1. Introduction
Due to increasing emissions of greenhouse gases, global warming, and energy conservation have become long-term international issues, which must be successfully addressed in the near future to allow the continued growth of all industries. The International Maritime Organization (IMO) decided that the estimation of the energy efficiency design index must be completed for newly built ships by shipbuilders and ship classification societies in the ship design stage and must be verified during sea trials in July 2011 (Annex VI of the MARPOL [
1]). In addition, the IMO adopted a greenhouse gas (GHG) reduction strategy in 2018 [
2]. The aim of this strategy is to reduce the total GHG emissions produced by ships by more than 50% by 2050 as compared with the GHG emissions in 2008. Therefore, the development of ships with low resistance and high propulsive performance is required.
To evaluate a ship’s hydrodynamic performance, it is necessary to employ computational fluid dynamics (CFD), which has become an indispensable research and design tool [
3] for optimizing the hydrodynamic forces and wake distribution. The selection of a turbulence model is important for the use of CFD. Blanca Pena et al. [
4] reviewed the capability, limitation, computation cost, and accuracy of turbulence models for ship CFD. This paper reviewed that the Reynolds-averaged Navier–Stokes (RANS) calculations were sufficiently accurate for the estimation of integral hydrodynamic forces and moment at both the model-scale and full scale. However, RANS is inadequate for detailed velocity and vorticity evaluations. The CFD Workshop 2015 [
5] discussed the differences in wake flow due to turbulence models. The wake distribution and viscous resistance of JBC calculated by various turbulence models were compared and discussed. This workshop concluded that the
k–omega shear-stress transport (SST) turbulence model underestimates the longitudinal vorticity at a location in front of a ship’s propeller, whereas the Reynolds stress model (RSM) slightly overestimates it. The explicit algebraic stress model (EASM) provides a good compromise regarding the local flow, although this model slightly underestimates the vorticity at the same location. Though the LES is promising, its wake distributions overpredicted the vorticity. Various turbulence modeling studies have been conducted since this workshop was held.
Generally, RANS-based CFD calculation using a two-equation turbulence model, such as the
k–omega SST model, is the mainstream method to estimate the viscous resistance of a model-scale ship. The two-equation model uses an eddy viscosity model to represent the Reynolds stress in the RANS equations. This approach relates the Reynolds stress to the mean velocity gradients. Momchil Terziev et al. [
6] reported that the standard
k–omega model is a good choice for resistance calculations in the case of shallow water. Meanwhile, CFD calculations based on the RSM solved the Reynolds stress more rigorously with seven equations for the two equations of the eddy viscosity model. The EASM is an improved version of the two-equation turbulence model and belongs to the class of nonlinear eddy viscosity models.
Visonneau et al. [
7] conducted CFD verification using an EASM, and this paper obtained useful information about the EASM. The EASM provides a better prediction of viscous resistance evaluation than the
k–omega SST model. However, the EASM underestimates the viscous resistance by approximately 4% and 3% without energy-saving devices (ESD) and with ESD, respectively, and the calculated longitudinal vorticity is slightly weaker than the measured vorticity.
Recently, Gaggero et al. [
8] studied the calculation accuracy of the wake distribution of the Korea Research Institute for Ships and Ocean (KRISO) container ship (KCS) model using different turbulence models. The superiority of the RSM was confirmed by conducting calculations using five turbulence models (Spalart–Allmaras (S–A),
k–ε,
k–omega SST, RSM–LPS, and RSM–quadratic pressure-strain (QPS)). The standard two-equation models correctly predicted the boundary layer velocity reduction; however, they failed to reliably compute the vortex positioned under the propeller hub. Conversely, the Reynolds stress transport (RST)–LPS model reasonably predicted the vortex core velocity reduction but strongly underestimated the ship boundary layer. Only the RST–QPS model simultaneously predicted the entire hull wake features, even if still slightly underestimating the wake peak at the 0° position. Furthermore, the different accuracy levels of the turbulence models were confirmed by the calculated wake fraction values, confirming the superiority of the RST–QPS model in dealing with such complex flows. They showed the excellent capability of RSM–LPS and RSM–QPS by evaluating the different characteristics of various turbulence models.
Furthermore, Farkas et al. [
9] reported a model-scale ship example and full-scale CFD calculation examples using the RSM to calculate the Reynolds stress more accurately. The RSM was used for each model-scale ship, and the limited features of the RSM were reported. However, the study of different RSM examples was not sufficient. In addition, CFD calculations were performed only for the hull form of a bulk carrier, and there was no discussion on the hull form differences when the RSM was used. From an engineering viewpoint, it is extremely important to know the RSM characteristics when applied to various ship hull form types.
Meanwhile, Nishikawa et al. [
10] calculated the KRISO very large crude carrier 2 (KVLCC2) hull forms using high-definition wall-resolved large eddy simulation (WRLES). Generally, WRLES is expected to calculate the viscous resistance and the wake distribution with high accuracy because it solves the turbulence directly using the subgrid model scale. Although WRLES is necessary to generate a small grid to capture the local flow in detail, the time step needs to be very small. The WRLES is able to calculate detailed flow around the hull surface used by high-performance computing(HPC); however, it is an expensive CFD technique for design. Kornev et al. [
11] reported comparative calculations of a JBC at the model scale using improved delayed detached eddy simulation (IDDES) and
k–omega SST. IDDES and
k–omega SST showed almost the same results for the prediction accuracy of viscous resistance. However, IDDES had difficulty reproducing the turbulent transport in zones of unsteady-RANS and LES, so the result of the frictional resistance was 15% smaller than that of the International Towing Tank Conference (ITTC) 1957 line. Thus, IDDES needs further study. Liefvendahl and Johansson [
12] compared the calculation results of the boundary layer thickness of a JBC by WRLES and RANS. However, more detailed verification and validation (V&V) are needed because viscous resistance and wake distribution have not been compared. The RSM is used with practical computational resources for design purposes. Therefore, at the design level, there is a need for the RSM that can calculate the viscous resistance and the wake distribution with high accuracy; this can be performed with current computational resources.
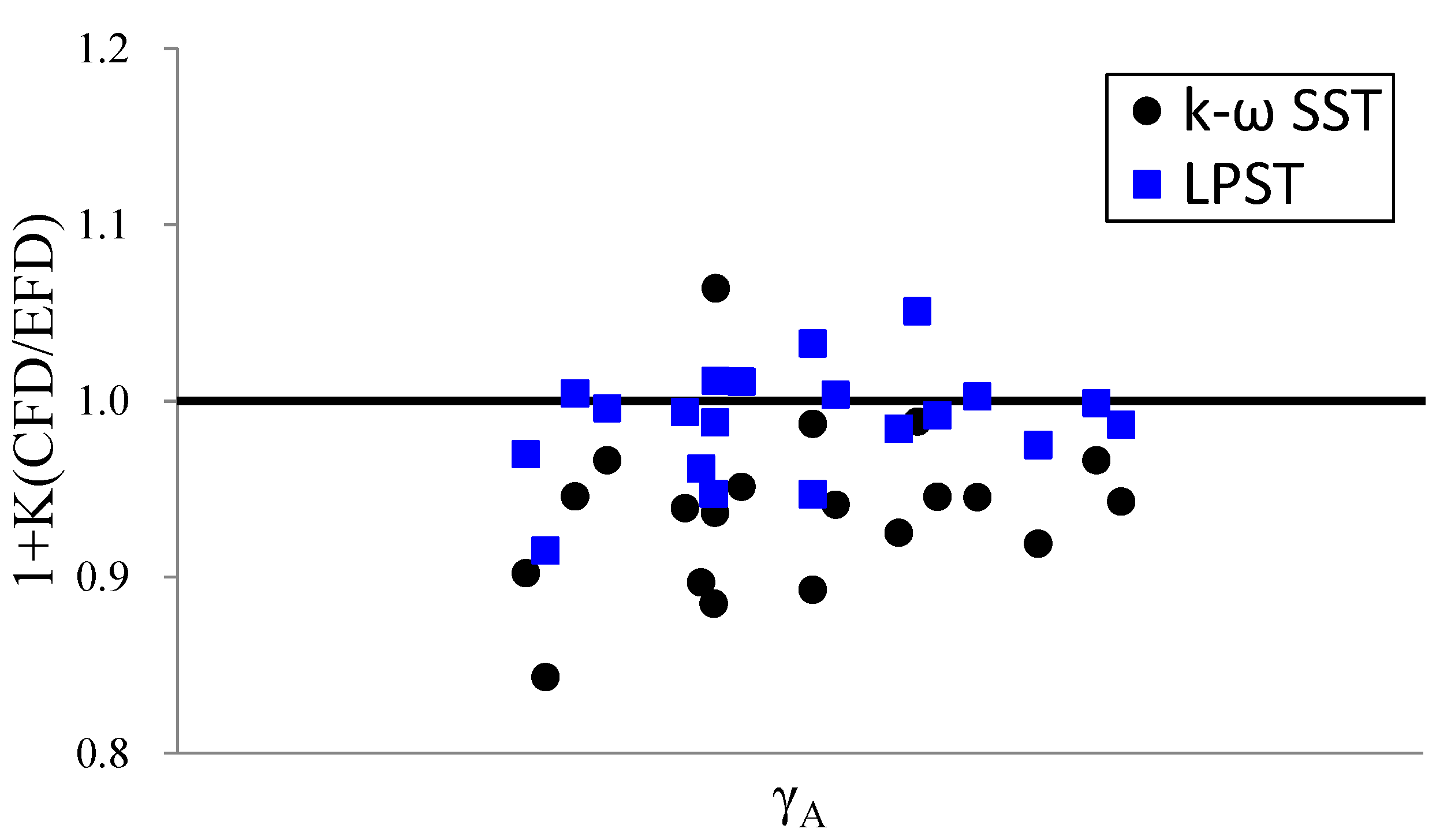
Considering the above, this paper confirms that the RSM has sufficient estimation accuracy of viscous resistance and wake distribution at the hull design stage. We calculated a JBC to compare the viscous resistance and wake distribution using k–omega SST and four RSM types. A JBC is a full-hull ship with a strong axial vortex. Therefore, it is suitable for evaluating the viscous resistance and wake distribution. The V&V is also calculated to study the grid dependency on the viscous resistance in this case. Furthermore, we compared the wake distribution of each RSM at the propeller plane. Finally, the best RSM was applied to 20 ships with various full and fine hull forms to calculate viscous resistance and compare it with the experimental results. For industrial use, this study could provide an important insight into the designing of various types of vessels.
