1. Introduction
In recent years, fault diagnosis of marine equipment has attracted many researchers. Fault diagnosis methods can be classified into model-based methods, signal-based methods, knowledge-based methods, hybrid methods, and active fault diagnosis methods [
1]. Xu et al. [
2] proposed a model-based fault detection and isolation scheme for the ship rudder servo system. This algorithm has the potential to perform fault diagnosis autonomously, so it can save time and human resources in sea travel. The experiment shows that four of the six faults can be isolated. The numerical simulation further shows that if the spool displacement sensor is added, all faults can be isolated. Zhong et al. [
3] proposed an intelligent fault fusion diagnosis method for marine diesel engines. The combination of D-S evidence theory and GA-SVM algorithm can solve the problem that the diagnosis model based on single sensor data is vulnerable to environmental noise and has low diagnosis accuracy. In addition, this information fusion method can also reduce the risk of overfitting of GA-SVM algorithm and improve its generalization ability. The author claims that the accuracy of the fault diagnosis model based on information fusion can reach 94.17%. Nguyen et al. [
4] proposed a new method to process MDIR data of vibration signals. The proposed MB-DNN has a higher classification accuracy and strong noise resistance, which can be used for the early detection of bearing faults. Hoang et al. [
5] improved the performance of the motor bearing fault diagnosis method based on the motor current signal by using deep learning and information fusion. Compared with the traditional motor bearing fault diagnosis method based on vibration signal sum, this method has the advantages of simple signal acquisition and lower cost, but poor performance. Maamouri et al. [
6] designed a hybrid model-based and signal-based method for fault diagnosis of sensorless speed-controlled induction motor drive (IM) and IGBT open circuit switch. Through various experiments, it is proved that this diagnosis method is efficient, simple, and independent of the transient state and parameters of the motor.
In many cases, researchers often cannot obtain sufficient data about the research object. Therefore, model-based fault diagnosis is necessary. Marine equipment operates in harsh environments, such as those with shock vibrations, high temperatures, and high pressures, which hide the risks of many kinds of failures. The ability to quickly detect and isolate faults is critical to ensuring the stable operation of machinery and equipment, and a multi-model (MM) fault diagnosis method can realize that objective [
7]. Under normal circumstances, the state transitions of a system follow certain physical principles, but when a fault occurs, the system state transition process also changes. For all possible situations, MM establishes corresponding state models, and the residuals obtained after filtering with each model are used as the basis for fault diagnosis. A smaller model residual illustrates a closer relationship between the model corresponding to the current situation and the situation itself.
The fault diagnosis method by MM is commonly used in slow-grow fault diagnosis, and researchers have applied this method to many fields. To simultaneously diagnose the gas path and sensor faults, Yang et al. [
8] proposed an MM method based on the chi-square test to effectively overcome the problem of misdiagnosis or missed diagnosis caused by fault coupling. The simulation results show that the proposed method has 97% and 94% accuracy in the detection and isolation of sensor fault and gas path fault under a single coupling fault. Zhao et al. [
9] proposed an MM method for aeroengine sensor fault diagnosis and estimation. By designing corresponding aeroengine Kalman filter banks and using a hierarchical architecture approach, sensor fault diagnosis can be effectively realized. He et al. [
10] proposed a fault diagnosis method for complex chemical process based on MM fusion. The simulation results on the Tennessee Eastman Process dataset and Fluidized Catalytic Cracker fractionation unit dataset show that this method has significant advantages over traditional diagnostic methods in terms of diagnostic precision and recall. Niu et al. [
11] studied the problem of fault diagnosis of launch vehicle actuators by using an MM method. The simulation results show that the method can quickly and accurately find rocket fault samples. Sidhu et al. built a state model for a lithium battery [
12], and diagnosed overcharge and over-discharge faults based on the conditional probabilities calculated by the filtering residuals. The experiment proved the effectiveness of the MM, but the conditional probability calculated during the diagnosis process fluctuated to a certain extent, which affects the evaluation effect. Pratama et al. applied an MM to fault diagnosis for a differential drive robot [
13], and the MM could accurately evaluate the states of the left and right rotors of the robot. Naderi et al. established a set of state models to diagnose the failures of a gas turbine [
14], such as turbine efficiency drops and compressor efficiency drops, evaluated the current state by the corresponding conditional probability, and proved that the selected unscented Kalman (UKF) had faster detection and isolation speeds than extended Kalman (EKF).
