
Neural Network Non-Singular Terminal Sliding Mode Control for Target Tracking of Underactuated Underwater Robots with Prescribed Performance


Abstract
:1. Introduction
2. Problem
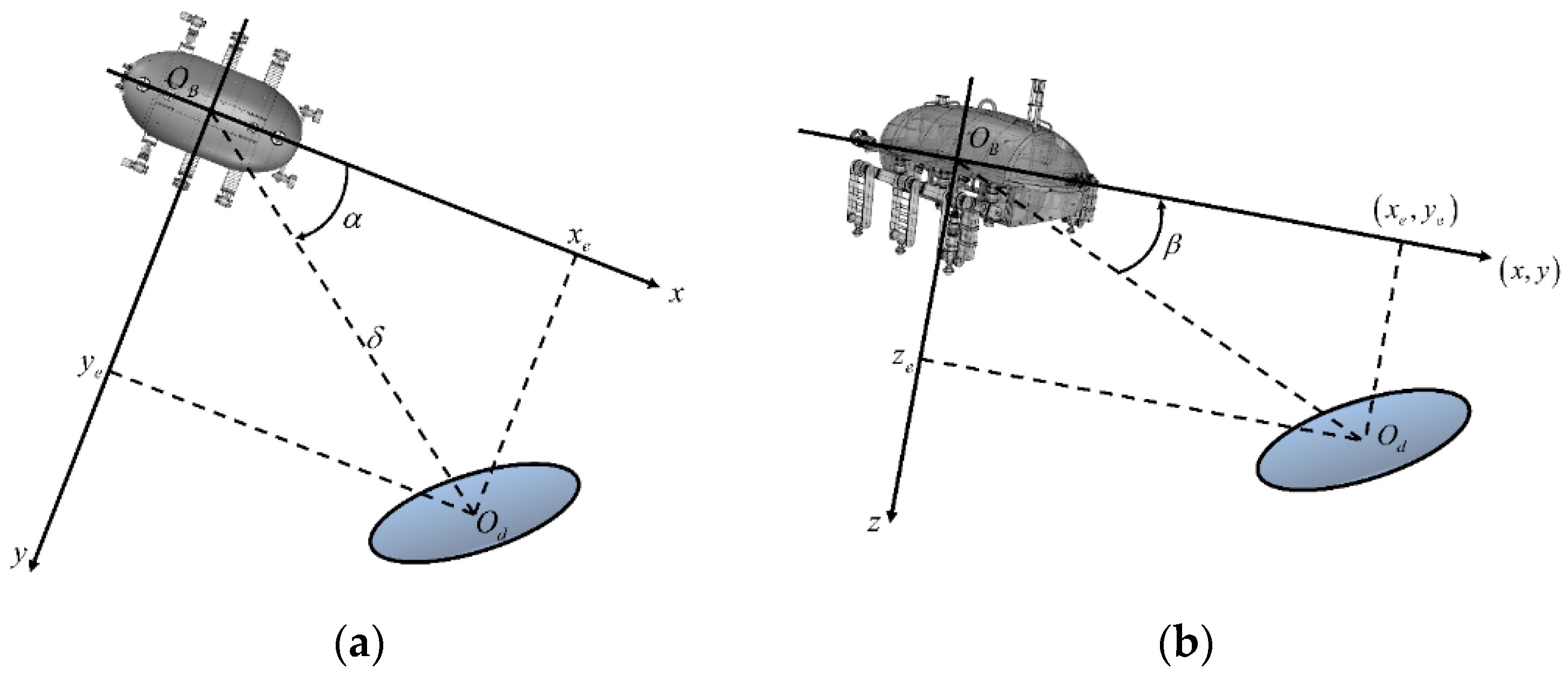
2.1. Underwater Robot Model
2.2. Control Objectives
3. Controller Design
3.1. Prescribed Performance and Error Transformation
3.2. Dynamic Controller Design
- 1.
- and , if and only if , ;
- 2.
- is the initial value at , , .
