
Black-Box Modelling and Prediction of Deep-Sea Landing Vehicles Based on Optimised Support Vector Regression

Abstract
:1. Introduction
2. Prototype Design and Motion Model
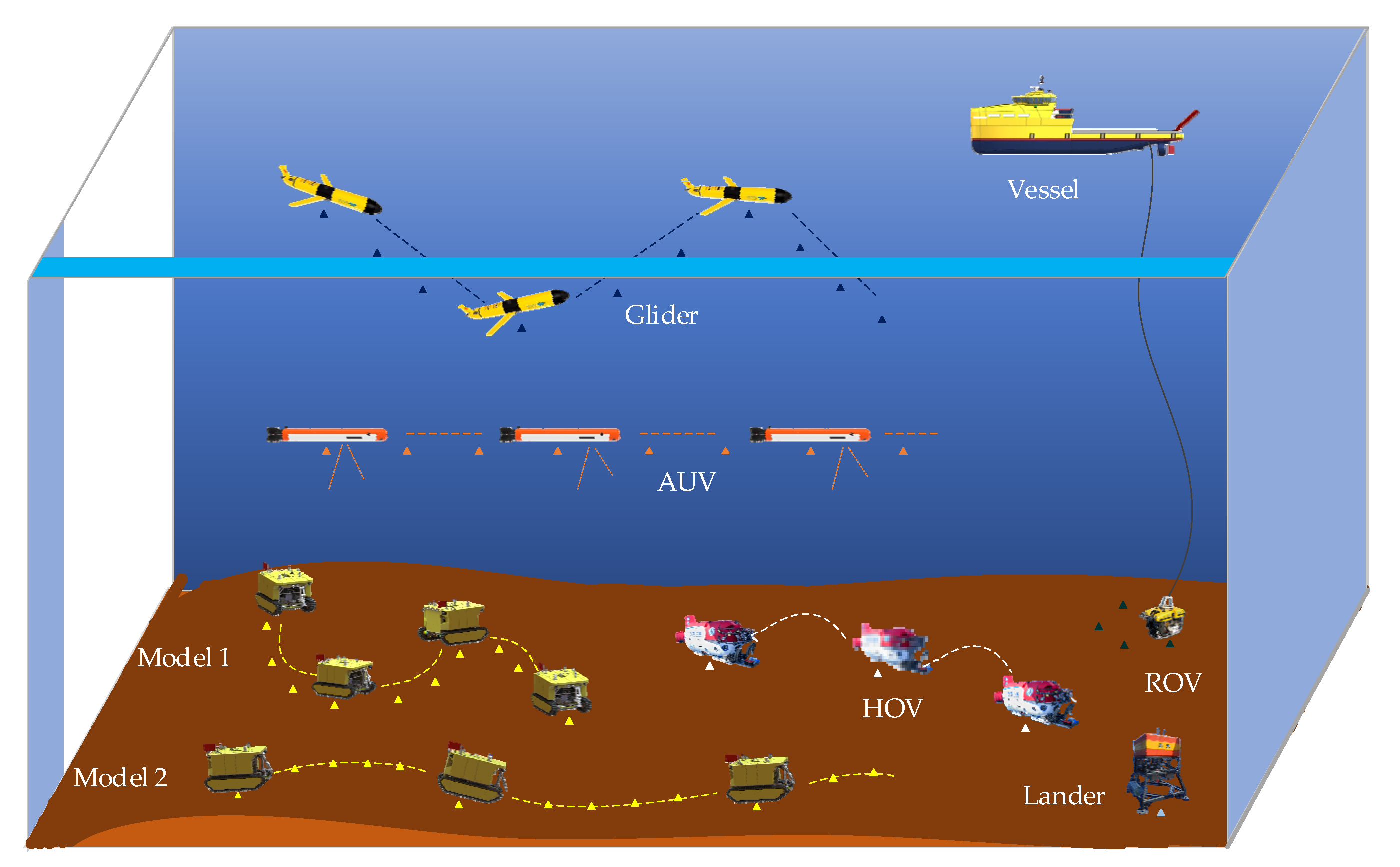
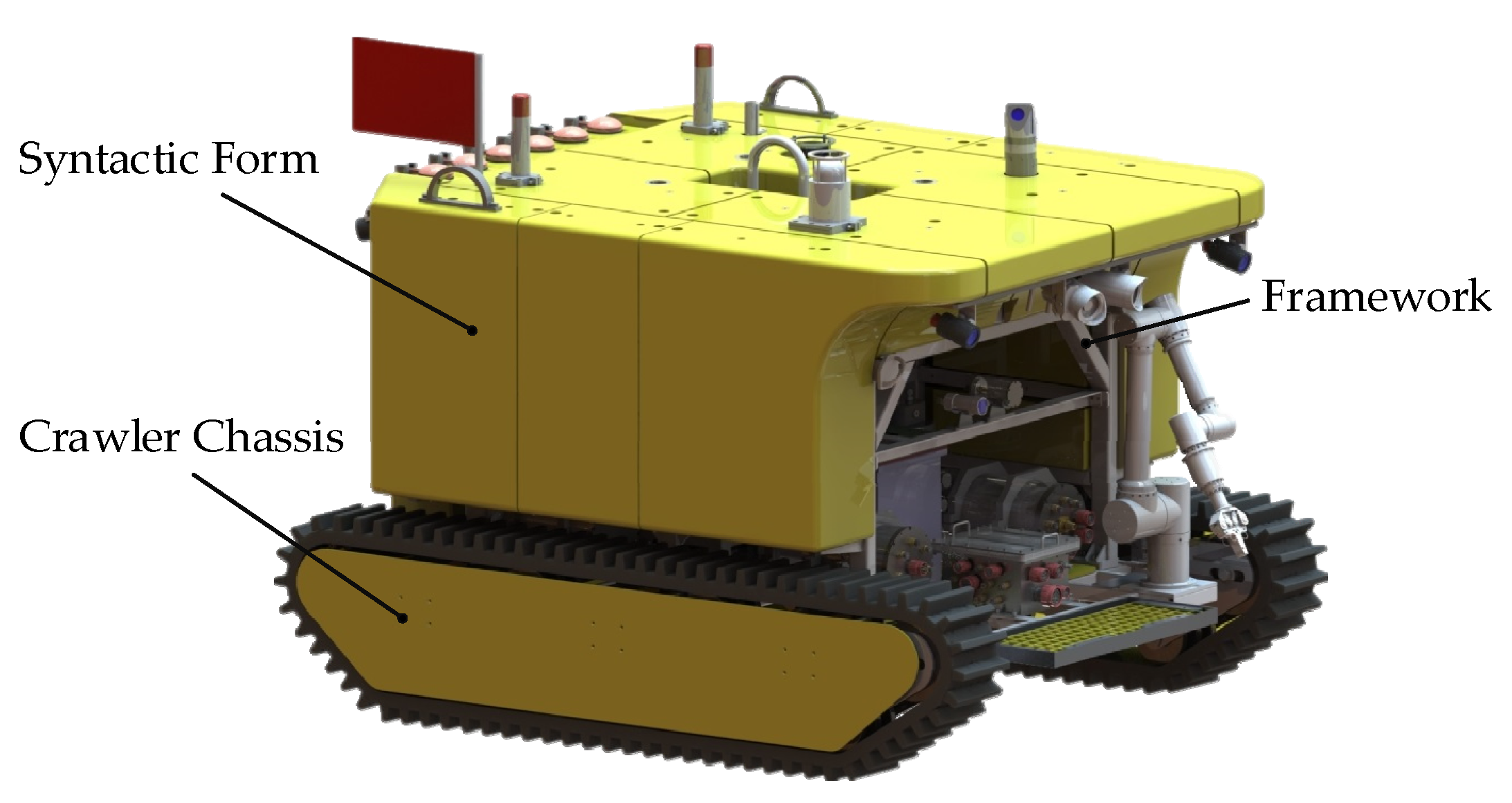
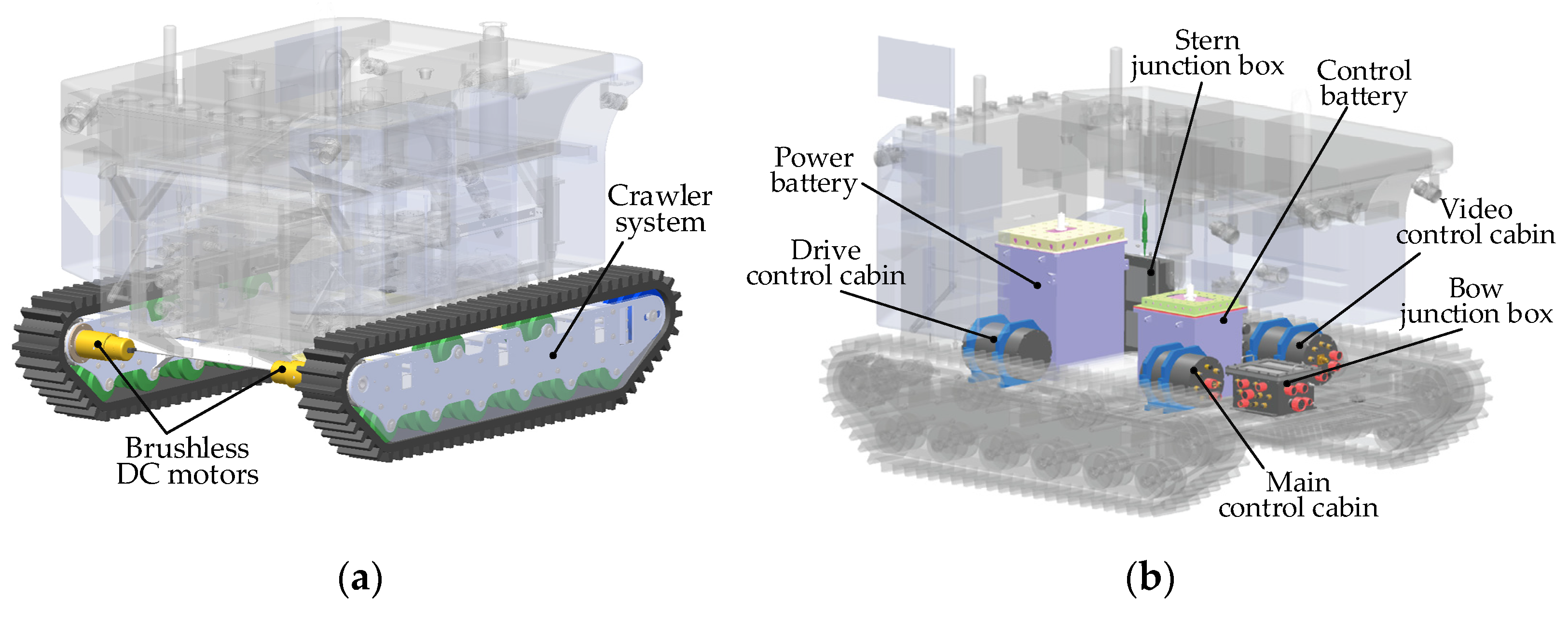