In recent years, many scholars have improved the MM method. To mitigate the problem that the number of state models that need to be established increases exponentially when the number of failures increases, Gao et al. believed that multiple faults occurred one after another and had a buffer time [
15]; thus, he proposed a satellite-like hierarchical structure, and the filter bank corresponding to the fault model was activated after a fault was isolated. Sadeghzadeh et al. used graph theory to decouple a robot navigation system into multiple subsystems and established state models for each subsystem [
16]. Experiments showed that this method not only reduces the number of models but also effectively isolates sensor faults, such as inertial sensors and camera sensors. To improve the problem that the diagnosis effect may be reduced due to insufficient state model accuracy, Zhu et al. used a kernel function instead of a state transition function to establish the state model [
17], and this method can detect typical actuator faults in real time. Yang et al. used a strong tracking EKF for filtering to ensure that the filtering residual obeyed a Gaussian distribution [
18], improving the robustness of the MM by reducing the speed of fault detection and isolation. Zhao et al. presented a method for estimating the severity of faults [
19]; experiments showed that as the degree of fault severity decreased, the required detection and isolation speeds also increased.
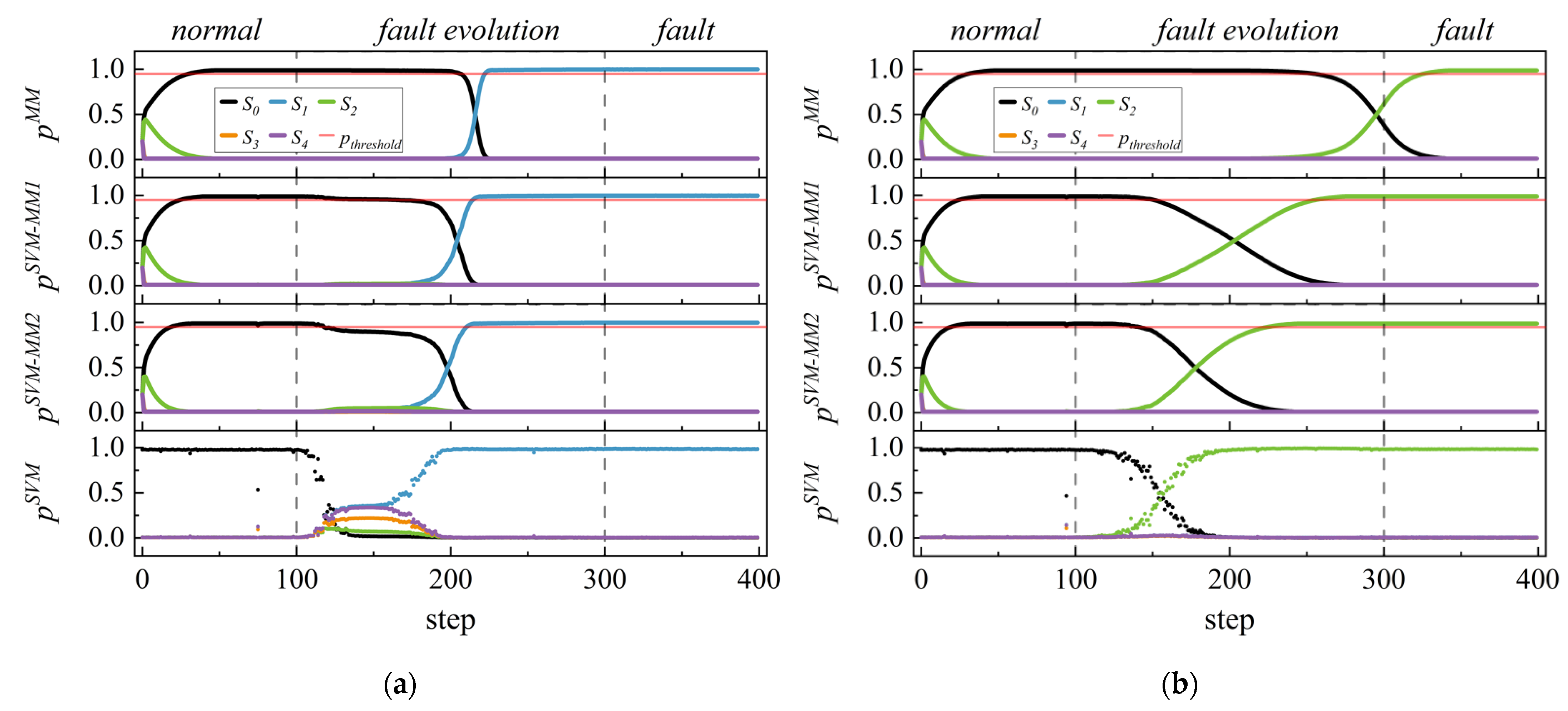
During the evolution processes of slowly changing faults, early fault diagnosis plays an important role in ensuring the stable operation of mechanical equipment, so it is of great significance to improve the detection and isolation speeds of MM fault diagnosis methods. However, few of the above methods improve the speed of MM diagnosing faults. In the early stage of fault evolution, due to the insignificant fluctuations of parameters or the characteristics of other faults, the speed and robustness of MM designed for fault diagnosis are reduced. Therefore, this article uses a support vector machine (SVM) to improve the performance of the MM method by fusing the posterior probability of the SVM and the conditional probability of the MM, thereby improving the detection and isolation speeds of the MM and enhancing its robustness. Finally, experiments with a marine plunger pump are carried out to verify the algorithm.
