
Predicting the Motion of a USV Using Support Vector Regression with Mixed Kernel Function


Abstract
:1. Introduction
2. Dynamic Model of USA
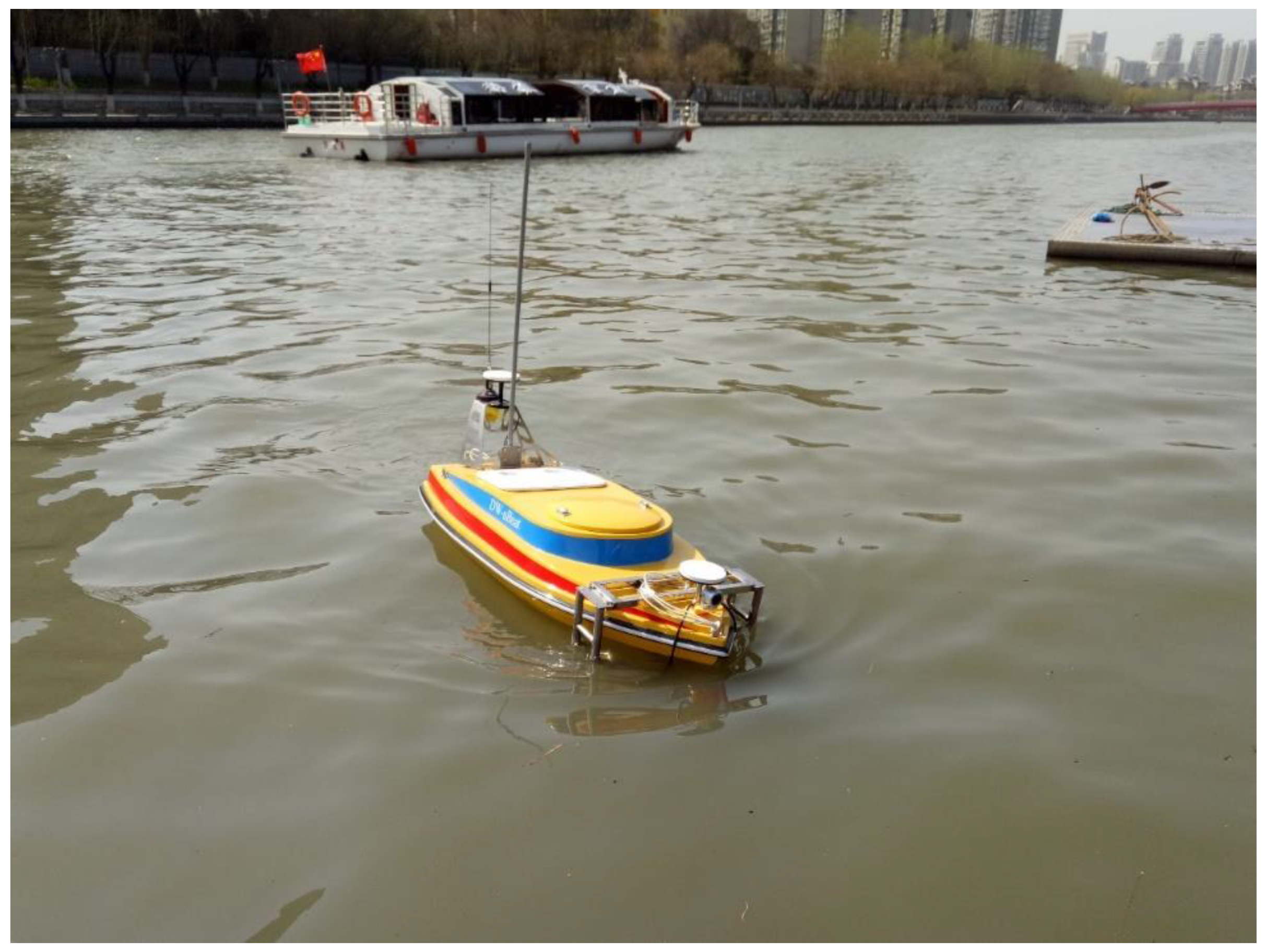
2.1. DW-uBoat USV
