Hydrodynamic Performance of Full-Scale T0 and T90 Codends with and without a Codend Cover


Abstract
:1. Introduction
2. Materials and Methods
2.1. Gear Specifications
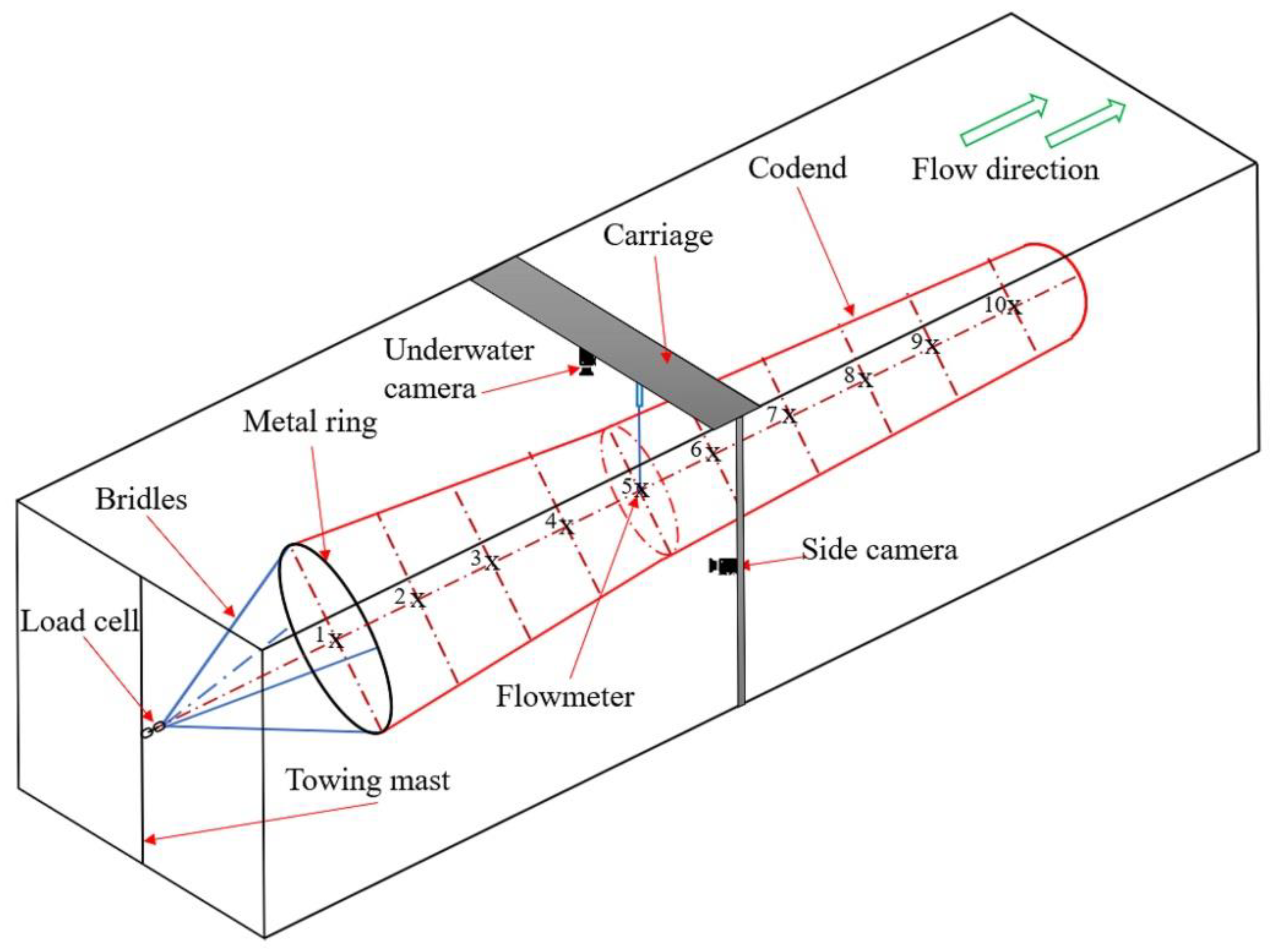
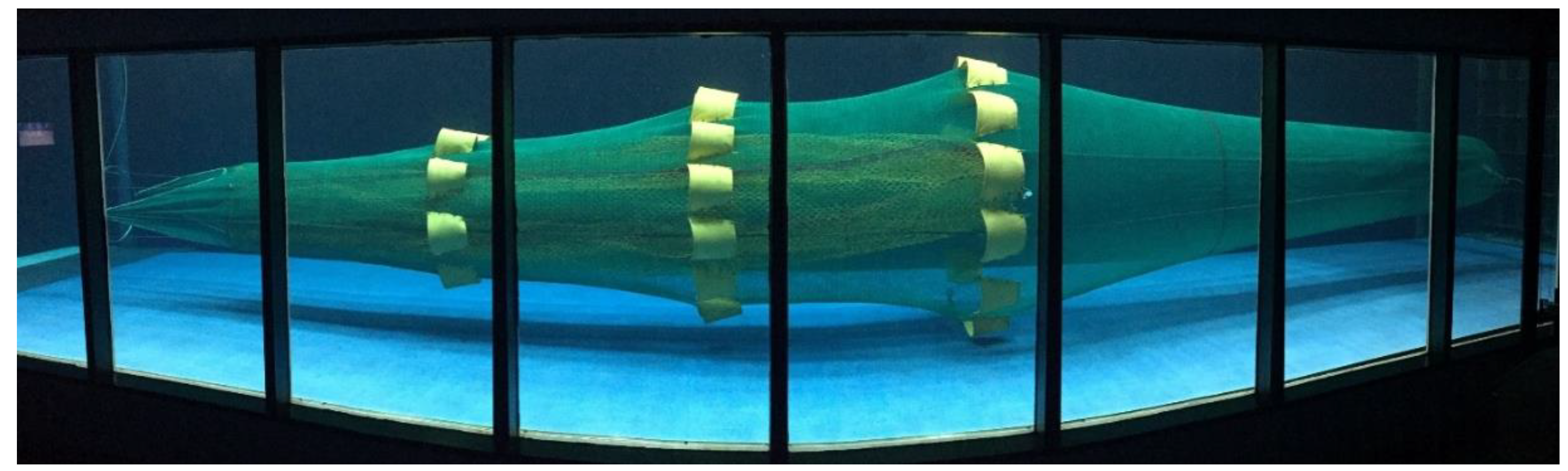
2.2. Flume Tank
2.3. Codend Hydrodynamics without a Cover
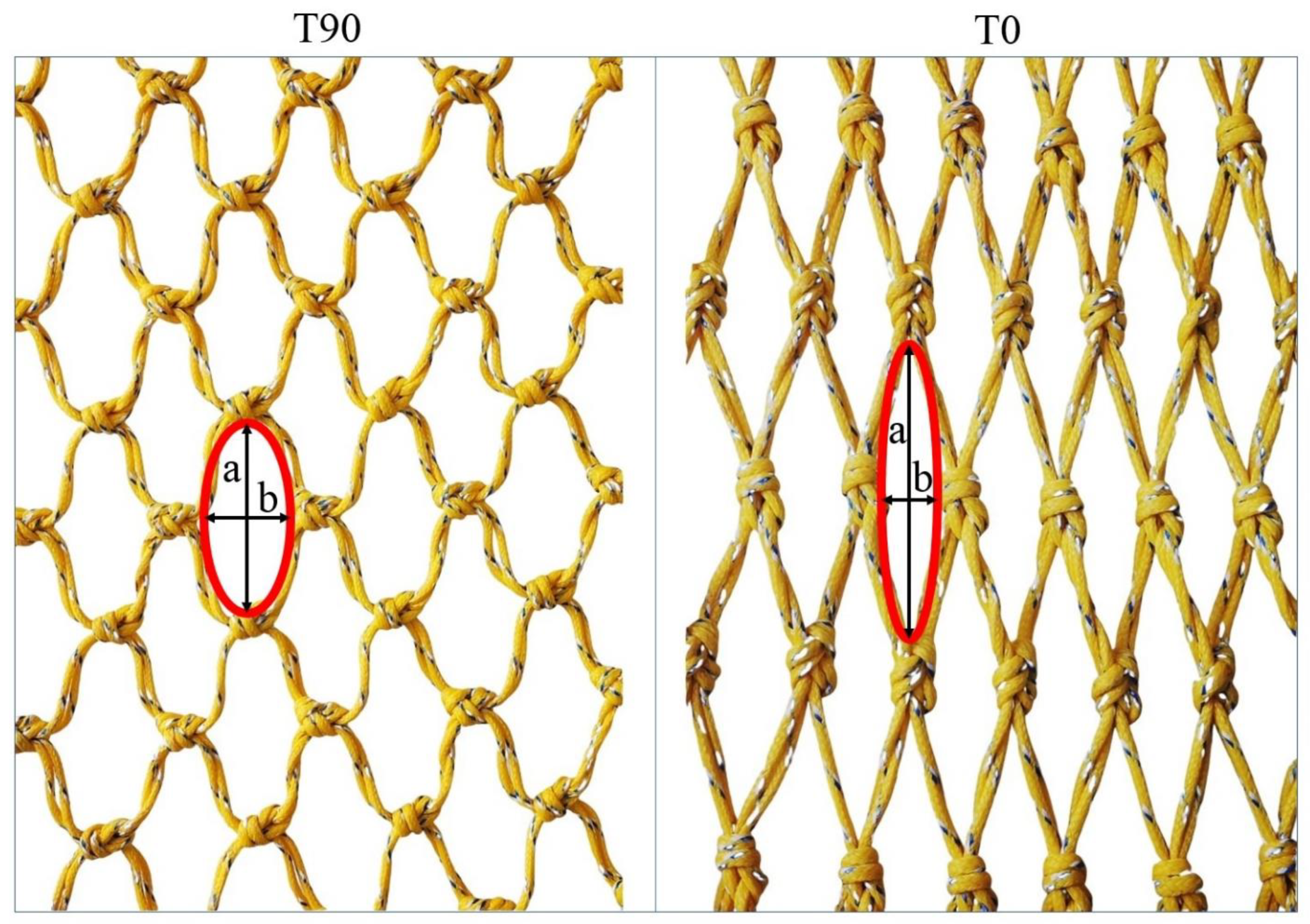
2.3.1. Mesh Opening
2.3.2. Drag
2.4. Codend Hydrodynamics with a Cover
2.5. Statistical Analysis
3. Results
3.1. Gear Specifications
3.2. Codend Hydrodynamics without a Cover
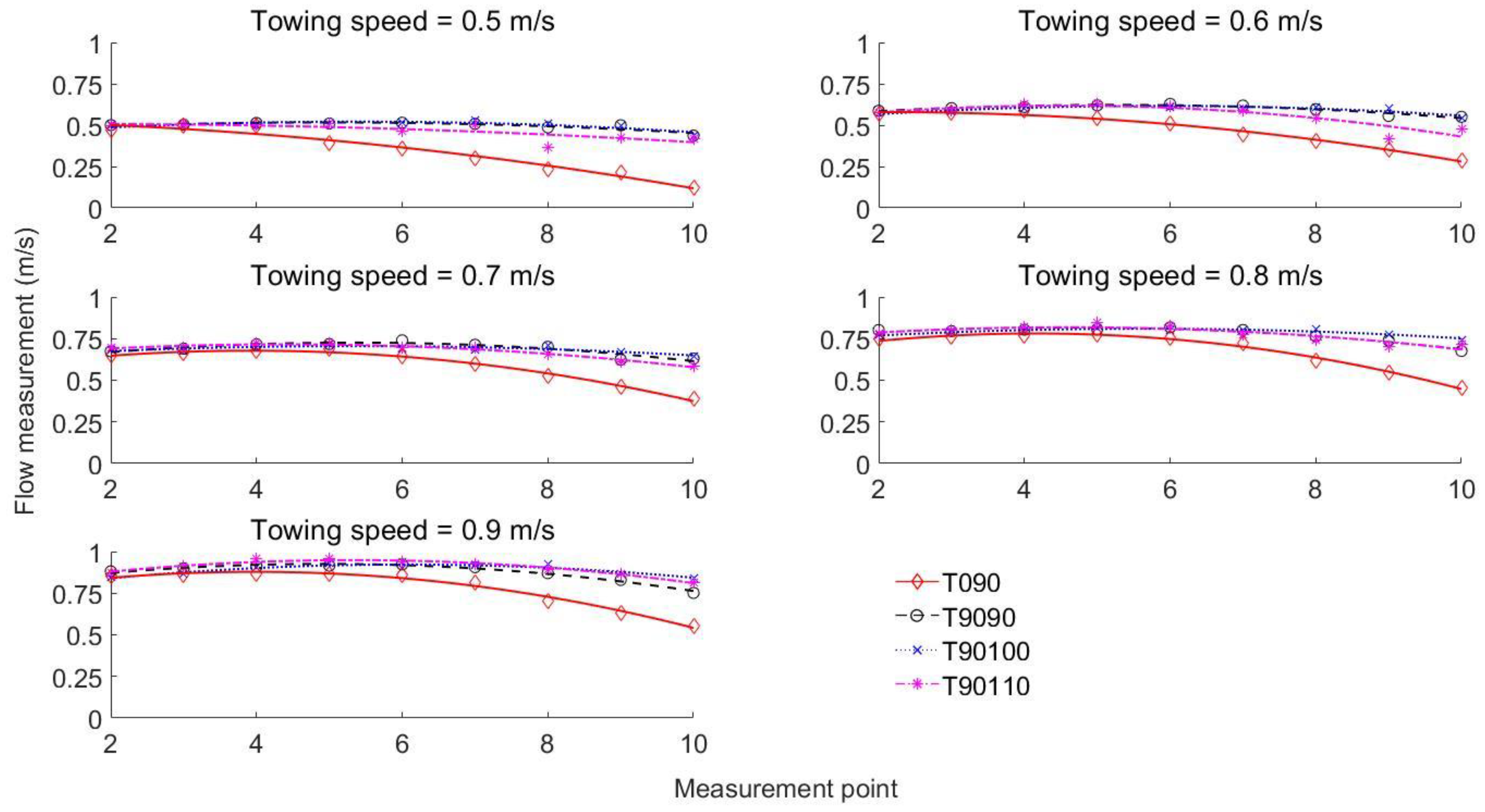
3.2.1. Flow Velocity
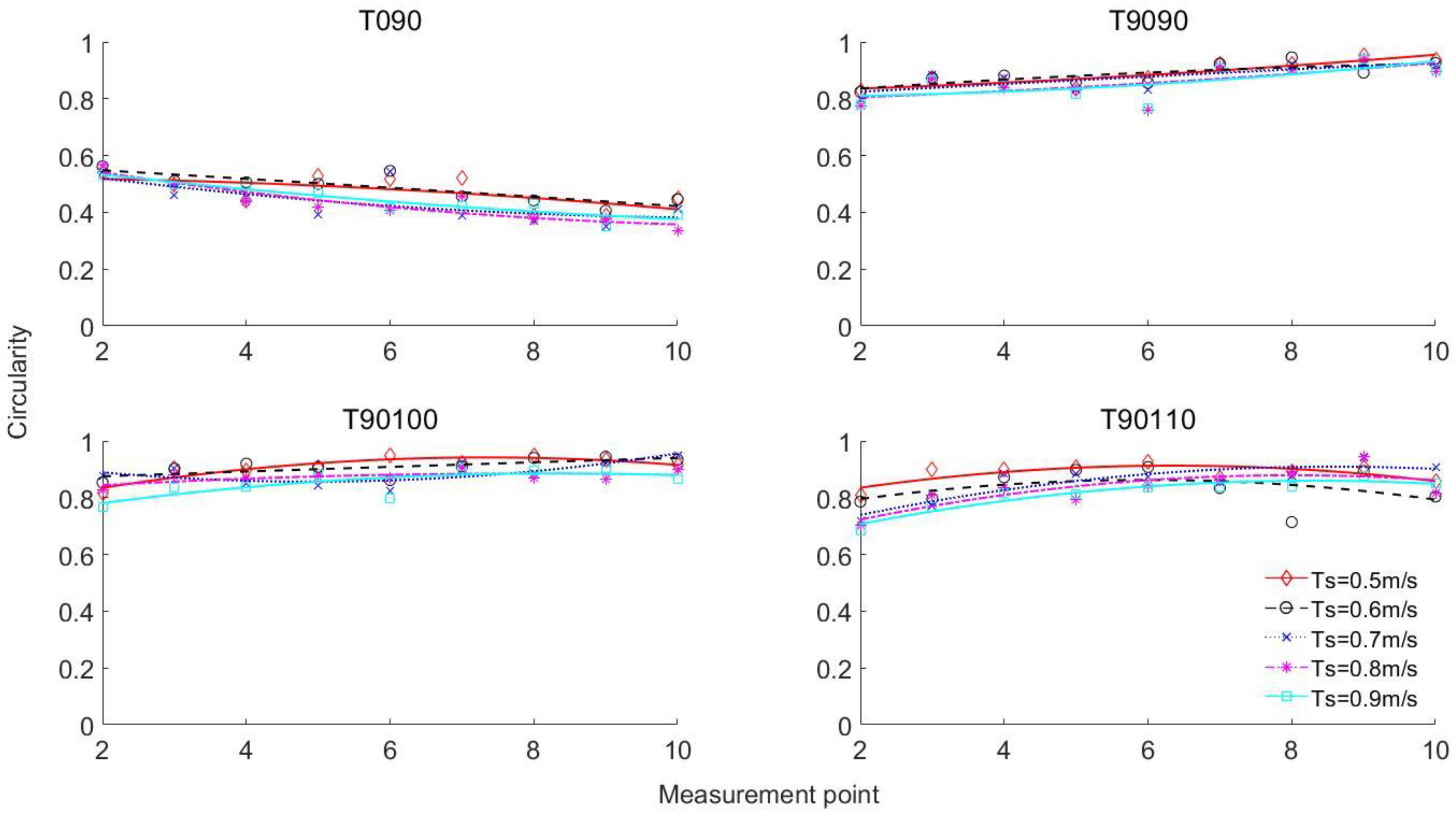
3.2.2. Mesh Circularity
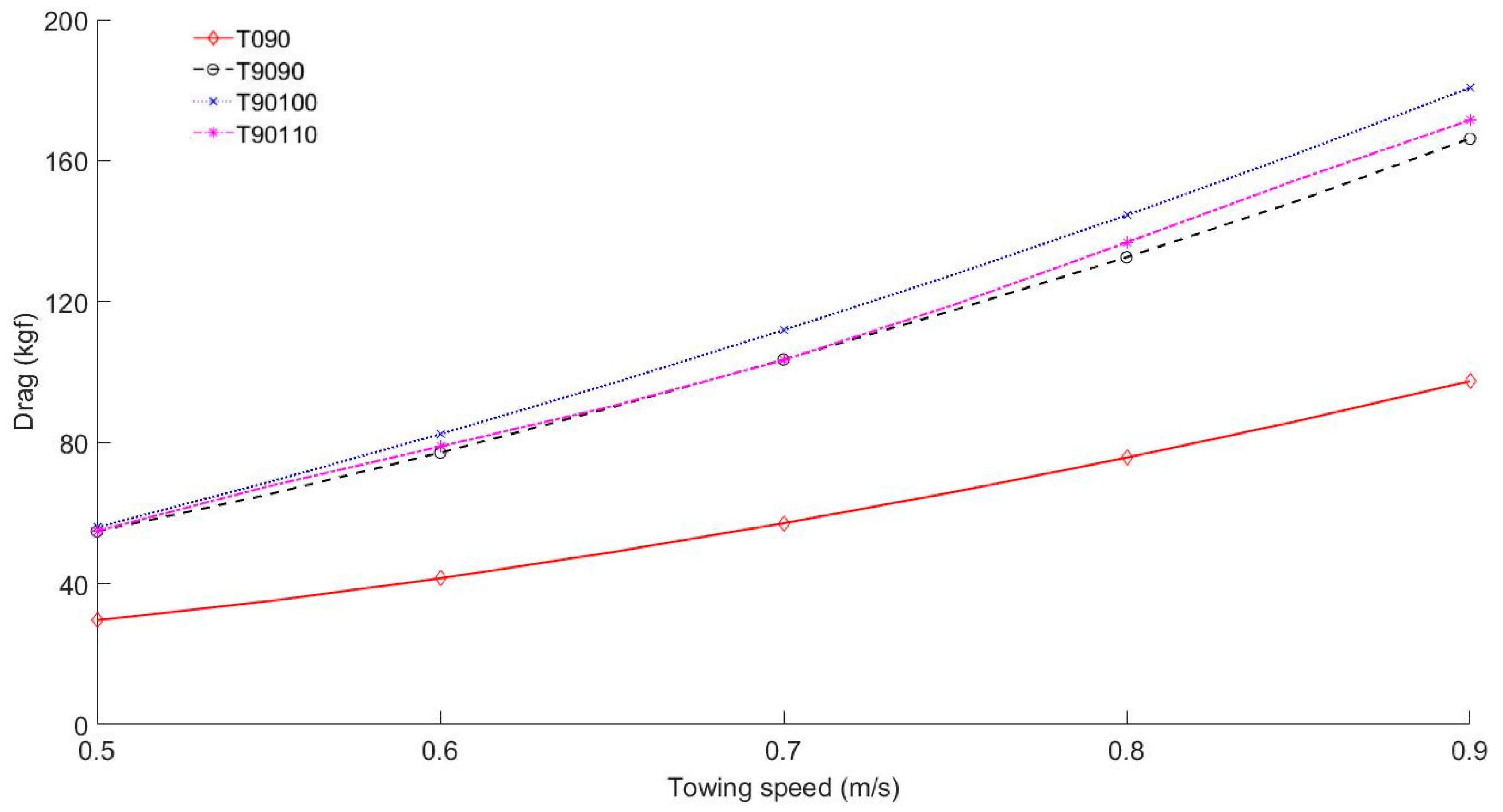
3.2.3. Drag
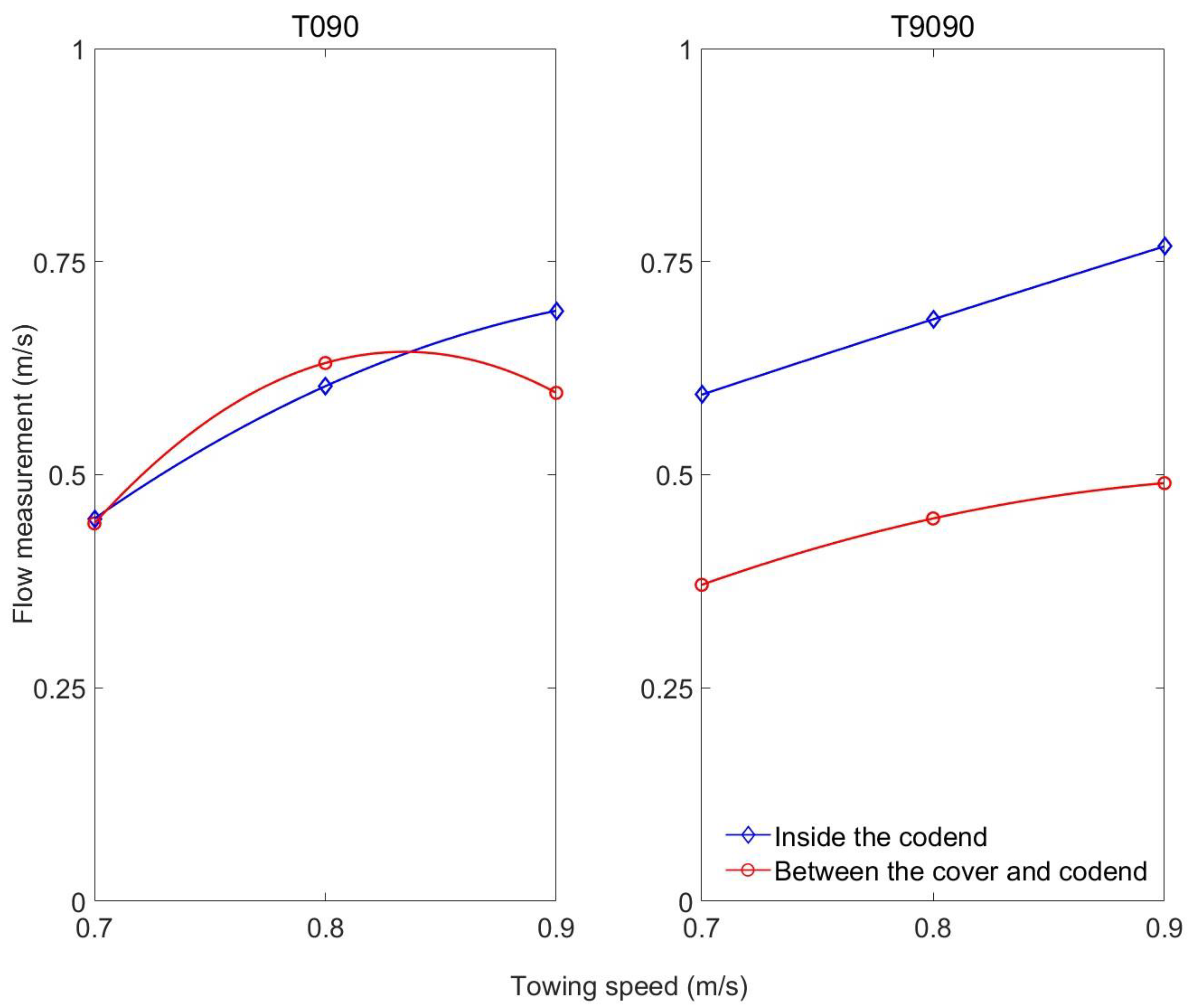
3.3. Codend Hydrodynamics with a Cover
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wileman, D.A.; Council, I. Manual of Methods of Measuring the Selectivity of Towed Fishing Gears; International Council For The Exploration of the Sea: Copenhagen, Denmark, 1996. [Google Scholar]
- He, P. Behavior of Marine Fishes: Capture Processes and Conservation Challenges; Wiley-Blackwell: Ames, Iowa, 2010. [Google Scholar]
- Breen, M.; Huse, I.; Ingolfsson, O.A.; Madsen, N.; Soldal, A.V. Survial: An Assessment of Mortality in Fish Escaping from Trawl Codends and Its Use in Fisheries Management; EU Final Report No. Project Q5RS-2002-01603 SURVIVAL; European Commission: Brussels, Belgium, 2007. [Google Scholar]
- Madsen, N.; Hansen, K.E.; Moth-Poulsen, T. The Kite Cover: A New Concept for Covered Codend Selectivity Studies. Fish. Res. 2001, 49, 219–226. [Google Scholar] [CrossRef]
- Madsen, N.; Holst, R. Assessment of the Cover Effect in Trawl Codend Selectivity Experiments. Fish. Res. 2002, 56, 289–301. [Google Scholar] [CrossRef]