2. SVM-MM Algorithm Framework
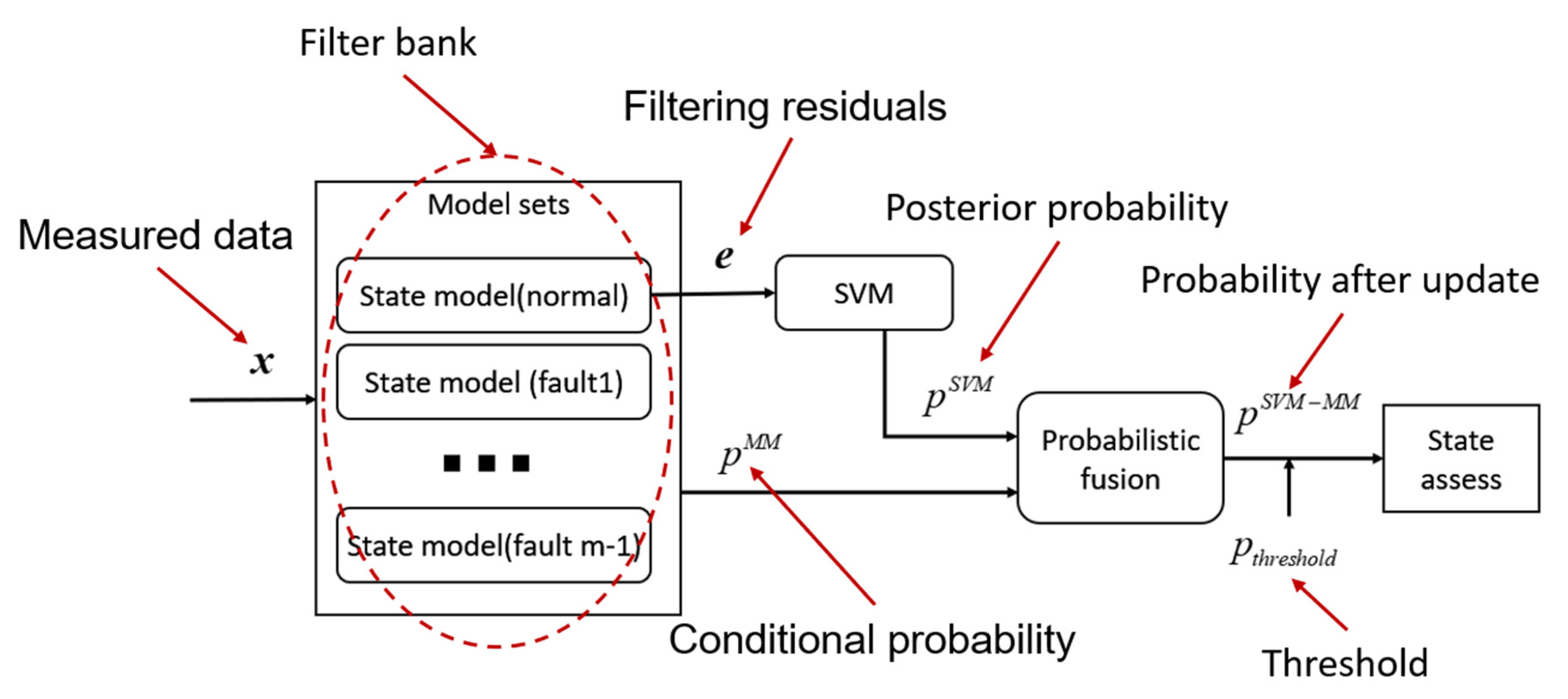
An MM calculates a conditional probability based on the residual of the state model, which takes measurement data as input. The conditional probability can be regarded as the occurrence probability of the state corresponding to the model. However, due to the state fluctuations of the system in the fault evolution stage, and the corresponding residuals are insignificant, the value of conditional probability increases delay, which affects the diagnosis speed of the MM. In this article, by exploiting the sensitivity of an SVM to data, the posterior probability of the SVM’s classification result is fused with the conditional probability of an MM, and fault diagnosis is performed according to the fused probability.
