
Calibration and Validation of Two Tidal Sand Wave Models: A Case Study of The Netherlands Continental Shelf
 , , and
, , and
Abstract
:1. Introduction
- To what extent can the observed sand wave lengths be reproduced by the linear model?
- To what extent can the observed sand wave heights be reproduced by the nonlinear model?
2. Methods
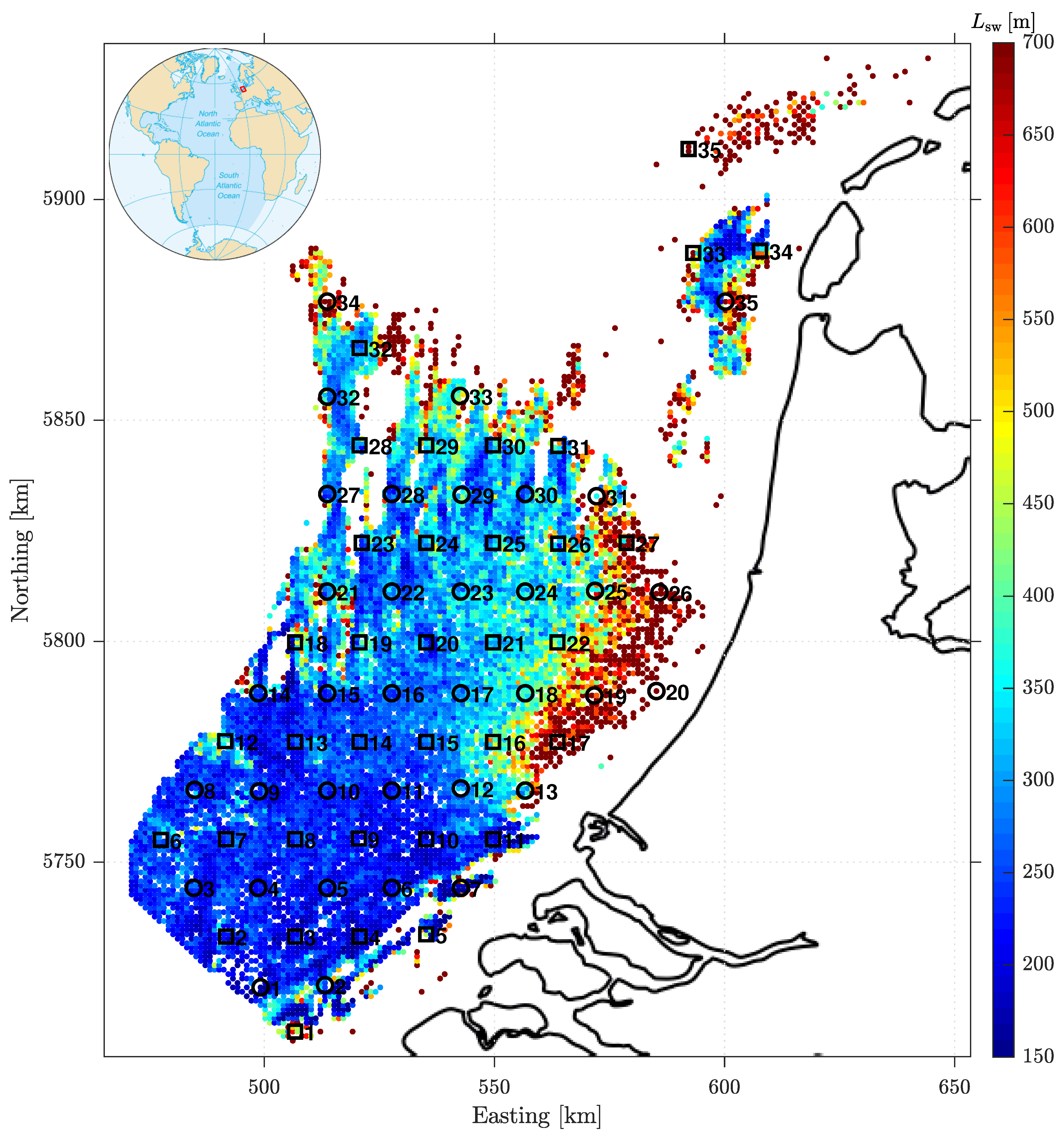
2.1. Sand Wave Data from the Netherlands Continental Shelf
2.2. A Two-Step Model Approach
2.3. Selection of Calibration and Validation Locations
2.4. Model Input


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Parameter | Const. | Cal. | Local | Symbol | Value | Unit |
|---|---|---|---|---|---|---|
| Water depth | · | · | √ | H | · | m |
| Tidal current velocity (M2) | · | · | √ | · | m s | |
| Residual current velocity (M0) | · | · | √ | · | m s | |
| Tidal frequency (M2) | √ | · | · | rad s | ||
| Tidal angle (M0, M2) | √ | · | · | 0 | ||
| Wave friction factor | √ | · | · | 0.1 | - | |
| Gravitational acceleration | √ | · | · | g | 9.81 | m s |
| Vertical eddy viscosity | · | · | √ | m s | ||
| Slip parameter | · | √ | · | S | m s | |
| Slope correction factor | √ | · | · | 1.5 | - | |
| Coriolis parameter | √ | · | · | f | 0 | rad s |
| Tidal ellipticity (M2) | √ | · | · | 0 | - | |
| Sediment grain size | · | · | √ | d | · | m |
| Bed load exponent | √ | · | · | 1.5 | - | |
| Bed load coefficient | · | · | √ | mskg | ||
| Surface wave height | · | · | √ | · | m | |
| Surface wave period | · | √ | · | 5.88 | s |
2.5. Calibration Using Linear Model
2.6. Validation Using Linear and Nonlinear Models
3. Results
3.1. Uncalibrated Sand Wave Lengths
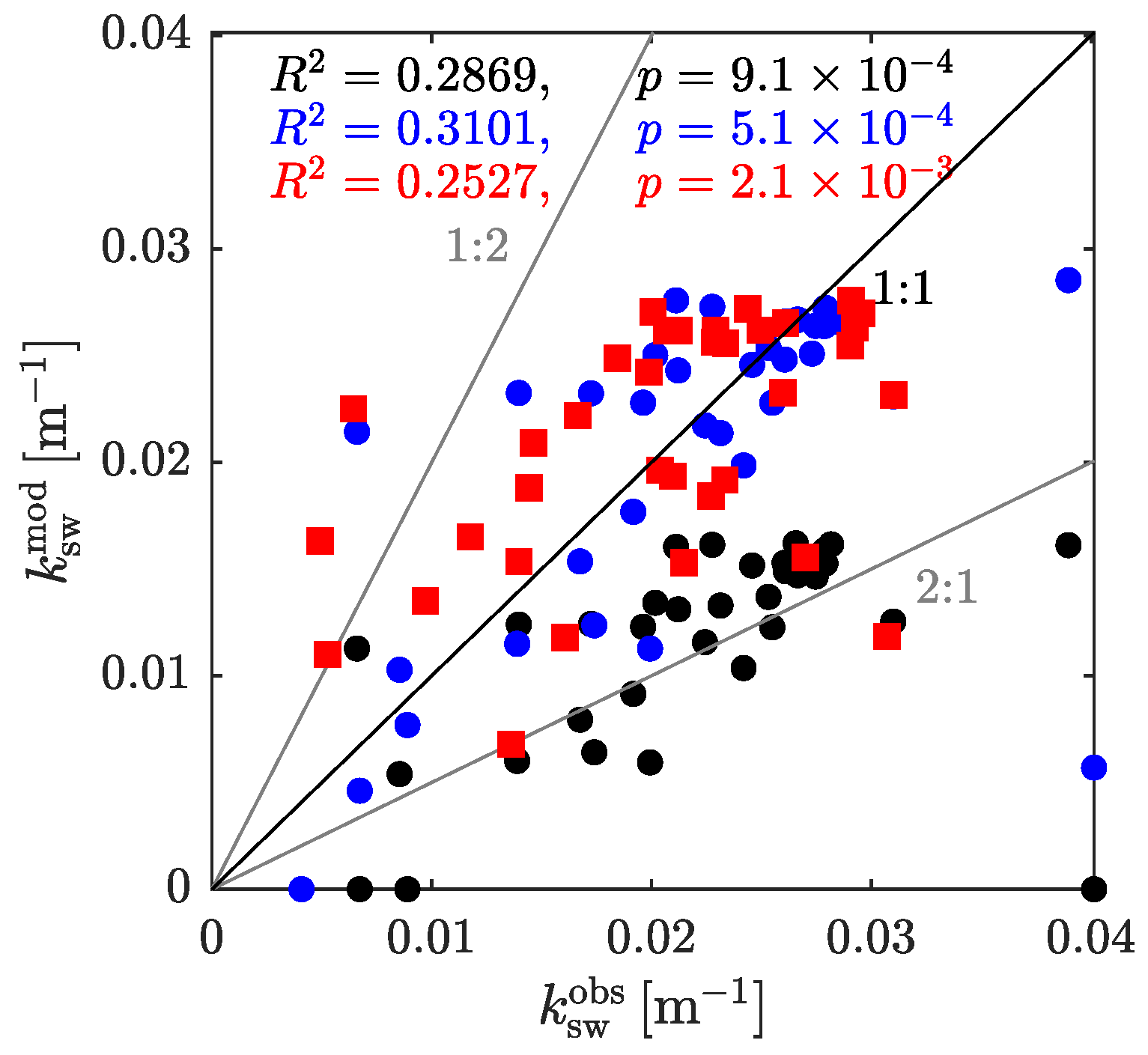
3.2. Calibration on Topographic Wave Number
3.3. Validation of Topographic Wave Number

| # | East | North | H | d | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [km] | [km] | [m] | [m] | [ms] | [ms] | [m] | [ms] | [mskg] | [m] | [m] | [m] | [m] | [m] | |