2. Validation of Turbulence Models
To evaluate the ability of the RSM to estimate a ship’s flow, the uncertainty of the estimated viscous resistance due to turbulence modeling must be calculated using the V&V method. Fred Stern et al. [
13] defined verification as the process of evaluating the numerical uncertainty, while validation is defined as the process of evaluating the model uncertainty. Herein, verification is performed using three types of a nonuniformly refined calculation grid, while validation is performed to evaluate the accuracy of
using the benchmark experimental data.
2.1. Computational Conditions
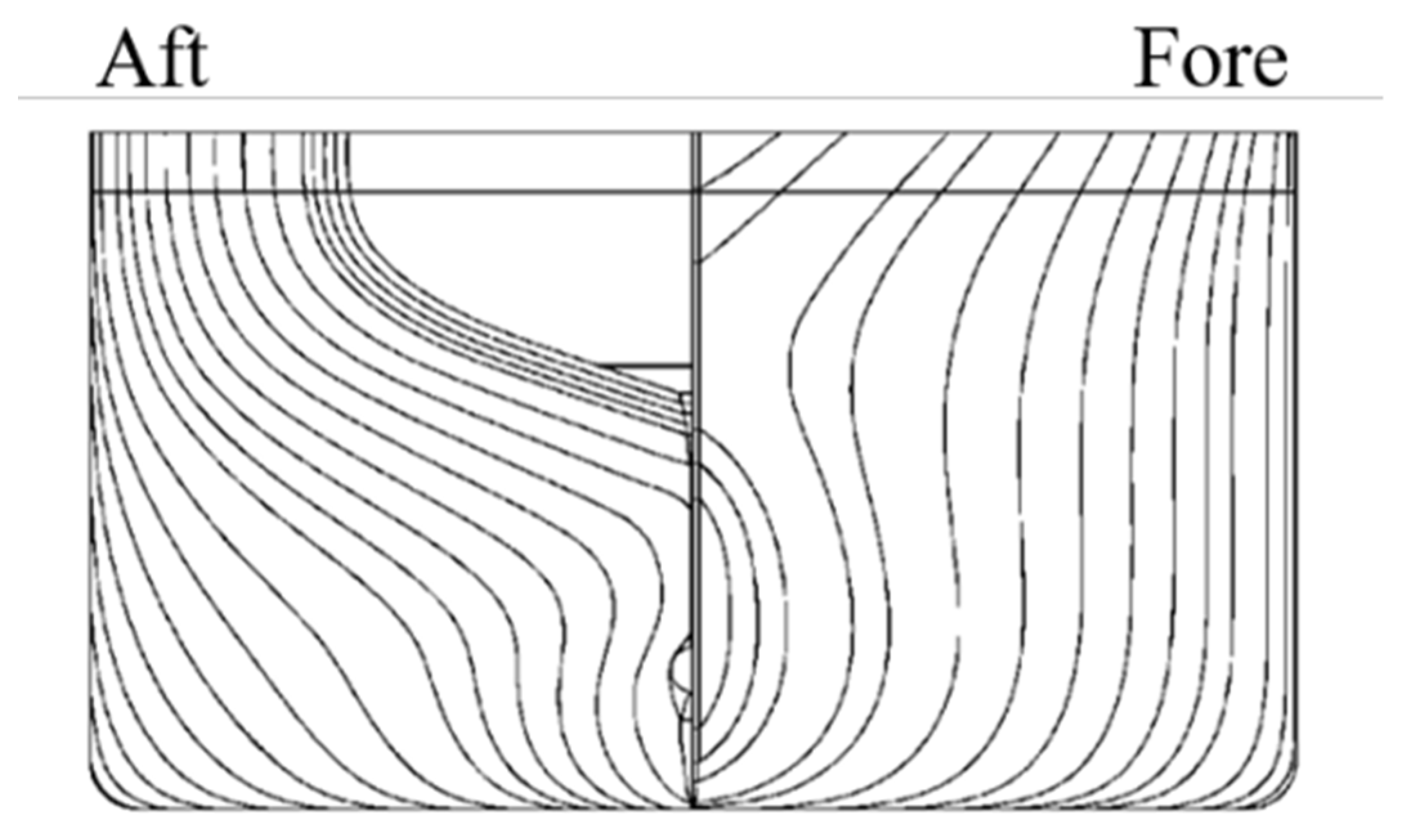
A JBC’s hull form was employed for validating the turbulence models. A JBC was designed by the National Maritime Research Institute (NMRI) in Japan. It was used to obtain CFD validation data, which were open to the public in the CFD Workshop 2015 held in Tokyo [
5]. A JBC bodyplan is shown in
Figure 1. The right side is the forepart, and the left side is the aft part. The principal dimensions of a JBC and the CFD calculations, which were performed on a model-scale ship, are shown in
Table 1.
The CFD calculations were performed using a STAR-CCM+ ver14.04, which is capable of solving the RANS equations of the
k–omega SST model [
14] and the RSM equation. The RSM variations, such as the LPS model, LPST model, QPS model, and elliptic blending (EB) model, were applied to investigate their ability to estimate the viscous resistance and wake distributions. The LPS model, which was proposed by Gibson and Launder [
15], is the most basic RSM model employing a wall function. The LPST model was proposed by Rodi [
16] that uses a model coefficient for the pressure-strain correlation term reported by Launder and Shima [
17]. Generally, the LPST model provides more accurate calculations than the LPS model. In the QPS model, which was proposed by Speziale et al. [
18], the high-order expansion of the pressure-strain correlation term is cut off. The EB model, which was proposed by Manceau and Hanjalić [
19], is a low Reynolds–number model based on the formulation of the quasilinear QPS term near an inhomogeneous wall surface. An improved version of this model, which was proposed by Lardeau and Manceau [
20], was implemented in the STAR-CCM+.