The difference between SVM-MM and the traditional multiple models lies in the calculation process of conditional probability. SVM-MM enhances MM’s ability to evaluate the current state by fusing the posterior probability of SVM. First, determine the potential operating state of the machine, and establish corresponding state models to form filter banks. Then, the currently measured data is used as the filter input, and the residual is calculated according to Equation (34). The conditional probability of MM is calculated by using the residual of each state model through Equation (5). The residual of the normal state model is used as the SVM input so that it can classify the current state and calculate the corresponding posterior probability according to Equation (11). Then, a new conditional probability is formed by fusing the posterior probability of SVM and the conditional probability of MM according to Equation (12). Finally, fault diagnosis and isolation are realized through Equation (13) according to the updated conditional probability and threshold, as shown in
Figure 1.
2.1. State Model
The dynamic characteristics of a mechanical system can be comprehensively and accurately described by using the parameter set
with the smallest number of parameters at any time, and
is called the state variable of the system. The relationship between this state variable and the state variable at the previous moment can be described as:
where
is the system state transition equation;
is the control input variable, which is the set of parameters that affect the state of the system;
is the system noise, including the error of the system state transition equation;
represents the time when
.
The output variable
of the system is generally selected as the set of parameters that can be observed by the system, and the relationship between it and state variable
at time
can be described as:
where
is the measurement conversion equation;
is the measurement noise, such as that from the sensor error;
represents the time when
.
The state model of the system can be described as a combination of Equations (1) and (2).
2.2. Conditional Probability of the MM
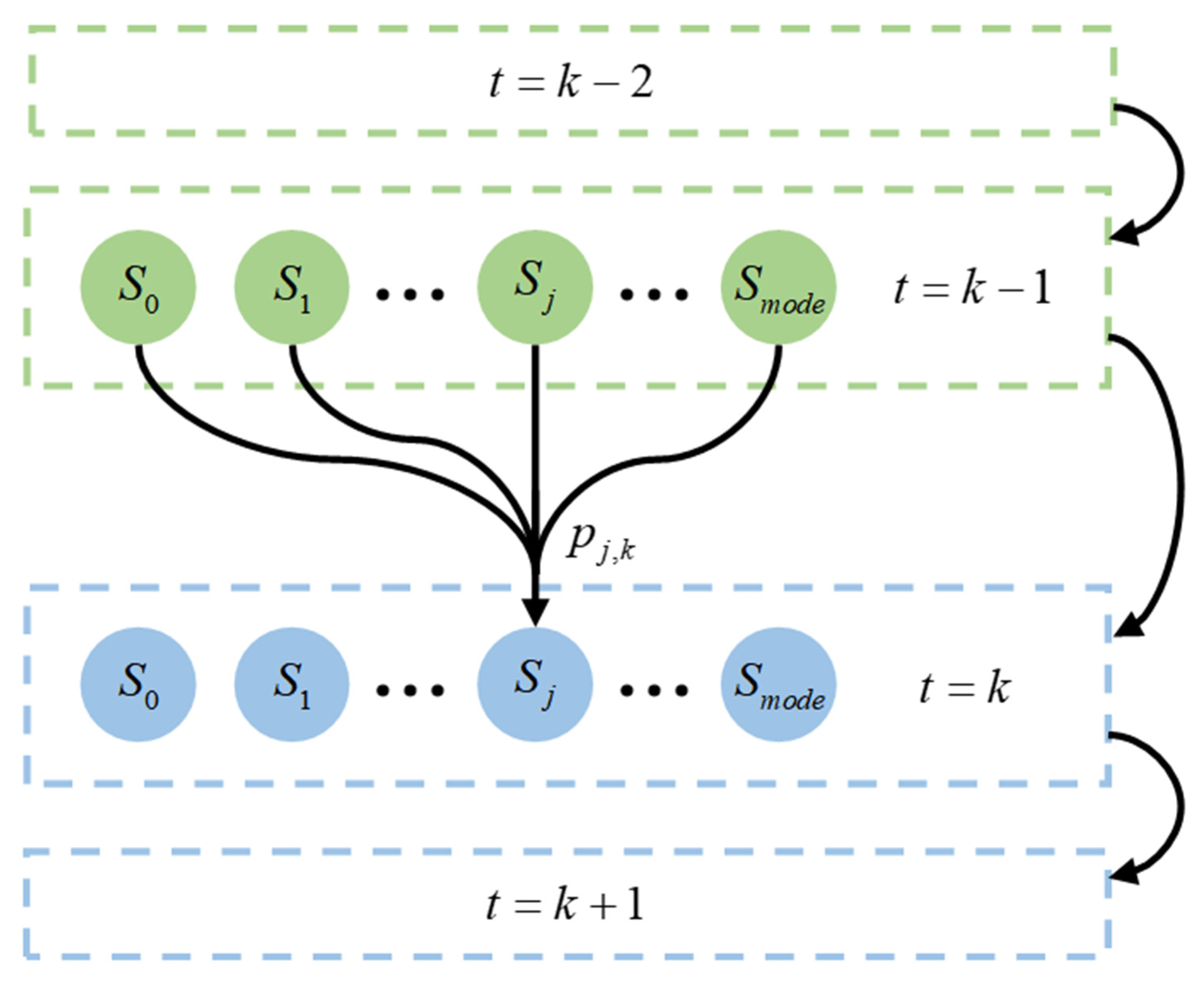
Suppose that the number of possible operating states for the mechanical system
is
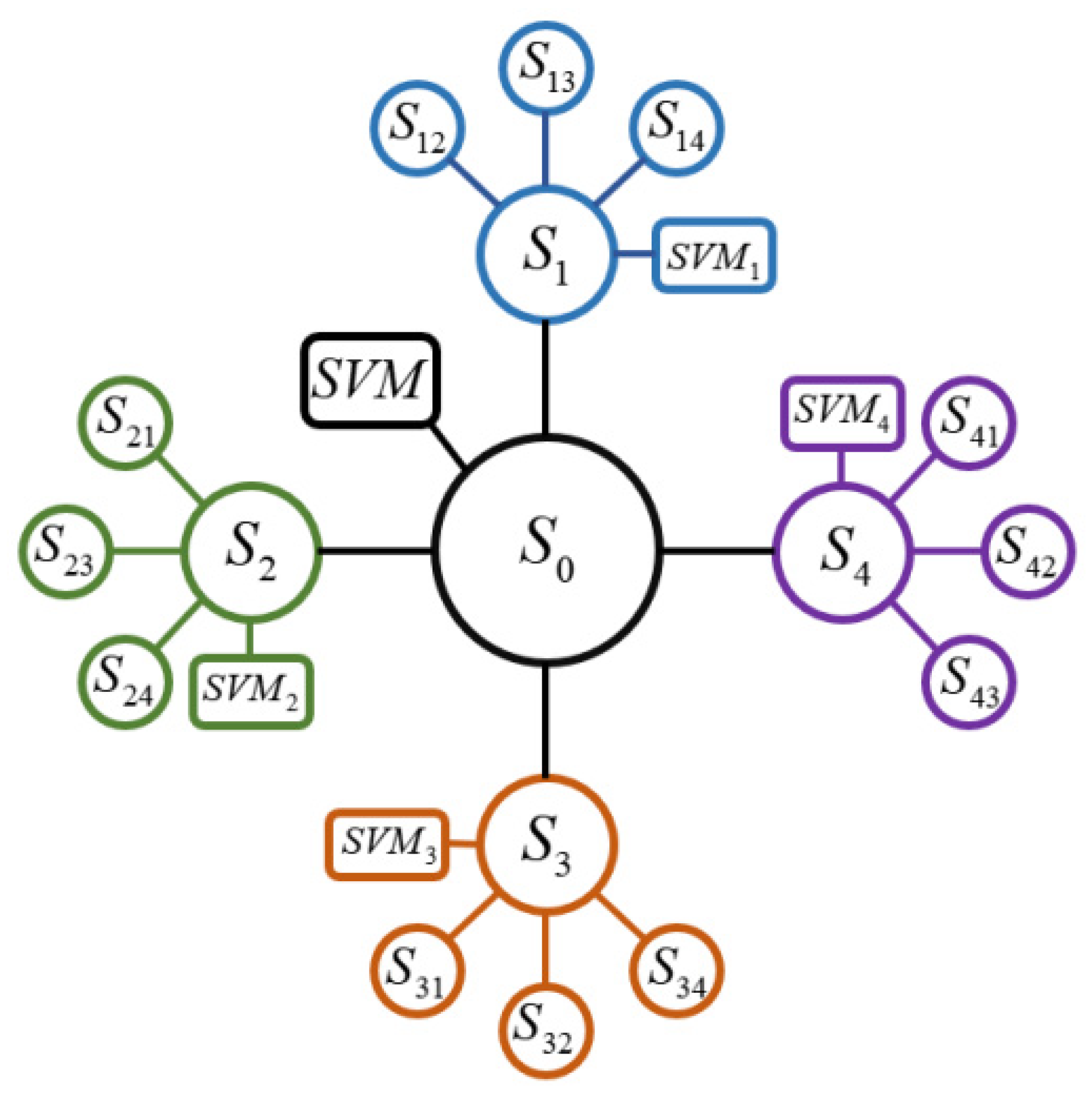
, and regard the mechanical system as a first-order Markov Chain; then, the time
is only related to the previous time
. Then, the running state of the plunger pump can be represented by Markov chain, as shown in
Figure 2. Combining the data measured at time
and the previous time, the conditional probability of being in state
at this time can be described as:
where
is the conditional probability of being in state
at time
;
is the
state with
;
is the set of historical measurement data at time
with
.
