
First-Order Ocean Surface Cross Section for Shipborne Bistatic HFSWR: Derivation and Simulation

 ,
,  ,
,  , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
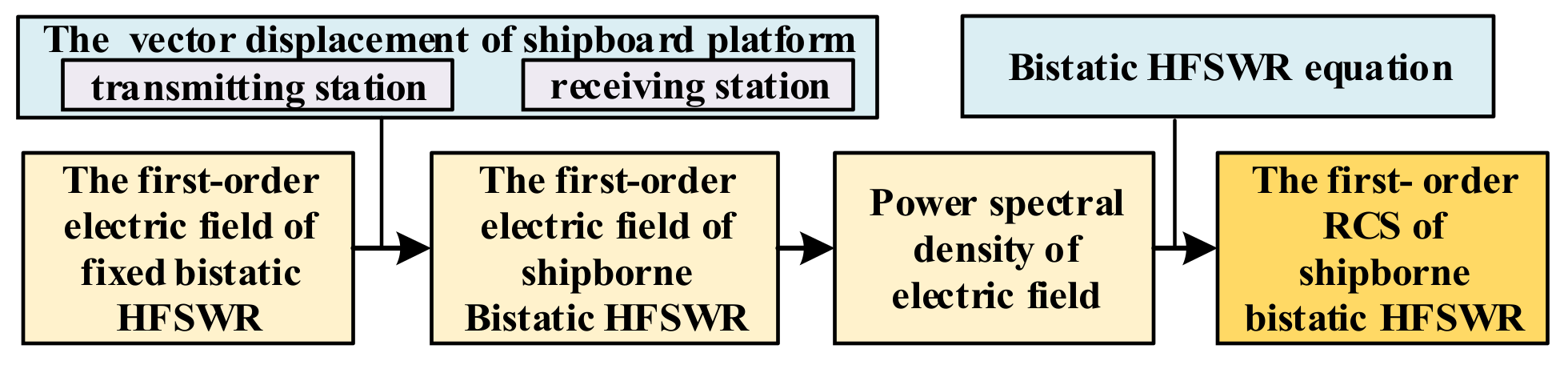
2.1. Derivation of a First-Order RCS of Shipborne Bistatic HFSWR
2.2. First-Order RCS with Different Motion Types
2.2.1. First-Order RCS with Uniform Linear Motion
2.2.2. First-Order RCS with Periodic Oscillation Motion
2.2.3. First-Order RCS with Hybrid Motion
3. Simulation Results and Discussion
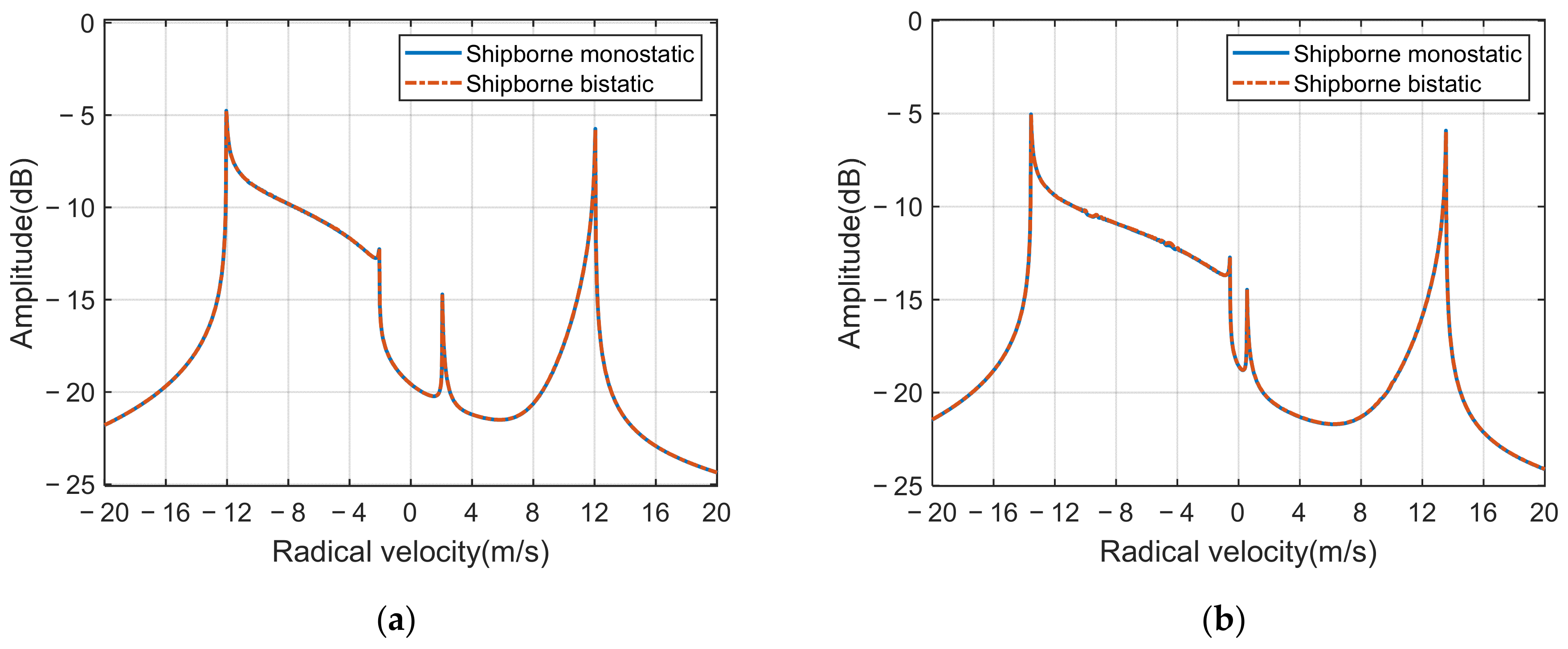
3.1. Both Platforms Move in Uniform Linear Motion
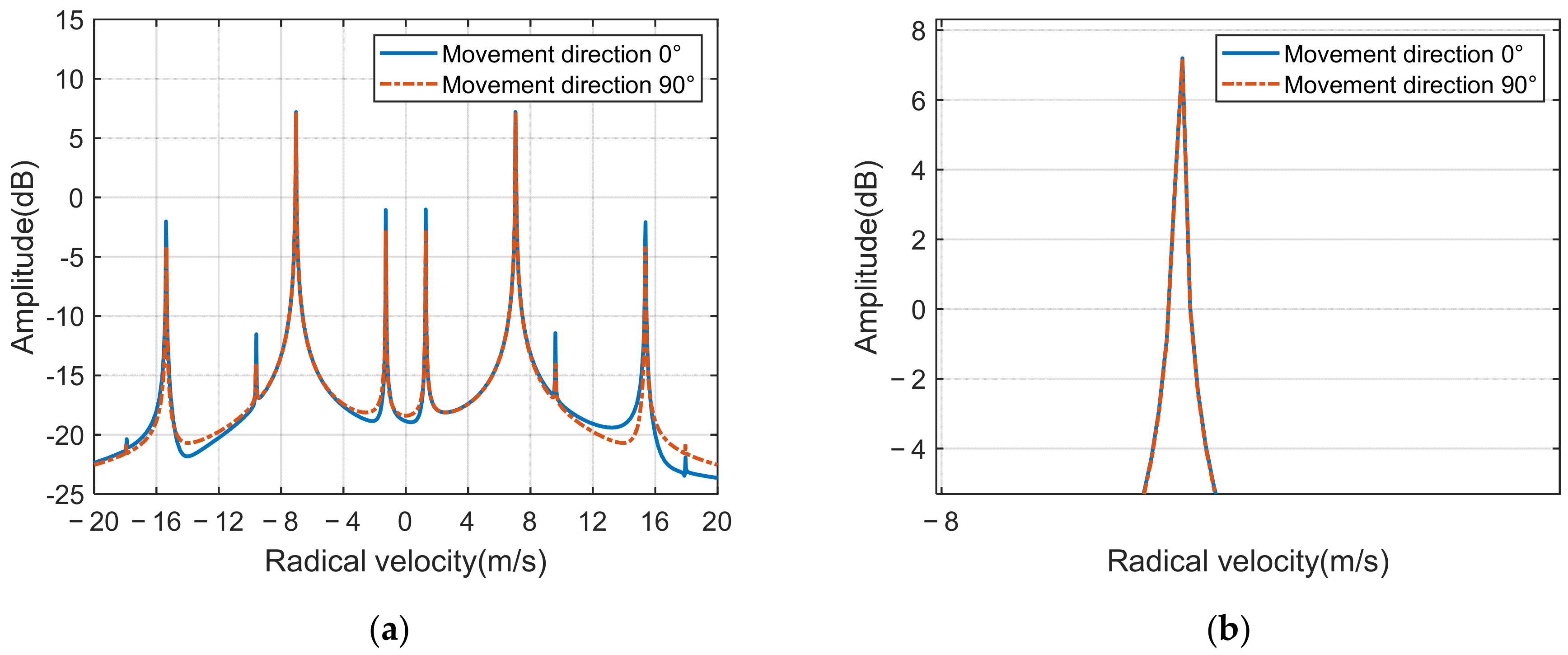
3.2. Both Platforms Move in Periodic Oscillation Motion
3.3. Both Platforms Undertake Periodic Motion and Uniform Linear Motion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Barrick, D.E. Remote sensing of sea state by radar. In Proceedings of the Ocean 72nd IEEE International Conference on Engineering in the Ocean Environment, Newport, RI, USA, 13–15 September 1972; pp. 186–192. [Google Scholar]
- Lipa, B.J.; Barrick, D.E. Extraction of sea state from HF radar sea echo: Mathematical theory and modeling. Radio Sci. 1986, 21, 81–100. [Google Scholar] [CrossRef]
- Grosdidier, S.; Baussard, A.; Khenchaf, A. HFSW Radar Model: Simulation and Measurement. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3539–3549. [Google Scholar] [CrossRef]
- Xie, J.; Yao, G.; Sun, M.; Ji, Z. Measuring Ocean Surface Wind Field Using Shipborne High-Frequency Surface Wave Radar. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3383–3397. [Google Scholar] [CrossRef]