| 1 | 507 | 5712 | 22.8 | 341 | 0.48 | 0.07 | 3.5 | 535 | 381 | 2.8 | 9.2 | 2.1 | ||
| 2 | 492 | 5734 | 33.4 | 469 | 0.53 | 0.04 | 3.8 | 215 | 239 | 5.7 | 16.3 | 7.1 | ||
| 3 | 507 | 5734 | 32.1 | 416 | 0.52 | 0.04 | 3.8 | 216 | 228 | 4.8 | 14.9 | 6.2 | ||
| 4 | 521 | 5734 | 27.6 | 372 | 0.53 | 0.04 | 3.8 | 216 | 247 | 3.5 | 12.5 | 4.4 | ||
| 5 | 535 | 5734 | 22.1 | 352 | 0.51 | 0.04 | 3.6 | 450 | 409 | 4.1 | 10.4 | 3.0 | ||
| 6 | 477 | 5755 | 44.0 | 469 | 0.55 | 0.05 | 4.1 | 269 | 328 | 6.4 | 24.0 | 12.6 | ||
| 7 | 492 | 5756 | 37.6 | 446 | 0.54 | 0.04 | 4.1 | 242 | 270 | 6.1 | 19.4 | 9.3 | ||
| 8 | 507 | 5756 | 33.2 | 391 | 0.52 | 0.04 | 4.1 | 241 | 237 | 5.4 | 15.6 | 6.7 | ||
| 9 | 520 | 5756 | 30.3 | 334 | 0.52 | 0.04 | 4.1 | 213 | 233 | 4.3 | 13.2 | 5.0 | ||
| 10 | 535 | 5756 | 27.1 | 352 | 0.50 | 0.04 | 4.0 | 202 | 271 | 3.7 | 11.6 | 3.8 | ||
| 11 | 550 | 5756 | 21.9 | 338 | 0.49 | 0.06 | 3.9 | 205 | 530 | 2.9 | 9.8 | 2.6 | ||
| 12 | 491 | 5778 | 38.9 | 410 | 0.54 | 0.06 | 4.2 | 377 | 283 | 5.7 | 20.3 | 10.0 | ||
| 13 | 507 | 5778 | 33.7 | 405 | 0.53 | 0.05 | 4.2 | 252 | 240 | 5.1 | 15.5 | 6.6 | ||
| 14 | 521 | 5778 | 31.9 | 403 | 0.51 | 0.05 | 4.3 | 258 | 231 | 5.3 | 13.6 | 5.2 | ||
| 15 | 535 | 5778 | 29.0 | 340 | 0.50 | 0.05 | 4.3 | 275 | 245 | 5.6 | 11.5 | 3.8 | ||
| 16 | 550 | 5778 | 25.7 | 365 | 0.48 | 0.06 | 4.2 | 436 | 334 | 6.6 | 10.2 | 2.8 | ||
| 17 | 564 | 5778 | 22.6 | 368 | 0.46 | 0.06 | 4.2 | 1193 | 571 | 3.8 | 9.7 | 2.5 | ||
| 18 | 507 | 5800 | 36.6 | 342 | 0.53 | 0.05 | 4.4 | 316 | 259 | 6.1 | 18.0 | 8.4 | ||
| 19 | 521 | 5800 | 35.3 | 353 | 0.49 | 0.07 | 4.4 | 313 | 232 | 6.0 | 15.5 | 6.6 | ||
| 20 | 535 | 5800 | 29.4 | 316 | 0.49 | 0.06 | 4.4 | 269 | 246 | 4.0 | 11.0 | 3.4 | ||
| 21 | 550 | 5800 | 26.5 | 348 | 0.48 | 0.06 | 4.5 | 300 | 325 | 4.5 | 10.1 | 2.8 | ||
| 22 | 564 | 5800 | 23.4 | 327 | 0.47 | 0.07 | 4.4 | 391 | 533 | 3.8 | 9.7 | 2.5 | ||
| 23 | 521 | 5823 | 24.6 | 316 | 0.52 | 0.07 | 4.5 | 233 | 404 | 3.8 | 10.0 | 2.7 | ||
