
Analysis, Simulation and Experimental Study of the Tensile Stress Calibration of Ceramic Cylindrical Pressure Housings

 , , and
, , and
Abstract
:1. Introduction
2. Problem Description
2.1. Material Properties
2.2. Structure Design
3. Mechanical Model
3.1. Frictionless Contact Model of an Infinitely Rigid Flat Annular Indenter
3.2. Approximate Contact Model of Ceramic Pressure Housing
4. Model Validation
4.1. Preliminary Design
4.2. FEM Simulations
5. Results and Discussion
5.1. Bearing Capacity
5.2. Tensile Stress on Ceramic Contact Surfaces
5.3. Hydrostatic Pressure Experiments
6. Conclusions
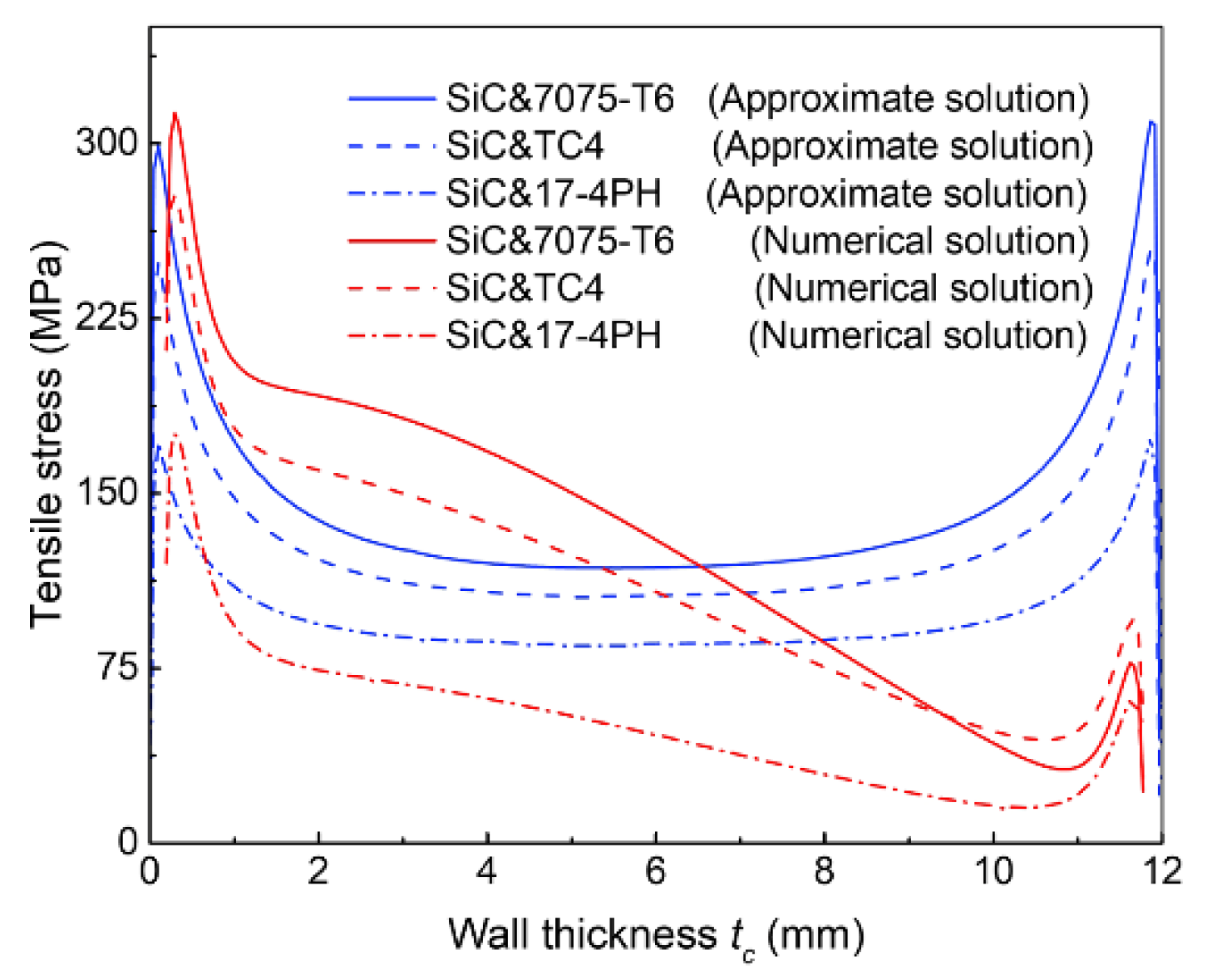
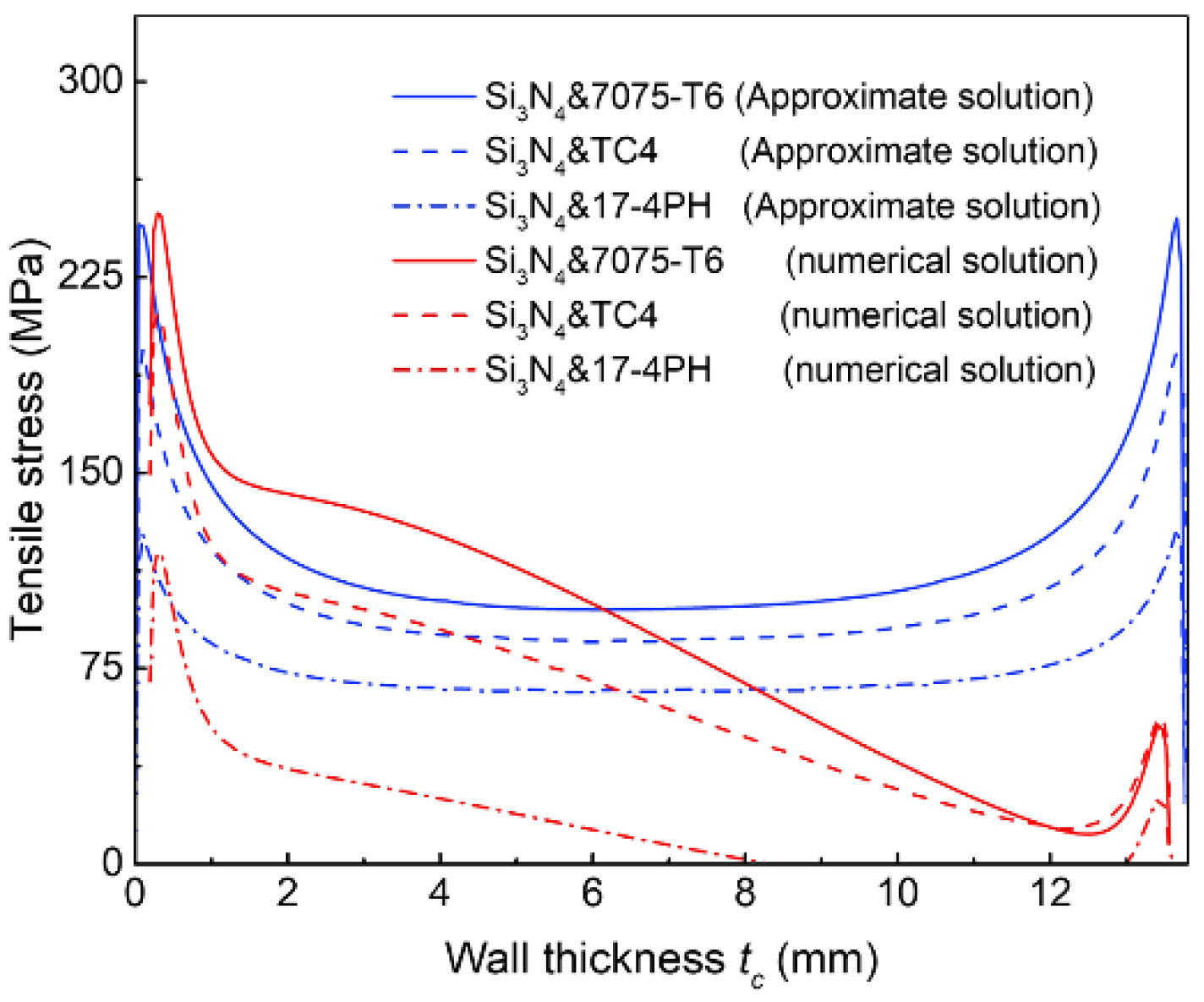
- The approximate model proposed in this paper has acceptable errors when analyzing the tensile stress on the ceramic contact surface. Among the nine groups of ceramic pressure housings, the absolute errors between the approximation model and FEM simulations are no more than 14.2%.