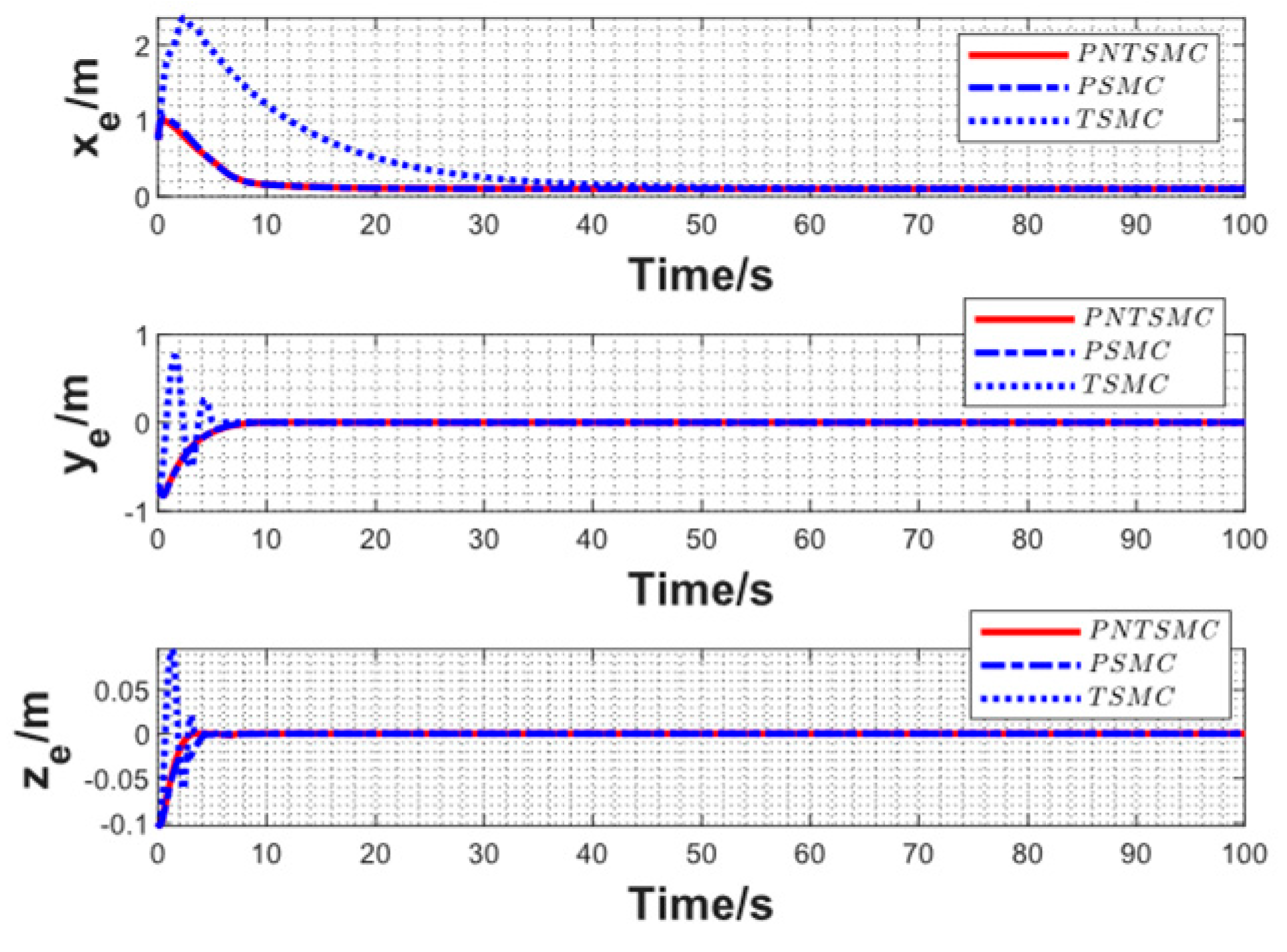
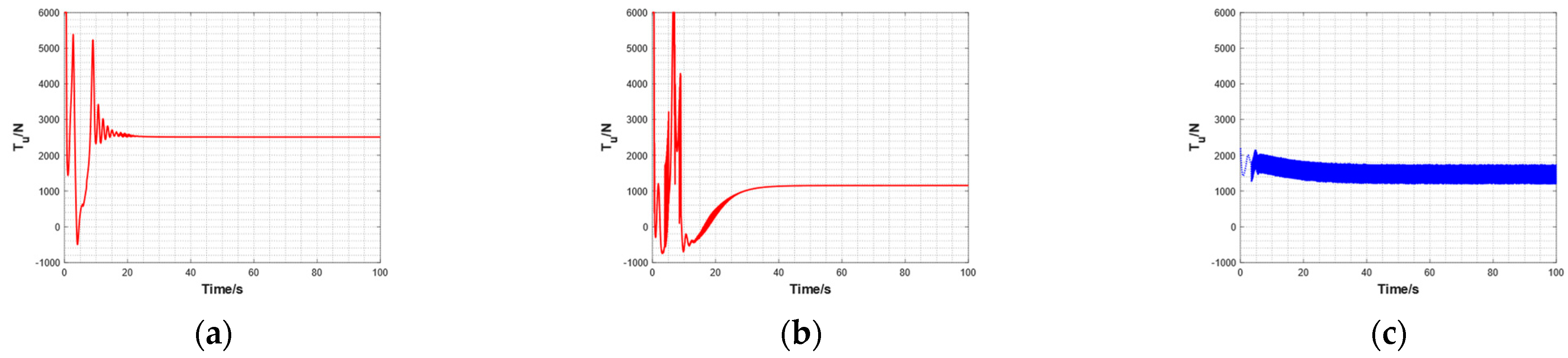
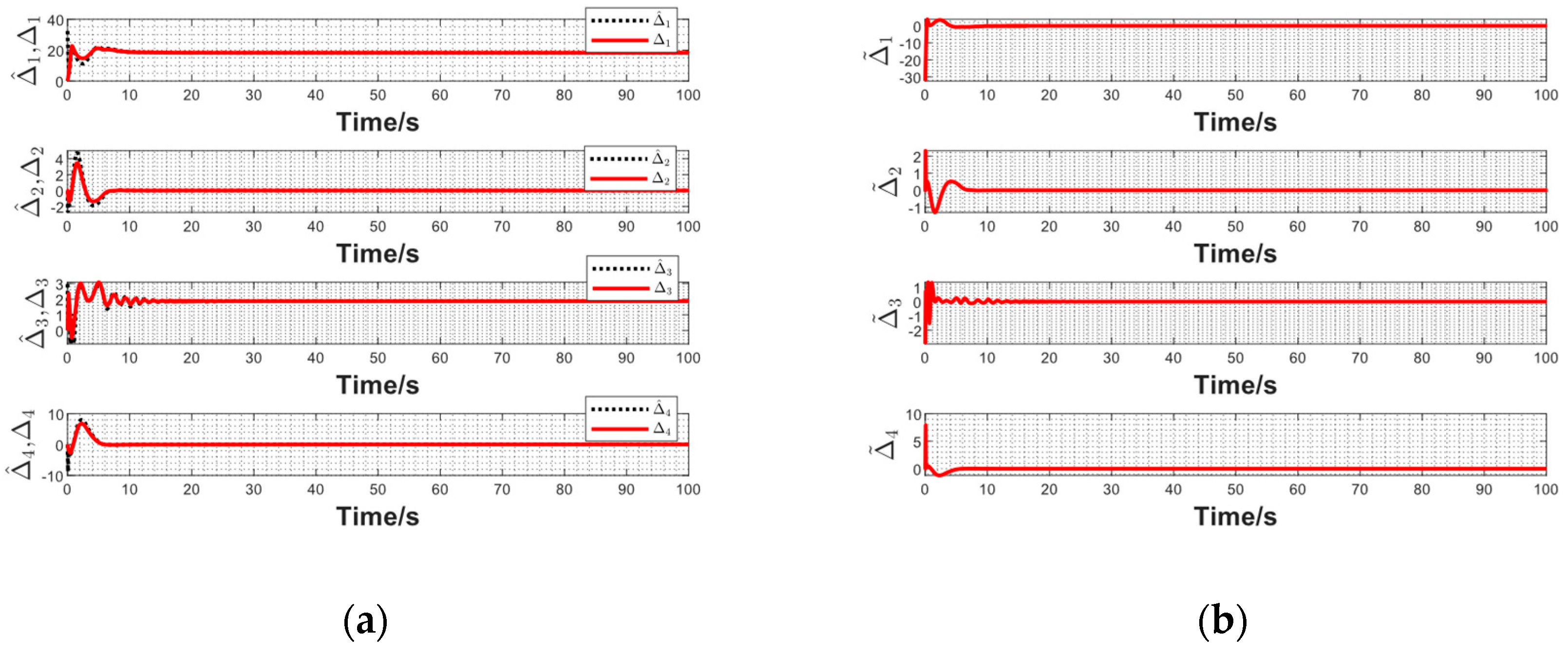
4. Numerical Simulation Example
5. Conclusions
- A hardware implementation of the proposed controller will be realized in a practical robot control system, and the possible concentration degree in the actual deployment would be discussed. Non-singular terminal sliding mode control and RBF neural networks have been used on a variety of platforms, and the prescribed performance technique only adds some logarithmic operations. In mainstream embedded computers, the computational load of the controller proposed in this paper is affordable. We will put this controller to the test in a computer with Intel® Atom™ N455 as the core.