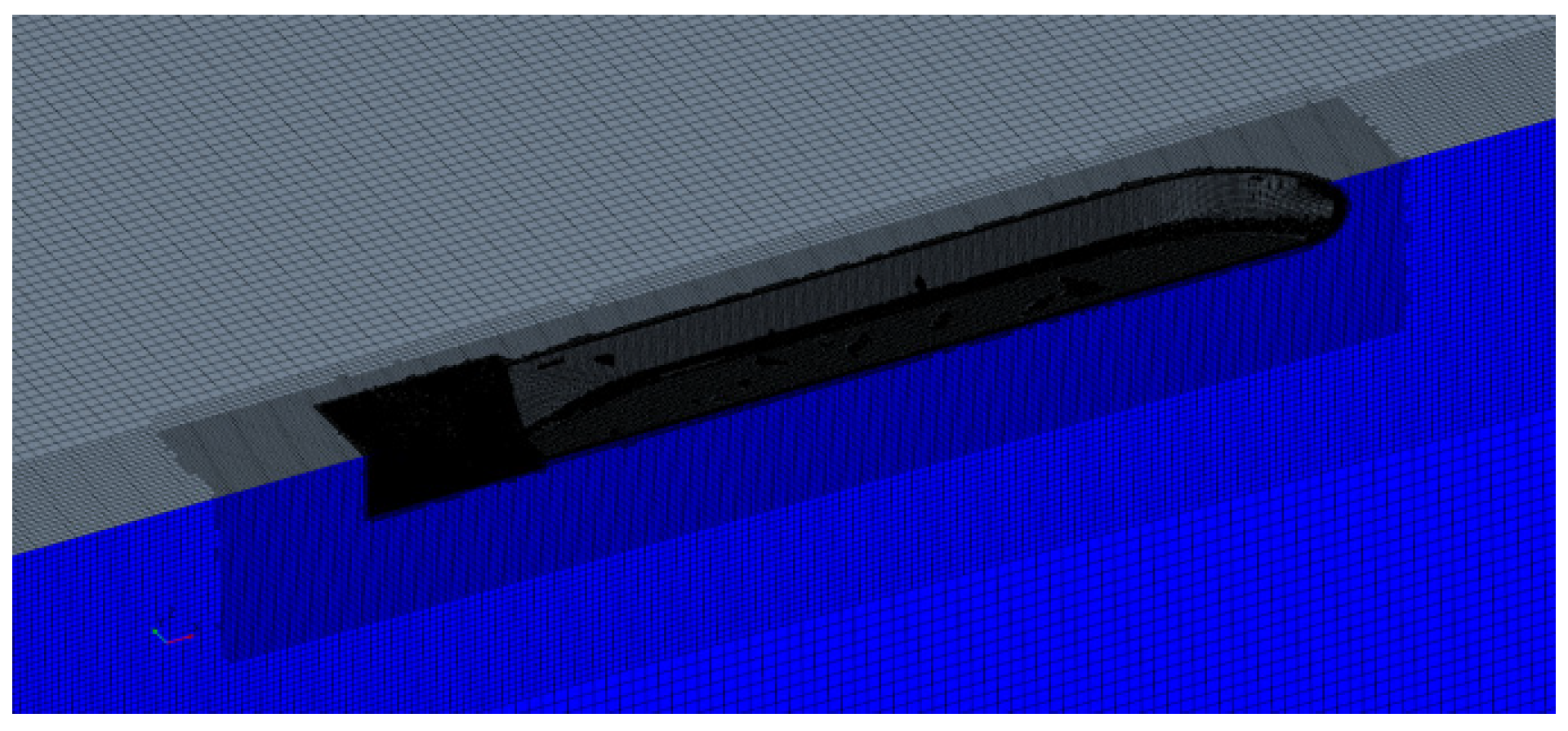
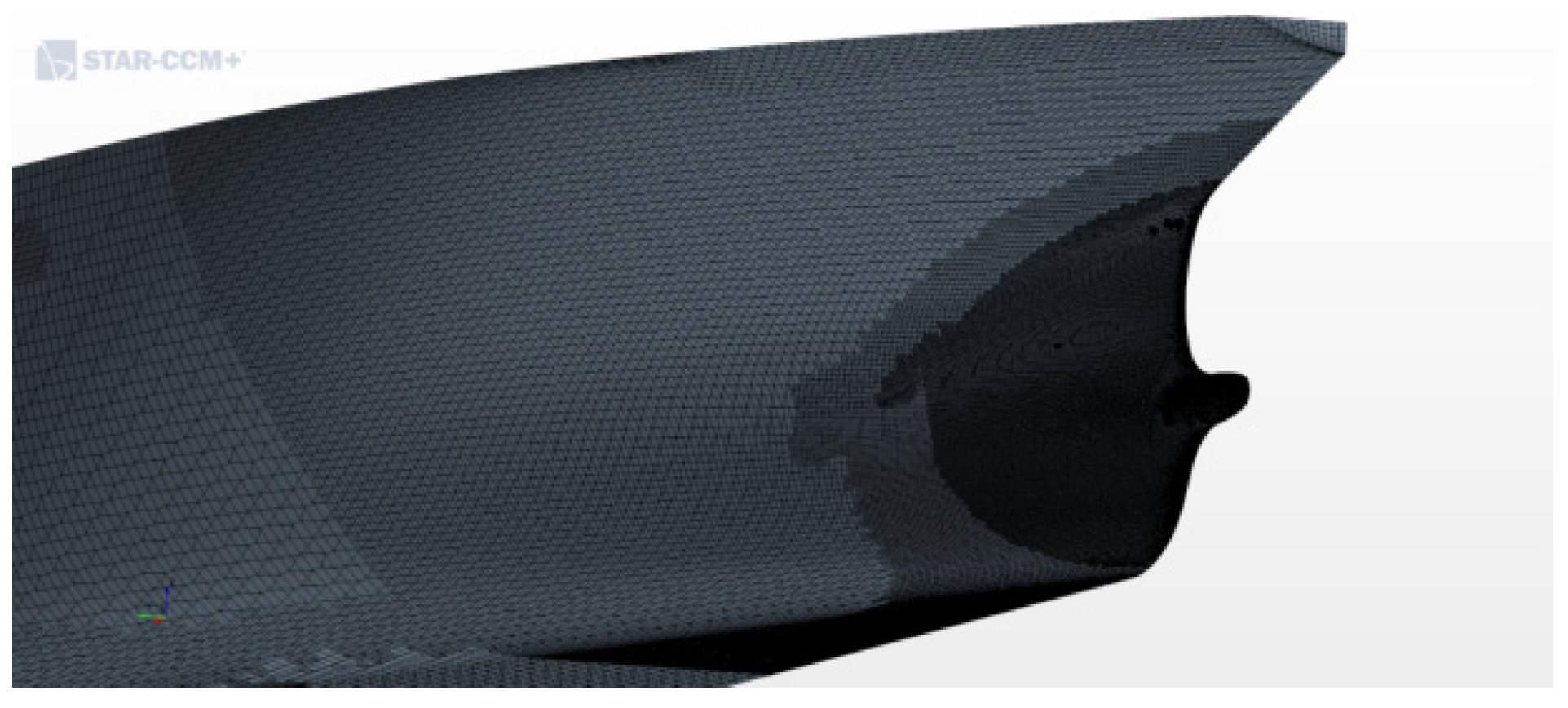
The computational domain has a length of 5.0
Lpp, a width of 2.5
Lpp, and a depth of 1.5
Lpp (
Figure 2,
Figure 3 and
Figure 4). The upstream and side-boundary surfaces were set as the inlet, the downstream boundary surface was set as the outlet, and the slip condition was applied to ignore the wave effect at the top surface boundary. The computational cells were generated by a hexahedral element. The nondimensional distance (y+) from the hull surface to the first cell center was set to one (or less) for the low Reynolds–number model and to approximately 70 for the wall function turbulence model. The computational conditions are shown in
Table 2.
2.2. Verification and Validation (V&V) Method
The numerical and modeling uncertainties in the CFD simulation were evaluated on the basis of the ITTC procedures [
21]. Verification, which assesses the numerical uncertainty in a simulation, was applied for estimating
(
K is the form factor), which is the standard measure of viscous resistance. Numerical errors generally include errors due to the number of iterations, time steps, and grid sizes. Herein, the time step is not considered because this calculation is a steady calculation, and hydrodynamic forces are calculated until convergence. Thus, only the numerical uncertainty
due to the grid size can be evaluated.
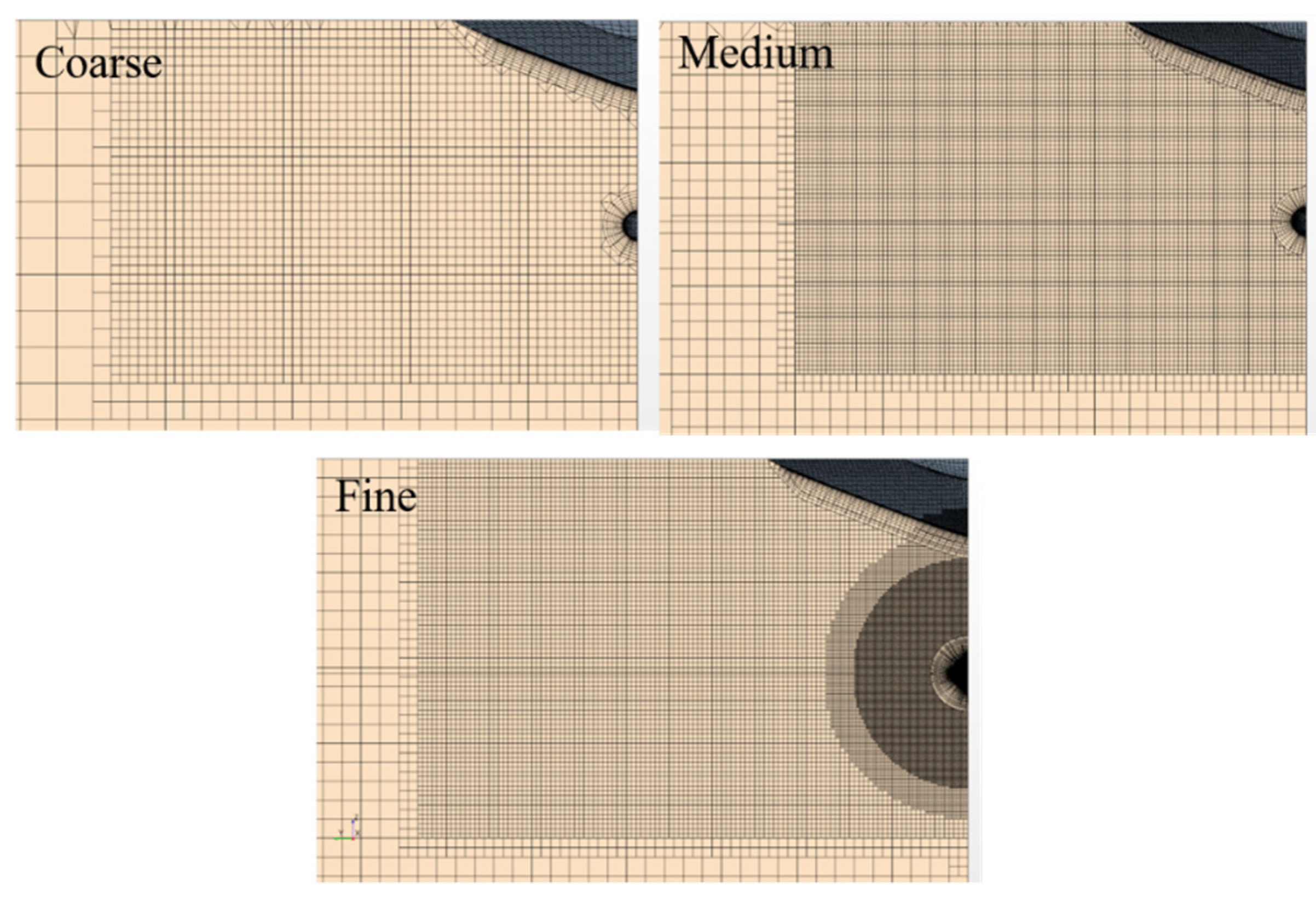
was evaluated by generating three types of grids with different sizes (coarse, medium, and fine). The number of cells in the coarse (NC3), medium (NC2), and fine (NC1) grids are shown in
Table 3. The grid arrangements around the propeller plane for each grid type are shown in
Figure 5. The definitions of the grid refinement ratios are shown in Equations (1) and (2).