- Pol, M.V.; Herrmann, B.; Rillahan, C.; He, P. Impact of Codend Mesh Sizes on Selectivity and Retention of Acadian Redfish Sebastes Fasciatus in the Gulf of Maine Trawl Fishery. Fish. Res. 2016, 184, 54–63. [Google Scholar] [CrossRef]
- Herrmann, B.; O’Neill, F.G. Theoretical Study of the Influence of Twine Thickness on Haddock Selectivity in Diamond Mesh Cod-Ends. Fish. Res. 2006, 80, 221–229. [Google Scholar] [CrossRef]
- Sala, A.; Lucchetti, A. Effect of Mesh Size and Codend Circumference on Selectivity in the Mediterranean Demersal Trawl Fisheries. Fish. Res. 2011, 110, 252–258. [Google Scholar] [CrossRef]
- Catchpole, T.L.; Revill, A.S.; Dunlin, G. An Assessment of the Swedish Grid and Square-Mesh Codend in the English (Farn Deeps) Nephrops Fishery. Fish. Res. 2006, 81, 118–125. [Google Scholar] [CrossRef]
- Hickey, W.M.; Boulos, D.L.; Brothers, G. A study of the influence of lastridge ropes on redfish selectivity in a bottom trawler. Can. J. Fish. Aquat. 1995, 2076, vii+25. [Google Scholar]
- Cheng, Z.; Einarsson, H.A.; Bayse, S.; Herrmann, B.; Winger, P. Comparing Size Selectivity of Traditional and Knotless Diamond-Mesh Codends in the Iceland Redfish (Sebastes Spp.) Fishery. Fish. Res. 2019, 216, 138–144. [Google Scholar] [CrossRef]
- O’Neill, F.G. Differential Equations Governing the Geometry of a Diamond Mesh Cod-End of a Trawl Net. J. Appl. Mech. 1997, 64, 7–14. [Google Scholar] [CrossRef]
- Herrmann, B.; Priour, D.; Krag, L.A. Simulation-Based Study of the Combined Effect on Cod-End Size Selection of Turning Meshes by 90° and Reducing the Number of Meshes in the Circumference for Round Fish. Fish. Res. 2007, 84, 222–232. [Google Scholar] [CrossRef] [Green Version]
- Bi, C.-W.; Zhao, Y.-P.; Dong, G.-H.; Xu, T.-J.; Gui, F.-K. Numerical Simulation of the Interaction between Flow and Flexible Nets. J. Fluids Struct. 2014, 45, 180–201. [Google Scholar] [CrossRef]