| 24 | 535 | 5823 | 30.3 | 304 | 0.50 | 0.07 | 4.6 | 296 | 240 | 4.0 | 11.1 | 3.5 | ||
| 25 | 550 | 5823 | 30.3 | 267 | 0.48 | 0.07 | 4.7 | 304 | 240 | 3.7 | 10.7 | 3.2 | ||
| 26 | 564 | 5822 | 25.3 | 265 | 0.47 | 0.08 | 4.6 | 292 | 411 | 2.7 | 9.4 | 2.3 | ||
| 27 | 579 | 5823 | 24.1 | 254 | 0.48 | 0.09 | 4.5 | 647 | 466 | 2.5 | 9.1 | 2.1 | ||
| 28 | 521 | 5845 | 26.2 | 291 | 0.50 | 0.08 | 4.6 | 277 | 341 | 2.7 | 9.8 | 2.6 | ||
| 29 | 535 | 5845 | 29.4 | 296 | 0.48 | 0.09 | 4.7 | 341 | 252 | 2.2 | 10.2 | 2.8 | ||
| 30 | 550 | 5845 | 27.2 | 280 | 0.47 | 0.09 | 4.8 | 308 | 320 | 1.9 | 9.5 | 2.3 | ||
| 31 | 564 | 5844 | 27.9 | 282 | 0.47 | 0.10 | 4.8 | 430 | 300 | 1.6 | 9.6 | 2.4 | ||
| 32 | 521 | 5867 | 29.8 | 290 | 0.44 | 0.10 | 4.7 | 274 | 240 | 2.6 | 9.5 | 2.3 | ||
| 33 | 593 | 5888 | 29.1 | 311 | 0.39 | 0.15 | 5.0 | 976 | 279 | 2.3 | 10.7 | 3.2 | ||
| 34 | 608 | 5889 | 22.2 | 339 | 0.43 | 0.15 | 4.9 | 462 | 926 | 2.5 | 6.8 | 0.4 | ||
| 35 | 592 | 5912 | 28.1 | 299 | 0.34 | 0.15 | 5.2 | 1277 | 385 | 1.9 | 8.8 | 1.8 |

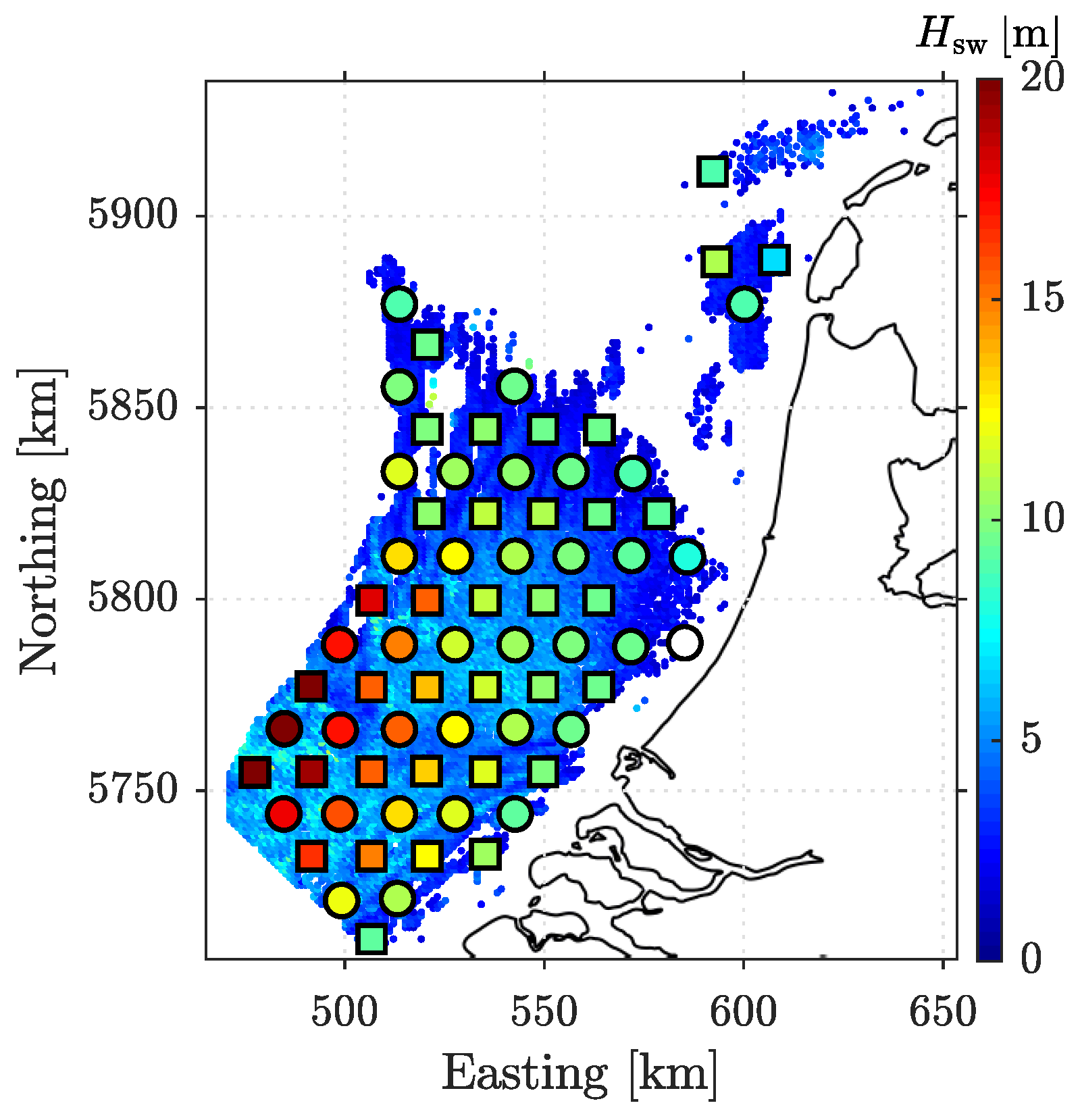
3.4. Comparison of Sand Wave Heights
3.5. Rescaling of Sand Wave Heights Using Observations
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Németh, A.; Hulscher, S.J.M.H.; De Vriend, H.J. Offshore sand wave dynamics, engineering problems and future solutions. Pipeline Gas J. 2003, 230, 67–69. [Google Scholar]
- Van der Veen, H.H.; Hulscher, S.J.M.H.; Knaapen, M.A.F. Grain size dependency in the occurrence of sand waves. Ocean Dyn. 2006, 56, 228–234. [Google Scholar] [CrossRef]
- Dorst, L.L.; Roos, P.C.; Hulscher, S.J.M.H. Improving a bathymetric resurvey policy with observed sea floor dynamics. J. Appl. Geod. 2013, 7, 51–64. [Google Scholar] [CrossRef]
- Campmans, G.H.P.; Roos, P.C.; Van der Sleen, N.R.; Hulscher, S.J.M.H. Modeling tidal sand wave recovery after dredging: Effect of different types of dredging strategies. Coast. Eng. 2021, 165, 103862. [Google Scholar] [CrossRef]