The differences between the calculated
in the medium–fine and coarse–medium grid solutions, as well as their ratio
R, are defined as follows:
The convergence patterns for grid refinement can be categorized into the following, depending on R:
- (i)
Monotonic convergence: 0 < R < 1;
- (ii)
Oscillatory convergence: R < 0;
- (iii)
Divergence: R > 1.
In case (i) (monotonic convergence), to estimate the numerical errors caused by the cell size and evaluate the uncertainty of the form factor
K, the generalized Richardson extrapolation (
RE) was applied to the calculated results. The
RE error can be calculated as follows:
where
is the order of accuracy.
The numerical error in the fine grid calculation is defined as follows:
The numerical uncertainty
evaluation is based on the correction factor
, which is calculated as follows:
Herein, a second-order upwind scheme was used; thus,
in Equation (9). Therefore, the numerical uncertainty
can be calculated as follows:
In case (ii) (oscillatory convergence),
can be calculated as follows:
where
is the maximum
in the grid convergence calculation and
is the minimum
in the grid convergence calculation.
In case (iii) (divergence), cannot be estimated.
Validation is defined as the process of assessing the modeling uncertainty using the benchmark experimental data. However, cannot be calculated directly. However, the comparison error and the validation uncertainty can be calculated. Therefore, and are compared to evaluate .
The error
is given by the difference in the validation data
and
values as follows:
where
is the error in the validation experimental data, and
is the simulation modeling error. The validation uncertainty
can be calculated as follows:
If , the combination of all the errors in and is smaller than , and validation is achieved at the level. If (the sign and magnitude of ), the modeling needs to be improved.
2.3. Results of the Verification and Validation
The verification results for
,
,
,
,
,
,
, and
are shown in
Table 4.
The calculated numerical uncertainty (0.13%) of the k–omega SST model is lower than that obtained using the other turbulence models. Therefore, in the calculation of viscous resistance, the k–omega SST model without a wall function showed less grid dependency compared with the other turbulence models. The k–omega SST model with a wall function (wWF) is an oscillatory convergence ( < 0). Thus, the uncertainty of the k–omega SST wWF model was calculated using method (ii) (oscillatory convergence) mentioned above. The RSM showed higher numerical uncertainty (approximately 0.25%) than the k–omega SST model; however, its uncertainty is generally lower than that obtained from the experiments. Nevertheless, the RSM results showed sufficiently low numerical uncertainty. The QPS model results in an oscillatory convergence ( < 0). Thus, the uncertainty of the QPS model was calculated using method (ii) mentioned above.
The validation results are shown in
Table 5.
is the comparison error defined in Equation (12) and
is the validation uncertainty defined in Equation (13).
The validation results show that of the k–omega SST model is 4.72%, which is much larger than (1.01%). Therefore, the turbulence model needs to be improved. Meanwhile, the LPS model produces an overestimation of 1.29%. In particular, the LPST model produces an underestimation of 0.13%, which can be calculated with high accuracy. Moreover, the of the LPST model is much less than (1.03%). Therefore, the LPST model was close to the experimental results. The EB model produces an overestimation of 6.41%, which confirms that it is unsuitable for ship CFD calculations.
2.4. Validation of the Wake Distribution
The calculated wake distributions were compared with those obtained from stereoscopic particle image velocimetry (SPIV) measurements at 110 mm from the aft part. Here, we used the results obtained from SPIV measurements performed by NMRI [
5].
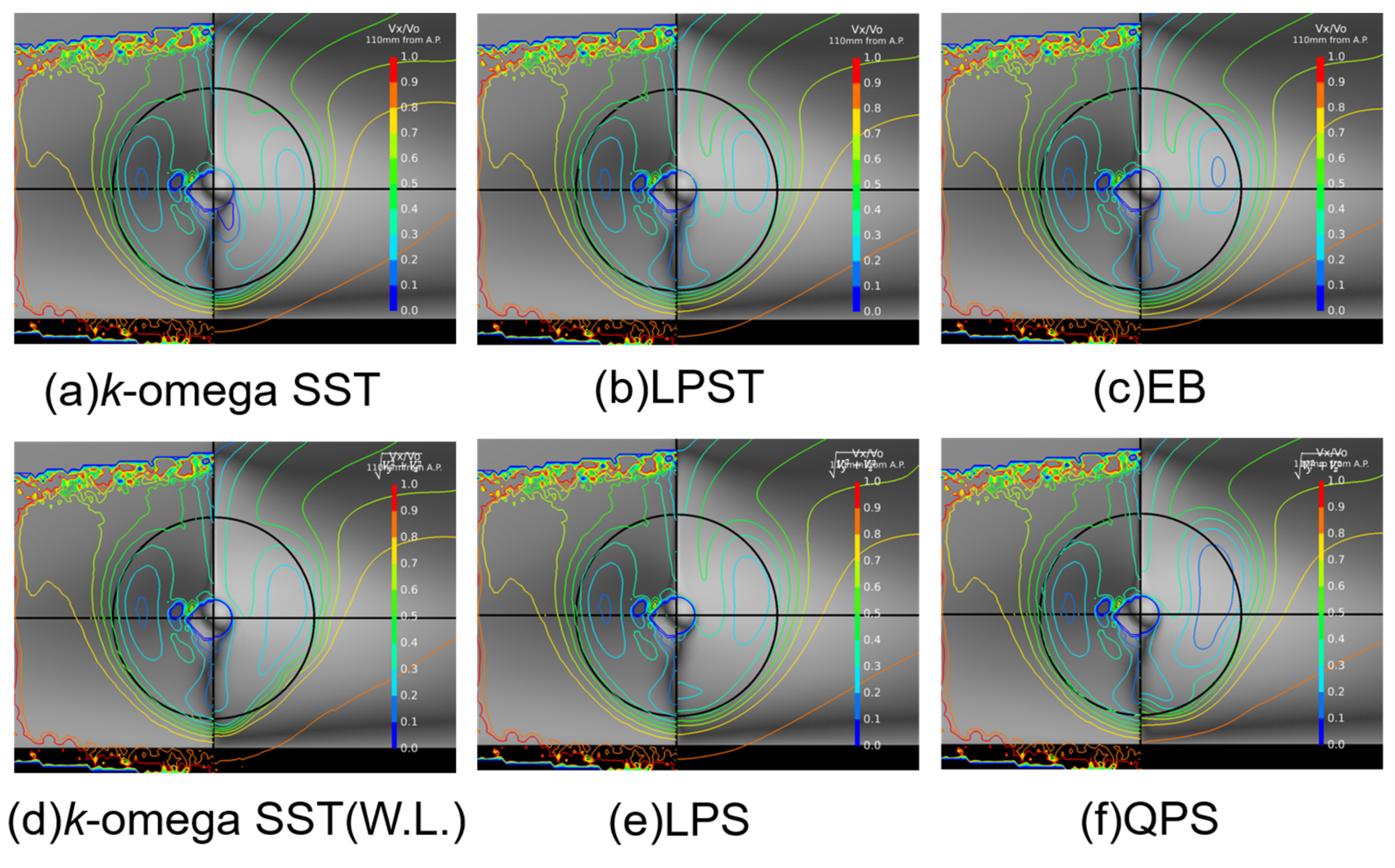
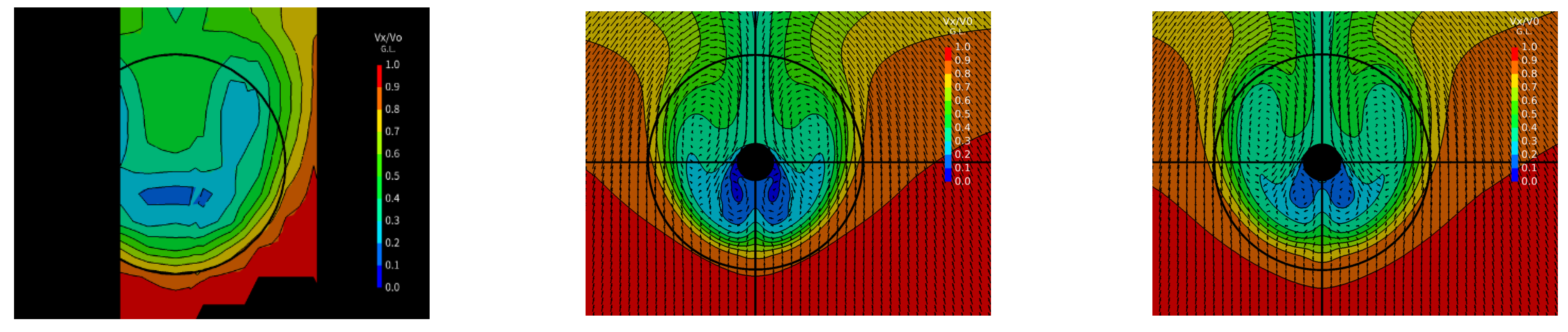
SPIV measurement results of the nondimensional longitudinal velocity at 110 mm from AP to bow side are shown in
Figure 6, and the corresponding CFD calculation results are shown in
Figure 7 (where
is the longitudinal velocity (m/s) and
is the ship speed (m/s)).