- Herrmann, B.; Krag, L.A.; Frandsen, R.P.; Madsen, N.; Lundgren, B.; Stæhr, K.-J. Prediction of Selectivity from Morphological Conditions: Methodology and a Case Study on Cod (Gadus morhua). Fish. Res. 2009, 97, 59–71. [Google Scholar] [CrossRef]
- He, P. Selectivity of Large Mesh Trawl Codends in the Gulf of Maine. Fish. Res. 2007, 83, 44–59. [Google Scholar] [CrossRef]
- Bayse, S.M.; Herrmann, B.; Lenoir, H.; Depestele, J.; Polet, H.; Vanderperren, E.; Verschueren, B. Could a T90 Mesh Codend Improve Selectivity in the Belgian Beam Trawl Fishery? Fish. Res. 2016, 174, 201–209. [Google Scholar] [CrossRef]
- Ferro, R.S.T.; O’Neill, F.G. An overview of the characteristics of twines and netting that may change codend selectivity. ICES CM 1994, 1994, 35. [Google Scholar]
- Herrmann, B.; Moderhak, W.; Wienbeck, H.; Valentinsson, D.; Priour, D.; Sala, F.A. Report of the Study Group on Turned 90° Codend Selectivity, Focusing on Baltic Cod Selectivity (SGTCOD); FTC:05; ICES C.M.: Hirtshals, Denmark, 2009. [Google Scholar]
- O’Neill, F.G.; Mutch, K. Selectivity in trawl fishing gears. Scott. Mar. Freshw. Sci. 2017, 8, 1–85. [Google Scholar]
- Druault, P.; Germain, G. Analysis of Hydrodynamics of a Moving Trawl Codend and Its Fluttering Motions in Flume Tank. Eur. J. Mech. B Fluids 2016, 60, 219–229. [Google Scholar] [CrossRef] [Green Version]
- Germain, G.; Facq, J.V.; Priour, D. Flow Characterization around A Cod-End. In Proceedings of the IMAM 2005, Lisboa, Portugal, 26–30 September 2005. [Google Scholar]
- He, P. Swimming speeds of marine fish in relation to fishing gears. ICES Mar. Sci. Symp. 1993, 196, 183–189. [Google Scholar]
- Martyshevskii, V.N.; Korotkov, V.N. Fish Behavior in the Area of the Trawl, as Studied by Bathyplane. FAO Fish. Aquac. Rep. (FAO) 1969, 62, 781–791. [Google Scholar]