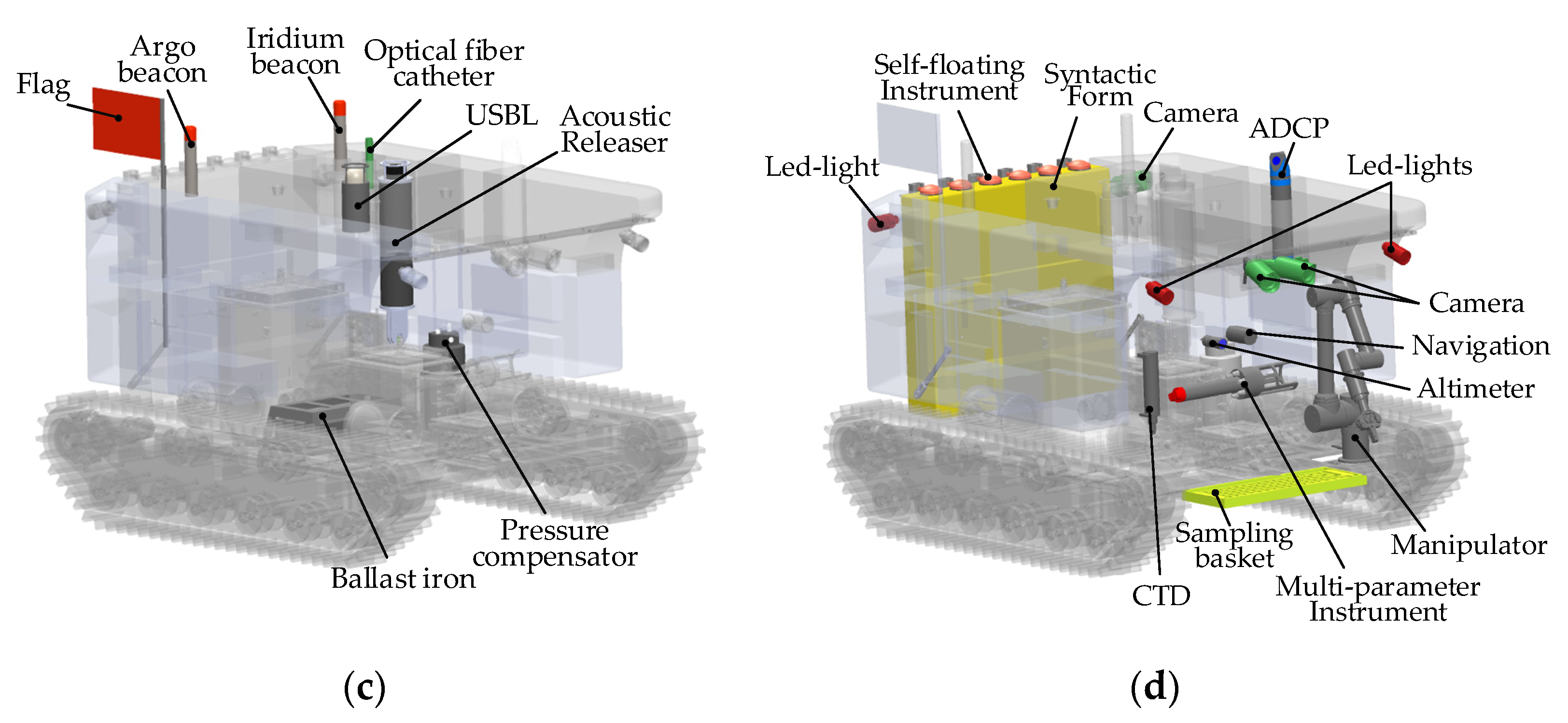
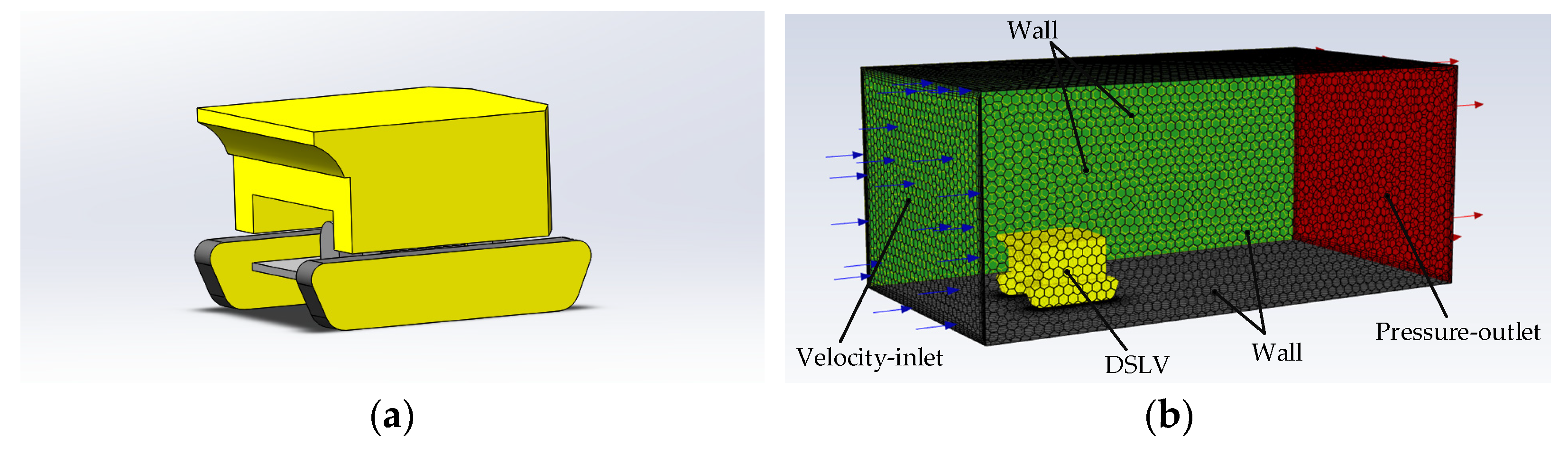
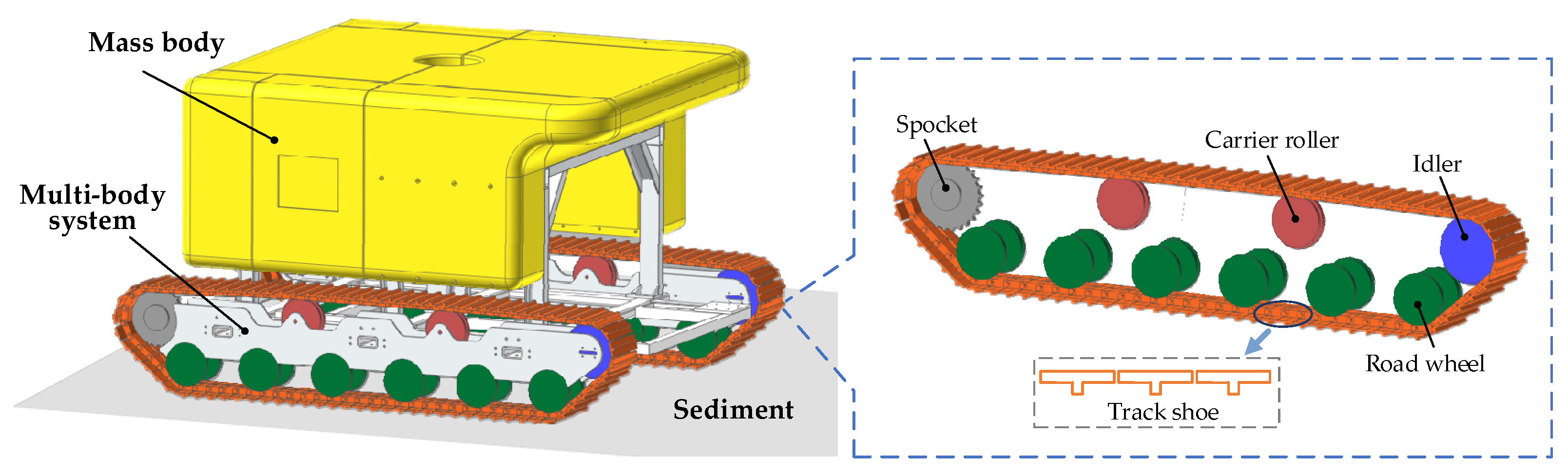
2.1. Conceptual Prototype Design of DSLV
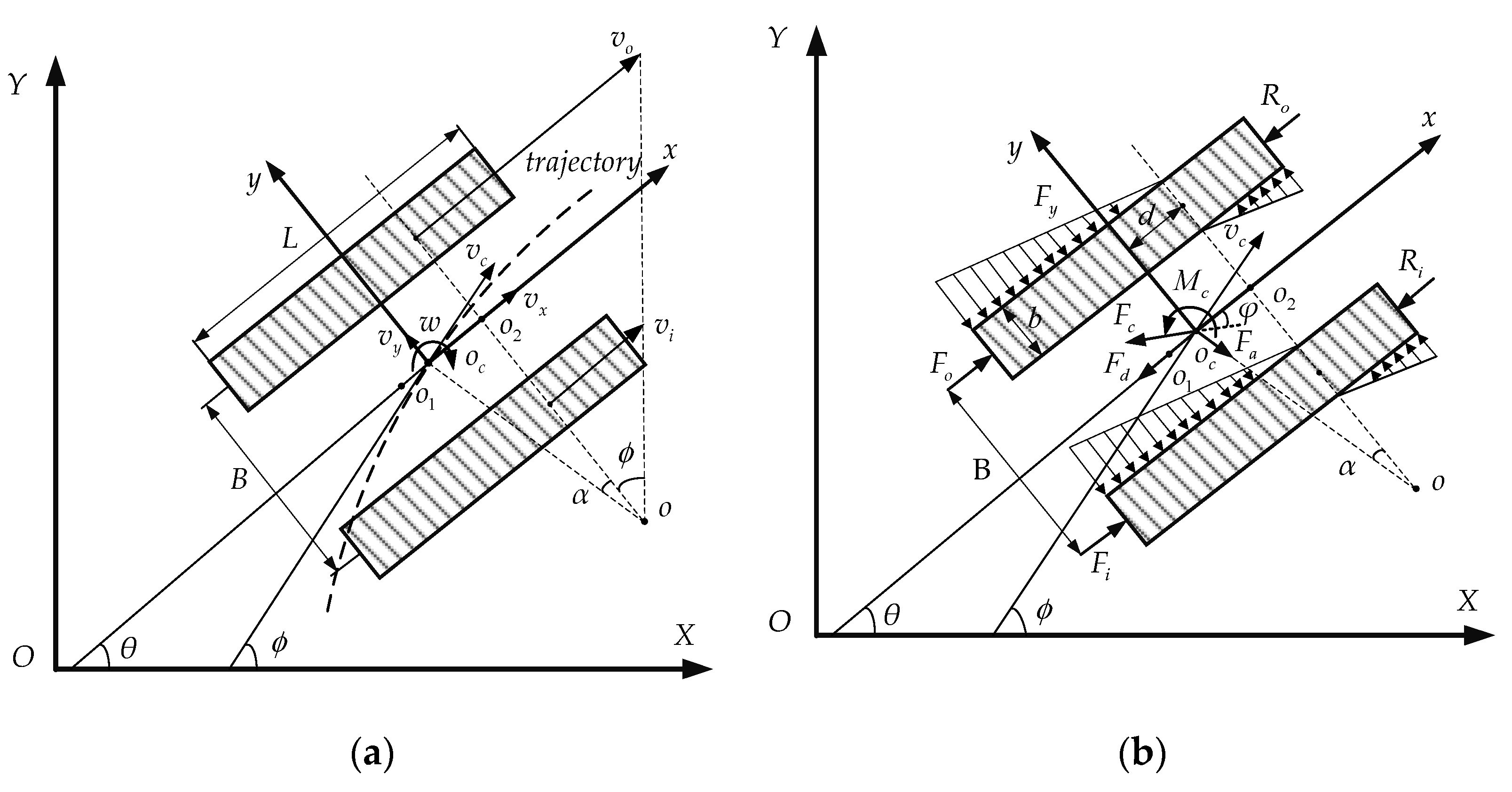
2.2. Motion Model of Black-Box
- The carrier of the vehicle exhibits a symmetrical structure with respect to its longitudinal and transverse axes;
- The coordinate position of the vehicle’s mass centre coincides with the geometric centre of the carrier structure;
- The seafloor is flat in the local area, and motion analysis can be based on a two-dimensional plane.