According to the residuals and covariances of the outputs of each model, the conditional probability density corresponding to each state at time
can be described as:
where
is the conditional probability density of being in state
;
and
are the residuals and covariances of the output variables, respectively (refer to the
Appendix A for the specific solution steps); and
is the dimensionality of the measurement data.
Combining Equations (3) and (4). according to Bayes’ theorem, the conditional probability corresponding to each state at time
is rewritten as:
where
is the conditional probability of being in state
at time
calculated by an MM. Considering that the mechanical system may undergo state transitions during operation, to ensure that the MM can be responded to in time, a minimum value is set for each probability (
).
The filtering residuals of each state model can be obtained from the set of state models established in advance with the currently measured data as input and then the conditional probability can be calculated according to Equation (5), which reflects the probability of the corresponding state. Because of the characteristics of the Bayesian theorem, the occurrence probability of these states is only related to the previous time, and at the same time, the sum of conditional probabilities of all models in the state model group is 1.
2.3. Posterior Probability of the SVM
The principle of the SVM is to find a hyperplane in the set space formed by multiple sets of data:
where
is the weight vector,
and
are hyperplane functions and sample functions, respectively;
denotes the sample data, and
is the threshold.
The goal is to satisfy the following optimization problem:
where
is the penalty function;
is the slack variable;
is the predictor for the sample.
Refer to Lagrange dual functions, the optimization problem can be described as:
where
is the Lagrange coefficient and
is the kernel function, which is selected as the Gaussian kernel function in this article.
Let
be the solution of Equation (8); then, the solutions of the threshold
and weight vector
can be described as:
Substituting Equation (9) into Equation (8), the discriminant classification function of the SVM can be described as:
During the process of fault diagnosis, the actual measurement data includes noise and outliers; the Kalman filter can reduce the influence of noise; and the characteristics of faults can be represented by the residuals from the normal state model, thus the residuals can be regarded as sample data with denoising and feature extraction. In this article, we use the residuals from the normal state model to train SVM, the posterior probability that the SVM classifies the current state as
can be described as [
19]:
where
is the posterior probability of classifying the input as being in state
at time
calculated by the SVM;
and
are the input and output of the SVM, respectively;
and
are the coefficients yielded by fitting and training.