- Main, J.; Sangster, G.I. TUV II—A Towed Wet Submersible for Use in Fishing Gear Research. Scottish Fish. Res. Rep. 1983, 29, 1983. [Google Scholar]
- Winger, P.D.; DeLouche, H.; Legge, G. Designing and Testing New Fishing Gears: The Value of a Flume Tank. Mar. Technol. Soc. J. 2006, 40, 44–49. [Google Scholar] [CrossRef]
- Winger, P.D. History of fisheries flume tanks around the world. J. Ocean Technol. 2021, 16, 108–109. [Google Scholar]
- Bouhoubeiny, E.; Germain, G.; Druault, P. Time-resolved PIV investigations of the flow field around cod-end net structures. Fish. Res. 2011, 108, 344–355. [Google Scholar] [CrossRef] [Green Version]
- Madsen, N.; Hansen, K.; Madsen, N.A. Behavior of different trawl codend concepts. Ocean Eng. 2015, 108, 571–577. [Google Scholar] [CrossRef]
- Moderhak, W. Some problems of water flow through trawl codend. ICES Counc. Meet. Pap. B 1993, 11, 1–6. [Google Scholar]
- Wienbeck, H.; Herrmann, B.; Moderhak, W.; Stepputtis, D. Effect of netting direction and number of meshes around on size selection in the codend for Baltic cod (Gadus morhua). Fish. Res. 2011, 109, 80–88. [Google Scholar] [CrossRef]
- Einarsson, H.A.; Cheng, Z.; Bayse, S.M.; Herrmann, B.; Winger, P.D. Comparing the Size Selectivity of a Novel T90 Mesh Codend to Two Conventional Codends in the Northern Shrimp (Pandalus borealis) Trawl Fishery. Aquac. Fish. 2021, 6, 382–392. [Google Scholar] [CrossRef]
- Hansen, U.J. Performance of a trawl codend made from 90° turned netting (T90) compared with that of traditional codends. In Proceedings of the ICES Fishing Technology and Fish Behaviour Working Group Meeting, Gdynia, Poland, 20–23 April 2004. [Google Scholar]