3. Black-Box Modelling Method
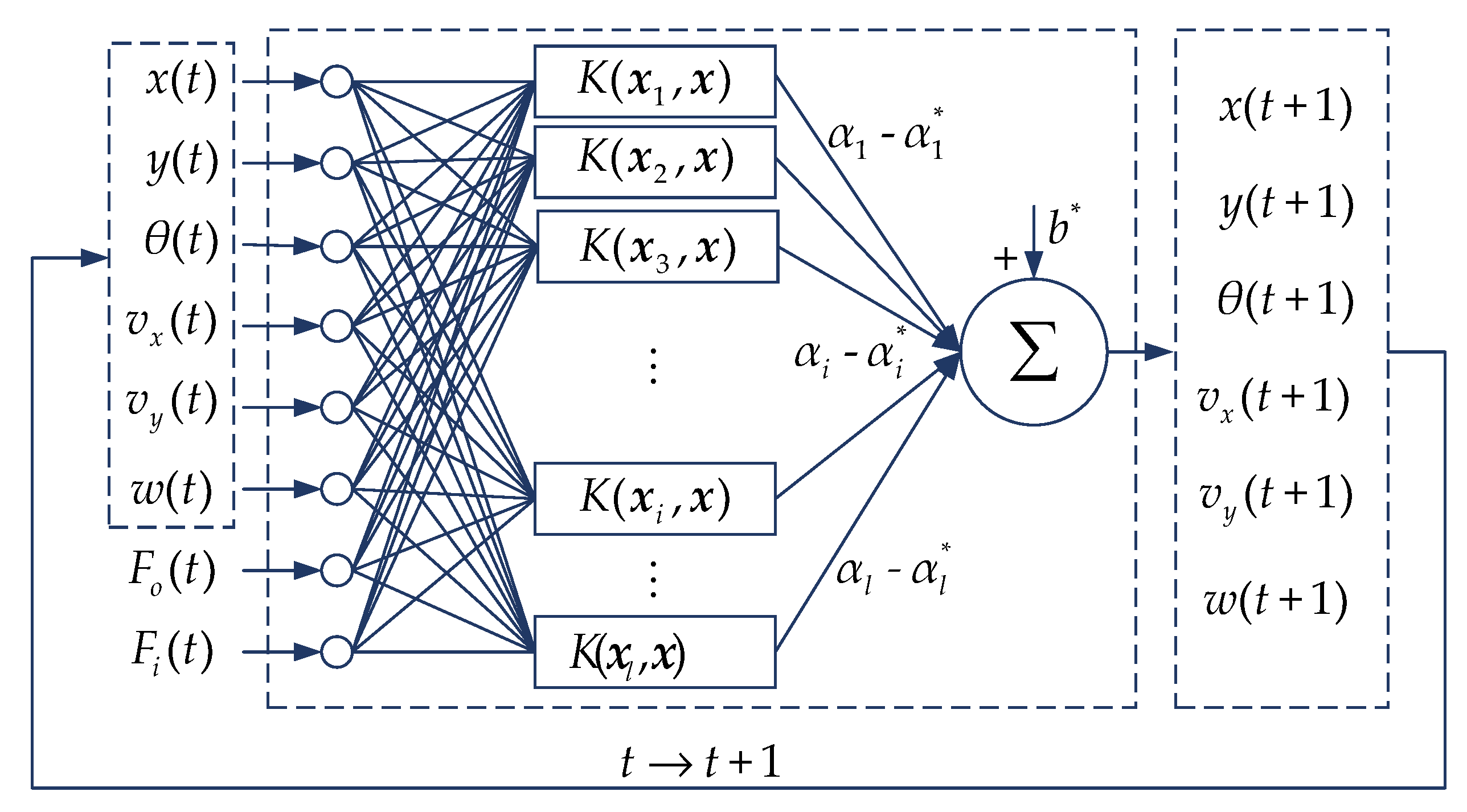
3.1. Support Vector Regression
3.2. Particle Swarm Optimisation
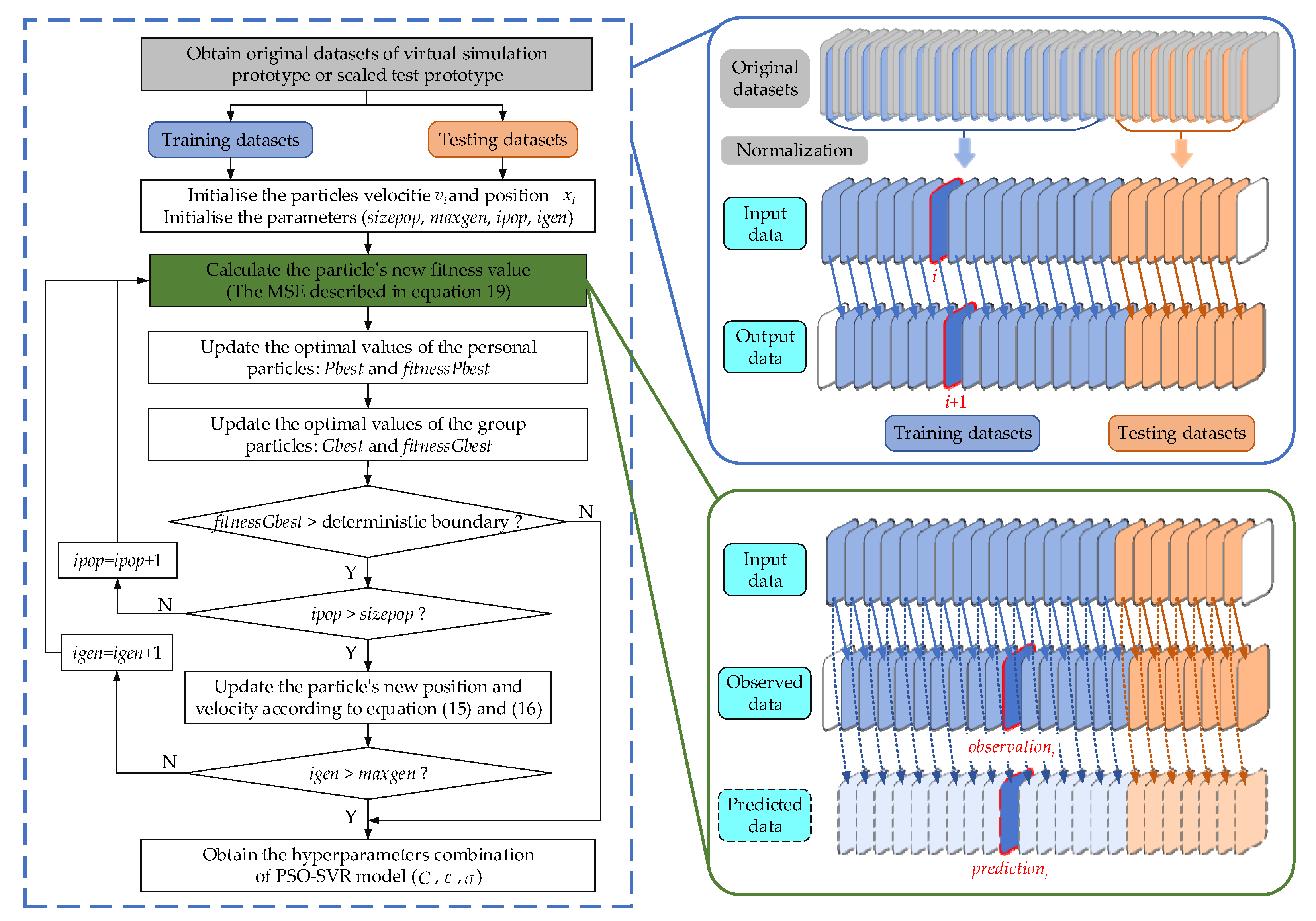
3.3. SVR Optimised by PSO
- Step 1. Obtain training and testing datasets
- Step 2. Initialise particle population
- Step 3. Calculate the fitness value of the particles
- Step 4. Update particles position and velocity
- Step 5. Assessing the convergence of hyperparameters
4. Validation of the Algorithm
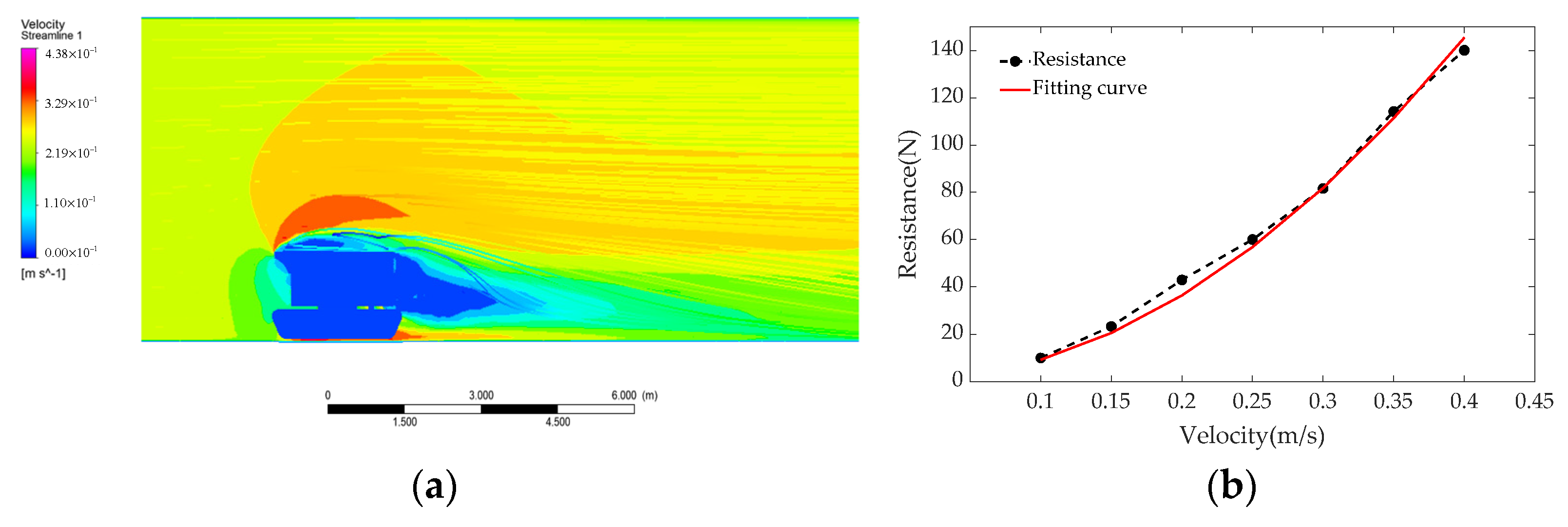
4.1. Hydrodynamic Resistance and Current Interference
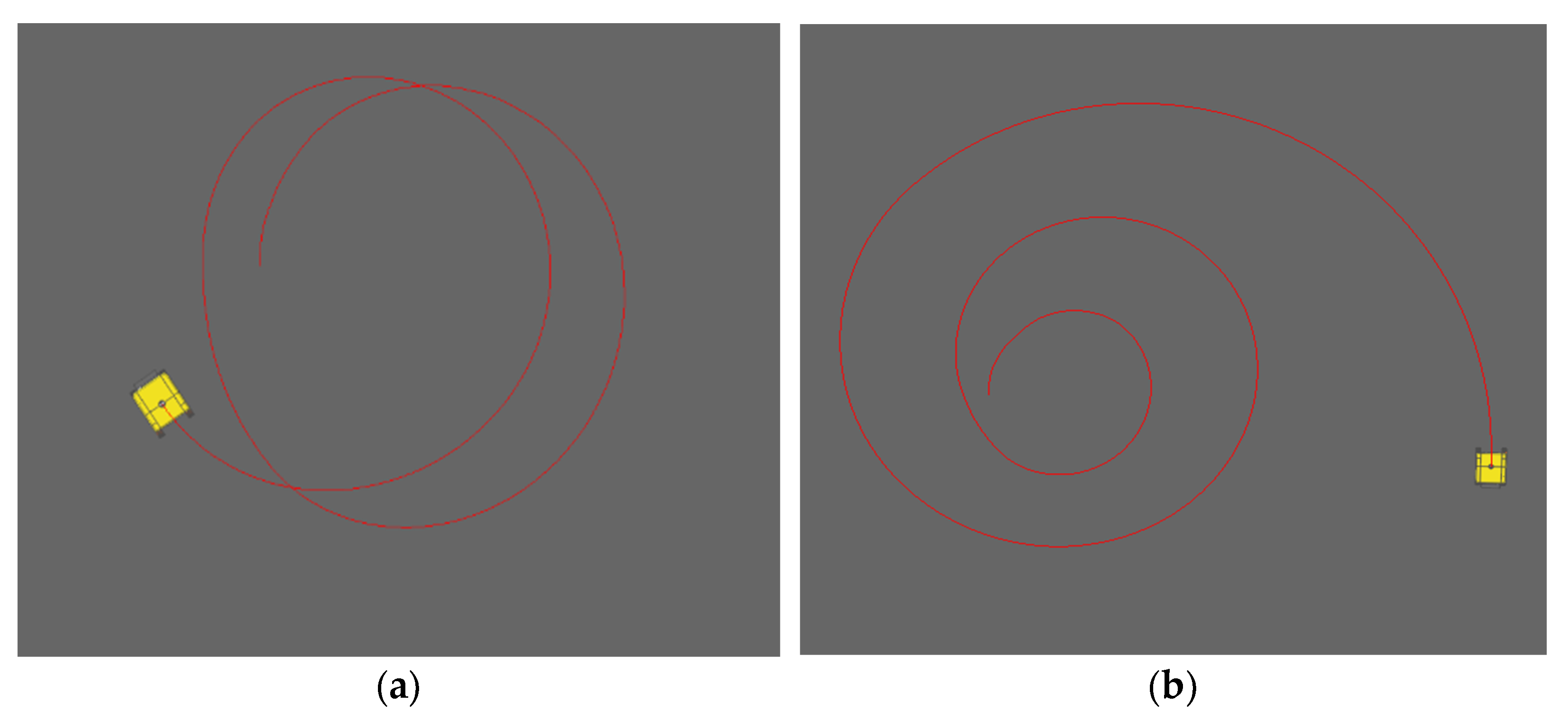
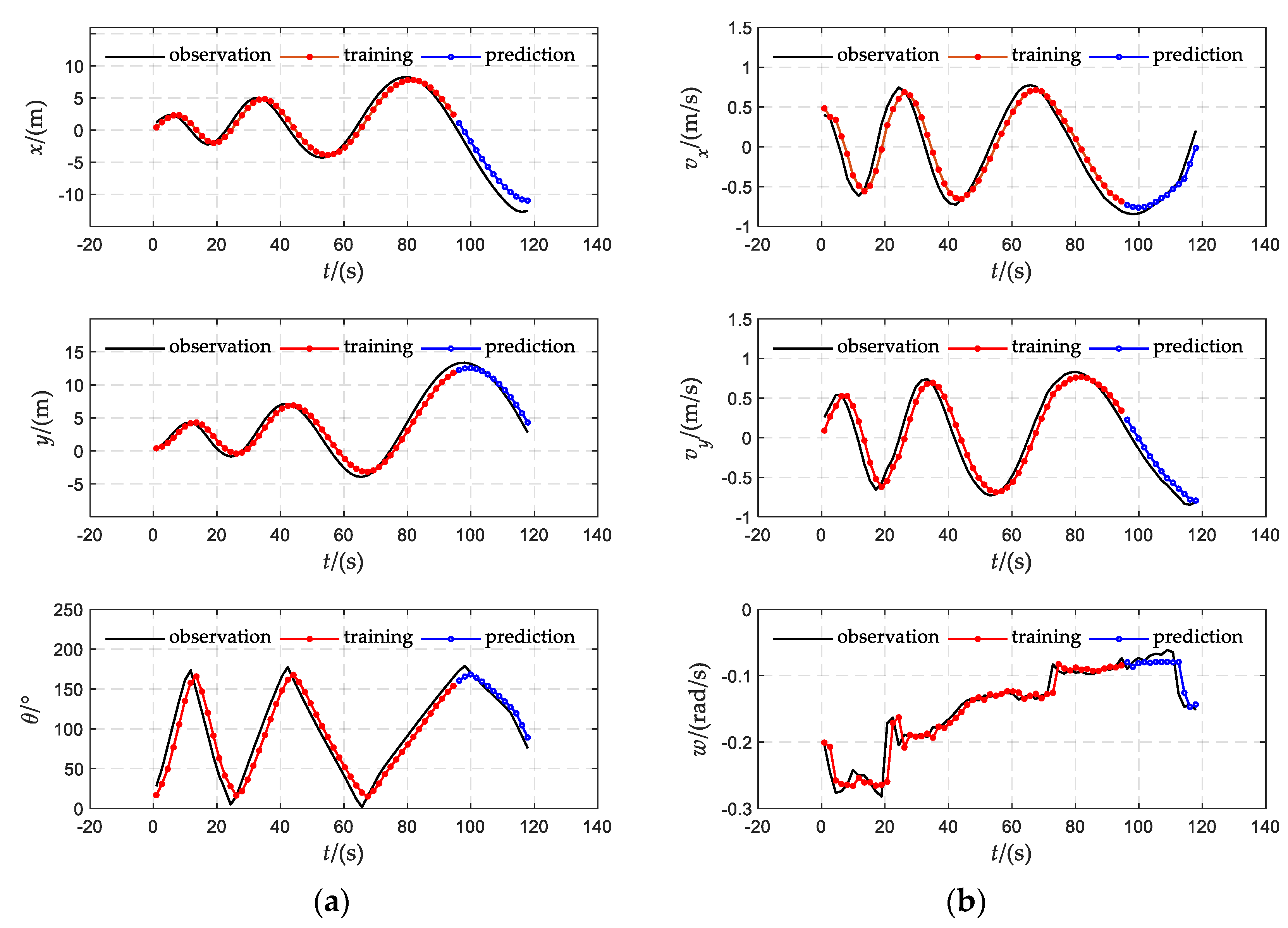
4.2. Simulation of the Virtual Prototype
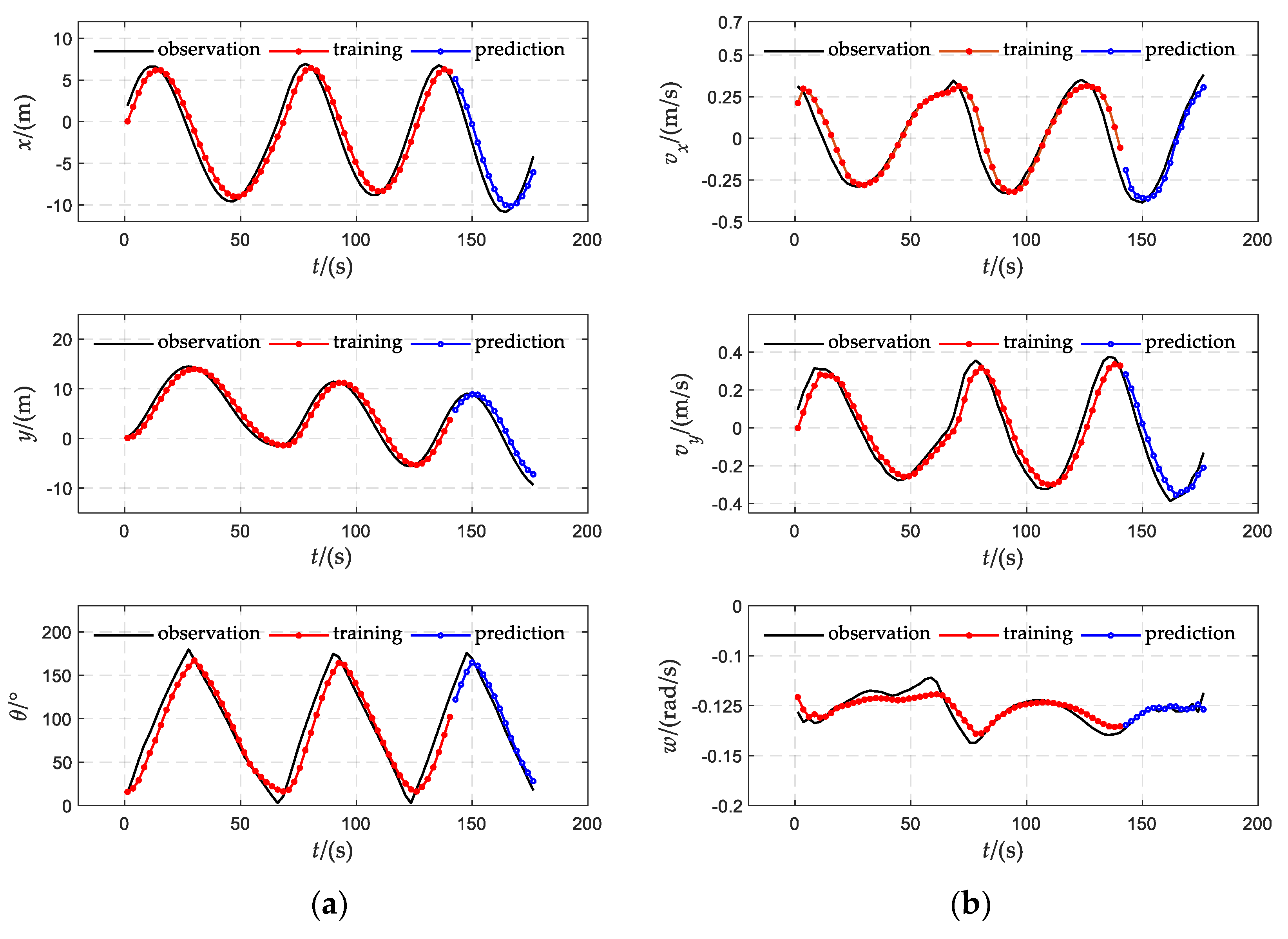
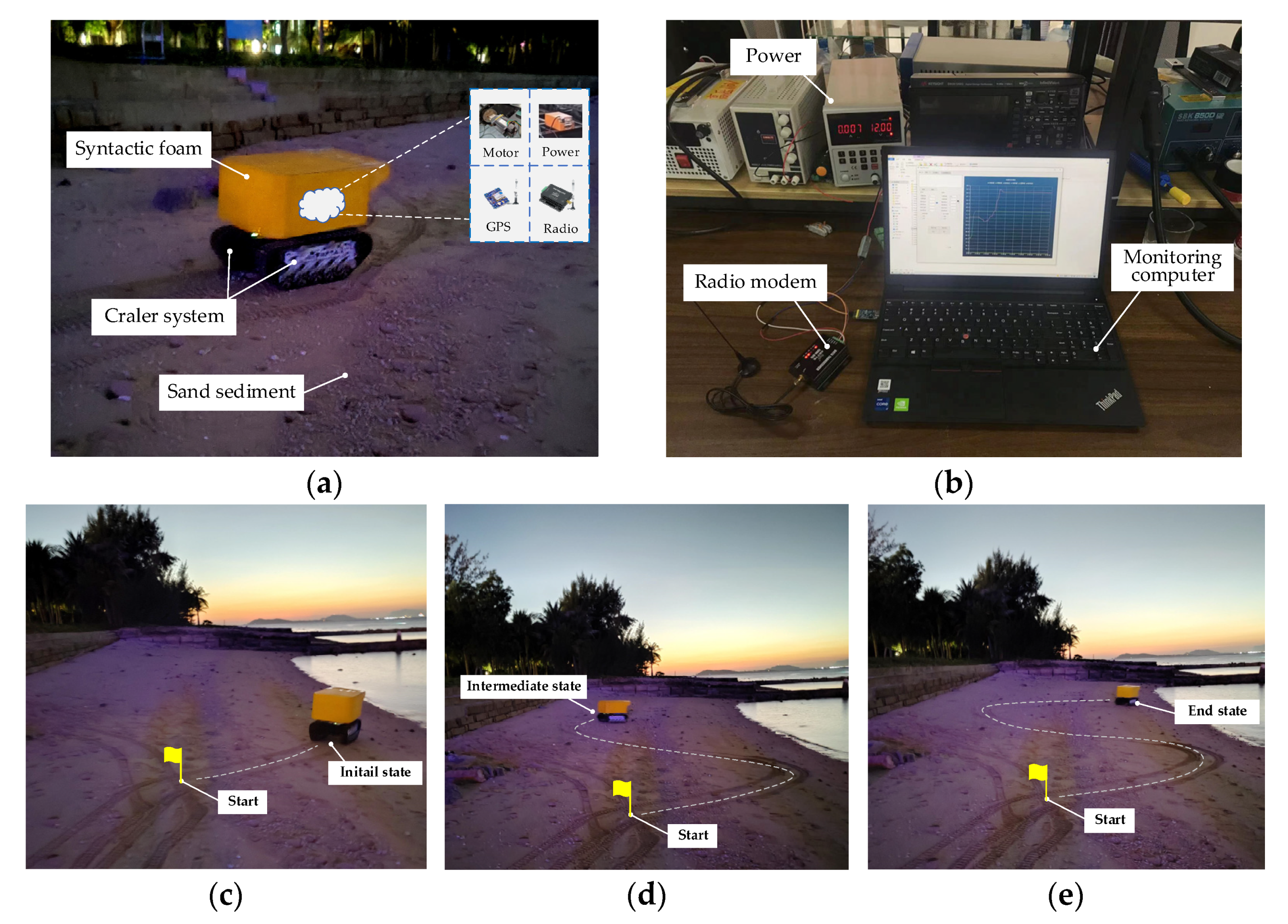
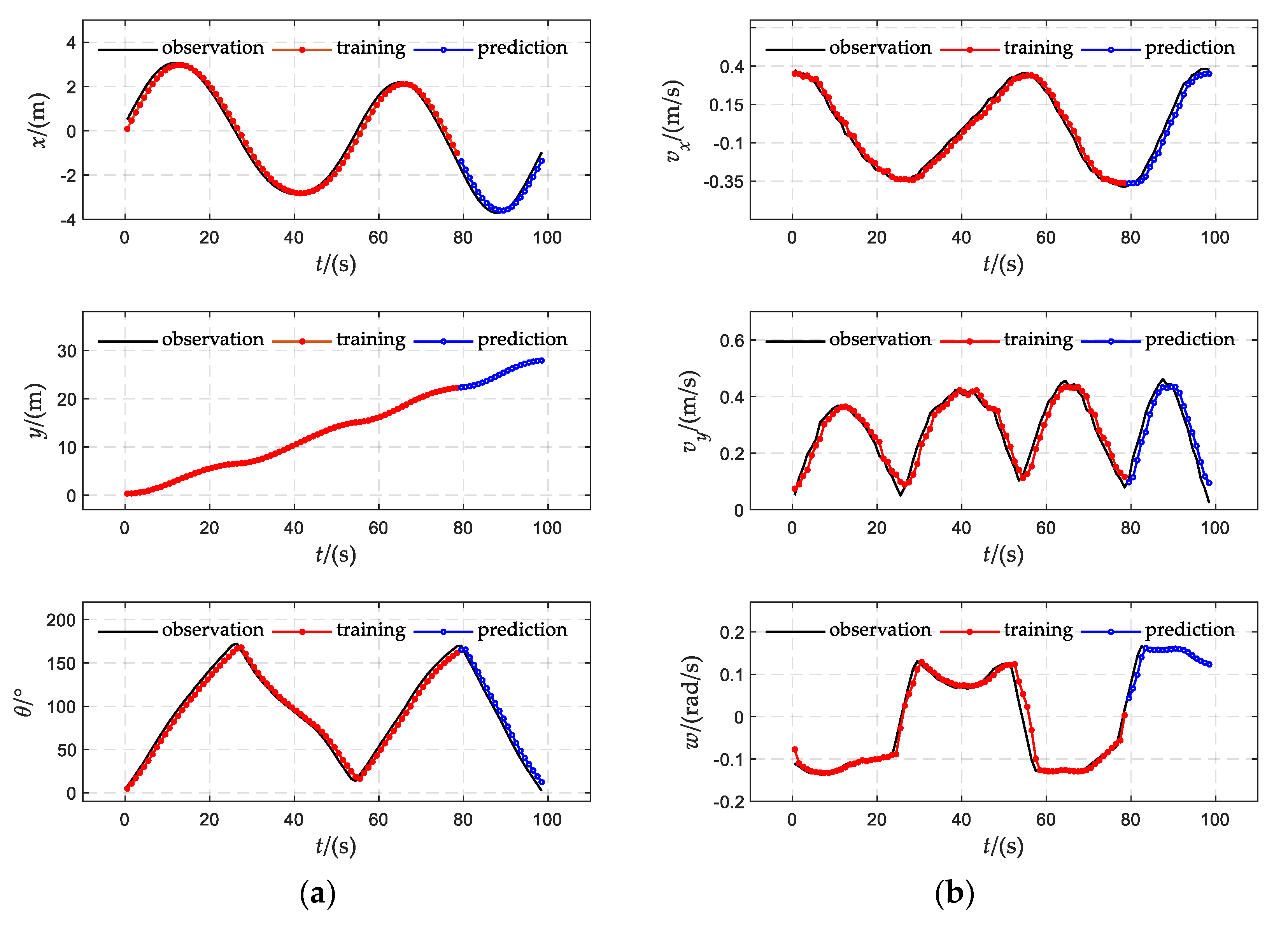
4.3. Experiment of Scaled Test Prototype
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hiraoka, S.; Hirai, M.; Matsui, Y.; Makabe, A.; Minegishi, H.; Tsuda, M.; Juliarni; Rastelli, E.; Danovaro, R.; Corinaldesi, C.; et al. Microbial community and geochemical analyses of trans-trench sediments for understanding the roles of hadal environments. ISME J. 2019, 14, 740–756. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ishibashi, S.; Yoshida, H.; Osawa, H.; Inoue, T.; Tahara, J.; Ito, K.; Watanabe, Y.; Sawa, T.; Hyakudome, T.; Aoki, T. A ROV ABISMO for the Inspection and Sampling in the Deepest Ocean and Its Operation Support System. In Proceedings of the OCEANS 2008—MTS/IEEE Kobe Techno-Ocean Conference, Kobe, Japan, 8–11 April 2008. [Google Scholar]