- Yao, G.; Xie, J.; Huang, W.; Ji, Z.; Zhou, W. Theoretical analysis of the first-order sea clutter in shipborne high-frequency surface wave radar. In Proceedings of the 2018 IEEE Radar Conference, Oklahoma City, OK, USA, 23–27 April 2018; pp. 1255–1259. [Google Scholar]
- Sun, M.; Xie, J.; Ji, Z.; Cai, W. Remote sensing of ocean surface wind direction with shipborne high frequency surface wave radar. In Proceedings of the 2015 IEEE Radar Conference, Johannesburg, South Africa, 27–30 October 2015; pp. 39–44. [Google Scholar]
- Liu, C.; Chen, B.; Chen, D.; Zhang, S. Analysis of First-order Sea Clutter in a Shipborne Bistatic High Frequency Surface Wave Radar. In Proceedings of the 2006 CIE International Conference on Radar, Shanghai, China, 16–19 October 2006; pp. 1–4. [Google Scholar]
- Barrick, D.E. First-order theory and analysis of MF/HF/VHF scatter from the sea. IEEE Trans. Antennas Propag. 1972, 20, 2–10. [Google Scholar] [CrossRef] [Green Version]
- Gill, E.W.; Walsh, J. High-frequency bistatic cross sections of the ocean surface. Radio Sci. 2001, 36, 1459–1475. [Google Scholar] [CrossRef]
- Gill, E.W.; Huang, W.; Walsh, J. The Effect of the Bistatic Scattering Angle on the High-Frequency Radar Cross Sections of the Ocean Surface. IEEE Geosci. Remote Sens. Lett. 2008, 5, 143–146. [Google Scholar] [CrossRef]
- Walsh, J.; Huang, W.; Gill, E.W. The First-Order High Frequency Radar Ocean Surface Cross Section for an Antenna on a Floating Platform. IEEE Trans. Antennas Propag. 2010, 58, 2994–3003. [Google Scholar] [CrossRef]
- Xie, J.; Sun, M.; Ji, Z. First-order Ocean surface cross-section for shipborne HFSWR. Electron. Lett. 2013, 49, 1025–1026. [Google Scholar] [CrossRef]