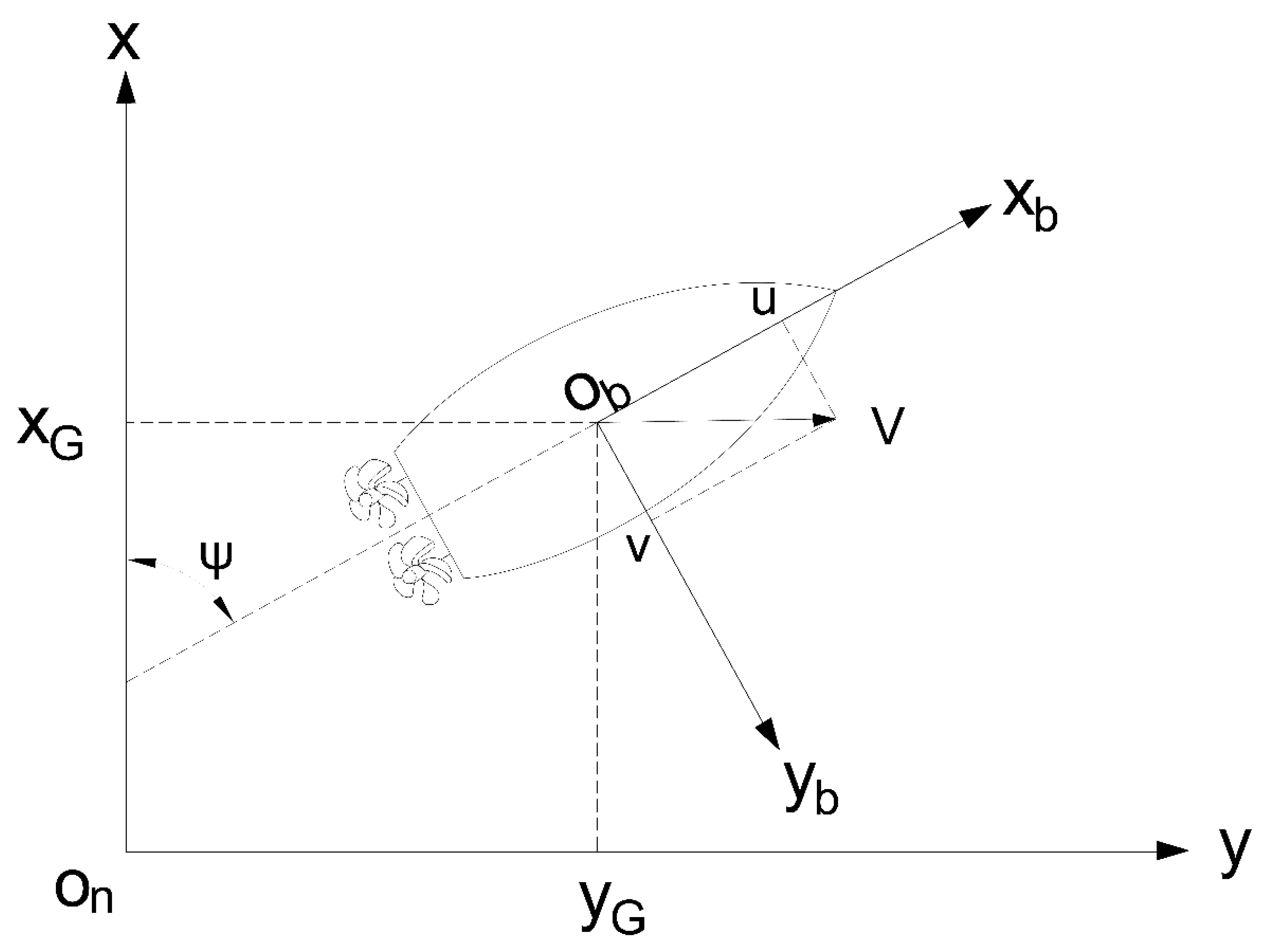
2.2. Kinematics of USV
2.3. Dynamic Model of USV
3. MK-SVR Algorithm for Modeling and Identification
3.1. SVR Formulation
3.2. MK Function and Choosing the Weight Coefficients