- Purser, A.; Thomsen, L.; Barnes, C.; Best, M.; Chapman, R.; Hofbauer, M.; Menzel, M.; Wagner, H. Temporal and spatial benthic data collection via an internet operated Deep Sea Crawler. Methods Oceanogr. 2013, 5, 1–18. [Google Scholar] [CrossRef]
- McGill, P.R.; Sherman, A.D.; Hobson, B.W.; Henthorn, R.G.; Chase, A.C.; Smith, K.L. Initial Deployments of the Rover, an Autonomous Bottom-Transecting Instrument Platform for Long-Term Measurements in Deep Benthic Environments. In OCEANS 2007; IEEE: Vancouver, BC, Canada, 2007. [Google Scholar]
- Zhang, Y.; Zhang, Q.; Yang, B.; Zhang, A. Steering Dynamic Modelling and Analysis of a Benthic Small-Scale Tracked Robot. J. Ocean. Technol. 2020, 39, 10. [Google Scholar]
- Hongming, S.; Wei, G.; Yue, Z.; Pengfei, S.; Youbo, Z. Mechanism Design and Diving-Floating Motion Performance Analysis on the Full Ocean Depth Landing Vehicle. Robot 2020, 42, 207–214. [Google Scholar]
- Xu, F.; Rao, Q.H.; Zhang, J.; Ma, W. Compression–shear coupling rheological constitutive model of the deep-sea sediment. Mar. Georesources Geotechnol. 2017, 36, 288–296. [Google Scholar] [CrossRef]
- Feng, X.U.; Rao, Q.H. Turning traction force of tracked mining vehicle based on rheological property of deep-sea sediment—ScienceDirect. Trans. Nonferrous Met. Soc. China 2018, 28, 1233–1240. [Google Scholar]
- Zhang, T.; Dai, Y.; Liu, S.J. Multi-body Dynamic Modeling and Mobility Simulation Analysis of Deep Ocean Tracked Miner. J. Mech. Eng. 2015, 51, 173–180. [Google Scholar] [CrossRef] [Green Version]
- Inoue, T.; Shiosawa, T.; Takagi, K. Dynamic Analysis of Motion of Crawler-Type Remotely Operated Vehicles. IEEE J. Ocean. Eng. 2013, 38, 375–382. [Google Scholar] [CrossRef]