- Pichot, G.; Germain, G.; Priour, D. On the Experimental Study of the Flow around a Fishing Net. Eur. J. Mech. B Fluids 2009, 28, 103–116. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Z.; Winger, P.D.; Bayse, S.M.; Kebede, G.E.; DeLouche, H.; Einarsson, H.A.; Pol, M.V.; Kelly, D.; Walsh, S.J. Out with the Old and in with the New: T90 Codends Improve Size Selectivity in the Canadian Redfish (Sebastes mentella) Trawl Fishery. Can. J. Fish. Aquat. 2020, 77, 1711–1720. [Google Scholar] [CrossRef]
- Fonteyne, R. Protocol for the Use of an Objective Mesh Gauge for Scientific Purposes; (No. 279); International Council for the Exploration of the Sea: Oostende, Belgium, 2005. [Google Scholar]
- Kebede, G.E.; Winger, P.D. A Comparison of Hydrodynamic Forces in Knotted and Knotless Netting, Using Both Helix and Conventional Ropes for Midwater Trawls. Aquac. Fish. 2021, 6, 96–105. [Google Scholar] [CrossRef]
- Ferreira, T.; Rasband, W. ImageJ User Guide; 2012; pp. 155–161. Available online: https://imagej.nih.gov/ij/docs/guide/user-guide.pdf (accessed on 10 September 2020).
- Grimaldo, E.; Larsen, R.B.; Sistiaga, M.; Madsen, N.; Breen, M. Selectivity and Escape Percentages during Three Phases of the Towing Process for Codends Fitted with Different Selection Systems. Fish. Res. 2009, 95, 198–205. [Google Scholar] [CrossRef]
- Geher, G.; Hall, S. Straightforward Statistics: Understanding the Tools of Research; Oxford University Press: Oxford, UK; New York, NY, USA, 2014. [Google Scholar]
- Wakeford, J. An investigation into the influence of the Super-shooted TED and several types of bycatch reduction devices on water flow through a prawn trawl codend. In Assessment and Improvement of TEDs and BRDs in the NPF: A Co-Operative Approach Be Fishers, Scientists, Fisheries Technologists, Economists and Conservationists; Final Report on FRDC Project 2000/173; CSIRO: Cleveland, OH, USA, 2004; p. 412. [Google Scholar]
- O’Neill, F.G.; Knudsen, L.H.; Wileman, D.A.; McKay, S.J. Cod-End Drag as a Function of Catch Size and Towing Speed. Fish. Res. 2005, 72, 163–171. [Google Scholar] [CrossRef]