3.3. Identification and Modeling
- (1)
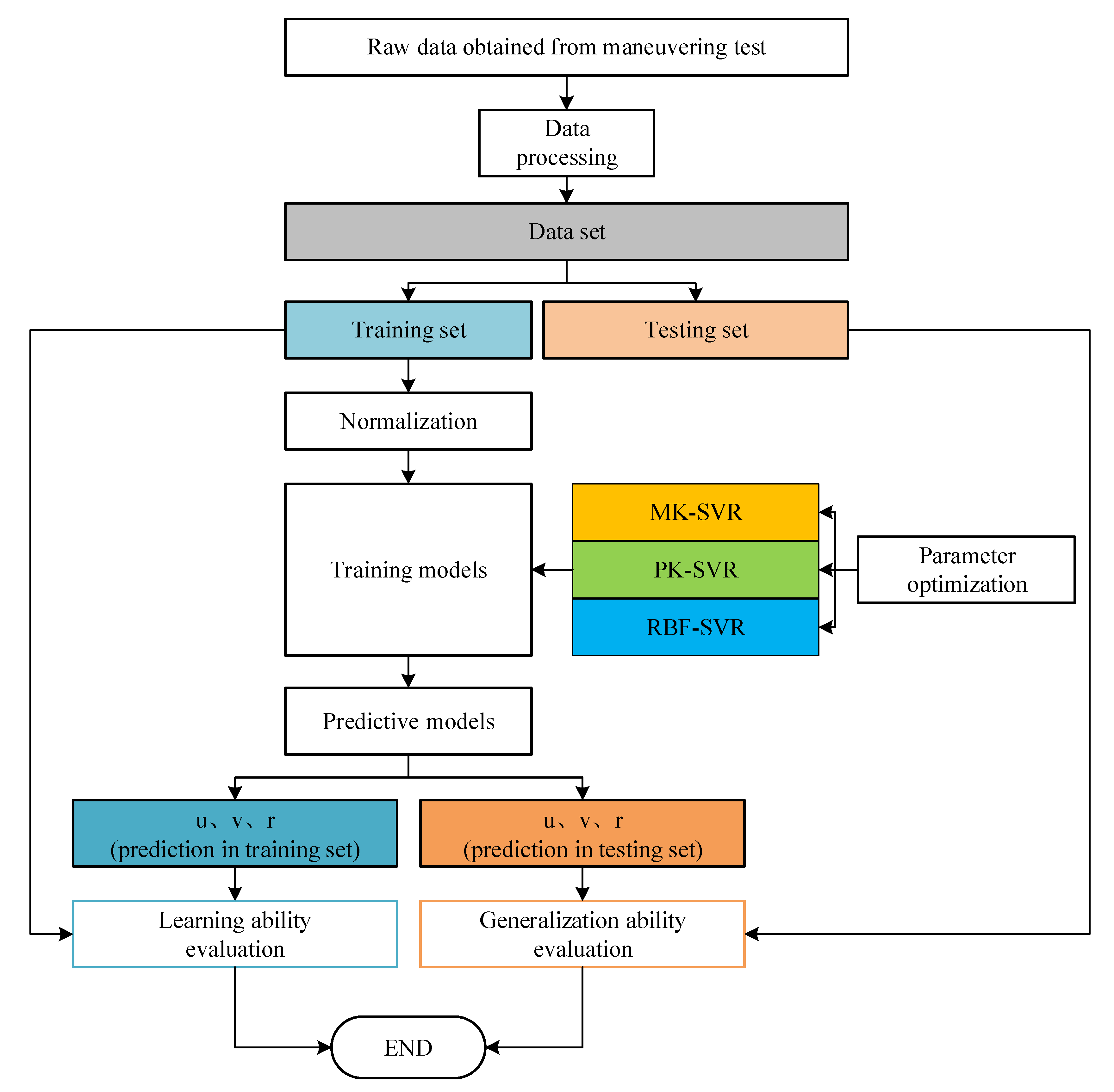
- The samples for system identification obtained from the maneuvering test were divided into a training set and a verification set.