- When there is a large deviation in the tracking error, or when the underwater robot encounters a large disturbance, the prescribed performance technique may produce singular values. It is necessary to adaptively adjust the relevant parameters according to the real environment. At the same time, a finite-time performance function will be considered to improve the control performance.
- After comparing with PTSMC and TSMC, the method proposed in this paper should also be compared with other state-of-the-art positioning error and tracking error methods. This is one of the directions for further extending and improving the proposed controller.
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
References
- Muthugala, M.A.V.J.; Samarakoon, S.M.B.P.; Elara, M.R. Toward energy-efficient online Complete Coverage Path Planning of a ship hull maintenance robot based on Glasius Bio-inspired Neural Network. Expert Syst. Appl. 2022, 187, 115940. [Google Scholar] [CrossRef]
- Chi, X.; Zhan, Q. Design and Modelling of an Amphibious Spherical Robot Attached with Assistant Fins. Appl. Sci. 2021, 11, 3739. [Google Scholar] [CrossRef]
- Song, C.; Cui, W. Review of Underwater Ship Hull Cleaning Technologies. J. Mar. Sci. Appl. 2020, 19, 415–429. [Google Scholar] [CrossRef]
- Yu, C.; Xiang, X.; Wilson, P.A.; Zhang, Q. Guidance-Error-Based Robust Fuzzy Adaptive Control for Bottom Following of a Flight-Style AUV With Saturated Actuator Dynamics. IEEE Trans. Cybern. 2020, 50, 1887–1899. [Google Scholar] [CrossRef] [PubMed]
- Tran, H.N.; Pham, T.N.N.; Choi, S.H. Robust depth control of a hybrid autonomous underwater vehicle with propeller torque’s effect and model uncertainty. Ocean Eng. 2021, 220, 108257. [Google Scholar] [CrossRef]
- Cho, G.R.; Li, J.H.; Park, D.; Jung, J.H. Robust trajectory tracking of autonomous underwater vehicles using back-stepping control and time delay estimation. Ocean Eng. 2020, 201, 107131. [Google Scholar] [CrossRef]
- Yan, Z.; Gong, P.; Zhang, W.; Wu, W. Model predictive control of autonomous underwater vehicles for trajectory tracking with external disturbances. Ocean Eng. 2020, 217, 107884. [Google Scholar] [CrossRef]
- Gan, W.; Zhu, D.; Ji, D. QPSO-model predictive control-based approach to dynamic trajectory tracking control for unmanned underwater vehicles. Ocean Eng. 2018, 158, 208–220. [Google Scholar] [CrossRef]
- Che, G.; Yu, Z. Neural-network estimators based fault-tolerant tracking control for AUV via ADP with rudders faults and ocean current disturbance. Neurocomputing 2020, 411, 442–454. [Google Scholar] [CrossRef]
- Elhaki, O.; Shojaei, K. Neural network-based target tracking control of underactuated autonomous underwater vehicles with a prescribed performance. Ocean Eng. 2018, 167, 239–256. [Google Scholar] [CrossRef]
- Guo, J.; Li, D.; He, B. Intelligent Collaborative Navigation and Control for AUV Tracking. IEEE Trans. Ind. Inform. 2021, 17, 1732–1741. [Google Scholar] [CrossRef]
- Guo, Y.; Qin, H.; Xu, B.; Han, Y.; Fan, Q.Y.; Zhang, P. Composite learning adaptive sliding mode control for AUV target tracking. Neurocomputing 2019, 351, 180–186. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, M.; Xu, J. Global Adaptive Neural Network Control of Underactuated Autonomous Underwater Vehicles with Parametric Modeling Uncertainty. Asian J. Control. 2019, 21, 1342–1354. [Google Scholar] [CrossRef]
- Miao, J.; Wang, S.; Zhao, Z.; Li, Y.; Tomovic, M.M. Spatial curvilinear path following control of underactuated AUV with multiple uncertainties. ISA Trans. 2017, 67, 107–130. [Google Scholar] [CrossRef] [PubMed]