- MacLennan, D.N. Fishing Gear Selectivity: An Overview. Fish. Res. 1992, 13, 201–204. [Google Scholar] [CrossRef]
- Sistiaga, M.; Herrmann, B.; Nielsen, K.N.; Larsen, R.B. Understanding Limits to Cod and Haddock Separation Using Size Selectivity in a Multispecies Trawl Fishery: An Application of FISHSELECT. Can. J. Fish. Aquat. 2011, 68, 927. [Google Scholar] [CrossRef]
- Herrmann, B.; Sistiaga, M.; Nielsen, K.N.; Larsen, R.B. Understanding the Size Selectivity of Redfish (Sebastes spp.) in North Atlantic Trawl Codends. J. Northwest Atl. Fish. Sci. 2012, 44, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Krag, L.A.; Herrmann, B.; Iversen, S.A.; Engås, A.; Nordrum, S.; Krafft, B.A. Size Selection of Antarctic Krill (Euphausia superba) in Trawls. PLoS ONE 2014, 9, e102168. [Google Scholar] [CrossRef] [Green Version]
- Tosunoğlu, Z.; Özbilgin, Y.D.; Özbilgin, H. Body Shape and Trawl Cod End Selectivity for Nine Commercial Fish Species. J. Mar. Biol. Assoc. UK 2003, 83, 1309–1313. [Google Scholar] [CrossRef]
- Stergiou, K.I.; Karpouzi, V.S. Length–Girth Relationships for Several Marine Fishes. Fish. Res. 2003, 60, 161–168. [Google Scholar] [CrossRef]
- Broadhurst, M.K.; Dijkstra, K.K.P.; Reid, D.D.; Gray, C.A. Utility of Morphological Data for Key Fish Species in Southeastern Australian Beach-Seine and Otter-Trawl Fisheries: Predicting Mesh Size and Configuration. N. Z. J. Mar. Freshw. Res. 2006, 40, 259–272. [Google Scholar] [CrossRef] [Green Version]
- Kebede, G.E.; Winger, P.D.; DeLouche, H.; Legge, G.; Cheng, Z.; Kelly, D.; Einarsson, H. Flume Tank Evaluation of the Hydrodynamic Lift and Drag of Helix Ropes Compared to Conventional Ropes used in Midwater Trawls. Ocean Eng. 2020, 195, 106674. [Google Scholar] [CrossRef]