According to
Figure 7, the calculated results obtained using the
k–omega SST model are in good agreement with the SPIV measurement results. However, the contour at
= 0.2 obtained using the
k–omega SST model is different from the contour obtained from SPIV measurements. Furthermore, the contour obtained using the
k–omega SST model has a small area at
= 0.4 compared to the corresponding contour obtained from SPIV measurements. The shapes of contours at
= 0.2 obtained using the LPS and LPST models are very close to those obtained from SPIV measurements. However, the longitudinal velocities at the propeller’s top position obtained using the LPS and LPST models are a little lower than those obtained from SPIV measurements. A contour at
= 0.1 was obtained using the QPS and the EB models but no contour was obtained at
= 0.1 from SPIV measurements. The calculated
at the propeller plane obtained using the QPS model is smaller than that obtained from SPIV measurements, although not much smaller than that obtained using the LPS and LPST models. The overall shape of the wake obtained using the EB model is similar to that obtained from SPIV measurements.
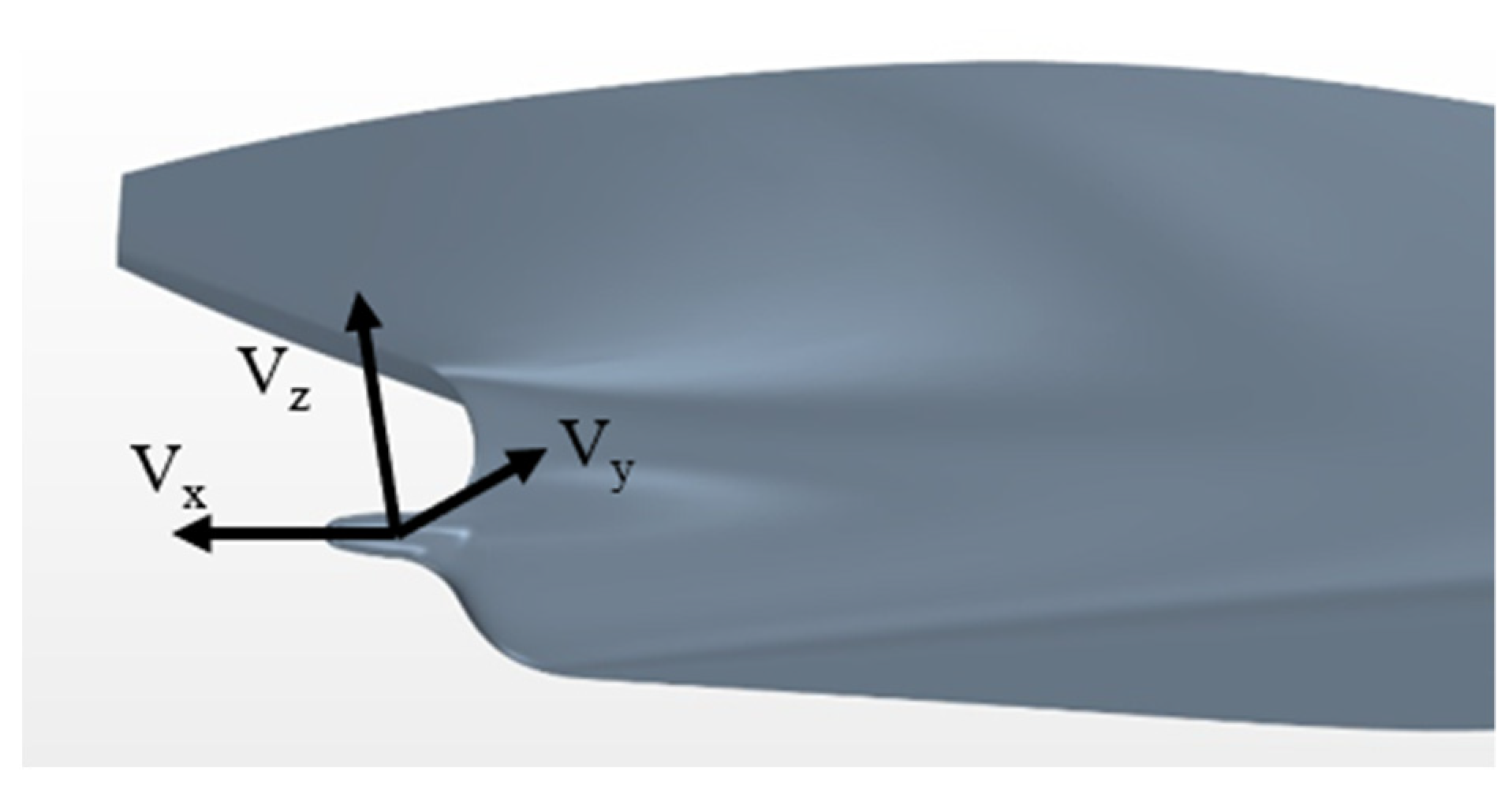
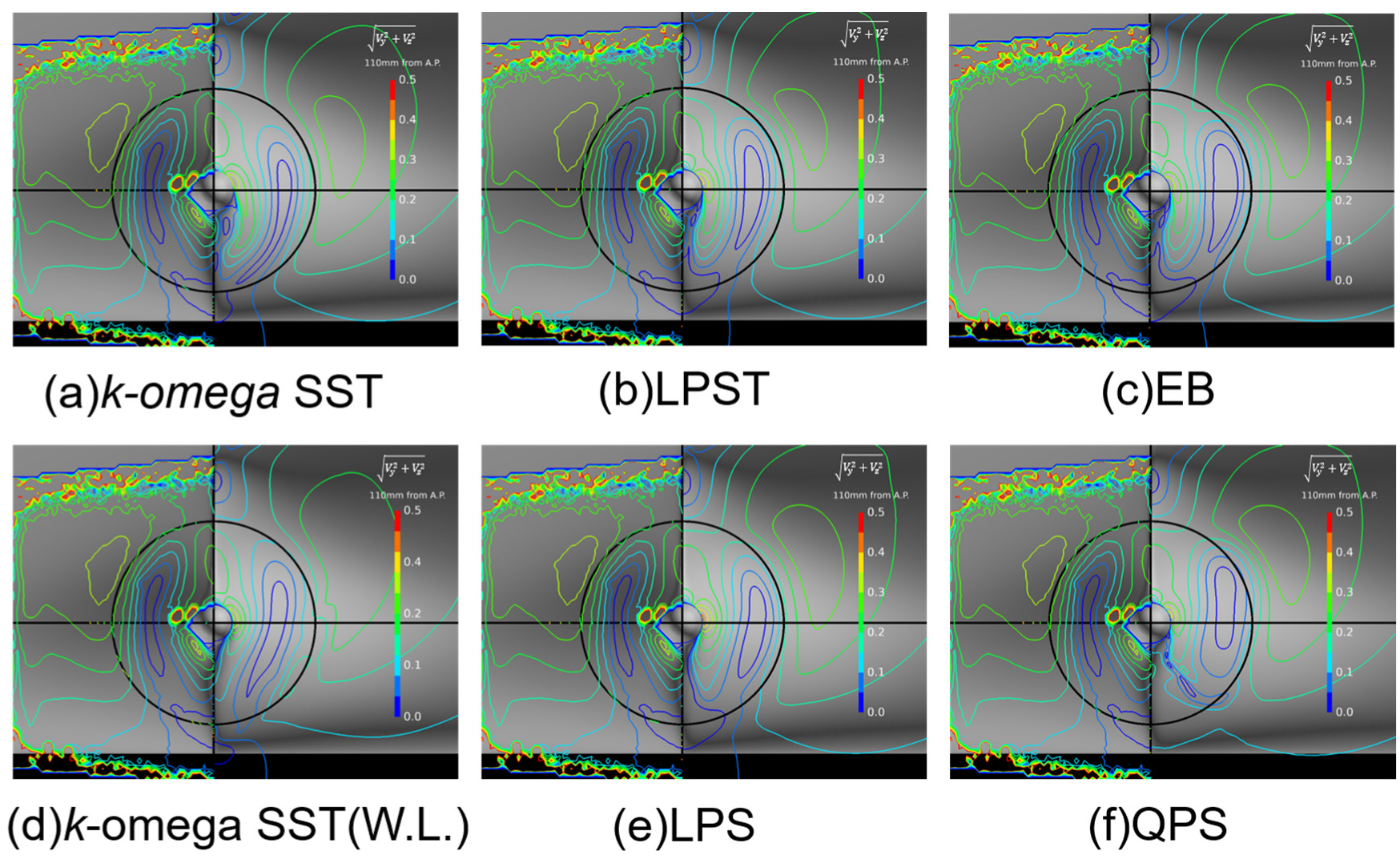
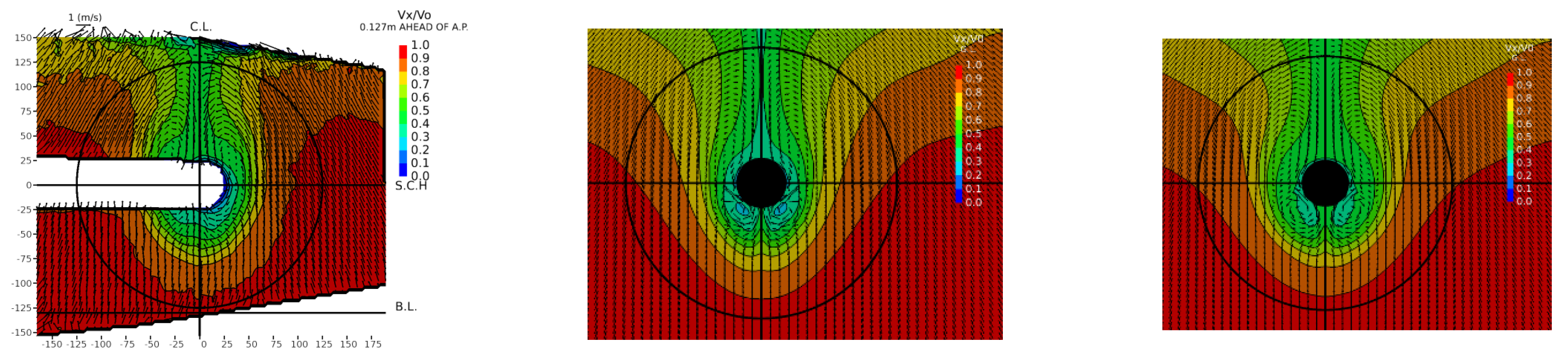
Figure 8 shows the magnitude distribution of the crossflow velocity obtained from CFD calculations at 110 mm from the AP to bow side and that obtained from SPIV measurements. The magnitude distribution of the crossflow velocity is useful for determining the longitudinal vortex intensity and core location. The crossflow velocity magnitude is defined as follows:
The contour at 0.05 obtained using the k–omega SST model is located lower than that obtained from SPIV measurements. Meanwhile, the calculated using the LPS and LPST models is in good agreement with SPIV measurements. Using the LPS and LPST models, the longitudinal vortex intensity and core location can be calculated more accurately than those using the other turbulence models, such as the k–omega SST model. The 0.05 area calculated using the QPS and EB models is larger than that of the contour area calculated using the k–omega SST model. In relation to this, the QPS and EB models overestimated the wake and .