- The results of the approximate model and FEM simulations for nine groups of ceramic pressure housings show that the smaller the difference in Young’s modulus between the ceramic and metal, the lower the tensile stress on the contact surface. The maximum tensile stress on the ceramic contact surface occurs close to the inner boundaries (r = ri), which provides guidance for subsequent structure optimization. The contact faces of the ceramic pressure housing can be redesigned to achieve an equivalent tensile stress distribution to prevent localized tensile stress from exceeding the ceramic’s limit.
- The results of hydrostatic pressure experiments show that the ceramic pressure housing may fail even with a safety factor of slightly greater than 1. Due to the complexity of the adhesive process, the dimensional accuracy of the contact region is difficult to control. The actual tensile stress on the ceramic contact surface under hydrostatic pressure is difficult to calculate accurately. Therefore, the selection of the tensile stress safety factor must be given a greater margin. In this paper, we recommend 1.5~–2.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jamieson, A.J.; Fujii, T.; Mayor, D.J.; Solan, M.; Priede, I.G. Hadal trenches: The ecology of the deepest places on Earth. Trends Ecol. Evol. 2010, 25, 190–197. [Google Scholar] [CrossRef] [PubMed]
- Agostini, V.; Arico, S.; Briones, E.; Clark, M.; Cresswell, I.; Gjerde, K.; Grant, S.; Niewijk, D.; Polacheck, A.; Rice, J. Global Open Oceans and Deep Seabed (GOODS) Biogeographic Classification; UNESCO-IOC Technical Series; UNESCO-IOC: Paris, France, 2009; Volume 84. [Google Scholar]
- Du, M.; Peng, X.; Zhang, H.; Ye, C.; Dasgupta, S.; Li, J.; Li, J.; Liu, S.; Xu, H.; Chen, C.; et al. Geology, environment, and life in the deepest part of the world’s oceans. Innovation 2021, 2, 100–109. [Google Scholar] [CrossRef] [PubMed]
- Jamieson, A.J. Ecology of deep oceans: Hadal trenches. In eLS; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- LaSalvia, J.C.; Campbell, J.; Swab, J.; McCauley, J. Beyond hardness: Ceramics and ceramic-based composites for protection. Jom 2010, 62, 16–23. [Google Scholar] [CrossRef]
- Otitoju, T.A.; Okoye, P.U.; Chen, G.; Li, Y.; Okoye, M.O.; Li, S. Advanced ceramic components: Materials, fabrication, and applications. J. Ind. Eng. Chem. 2020, 85, 34–65. [Google Scholar] [CrossRef]
- Stachiw, J.; Peters, D.; McDonald, G. Ceramic external pressure housings for deep sea vehicles. In Proceedings of the OCEANS 2006, Singapore, 16–19 May 2006; pp. 1–7. [Google Scholar]
- Bowen, A.D.; Yoerger, D.R.; Taylor, C.; McCabe, R.; Howland, J.; Gomez-Ibanez, D.; Kinsey, J.C.; Heintz, M.; McDonald, G.; Peters, D.B. The Nereus hybrid underwater robotic vehicle for global ocean science operations to 11,000 m depth. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–10. [Google Scholar]
- Asakawa, K.; Nakamura, M.; Maeda, Y.; Hyakudome, T.; Ishihara, Y. Development of underwater glider for long-term virtual mooring: Aiming 6000 m depth with ceramic housing. In Proceedings of the 2016 Techno-Ocean (Techno-Ocean), Kobe, Japan, 6–8 October 2016; pp. 419–424. [Google Scholar]
- Sun, S.; Chen, F.; Zhao, M. Numerical simulation and analysis of the underwater implosion of spherical hollow ceramic pressure hulls in 11,000 m depth. J. Ocean Eng. Sci. 2022. [Google Scholar] [CrossRef]