- Lamraoui, H.C.; Qidan, Z. Path following control of fully-actuated autonomous underwater vehicle in presence of fast-varying disturbances. Appl. Ocean Res. 2019, 86, 40–46. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, B.; Wang, L. Autonomous underwater vehicle depth control based on an improved active disturbance rejection controller. Int. J. Adv. Robot. Syst. 2019, 16, 172988141989153. [Google Scholar] [CrossRef]
- Ali, N.; Tawiah, I.; Zhang, W. Finite-time extended state observer based nonsingular fast terminal sliding mode control of autonomous underwater vehicles. Ocean Eng. 2020, 218, 108179. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles. Ocean. Eng. 2017, 129, 613–625. [Google Scholar] [CrossRef]
- Patre, B.M.; Londhe, P.S.; Waghmare, L.M.; Mohan, S. Disturbance estimator based non-singular fast fuzzy terminal sliding mode control of an autonomous underwater vehicle. Ocean Eng. 2018, 159, 372–387. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Y.; Guan, Z.; Zhang, Y. An Adaptive Sliding Mode Motion Control Method of Remote Operated Vehicle. IEEE Access 2021, 9, 22447–22454. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Y.; Guan, Z.; Zhang, Y. Improved line-of-sight trajectory tracking control of under-actuated AUV subjects to ocean currents and input saturation. Ocean Eng. 2019, 174, 14–30. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, M.; Xu, J. Robust adaptive sliding mode control of underactuated autonomous underwater vehicles with uncertain dynamics. Ocean Eng. 2019, 173, 802–809. [Google Scholar] [CrossRef]
- Mu, W.; Wang, Y.; Sun, H.; Liu, G. Double-Loop Sliding Mode Controller with An Ocean Current Observer for the Trajectory Tracking of ROV. J. Mar. Sci. Eng. 2021, 9, 1000. [Google Scholar] [CrossRef]
- Zhang, Z.; Yan, W.; Li, H. Distributed Optimal Control for Linear Multiagent Systems on General Digraphs. IEEE Trans. Autom. Control. 2021, 66, 322–328. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, H.; Yan, W. Fully Distributed Control of Linear Systems with Optimal Cost on Directed Topologies. IEEE Trans. Circuits Systems. II Express Briefs 2021, 68, 336–340. [Google Scholar] [CrossRef]
- Li, Z.; Liu, W.; Li, L.; Guo, L.; Zhang, W. Modeling and adaptive controlling of cable-drogue docking system for autonomous underwater vehicles. Int. J. Adapt. Control. Signal Processing 2021, 36, 354–372. [Google Scholar] [CrossRef]
- Wu, H.; Song, S.; You, K.; Wu, C. Depth Control of Model-Free AUVs via Reinforcement Learning. IEEE Trans. Syst. Man Cybern.-Syst. 2017, 49, 2499–2510. [Google Scholar] [CrossRef] [Green Version]
- Carlucho, I.; De Paula, M.; Wang, S.; Petillot, Y.; Acosta, G.G. Adaptive low-level control of autonomous underwater vehicles using deep reinforcement learning. Robot. Auton. Syst. 2018, 107, 71–86. [Google Scholar] [CrossRef] [Green Version]
- Anderlini, E.; Parker, G.G.; Thomas, G. Docking Control of an Autonomous Underwater Vehicle Using Reinforcement Learning. Appl. Sci. 2019, 9, 3456. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Zhang, C.; Zhang, G.; Xu, H.; Ran, X. Three-Dimensional Path Tracking Control of Autonomous Underwater Vehicle Based on Deep Reinforcement Learning. J. Mar. Sci. Eng. 2019, 7, 443. [Google Scholar] [CrossRef] [Green Version]