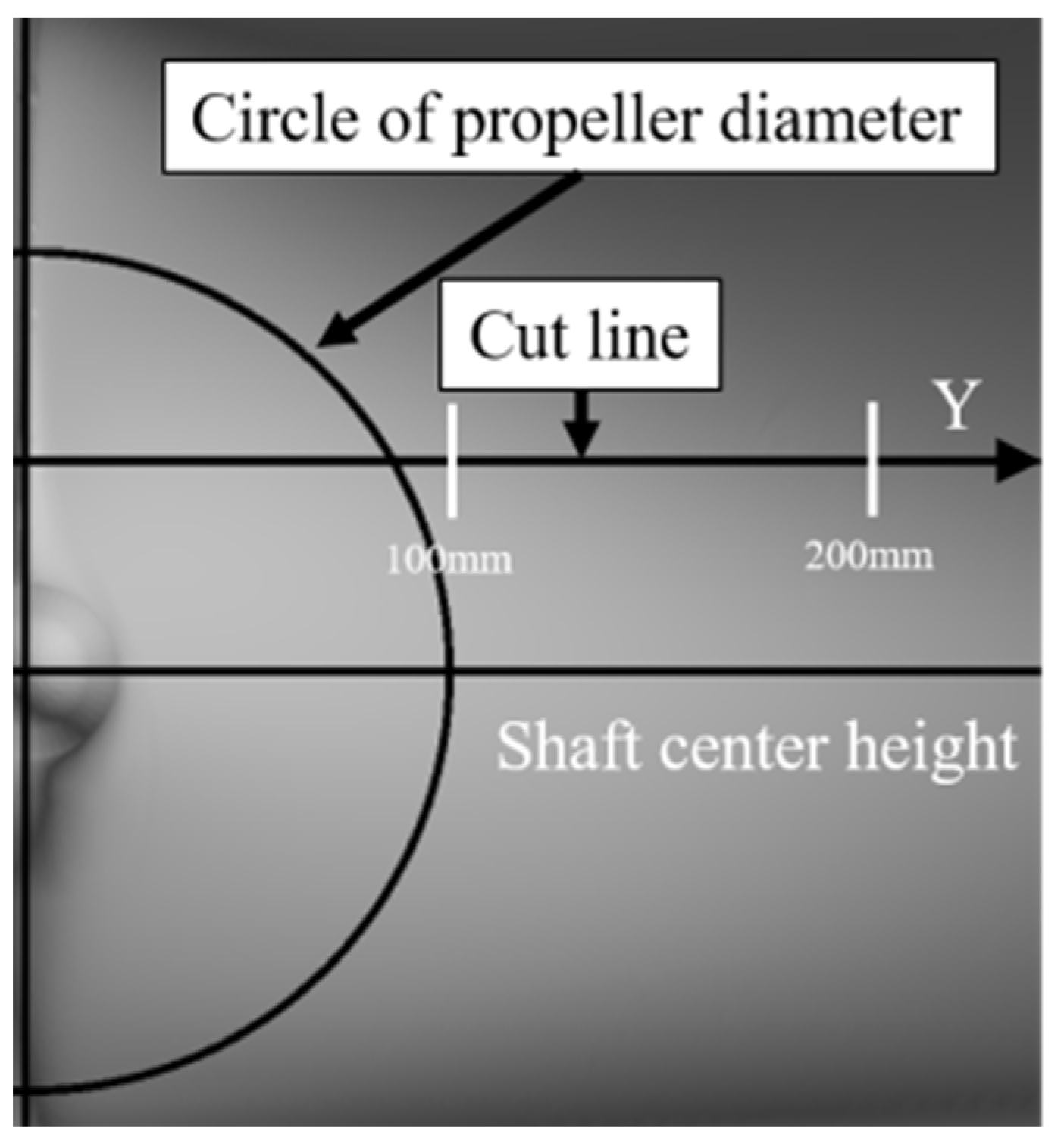
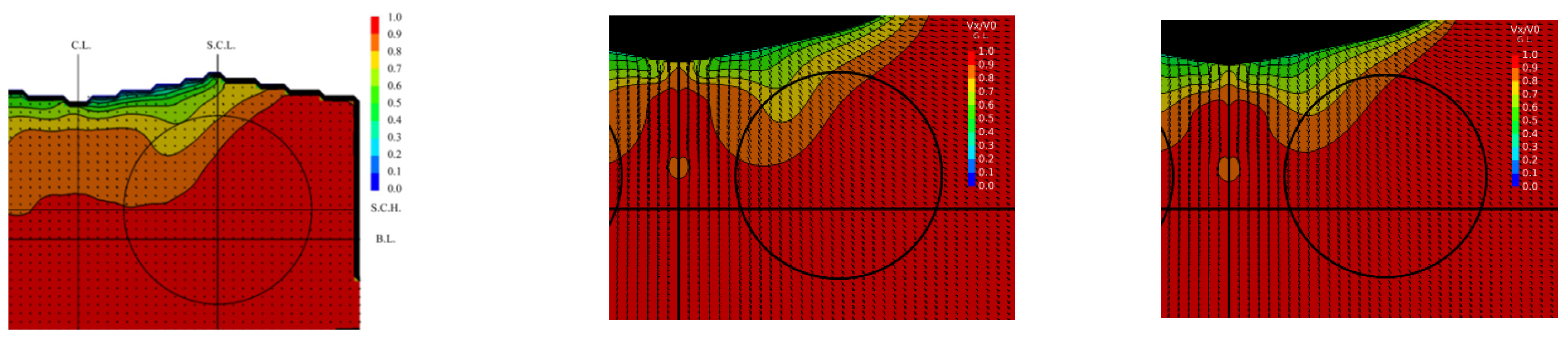
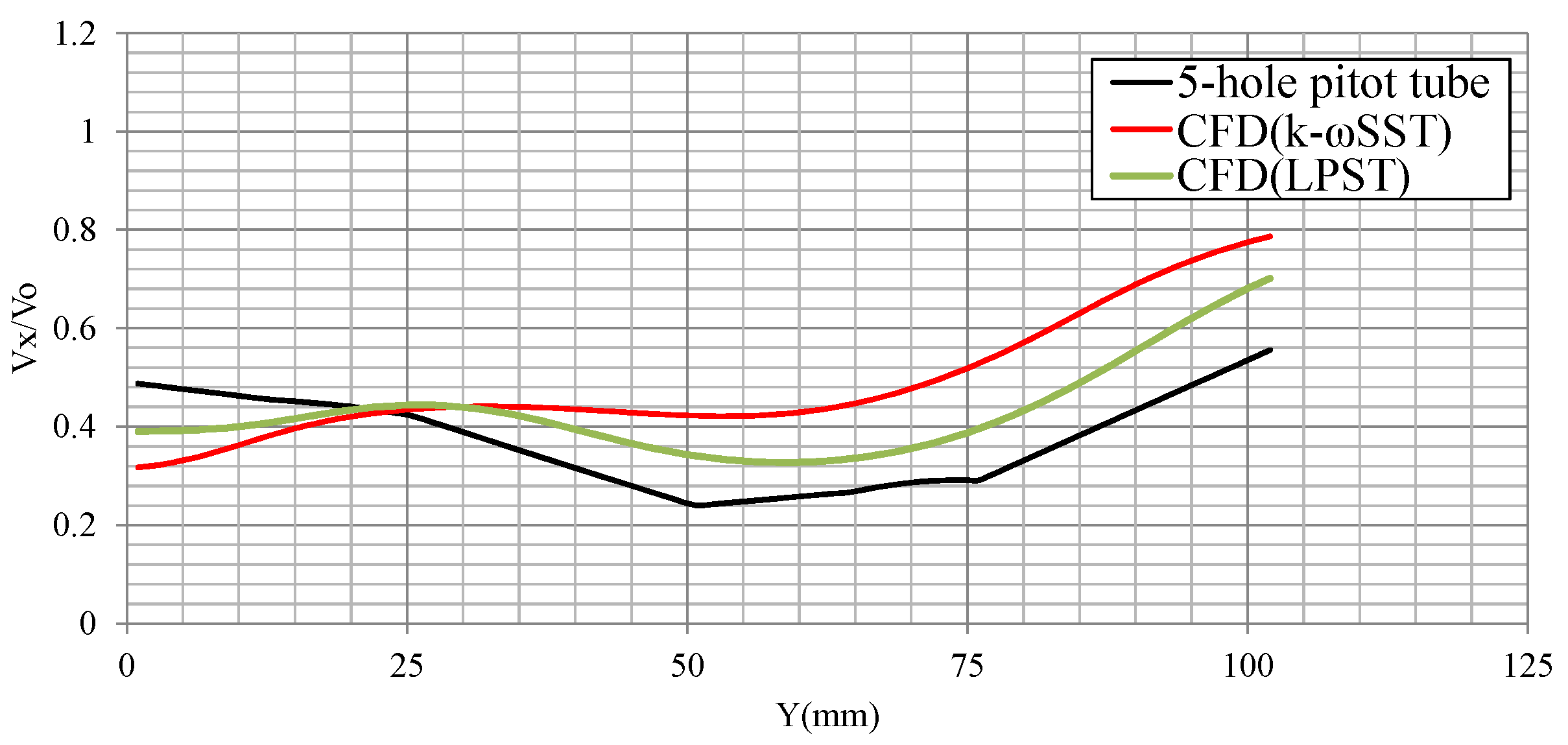