- Yao, G.; Xie, J.; Ji, Z.; Sun, M. The first-order ocean surface cross section for shipborne HFSWR with rotation motion. In Proceedings of the 2017 IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017; pp. 0447–0450. [Google Scholar]
- Ma, Y.; Gill, E.W.; Huang, W. First-order high frequency radar ocean surface cross section incorporating a dual-frequency platform motion model. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar]
- Sun, M.; Xie, J.; Ji, Z.; Yao, G. Ocean surface cross sections for shipborne HFSWR with sway motion. Radio Sci. 2016, 51, 1745–1757. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Gill, E.W.; Huang, W. Bistatic High-Frequency Radar Ocean Surface Cross Section Incorporating a Dual-Frequency Platform Motion Model. IEEE J. Ocean. Eng. 2018, 43, 205–210. [Google Scholar] [CrossRef]
- Ma, Y.; Huang, W.; Gill, E.W. High-Frequency Radar Ocean Surface Cross Section Incorporating a Dual-Frequency Platform Motion Model. IEEE J. Ocean. Eng. 2018, 43, 195–204. [Google Scholar] [CrossRef]
- Yao, G.; Xie, J.; Huang, W. Ocean Surface Cross Section for Bistatic HF Radar Incorporating a Six DOF Oscillation Motion Model. Remote Sens. 2019, 10, 2738. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Wei, Y.; Tong, P. First order sea clutter cross section for bistatic shipborne HFSWR. J. Syst. Eng. Electron. 2017, 28, 681–689. [Google Scholar]
- Ji, Y.; Zhang, J.; Wang, Y. Coast–Ship Bistatic HF Surface Wave Radar: Simulation Analysis and Experimental Verification. Remote Sens. 2020, 12, 470. [Google Scholar] [CrossRef] [Green Version]