- Leenders, S.; Damveld, J.; Schouten, J.; Hoekstra, R.; Roetert, T.; Borsje, B. Numerical modelling of the migration direction of tidal sand waves over sand banks. Coast. Eng. 2021, 163, 103790. [Google Scholar] [CrossRef]
- Morelissen, R.; Hulscher, S.J.M.H.; Knaapen, M.A.F.; Németh, A.A.; Bijker, R. Mathematical modelling of sand wave migration and the interaction with pipelines. Coast. Eng. 2003, 48, 197–209. [Google Scholar] [CrossRef]
- Knaapen, M.A.F. Sandwave migration predictor based on shape information. J. Geophys. Res. Earth Surf. 2005, 110. [Google Scholar] [CrossRef] [Green Version]
- Katoh, K.; Kume, H.; Kuroki, K.; Hasegawa, J. The development of sand waves and the maintenance of navigation channels in the Bisanseto Sea. Coast. Eng. Proc. 1998, 1, 3490–3502. [Google Scholar]
- Roos, P.C.; Hulscher, S.J.M.H. Large-scale seabed dynamics in offshore morphology: Modeling human intervention. Rev. Geophys. 2003, 41. [Google Scholar] [CrossRef] [Green Version]
- Terwindt, J.H.J. Sand waves in the Southern Bight of the North Sea. Mar. Geol. 1971, 10, 51–67. [Google Scholar] [CrossRef]
- Van Dijk, T.A.G.P.; Kleinhans, M.G. Processes controlling the dynamics of compound sand waves in the North Sea, Netherlands. J. Geophys. Res. Earth Surf. 2005, 110. [Google Scholar] [CrossRef]
- Damen, J.M.; Van Dijk, T.A.G.P.; Hulscher, S.J.M.H. Spatially varying environmental properties controlling observed sand wave morphology. J. Geophys. Res. Earth Surf. 2018, 123, 262–280. [Google Scholar] [CrossRef]
- Allen, J.R.L. Sand waves: A model of origin and internal structure. Sediment. Geol. 1980, 26, 281–328. [Google Scholar] [CrossRef]
- Hulscher, S.J.M.H. Tidal-induced large-scale regular bed form patterns in a three-dimensional shallow water model. J. Geophys. Res. Ocean. 1996, 101, 20727–20744. [Google Scholar] [CrossRef]
- Dodd, N.; Blondeaux, P.; Calvete, D.; De Swart, H.E.; Falqués, A.; Hulscher, S.J.M.H.; Różyński, G.; Vittori, G. Understanding coastal morphodynamics using stability methods. J. Coast. Res. 2003, 19, 849–865. [Google Scholar]