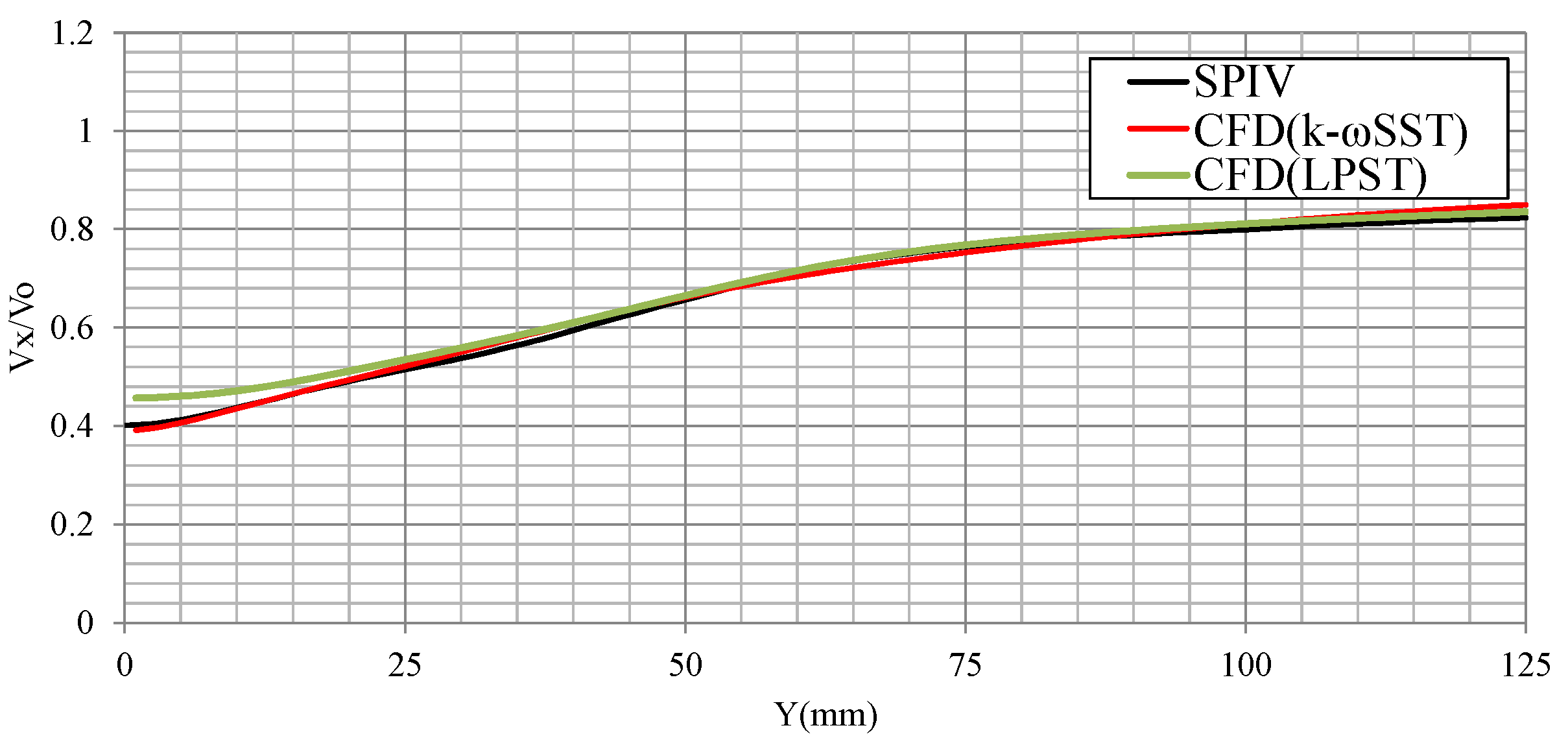
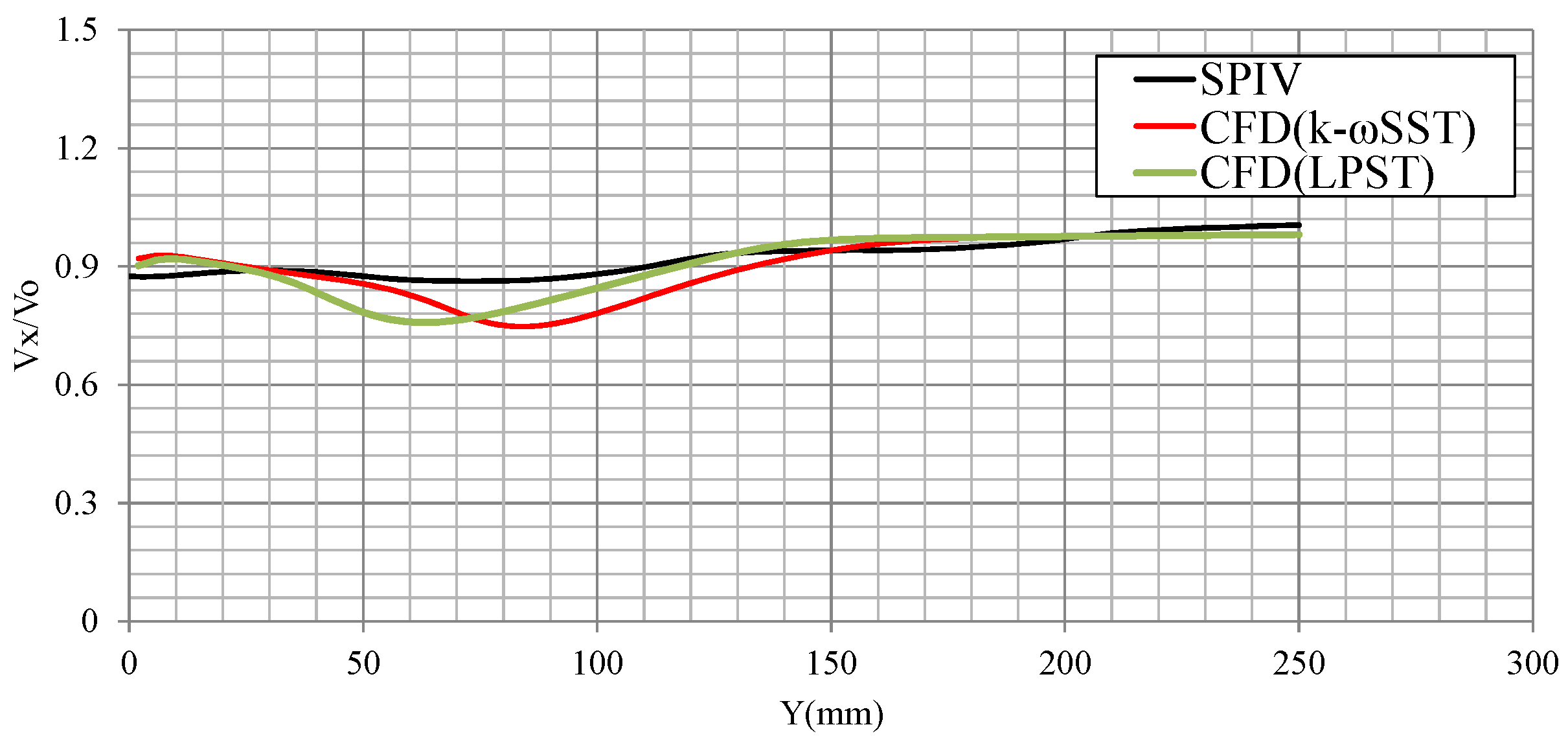
Figure 9 shows the definition and a schematic view of Y (mm).