- Ji, Z.; Jiang, X.; Xie, J.; Wang, Y.; Ding, J. Influence of bistatic shipborne HFSWOTHR platform oscillation on the sea clutter. In Proceedings of the International Conference on Signal Processing, Gold Coast, Australia, 15–17 December 2014; pp. 2007–2012. [Google Scholar]
- Liu, J.; Ji, Y.; Liu, Y.; Meng, J.; Wang, Y.; Zhang, H. Simulation analysis of first order sea clutter spectrum for shipborne bistatic HFSWR. In Proceedings of the IET International Radar Conference, Chongqing, China, 4–6 November 2020; pp. 1656–1660. [Google Scholar]
- Das, S.N.; Shiraishi, S.; Das, S.K. Mathematical modeling of sway, roll and yaw motions: Order-wise analysis to determine coupled characteristics and numerical simulation for restoring moment’s sensitivity analysis. Acta Mech. 2010, 213, 305–322. [Google Scholar] [CrossRef]
- Pierson, W.J.; Moskowiz, L. A proposed spectral form for fully developed seas based upon the similarity theory of S. A. Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, Y.; Liang, X.; Sun, W.; Huang, W.; Wang, Y.; Wang, X.; Li, Z. First-Order Ocean Surface Cross Section for Shipborne Bistatic HFSWR: Derivation and Simulation. J. Mar. Sci. Eng. 2022, 10, 649. https://doi.org/10.3390/jmse10050649
Ji Y, Liang X, Sun W, Huang W, Wang Y, Wang X, Li Z. First-Order Ocean Surface Cross Section for Shipborne Bistatic HFSWR: Derivation and Simulation. Journal of Marine Science and Engineering. 2022; 10(5):649. https://doi.org/10.3390/jmse10050649
Chicago/Turabian StyleJi, Yonggang, Xu Liang, Weifeng Sun, Weimin Huang, Yiming Wang, Xinling Wang, and Zhihao Li. 2022. "First-Order Ocean Surface Cross Section for Shipborne Bistatic HFSWR: Derivation and Simulation" Journal of Marine Science and Engineering 10, no. 5: 649. https://doi.org/10.3390/jmse10050649