed H∞/passive vibration control of offshore steel jacket platforms with structured uncertainty. Ocean Eng. 2017, 139, 95–102. [Google Scholar] [CrossRef]
- Ma, H.; Tang, G.-Y.; Hu, W. Feedforward and feedback optimal control with memory for offshore platforms under irregular wave forces. J. Sound Vib. 2009, 328, 369–381. [Google Scholar] [CrossRef]
- Sakthivel, R.; Santra, S.; Kaviarasan, B.; Park, J.H. Finite-time sampled-data control of permanent magnet synchronous motor systems. Nonlinear Dyn. 2016, 86, 2081–2092. [Google Scholar] [CrossRef]
- Huang, S.; Cai, M.; Xiang, Z. Robust sampled-data H∞ control for offshore platforms subject to irregular wave forces and actuator saturation. Nonlinear Dyn. 2017, 88, 2705–2721. [Google Scholar] [CrossRef]
- Zhang, X.-M.; Han, Q.-L.; Han, D. Effects of small time-delays on dynamic output feedback control of offshore steel jacket structures. J. Sound Vib. 2011, 330, 3883–3900. [Google Scholar] [CrossRef]
- Zhang, B.-L.; Han, Q.-L.; Zhang, X.-M.; Yu, X. Sliding mode control with mixed current and delayed states for offshore steel jacket platforms. IEEE Trans. Control Syst. Technol. 2014, 22, 1769–1783. [Google Scholar] [CrossRef]
- Zhang, B.-L.; Han, Q.-L.; Zhang, X.-M. Event-triggered H∞ reliable control for offshore structures in network environments. J. Sound Vib. 2016, 368, 1–21. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, H.; Xu, J. Neural network-based fuzzy vibration controller for offshore platform with random time delay. Ocean Eng. 2021, 225, 108733. [Google Scholar] [CrossRef]
- Kandasamy, R.; Cui, F.; Townsend, N.; Foo, C.C.; Guo, J.; Shenoi, A.; Xiong, Y. A review of vibration control methods for marine offshore structures. Ocean Eng. 2016, 127, 279–297. [Google Scholar] [CrossRef]
- Zhang, B.-L.; Han, Q.-L.; Zhang, X.-M. Recent advances in vibration control of offshore platforms. Nonlinear Dyn. 2017, 89, 755–771. [Google Scholar] [CrossRef]
- Zhang, B.-L.; Han, Q.-L.; Zhang, X.-M.; Tang, G.-Y. Active Control of Offshore Steel Jacket Platforms, 1st ed.; Springer: Singapore, 2019. [Google Scholar]
- Zhang, B.-L.; Cao, E.-Z.; Cai, Z.; Su, H.; Tang, G.-Y. Event-triggered H∞ control for networked spar-type floating production platforms with active tuned heave plate mechanisms and deception attacks. J. Franklin Inst. 2021, 358, 3554–3584. [Google Scholar] [CrossRef]
- Vakakis, A.F. Inducing passive nonlinear energy sinks in vibrating systems. J. Vib. Acoust. 2001, 123, 324–332. [Google Scholar] [CrossRef]
- Tripathi, A.; Grover, P.; Kalmar-Nagy, T. On optimal performance of nonlinear energy sinks in multiple-degree-of-freedom systems. J. Sound Vib. 2017, 388, 272–297. [Google Scholar] [CrossRef] [Green Version]
- Gomez, F.; Fermandois, G.A.; Spencer, B.F. Optimal design of nonlinear energy sinks for mitigation of seismic response on structural systems. Eng. Struct. 2021, 232, 111756. [Google Scholar] [CrossRef]
- Tsiatas, G.C.; Charalampakis, A.E.; Tsopelas, P. A comparative study of linear and nonlinear mass damping systems under seismic excitation. Eng. Struct. 2020, 219, 110926. [Google Scholar] [CrossRef]
- Zhao, G.; Raze, G.; Paknejad, A.; Deraemaeker, A.; Kerschen, G.; Collette, C. Active nonlinear energy sink using force feedback under transient regime. Nonlinear Dyn. 2020, 102, 1319–1336. [Google Scholar] [CrossRef]
- Dekemele, K.; De Keyser, R.; Loccufier, M. Performance measures for targeted energy transfer and resonance capture cascading in nonlinear energy sinks. Nonlinear Dyn. 2018, 93, 259–284. [Google Scholar] [CrossRef]