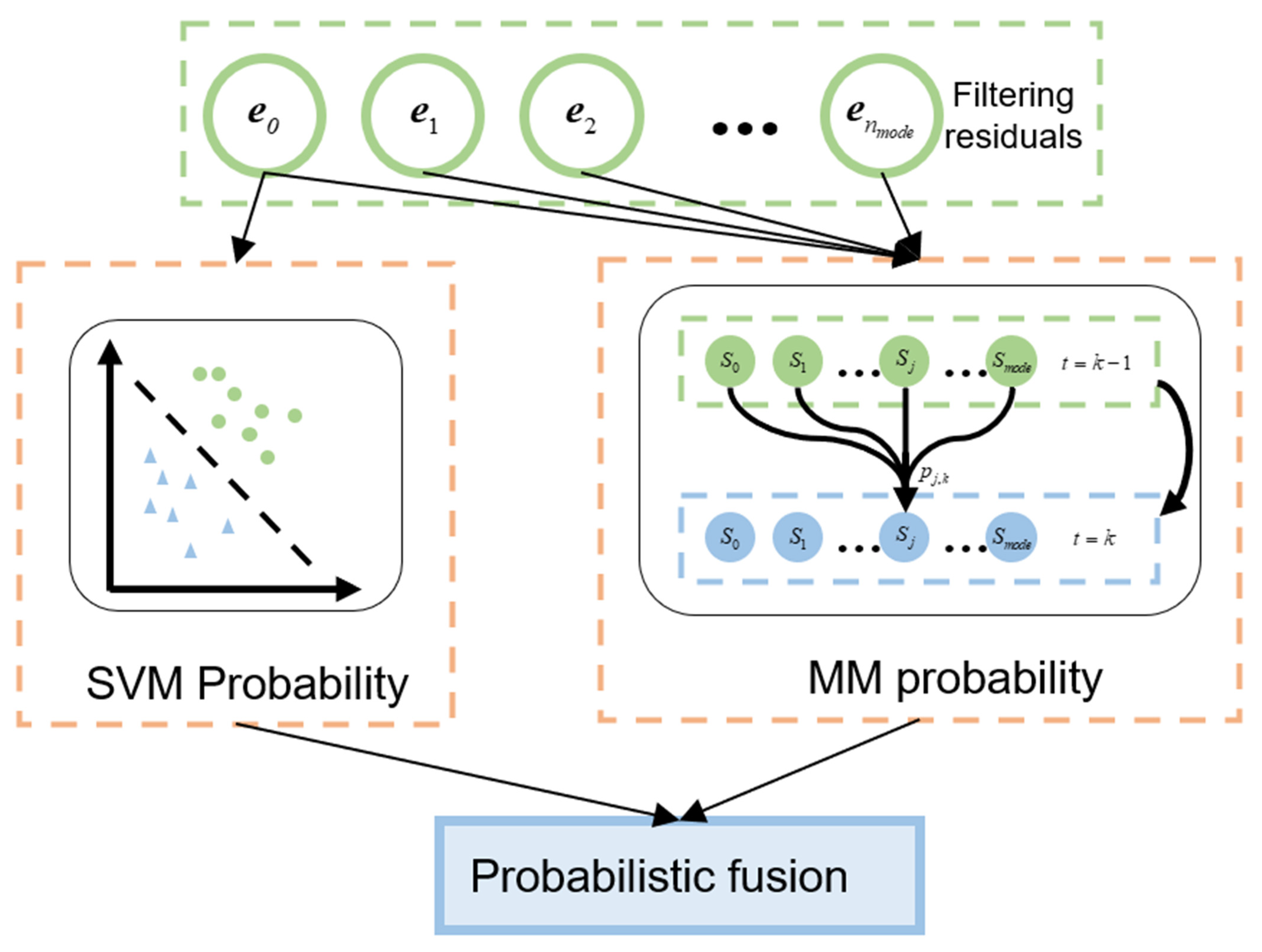
2.4. Probabilistic Fusion
The information from different sources can be integrated by probabilistic fusion, and the fused probability has the completeness and consistency of mathematics more confidently [
20]. In this article, the probability distribution of
and
are the same, so we can fusion the two probabilistic by referring to Bayesian melding, as shown in
Figure 3.
The common fusion methods are linear and logarithmic, we choose linear fusion [
21]:
where
is the weight factor for the conditional probabilities calculated by the MM. Due to this probability is related to historical measurement data, it has a certain robustness to abnormal inputs, while the posterior probability calculated by the SVM is only related to the current moment, so it should have a larger weight.
2.5. State Assessment
According to the conditional probability obtained after fusion, the current state can be evaluated in combination with the threshold:
where
means that the system is in state
at time
;
is a threshold. If the calculated probability exceeds the threshold, the corresponding state is considered to exist, and if the probability is lower than the threshold, the corresponding state is considered to not exist. The correction effect of SVM is inversely proportional to the threshold value. If the value is too small, the instability of SVM will be improved. If the value is too large, the correction effect is not obvious. In this article,
.