- Winger, P.D.; Eayrs, S.; Glass, C.W. Fish behaviour near bottom trawls. In Behavior of Marine Fishes: Capture Processes and Conservation Challenges; Blackwell Publishing: Ames, Iowa, 2010; pp. 67–103. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Net | Nominal Mesh Size (mm) | Twine | Length (Number of Meshes) | Circumference (Number of Meshes) | Measured Mesh Size (mm) | |
|---|---|---|---|---|---|---|
| Codend | ||||||
| T0-90 | 90 | Magnet Yellow 2 × 4.6 mm | 99.5 | 116 | 95.0 (2.4) | |
| T90-90 | 90 | Magnet Yellow 2 × 4.6 mm | 120 | 76 | 93.6 (2.5) | |
| T90-100 | 100 | Magnet Yellow 2 × 4.6 mm | 109 | 76 | 104.6 (2.9) | |
| T90-110 | 110 | Magnet Yellow 2 × 4.6 mm | 99 | 76 | 110.7 (2.1) | |
| Extension | ||||||
| T0-90 | 110 | Magnet Yellow 2 × 4.6 mm | 72.5 | 96 | 112.3 (3.5) | |
| T90-90 | 110 | Magnet Yellow 2 × 4.6 mm | 91 | 79.5 | 110.0 (3.2) | |
| T90-100 | 110 | Magnet Yellow 2 × 4.6 mm | 91 | 85 | 114.2 (2.1) | |
| T90-110 | 110 | Magnet Yellow 2 × 4.6 mm | 91 | 87.9 | 112.0 (1.9) | |
| Variable | Coefficient | Standard Error | t-Statistic | p-Value |
|---|---|---|---|---|
| Intercept | −0.19 | 0.026 | −7.49 | <0.001 |
| Ts | 1.02 | 0.023 | 43.46 | <0.001 |
| Mp | 0.043 | 0.007 | 6.2 | <0.001 |
| Cd_T90-90 | 0.11 | 0.0094 | 12.2 | <0.001 |
| Cd_T90-100 | 0.12 | 0.0094 | 12.62 | <0.001 |
| Cd_T90-110 | 0.10 | 0.0094 | 11.11 | <0.001 |
| Mp2 | −0.0049 | 0.00057 | −8.61 | <0.001 |
| Variable | Coefficient | Standard Error | t-Statistic | p-Value |
|---|---|---|---|---|
| Intercept | 0.499 | 0.022 | 22.45 | <0.001 |
| Ts | −0.13 | 0.027 | −4.65 | <0.001 |
| Mp | 0.007 | 0.001 | 5.23 | <0.001 |
| Cd_T90-90 | 0.417 | 0.011 | 37.85 | <0.001 |
| Cd_T90-100 | 0.426 | 0.011 | 38.82 | <0.001 |
| Cd_T90-110 | 0.383 | 0.011 | 34.93 | <0.001 |
| GLM | ||||
|---|---|---|---|---|
| Variable | Coefficient | Standard Error | t-Statistic | p-Value |