- Zhang, X.; Feng, M.; Zhao, M.; Zhang, P.; He, C.; Qi, H.; Han, W.; Guo, F. Failure of silicon nitride ceramic flotation spheres at critical state of implosion. Appl. Ocean Res. 2020, 97, 102080. [Google Scholar] [CrossRef]
- Asakawa, K.; Hyakudome, T.; Yoshida, M.; Okubo, N.; Ito, M.; Terada, I. Ceramic Pressure-Tight Housings for Ocean-Bottom Seismometers Applicable to 11-km Water Depth. IEEE J. Ocean. Eng. 2012, 37, 756–763. [Google Scholar] [CrossRef] [Green Version]
- Johnson, R.P.; Kurkchubasche, R.; Stachiw, J.D. Naval Command Control and Ocean Surveillance Center RDT and E DIV San Diego CA. Effect of Different Axial Bearing Supports on the Fatigue Life of Ceramic Pressure Housings; Defense Technical Information Center: Fort Belvoir, VA, USA, 1993. [Google Scholar]
- Takagawa, S. New ceramic pressure hull design for deep water applications. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, Australia, 24–27 May 2010; pp. 1–6. [Google Scholar]
- Danzer, R. On the relationship between ceramic strength and the requirements for mechanical design. J. Eur. Ceram. Soc. 2014, 34, 3435–3460. [Google Scholar] [CrossRef]
- Pouraliakbar, H.; Monazzah, A.H.; Bagheri, R.; Reihani, S.S.; Khalaj, G.; Nazari, A.; Jandaghi, M. Toughness prediction in functionally graded Al6061/SiCp composites produced by roll-bonding. Ceram. Int. 2014, 40, 8809–8825. [Google Scholar] [CrossRef]
- Rafieipour, M.H.; Nazari, A.; Mohandesi, M.A.; Khalaj, G. Improvement compressive strength of cementitious composites in different curing media by incorporating ZrO2 nanoparticles. Mater. Res. 2012, 15, 177–184. [Google Scholar] [CrossRef] [Green Version]
- Collins, W. On the solution of some axisymmetric boundary value problems by means of integral equations: VIII. Potential problems for a circular annulus. Proc. Edinburgh Math. Soc. 1963, 13, 235–246. [Google Scholar] [CrossRef] [Green Version]
- Shibuya, T.; Koizumi, T.; Nakahara, I. An elastic contact problem for a half-space indented by a flat annular rigid stamp. Int. J. Eng. Sci. 1974, 12, 759–771. [Google Scholar] [CrossRef]
- Willert, E.; Li, Q.; Popov, V.L. The JKR-adhesive normal contact problem of axisymmetric rigid punches with a flat annular shape or concave profiles. Facta Univ. Ser. Mech. Eng. 2016, 14, 281–292. [Google Scholar] [CrossRef] [Green Version]
- Popov, V.L.; Heß, M.; Willert, E. Handbook of Contact Mechanics: Exact Solutions of Axisymmetric Contact Problems; Springer Nature: Berlin, Germany, 2019. [Google Scholar]
- Ciavarella, M. An approximate JKR solution for a general contact, including rough contacts. J. Mech. Phys. Solids 2018, 114, 209–218. [Google Scholar] [CrossRef] [Green Version]
- Jordan, E.H.; Urban, M.R. An approximate analytical expression for elastic stress in flat punch problems. Wear 1999, 236, 134–143. [Google Scholar] [CrossRef]
- McDonald, G. Operations to 11,000 m: Nereus ceramic housing design and analysis. In Proceedings of the 2013 OCEANS-San Diego, San Diego, CA, USA, 23–27 September 2013; pp. 1–5. [Google Scholar]
- Gdoutos, E.; Theocaris, P. Stress concentrations at the apex of a plane indenter acting on an elastic half plane. J. Appl. Mech. 1975, 42, 688–692. [Google Scholar] [CrossRef]