- Dekemele, K.; Van Torre, P.; Loccufier, M. Design, construction and experimental performance of a nonlinear energy sink in mitigating multi-modal vibrations. J. Sound Vib. 2020, 473, 115243. [Google Scholar] [CrossRef]
- Tsiatas, G.C.; Charalampakis, A.E. A new hysteretic nonlinear energy sink. Commun. Nonlinear Sci. Numer. Simul. 2018, 60, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Habib, G.; Romeo, R. The tuned bistable nonlinear energy sink. Nonlinear Dyn. 2017, 89, 179–196. [Google Scholar] [CrossRef]
- Zang, J.; Yuan, T.C.; Lu, Z.Q.; Zhang, Y.W.; Ding, H.; Chen, L.Q. A lever-type nonlinear energy sink. J. Sound Vib. 2018, 437, 119–134. [Google Scholar] [CrossRef]
- Sun, Y.H.; Zhang, Y.W.; Ding, H.; Chen, L.Q. Nonlinear energy sink for a flywheel system vibration reduction. J. Sound Vib. 2018, 429, 305–324. [Google Scholar] [CrossRef]
- Zhao, X.Y.; Zhang, Y.W.; Ding, H.; Chen, L.Q. Vibration suppression of a nonlinear fluid-conveying pipe under harmonic foundation displacement excitation via nonlinear energy sink. Int. J. Appl. Mech. 2019, 10, 1850096. [Google Scholar] [CrossRef]
- Pacheco, D.R.Q.; Marques, F.D.; Ferreira, A.J.M. Panel flutter suppression with nonlinear energy sinks: Numerical modeling and analysis. Int. J. Non-Linear Mech. 2018, 106, 108–114. [Google Scholar] [CrossRef]
- Jiang, X.; McFarland, D.M.; Bergman, L.A.; Vakakis, A.F. Steady state passive nonlinear energy pumping in coupled oscillators: Theoretical and experimental results. Nonlinear Dyn. 2003, 33, 87–102. [Google Scholar] [CrossRef]
- Zhang, Z.; Ding, H.; Zhang, Y.-W.; Chen, L.-Q. Vibration suppression of an elastic beam with boundary inerter-enhanced nonlinear energy sinks. Acta Mech. Sin. Lixue Xuebao 2021, 37, 387–401. [Google Scholar] [CrossRef]
- Zuo, H.; Zhu, S. Development of novel track nonlinear energy sinks for seismic performance improvement of offshore wind turbine towers. Mech. Syst. Signal Process. 2022, 172, 108975. [Google Scholar] [CrossRef]
- Zuo, H.; Zhang, J.; Yuan, G.-K.; Zhu, S. Wind- and sea wave-induced response mitigations of offshore wind turbines using track nonlinear energy sinks. Struct. Control Health Monit. 2022. in Press. [Google Scholar] [CrossRef]
- Zheng, Z.Q.; Yao, Z.P.; Chang, Z.Y. Vibration control of jacket offshore platform under random waveload based on nonlinear energy sink. Period. Ocean. Univ. China 2021, 51, 103–110. (In Chinese) [Google Scholar]
- Tang, G.-Y.; Sun, H.; Pang, H. Approximately optimal tracking control for discrete time-delay systems with disturbances. Prog. Nat. Sci. 2008, 18, 225–231. [Google Scholar] [CrossRef]
- Li, H.J.; James Hu, S.L.; Jakubiak, C. H2 active vibration control for offshore platform subjected to wave loading. J. Sound Vib. 2003, 263, 709–724. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| j | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|---|
| 3138.9 | 5745.7 | 4939.8 | 4709.5 | 4594.6 | 4553.5 | 4545.5 | 4535.5 | |
| 17,813 | 20,519 | 19,835 | 196,26 | 19,522 | 19485 | 19,478 | 19,470 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Du, X.; Zhang, B.-L.; Cai, Z.; Zheng, Z. Near-Optimal Control for Offshore Structures with Nonlinear Energy Sink Mechanisms. J. Mar. Sci. Eng. 2022, 10, 817. https://doi.org/10.3390/jmse10060817
Chen W, Du X, Zhang B-L, Cai Z, Zheng Z. Near-Optimal Control for Offshore Structures with Nonlinear Energy Sink Mechanisms. Journal of Marine Science and Engineering. 2022; 10(6):817. https://doi.org/10.3390/jmse10060817
Chicago/Turabian StyleChen, Wei, Xingyu Du, Bao-Lin Zhang, Zhihui Cai, and Zhongqiang Zheng. 2022. "Near-Optimal Control for Offshore Structures with Nonlinear Energy Sink Mechanisms" Journal of Marine Science and Engineering 10, no. 6: 817. https://doi.org/10.3390/jmse10060817