- Németh, A.A.; Hulscher, S.J.M.H.; De Vriend, H.J. Modelling sand wave migration in shallow shelf seas. Cont. Shelf Res. 2002, 22, 2795–2806. [Google Scholar] [CrossRef]
- Besio, G.; Blondeaux, P.; Brocchini, M.; Vittori, G. On the modeling of sand wave migration. J. Geophys. Res. Ocean. 2004, 109. [Google Scholar] [CrossRef] [Green Version]
- Van Oyen, T.; Blondeaux, P. Tidal sand wave formation: Influence of graded suspended sediment transport. J. Geophys. Res. Ocean. 2009, 114. [Google Scholar] [CrossRef]
- Campmans, G.H.P.; Roos, P.C.; De Vriend, H.J.; Hulscher, S.J.M.H. Modeling the influence of storms on sand wave formation: A linear stability approach. Cont. Shelf Res. 2017, 137, 103–116. [Google Scholar] [CrossRef]
- Damveld, J.H.; Roos, P.C.; Borsje, B.W.; Hulscher, S.J. Modelling the two-way coupling of tidal sand waves and benthic organisms: A linear stability approach. Environ. Fluid Mech. 2019, 19, 1073–1103. [Google Scholar] [CrossRef] [Green Version]
- Hulscher, S.J.M.H.; Van den Brink, G.M. Comparison between predicted and observed sand waves and sand banks in the North Sea. J. Geophys. Res. Ocean. 2001, 106, 9327–9338. [Google Scholar] [CrossRef] [Green Version]
- Cherlet, J.; Besio, G.; Blondeaux, P.; Van Lancker, V.; Verfaillie, E.; Vittori, G. Modeling sand wave characteristics on the Belgian Continental Shelf and in the Calais-Dover Strait. J. Geophys. Res. Ocean. 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Van Santen, R.B.; De Swart, H.E.; Van Dijk, T.A.G.P. Sensitivity of tidal sand wavelength to environmental parameters: A combined data analysis and modelling approach. Cont. Shelf Res. 2011, 31, 966–978. [Google Scholar] [CrossRef]
- Besio, G.; Blondeaux, P.; Vittori, G. On the formation of sand waves and sand banks. J. Fluid Mech. 2006, 557, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Blondeaux, P.; Vittori, G. A model to predict the migration of sand waves in shallow tidal seas. Cont. Shelf Res. 2016, 112, 31–45. [Google Scholar] [CrossRef]