- Sands, T. Development of Deterministic Artificial Intelligence for Unmanned Underwater Vehicles (UUV). J. Mar. Sci. Eng. 2020, 8, 578. [Google Scholar] [CrossRef]
- Shafiei, H.M.; Binazadeh, T. Application of neural network and genetic algorithm in identification of a model of a variable mass underwater vehicle. Ocean. Eng. 2015, 96, 173–180. [Google Scholar] [CrossRef]
- Hamzaoui, Y.E.; Rodríguez, J.; Hernández, J.; Salazar, V. Optimization of operating conditions for steam turbine using an artificial neural network inverse. Appl. Therm. Eng. 2015, 75, 648–657. [Google Scholar] [CrossRef]
- Zhang, W.; Ding, Y.; Wang, X.; Xing, Z.; Xiang, C.; Qingxi, L. Pure Pursuit Control Method Based on SVR Inverse-model for Tractor Navigation. Trans. Chin. Soc. Agric. Mach. 2016, 47, 8. [Google Scholar]
- Wang, X.; Zou, Z.; Ren, R. Black-Box Modeling of Ship Maneuvering Motion in 4 Degrees of Freedom Based on Support Vector Machines. Shipbuild. China 2014, 55, 147–155. [Google Scholar]
- Man, Z.; Hahn, A.; Wen, Y.; Bolles, A. Parameter Identification of Ship Maneuvering Models Using Recursive Least Square Method Based on Support Vector Machines. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 23–29. [Google Scholar]
- Koshurina, A.A.; Krasheninnikov, M.S.; Dorofeev, R.A.; Kurilsky, D.M.; Ivanov, S.A. The Analytical Review of the Condition of Unmanned Underwater Vehicles. In Proceedings of the International Conference on Advanced Manufacturing & Industrial Application, Johor Bahru, Malaysia, 20–22 September 2015. [Google Scholar]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Hazan, E.; Agarwal, A.; Kale, S. Logarithmic Regret Algorithms for Online Convex Optimization. Mach. Learn. 