- Pan, B.; Cui, W. An overview of buckling and ultimate strength of spherical pressure hull under external pressure. Mar. Struct. 2010, 23, 227–240. [Google Scholar] [CrossRef]
- Wang, P.; Wang, Y.; Yang, S.; Niu, W.; Wang, X.; Liu, X. Effects of Hemispherical End-caps Geometric Optimization on Fatigue Life of Ceramic External Pressure Housing. In Proceedings of the Global Oceans 2020, Singapore, 5–30 October 2020; pp. 1–5. [Google Scholar]
- Chinese Underwater Glider Smashes World Record with 10,000-Meter Deep-Water Descent. Available online: http://www.chinesetoday.com/en/article/1295572 (accessed on 13 March 2022).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Specific Gravity (g/cm3) | Young’s Modulus (GPa) | Compressive Strength (MPa) | Tensile Stress (Yield) (MPa) | Poisson’s Ratio |
|---|---|---|---|---|---|
| Al2O3 (99%) | 3.9 | 390 | 2160 | 310 | 0.23 |
| Si3N4 | 3.2 | 310 | 2810 | 810 | 0.27 |
| SiC | 3.12 | 440 | 3400 | 340 | 0.18 |
| Aluminum 7075-T6 | 2.78 | 71 | 480 | 480 | 0.33 |
| Titanium TC4 | 4.45 | 110 | 900 | 900 | 0.3 |
| Steel 17-4PH | 7.89 | 207 | 1160 | 1160 | 0.28 |
| No. | Groups | Lc (mm) | Dc-I (mm) | Dc-m/Ds-m (mm) | tc (mm) | ts (mm) |
|---|---|---|---|---|---|---|
| 1 | SiC&7075-T6 | 800 | 287 | 299 | 12.0 | 22.4 |
| 2 | SiC&TC4 | 800 | 287 | 299 | 12.0 | 12 |
| 3 | SiC&17-4PH | 800 | 287 | 299 | 12.0 | 9.2 |
| 4 | Al2O3&7075-T6 | 800 | 287 | 299.5 | 12.5 | 22.4 |
| 5 | Al2O3&TC4 | 800 | 287 | 299.5 | 12.5 | 12 |
| 6 | Al2O3&17-4PH | 800 | 287 | 299.5 | 12.5 | 9.2 |
| 7 | Si3N4&7075-T6 | 800 | 287 | 300.8 | 13.8 | 22.4 |
| 8 | Si3N4&TC4 | 800 | 287 | 300.8 | 13.8 | 12 |
| 9 | Si3N4&17-4PH | 800 | 287 | 300.8 | 13.8 | 9.2 |
| Description | Specific Gravity | Shear Modulus | Flexural Stress | Poisson’s Ratio | Flexural Modulus |
|---|---|---|---|---|---|
| Value | 1.05 g/cm3 | 1.3 GPa | 60 MPa | 0.40 | 1.9 GPa |
| Groups | SiC& 7075-T6 | SiC& TC4 | SiC& 17-4PH | Al2O3& 7075-T6 | Al2O3& TC4 | Al2O3& 17-4PH | Si3N4& 7075-T6 | Si3N4& TC4 | Si3N4& 17-4PH |
|---|---|---|---|---|---|---|---|---|---|
| γ | 0.416 | 0.382 | 0.317 | 0.408 | 0.371 | 0.303 | 0.389 | 0.348 | 0.276 |
| κ | 2.97 | 2.75 | 2.99 | 3.14 | 2.90 | 2.97 | 2.87 | 2.79 | 3.14 |
| Description | Materials | Dc-o/Lc/tc (mm) | W/D | Safety Facter | Applications |
|---|---|---|---|---|---|
| Stachiw et al. [7] and Bowen et al. [8] | 96% AL2O3&TC4 | 355/432/15.2 | 0.58 | 1.5 | “Nereus” HROV |
| 96% AL2O3&TC4 | 191/435/10 | 0.70 | 1.5 | “Nereus” HROV | |
| This work | SiC&TC4 | 314/800/13.5 | 0.52 | 1.5 | “Petrel-X PLUS” HG |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Wang, Y.; Yang, S.; Niu, W.; Wang, X.; Li, P. Analysis, Simulation and Experimental Study of the Tensile Stress Calibration of Ceramic Cylindrical Pressure Housings. J. Mar. Sci. Eng. 2022, 10, 499. https://doi.org/10.3390/jmse10040499
Wang P, Wang Y, Yang S, Niu W, Wang X, Li P. Analysis, Simulation and Experimental Study of the Tensile Stress Calibration of Ceramic Cylindrical Pressure Housings. Journal of Marine Science and Engineering. 2022; 10(4):499. https://doi.org/10.3390/jmse10040499
Chicago/Turabian StyleWang, Peng, Yanhui Wang, Shaoqiong Yang, Wendong Niu, Xuehao Wang, and Penghao Li. 2022. "Analysis, Simulation and Experimental Study of the Tensile Stress Calibration of Ceramic Cylindrical Pressure Housings" Journal of Marine Science and Engineering 10, no. 4: 499. https://doi.org/10.3390/jmse10040499