- Campmans, G.H.P.; Roos, P.C.; Schrijen, E.P.W.J.; Hulscher, S.J.M.H. Modeling wave and wind climate effects on tidal sand wave dynamics: A North Sea case study. Estuar. Coast. Shelf Sci. 2018, 213, 137–147. [Google Scholar] [CrossRef] [Green Version]
- Németh, A.A.; Hulscher, S.J.M.H.; Van Damme, R.M.J. Modelling offshore sand wave evolution. Cont. Shelf Res. 2007, 27, 713–728. [Google Scholar] [CrossRef]
- Van den Berg, J.; Sterlini, F.; Hulscher, S.J.M.H.; Van Damme, R.M.J. Non-linear process based modelling of offshore sand waves. Cont. Shelf Res. 2012, 37, 26–35. [Google Scholar] [CrossRef]
- Van Gerwen, W.; Borsje, B.W.; Damveld, J.H.; Hulscher, S.J.M.H. Modelling the effect of suspended load transport and tidal asymmetry on the equilibrium tidal sand wave height. Coast. Eng. 2018, 136, 56–64. [Google Scholar] [CrossRef] [Green Version]
- Campmans, G.H.P.; Roos, P.C.; de Vriend, H.J.; Hulscher, S.J.M.H. The influence of storms on sand wave evolution: A nonlinear idealized modeling approach. J. Geophys. Res. Earth Surf. 2018, 123, 2070–2086. [Google Scholar] [CrossRef] [Green Version]
- Krabbendam, J.; Nnafie, A.; de Swart, H.; Borsje, B.; Perk, L. Modelling the Past and Future Evolution of Tidal Sand Waves. J. Mar. Sci. Eng. 2021, 9, 1071. [Google Scholar] [CrossRef]
- Borsje, B.W.; Kranenburg, W.M.; Roos, P.C.; Matthieu, J.; Hulscher, S.J.M.H. The role of suspended load transport in the occurrence of tidal sand waves. J. Geophys. Res. Earth Surf. 2014, 119, 701–716. [Google Scholar] [CrossRef] [Green Version]
- Damen, J.M.; van Dijk, T.A.G.P.; Hulscher, S.J.M.H. Replication Data for: Spatially varying environmental properties controlling observed sand wave morphology. J. Geophys. Res. Earth Surf. 2018, 123, 262–280. [Google Scholar] [CrossRef]
- Maljers, D.; Gunnink, J. Interpolation of Measured Grain-Size Fractions. Available online: http://www.searchmesh.net/Default.aspx (accessed on 11 November 2022).