- Cao, J.; Sun, Y.; Zhang, G.; Jiao, W.; Wang, X.; Liu, Z. Target tracking control of underactuated autonomous underwater vehicle based on adaptive nonsingular terminal sliding mode control. Int. J. Adv. Robot. Syst. 2020, 17, 172988142091994. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust Adaptive Control of Feedback Linearizable MIMO Nonlinear Systems with Prescribed Performance. IEEE Trans. Autom. Control. 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Karras, G.C.; Heshmati-Alamdari, S.; Kyriakopoulos, K.J. Trajectory Tracking with Prescribed Performance for Underactuated Underwater Vehicles Under Model Uncertainties and External Disturbances. IEEE Trans. Control. Syst. Technol. 2017, 25, 429–440. [Google Scholar] [CrossRef]
- Liang, H.; Fu, Y.; Gao, J.; Cao, H. Finite-time velocity-observed based adaptive output-feedback trajectory tracking formation control for underactuated unmanned underwater vehicles with prescribed transient performance. Ocean Eng. 2021, 233, 109071. [Google Scholar] [CrossRef]
- Shojaei, K.; Chatraei, A. Robust platoon control of underactuated autonomous underwater vehicles subjected to nonlinearities, uncertainties and range and angle constraints. Appl. Ocean Res. 2021, 110, 102594. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Li, M.; Wang, D.; Fu, M. Adaptive fuzzy controller design for dynamic positioning ship integrating prescribed performance. Ocean. Eng. 2021, 219, 107956. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Hu, X. Robust adaptive prescribed performance control for dynamic positioning of ships under unknown disturbances and input constraints. Ocean Eng. 2020, 206, 107254. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Wang, W.; Huang, J.; Wen, C. Prescribed performance bound-based adaptive path-following control of uncertain nonholonomic mobile robots. Int. J. Adapt. Control Signal Processing 2017, 31, 805–822. [Google Scholar] [CrossRef]
- Park, J.; Sandberg, I.W. Universal Approximation Using Radial-Basis-Function Networks. Neural Comput. 1991, 3, 246–257. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller Function | Control Parameters |
| Non-singular terminal sliding mode function | , |
| , | |
| , | |
| , | |
| . | |
| Prescribed performance function | , , |
| . | |
| Error transformation function | , , . |
| RBF neural network function | , |
| , | |
| . |
| Quantitative Comparison | Control Scheme | ||||
| Steady-state error | PNTSMC | 0.0001 m | −1.6155 × 10−5° | 7.4915 × 10−5° | −1.8646 × 10−5 m |
| PTSMC | 0.0001 m | 7.2886 × 10−5° | 0.0012° | −7.355 × 10−6 m | |
| TSMC | 0.0030 m | 1.848 × 10−4° | 0.0019° | 1.6467 × 10−6 m | |
| Convergence Time | PNTSMC | 10.59 s | 4.351 s | 4.639 s | 2.625 s |
| PTSMC | 10.7 s | 4.146 s | 4.121 s | 3.951 s | |
| TSMC | 41.33 s | 3.18 s | 4.797 s | 3.246 s | |
| Root-mean-square error | PNTSMC | 0.1870 m | 0.3791° | 3.1786° | 0.0097 m |
| PTSMC | 0.1942 m | 0.4598° | 6.1865° | 0.0104 m | |
| TSMC | 0.6008 m | 0.5070° | 6.3648° | 0.0109 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, L.; Liu, W.; Li, L.; Lou, Y.; Wang, X.; Liu, Z. Neural Network Non-Singular Terminal Sliding Mode Control for Target Tracking of Underactuated Underwater Robots with Prescribed Performance. J. Mar. Sci. Eng. 2022, 10, 252. https://doi.org/10.3390/jmse10020252
Guo L, Liu W, Li L, Lou Y, Wang X, Liu Z. Neural Network Non-Singular Terminal Sliding Mode Control for Target Tracking of Underactuated Underwater Robots with Prescribed Performance. Journal of Marine Science and Engineering. 2022; 10(2):252. https://doi.org/10.3390/jmse10020252
Chicago/Turabian StyleGuo, Liwei, Weidong Liu, Le Li, Yichao Lou, Xinliang Wang, and Zhi Liu. 2022. "Neural Network Non-Singular Terminal Sliding Mode Control for Target Tracking of Underactuated Underwater Robots with Prescribed Performance" Journal of Marine Science and Engineering 10, no. 2: 252. https://doi.org/10.3390/jmse10020252