5. Conclusions
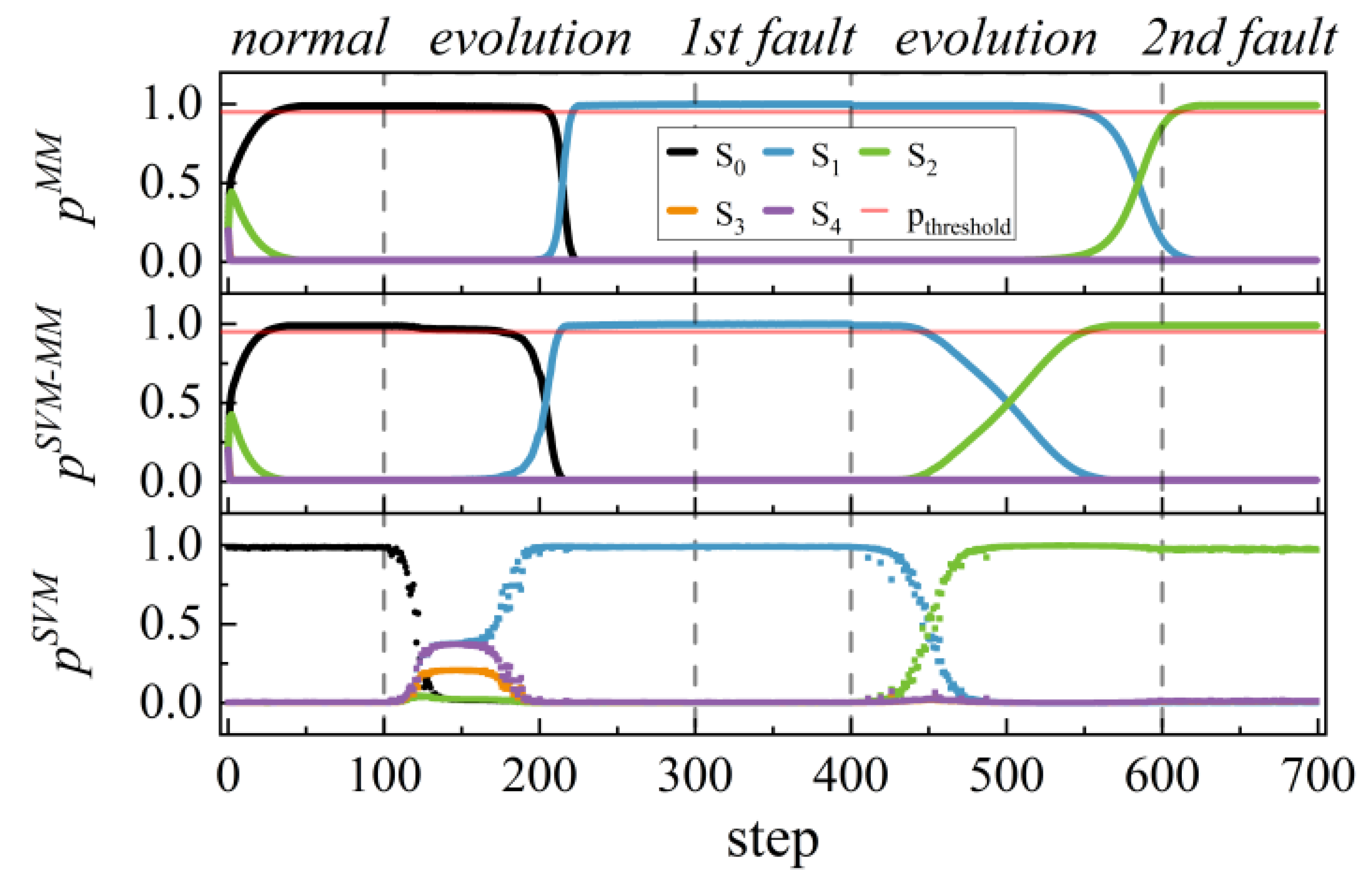
To mitigate the problem that MM has low detection and isolation speeds and unstable performance during fault evolutions, this article proposes a joint diagnosis method involving an MM and an SVM. The new method integrates the conditional probability of the MM and the posterior probability of the SVM and corrects the conditional probability by evaluating the current operating status of the SVM. By establishing the mechanism model of the plunger pump, several faults, including input load fluctuations, wear, and corrosion are diagnosed. Experiments show that during the process of diagnosing single and multiple fault types, the SVM-MM has faster detection and isolation speeds than the MM. Additionally, the value of the weight factor is discussed. The larger the value is, the faster the speed, but the influence of the SVM uncertainty is greater. The SVM-MM is also robust to the influences of SVM misclassifications and parameter fluctuations caused by fault evolutions. With the constructed potential fault state model group, the SVM-MM can detect and isolate slowly changing faults for mechanical equipment. For unknown fault diagnosis cases, the method updates the conditional probability in combination with the posterior probability of the SVM, preventing all probabilities from exceeding the threshold so that the model can indicate that the system is currently in a new unknown state, thereby enabling the diagnosis of unknown faults.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}