- Gautier, C.; Caires, S. Operational wave forecasts in the southern North Sea. In Proceedings of the 36th IAHR World Congress, The Hague, The Netherlands, 28 June–3 July 2015; Volume 1, p. 5. [Google Scholar]
- Zijl, F.; Verlaan, M.; Gerritsen, H. Improved water-level forecasting for the Northwest European Shelf and North Sea through direct modelling of tide, surge and non-linear interaction. Ocean Dyn. 2013, 63, 823–847. [Google Scholar] [CrossRef]
- Bowden, K.; Hamilton, P. Some experiments with a numerical model of circulation and mixing in a tidal estuary. Estuar. Coast. Mar. Sci. 1975, 3, 281–301. [Google Scholar] [CrossRef]
- Davies, A.; Xing, J. The influence of eddy viscosity parameterization and turbulence energy closure scheme upon the coupling of tidal and wind induced currents. Estuar. Coast. Shelf Sci. 2001, 53, 415–436. [Google Scholar] [CrossRef]
- Roos, P.C.; Hulscher, S.J.M.H.; Knaapen, M.A.F.; Van Damme, R.M.J. The cross-sectional shape of tidal sandbanks: Modeling and observations. J. Geophys. Res. Earth Surf. 2004, 109. [Google Scholar] [CrossRef]
- King, E.V.; Conley, D.C.; Masselink, G.; Leonardi, N.; McCarroll, R.J.; Scott, T. The impact of waves and tides on residual sand transport on a sediment-poor, energetic, and macrotidal continental shelf. J. Geophys. Res. Ocean. 2019, 124, 4974–5002. [Google Scholar] [CrossRef]
- King, E.V.; Conley, D.C.; Masselink, G.; Leonardi, N. Predicting dominance of sand transport by waves, tides and their interactions on sandy continental shelves. J. Geophys. Res. Ocean. 2021, 126, e2021JC017200. [Google Scholar] [CrossRef]







| # | East | North | H | d | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [km] | [km] | [m] | [m] | [ms] | [ms] | [m] | [ms] | [mskg] | [m] | [m] | [m] | [m] | [m] | |
| 1 | 499 | 5722 | 29.0 | 342 | 0.50 | 0.05 | 3.6 | 161 | 220 | 4.2 | 12.1 | 4.2 | ||
| 2 | 513 | 5723 | 25.5 | 379 | 0.49 | 0.04 | 3.6 | 246 | 276 | 3.7 | 10.9 | 3.4 | ||
| 3 | 485 | 5745 | 34.9 | 438 | 0.55 | 0.04 | 4.0 | 256 | 256 | 7.5 | 17.6 | 8.1 | ||
| 4 | 499 | 5745 | 33.0 | 410 | 0.53 | 0.04 | 4.0 | 223 | 237 | 6.2 | 15.7 | 6.7 | ||
| 5 | 514 | 5745 | 29.0 | 309 | 0.53 | 0.04 | 4.0 | 229 | 238 | 6.6 | 12.8 | 4.7 | ||
| 6 | 528 | 5745 | 26.7 | 386 | 0.53 | 0.04 | 3.9 | 203 | 272 | 4.8 | 11.9 | 4.0 | ||
| 7 | 543 | 5745 | 17.5 | 315 | 0.49 | 0.05 | 3.6 | 157 | 1102 | 2.6 | 9.3 | 2.2 | ||
| 8 | 485 | 5767 | 38.5 | 427 | 0.57 | 0.05 | 4.1 | 272 | 294 | 6.3 | 20.8 | 10.4 | ||
| 9 | 499 | 5766 | 34.9 | 417 | 0.53 | 0.05 | 4.2 | 230 | 250 | 4.6 | 17.0 | 7.6 | ||
| 10 | 514 | 5767 | 33.7 | 424 | 0.52 | 0.05 | 4.2 | 237 | 236 | 4.6 | 15.5 | 6.6 | ||
| 11 | 528 | 5767 | 30.2 | 493 | 0.50 | 0.05 | 4.2 | 225 | 231 | 4.7 | 12.3 | 4.3 | ||
| 12 | 543 | 5767 | 27.2 | 399 | 0.49 | 0.05 | 4.1 | 320 | 276 | 5.0 | 10.9 | 3.4 | ||