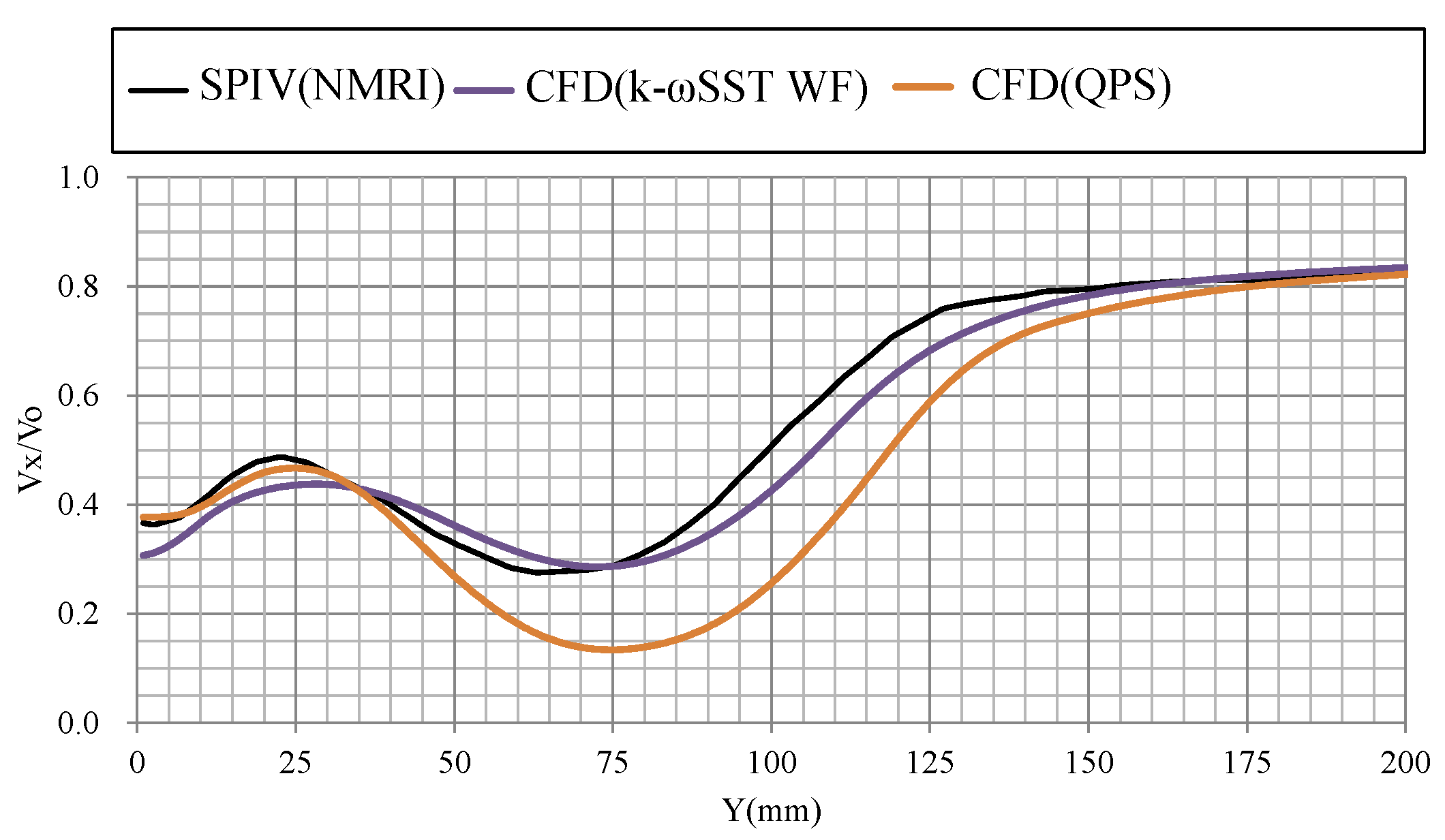
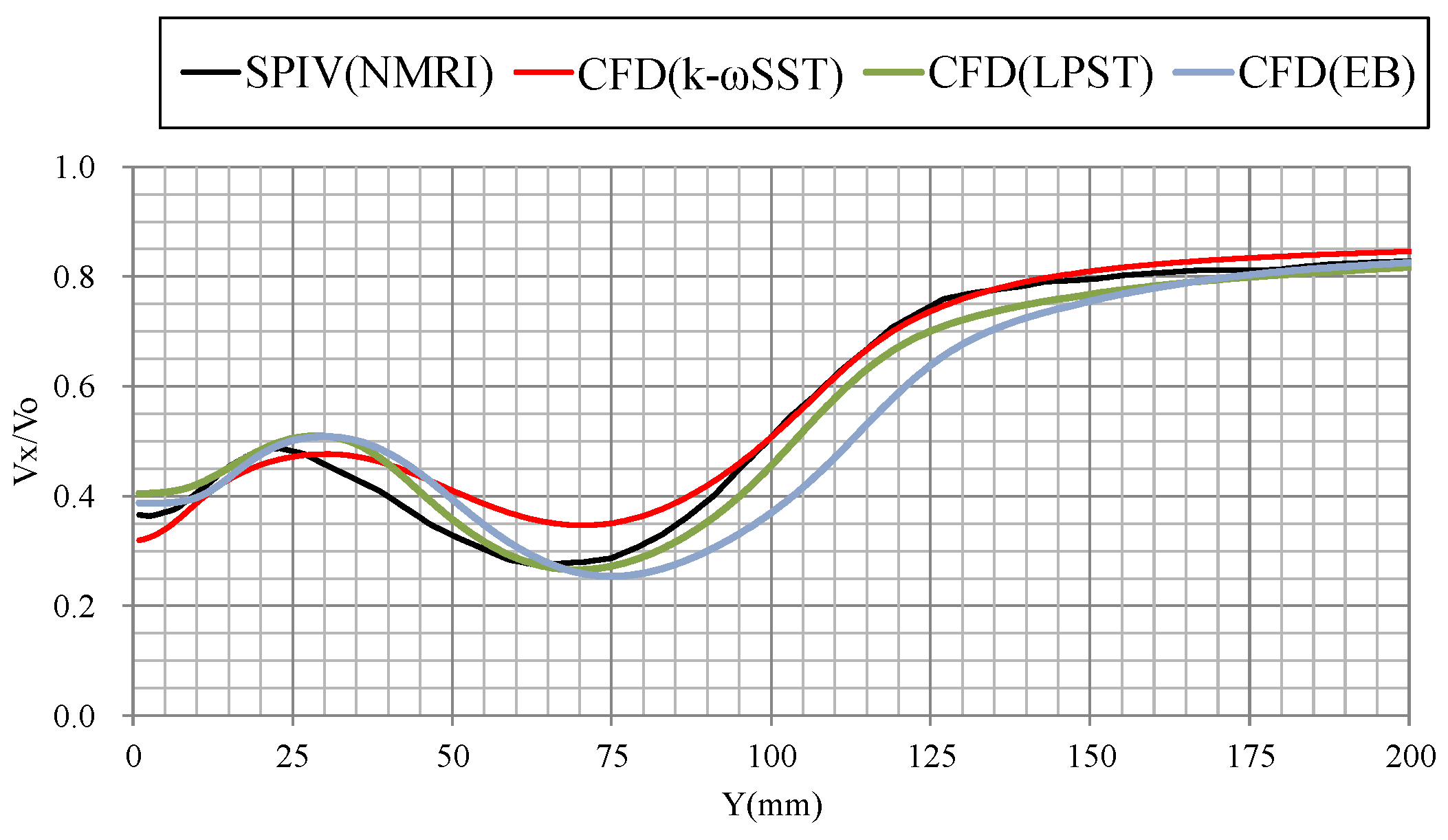
Figure 10 and
Figure 11 show a comparison of the longitudinal velocity distribution along the horizontal line above the propeller shaft.
The
k–omega SST wWF model (
Figure 10) also showed good agreement around Y = 75 mm. However, the
k–omega SST wWF model showed a large difference between 100 mm and 150 mm. Although the EB model (
Figure 11) was capable of estimating the stern longitudinal vortex strength with high accuracy, it is considered that the hydrodynamic force was overestimated because the wake is generally large. As shown in
Figure 11, the LPST model can estimate a wake around Y = 75 mm with high accuracy. If the vortex core can be accurately estimated, it will be possible to design a wake-adapted propeller with high accuracy.
The V&V analysis of
presented in
Section 2.3 indicates that the
k–omega SST model showed lower numerical uncertainty and higher model uncertainty compared to the RSM. The
k–omega SST model is considered an isotropic eddy viscosity model. Therefore, the appropriate turbulence model needs to be shifted from the
k–omega SST model to the RSM.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}