2007, 69, 169–192. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, L. Properties of equation reformulation of the Karush–Kuhn–Tucker condition for nonlinear second order cone optimization problems. Math. Methods Oper. Res. 2009, 70, 195. [Google Scholar] [CrossRef]
- Lu, Y.; Sundararajan, N. Performance evaluation of a sequential minimal radial basis function (RBF) neural network learning algorithm. IEEE Trans. Neural Netw. 1998, 9, 308–318. [Google Scholar] [PubMed]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the Icnn95-International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995. [Google Scholar]
- Zhao, Y.; Liu, Z.; Zhang, Y.; Li, J.; Wang, M.; Wang, W.; Xu, J. In situ observation of contour currents in the northern South China Sea: Applications for deepwater sediment transport. Earth Planet. Sci. Lett. 2015, 430, 477–485. [Google Scholar] [CrossRef]
- Marengo, E.; Bobba, M.; Robotti, E.; Liparota, M.C. Modeling of the Polluting Emissions from a Cement Production Plant by Partial Least-Squares, Principal Component Regression, and Artificial Neural Networks. Environ. Sci. Technol. 2006, 40, 272–280. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Chen, X.; Gao, Q.; He, J.S.; Liu, S.J. In-situ shearing strength and penetration resistance testing of soft seabed sediments in western mining area. J. Cent. South Univ. (Sci. Technol.) 2010, 41, 6. [Google Scholar]
- Jiao, X.; Zhang, W.; Peng, B. RecurDyn: Optimization of Multi-Body System Simulation Technology; Tsinghua University Press: Beijing, China, 2010. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| ) | 0.4171 |