| 13 | 557 | 5767 | 22.4 | 376 | 0.47 | 0.06 | 4.1 | 315 | 557 | 3.8 | 9.7 | 2.5 | ||
| 14 | 499 | 5789 | 35.3 | 386 | 0.53 | 0.06 | 4.3 | 241 | 253 | 4.6 | 17.0 | 7.6 | ||
| 15 | 514 | 5789 | 33.0 | 348 | 0.53 | 0.06 | 4.3 | 226 | 238 | 5.3 | 14.7 | 6.0 | ||
| 16 | 528 | 5789 | 30.0 | 358 | 0.50 | 0.06 | 4.4 | 236 | 235 | 5.1 | 11.6 | 3.8 | ||
| 17 | 543 | 5789 | 27.3 | 360 | 0.48 | 0.06 | 4.4 | 280 | 289 | 5.2 | 10.5 | 3.0 | ||
| 18 | 557 | 5789 | 24.7 | 348 | 0.47 | 0.06 | 4.3 | 375 | 409 | 5.1 | 9.9 | 2.6 | ||
| 19 | 572 | 5788 | 21.3 | 296 | 0.45 | 0.06 | 4.2 | 707 | 817 | 2.6 | 9.5 | 2.3 | ||
| 20 | 585 | 5789 | 17.8 | 379 | 0.41 | 0.06 | 4.1 | 1541 | – | 1.4 | – | – | ||
| 21 | 514 | 5812 | 32.6 | 332 | 0.51 | 0.07 | 4.4 | 276 | 230 | 3.6 | 13.1 | 4.9 | ||
| 22 | 528 | 5812 | 32.1 | 327 | 0.50 | 0.07 | 4.5 | 298 | 228 | 4.4 | 12.5 | 4.4 | ||
| 23 | 543 | 5812 | 29.0 | 315 | 0.49 | 0.07 | 4.5 | 296 | 259 | 4.9 | 10.7 | 3.2 | ||
| 24 | 557 | 5812 | 26.0 | 295 | 0.48 | 0.07 | 4.5 | 328 | 355 | 3.9 | 9.9 | 2.6 | ||
| 25 | 572 | 5812 | 23.5 | 283 | 0.46 | 0.07 | 4.5 | 453 | 547 | 3.0 | 9.3 | 2.2 | ||
| 26 | 586 | 5811 | 19.3 | 290 | 0.44 | 0.08 | 4.3 | 934 | 1362 | 2.8 | 7.9 | 1.2 | ||
| 27 | 514 | 5834 | 30.7 | 298 | 0.51 | 0.07 | 4.5 | 241 | 236 | 3.1 | 11.7 | 3.9 | ||
| 28 | 528 | 5834 | 29.3 | 307 | 0.49 | 0.08 | 4.5 | 248 | 248 | 2.7 | 10.5 | 3.0 | ||
| 29 | 543 | 5833 | 28.7 | 300 | 0.48 | 0.08 | 4.7 | 364 | 270 | 2.2 | 10.0 | 2.7 | ||
| 30 | 557 | 5834 | 27.2 | 267 | 0.48 | 0.09 | 4.7 | 260 | 316 | 1.8 | 9.7 | 2.5 | ||
| 31 | 572 | 5833 | 24.1 | 243 | 0.48 | 0.10 | 4.7 | 361 | 508 | 1.3 | 9.0 | 2.0 | ||
| 32 | 514 | 5856 | 29.3 | 286 | 0.46 | 0.09 | 4.6 | 312 | 251 | 3.0 | 9.9 | 2.6 | ||
| 33 | 542 | 5856 | 28.8 | 280 | 0.46 | 0.10 | 4.8 | 450 | 270 | 2.2 | 9.6 | 2.4 | ||
| 34 | 514 | 5877 | 28.1 | 276 | 0.42 | 0.10 | 4.7 | 952 | 293 | 1.3 | 8.9 | 1.9 | ||
| 35 | 600 | 5877 | 23.9 | 348 | 0.44 | 0.15 | 4.9 | 736 | 611 | 2.5 | 8.8 | 1.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Campmans, G.H.P.; van Dijk, T.A.G.P.; Roos, P.C.; Hulscher, S.J.M.H. Calibration and Validation of Two Tidal Sand Wave Models: A Case Study of The Netherlands Continental Shelf. J. Mar. Sci. Eng. 2022, 10, 1902. https://doi.org/10.3390/jmse10121902
Campmans GHP, van Dijk TAGP, Roos PC, Hulscher SJMH. Calibration and Validation of Two Tidal Sand Wave Models: A Case Study of The Netherlands Continental Shelf. Journal of Marine Science and Engineering. 2022; 10(12):1902. https://doi.org/10.3390/jmse10121902
Chicago/Turabian StyleCampmans, G. H. P., Thaienne A. G. P. van Dijk, Pieter C. Roos, and Suzanne J. M. H. Hulscher. 2022. "Calibration and Validation of Two Tidal Sand Wave Models: A Case Study of The Netherlands Continental Shelf" Journal of Marine Science and Engineering 10, no. 12: 1902. https://doi.org/10.3390/jmse10121902