| Intercept | −123.67 | 11.5 | −10.75 | <0.001 |
| Ts | 262.76 | 15.23 | 17.25 | <0.001 |
| Cd_T90-90 | 46.6 | 6.09 | 7.65 | <0.001 |
| Cd_T90-100 | 54.82 | 6.09 | 9.00 | <0.001 |
| Cd_T90-110 | 48.83 | 6.09 | 8.01 | <0.001 |
| GLM-T0-90 | ||||
|---|---|---|---|---|
| Variable | Coefficient | Standard Error | t-Statistic | p-Value |
| Intercept | −0.213 | 0.246 | −0.865 | 0.451 |
| Ts | 0.993 | 0.304 | 3.264 | 0.047 |
| Ma_B | −0.025 | 0.050 | −0.501 | 0.651 |
| Number of observations: 6, error degrees of freedom: 3, root-mean-squared error: 0.0608, R-squared: 0.784, adjusted R-squared: 0.64, F-statistic vs. constant model: 5.45, p-value = 0.1. | ||||
| GLM-T90-90 | ||||
| Variable | Coefficient | Standard Error | t-Statistic | p-Value |
| Intercept | 0.095 | 0.073 | 1.303 | 0.284 |
| Ts | 0.733 | 0.089 | 8.159 | 0.004 |
| Ma_B | −0.245 | 0.015 | −16.679 | <0.001 |
| Number of observations: 6, error degrees of freedom: 3, root-mean-squared error: 0.018, R-squared: 0.991, adjusted R-squared: 0.986, F-statistic vs. constant model: 172, p-value < 0.001. | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Z.; Winger, P.D.; Bayse, S.M.; Kelly, D. Hydrodynamic Performance of Full-Scale T0 and T90 Codends with and without a Codend Cover. J. Mar. Sci. Eng. 2022, 10, 440. https://doi.org/10.3390/jmse10030440
Cheng Z, Winger PD, Bayse SM, Kelly D. Hydrodynamic Performance of Full-Scale T0 and T90 Codends with and without a Codend Cover. Journal of Marine Science and Engineering. 2022; 10(3):440. https://doi.org/10.3390/jmse10030440
Chicago/Turabian StyleCheng, Zhaohai, Paul D. Winger, Shannon M. Bayse, and David Kelly. 2022. "Hydrodynamic Performance of Full-Scale T0 and T90 Codends with and without a Codend Cover" Journal of Marine Science and Engineering 10, no. 3: 440. https://doi.org/10.3390/jmse10030440