| ) | 0.012 |
| Exponential Number (n) | 0.7 |
| Cohesion (c) | 0.00172 |
| Shearing Resistance Angle | 29 |
| Shearing Deformation Modulus (k) | 25 |
| Sinkage Radio | 0.05 |
| State Quantities | x (m) | y (m) | w (rad/s) | |||
|---|---|---|---|---|---|---|
| MSE | 0.0394 | 0.0301 | 0.0174 | 0.0269 | 0.0337 | 0.0254 |
| 0.9305 | 0.9751 | 0.9520 | 0.9703 | 0.9381 | 0.5351 |
| State Quantities | x (m) | y (m) | w (rad/s) | |||
|---|---|---|---|---|---|---|
| MSE | 0.0942 | 0.0104 | 0.0109 | 0.0174 | 0.0204 | 0.0286 |
| 0.9982 | 0.9935 | 0.9722 | 0.9904 | 0.9946 | 0.7348 |
| State Quantities | x (m) | y (m) | w (rad/s) | |||
|---|---|---|---|---|---|---|
| MSE | 0.0091 | 0.0032 | 0.0988 | 0.0285 | 0.0492 | 0.0115 |
| 0.8850 | 0.9960 | 0.9805 | 0.9909 | 0.8892 | 0.8351 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, H.; Guo, W.; Lan, Y.; Wei, Z.; Gao, S.; Sun, Y.; Fu, Y. Black-Box Modelling and Prediction of Deep-Sea Landing Vehicles Based on Optimised Support Vector Regression. J. Mar. Sci. Eng. 2022, 10, 575. https://doi.org/10.3390/jmse10050575
Sun H, Guo W, Lan Y, Wei Z, Gao S, Sun Y, Fu Y. Black-Box Modelling and Prediction of Deep-Sea Landing Vehicles Based on Optimised Support Vector Regression. Journal of Marine Science and Engineering. 2022; 10(5):575. https://doi.org/10.3390/jmse10050575
Chicago/Turabian StyleSun, Hongming, Wei Guo, Yanjun Lan, Zhenzhuo Wei, Sen Gao, Yu Sun, and Yifan Fu. 2022. "Black-Box Modelling and Prediction of Deep-Sea Landing Vehicles Based on Optimised Support Vector Regression" Journal of Marine Science and Engineering 10, no. 5: 575. https://doi.org/10.3390/jmse10050575