- (2)
- The training data were taken as the input for system identification after being normalized.
- (3)
- The CV method was used to seek the optimum parameters in the SVR and the weight in the MK function.
- (4)
- Training and prediction models were established for PK-SVR, RBF-SVR, and MK-SVR.
- (5)
- The models were used to predict the surge velocity, sway velocity, and the yaw rate, and their results were compared.
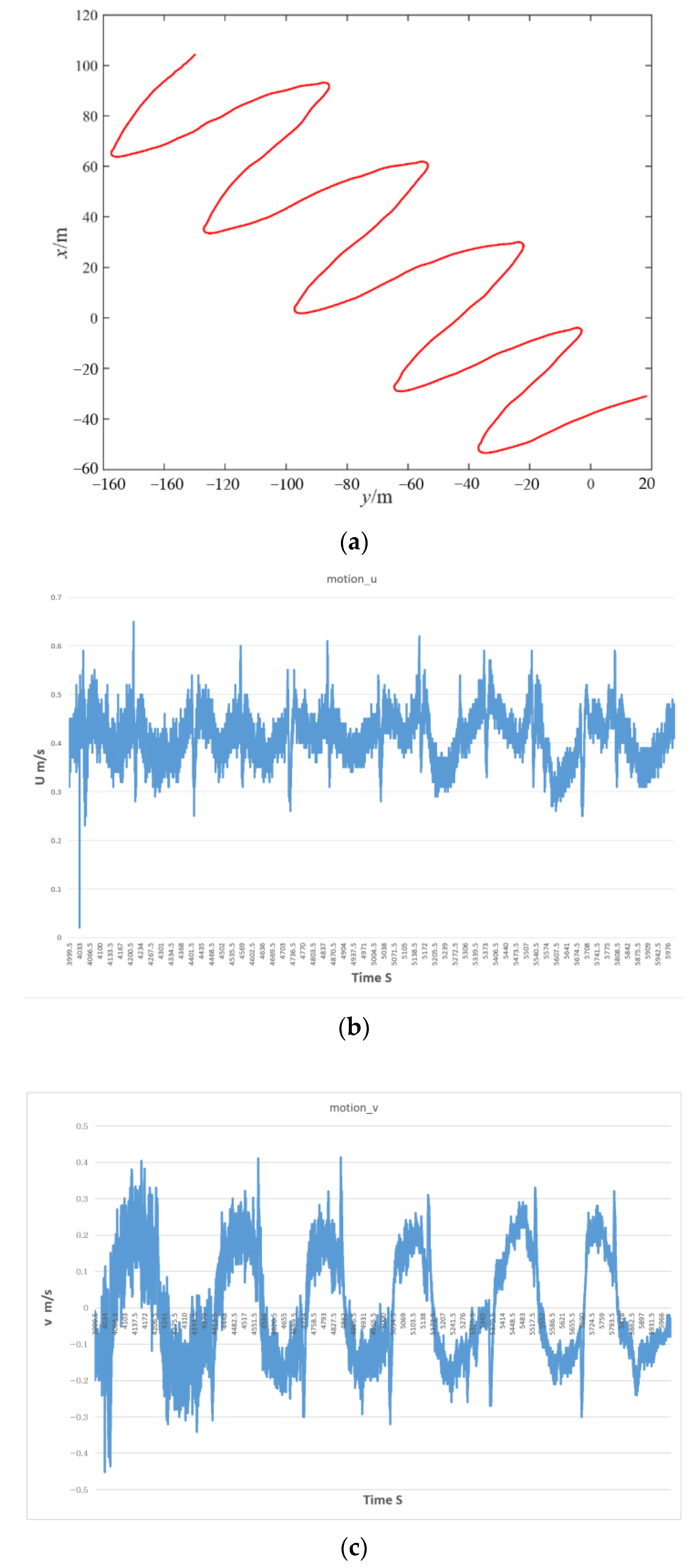
4. Zig-Zag Test and Data Processing
4.1. Zig-Zag Test of USV
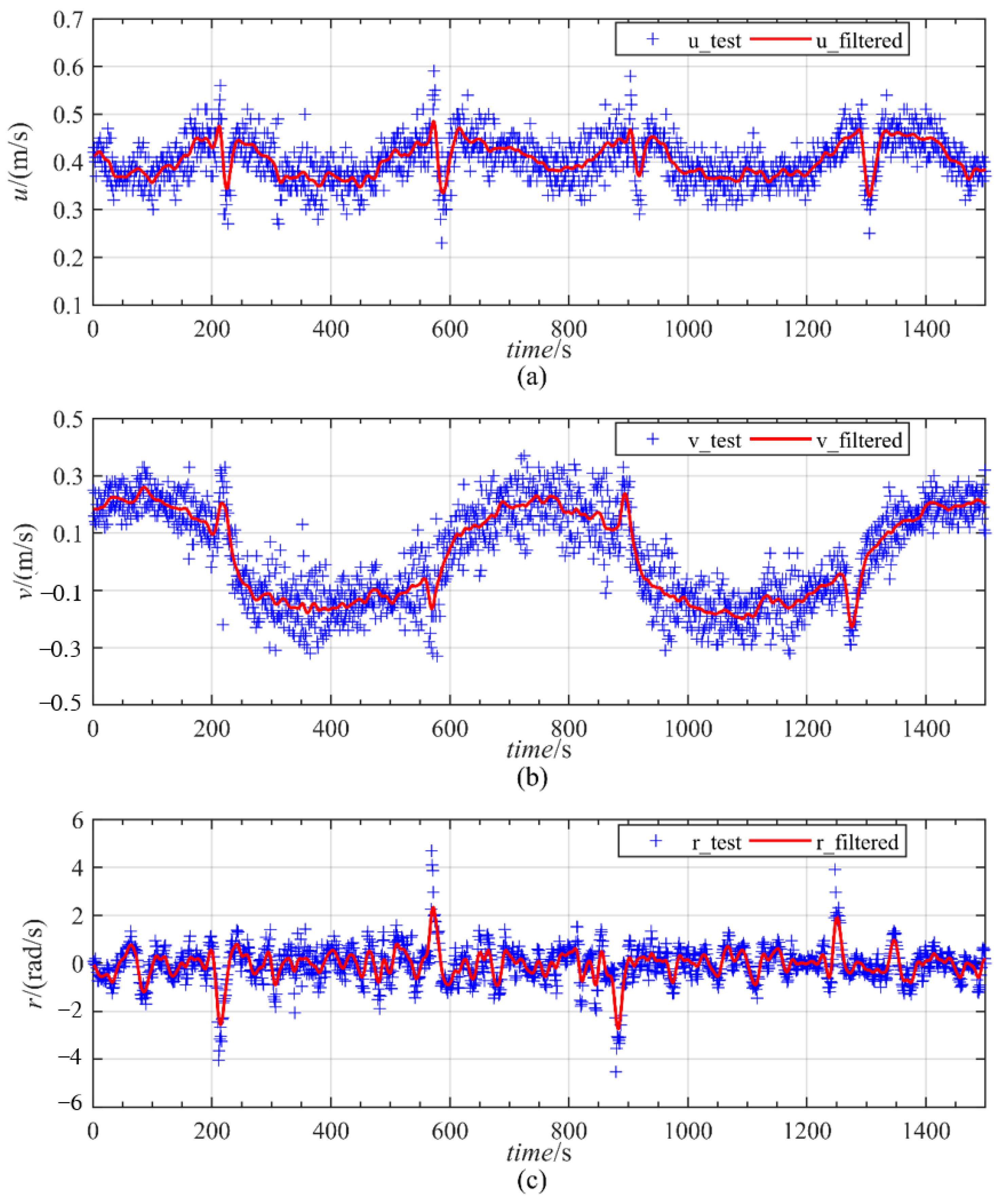
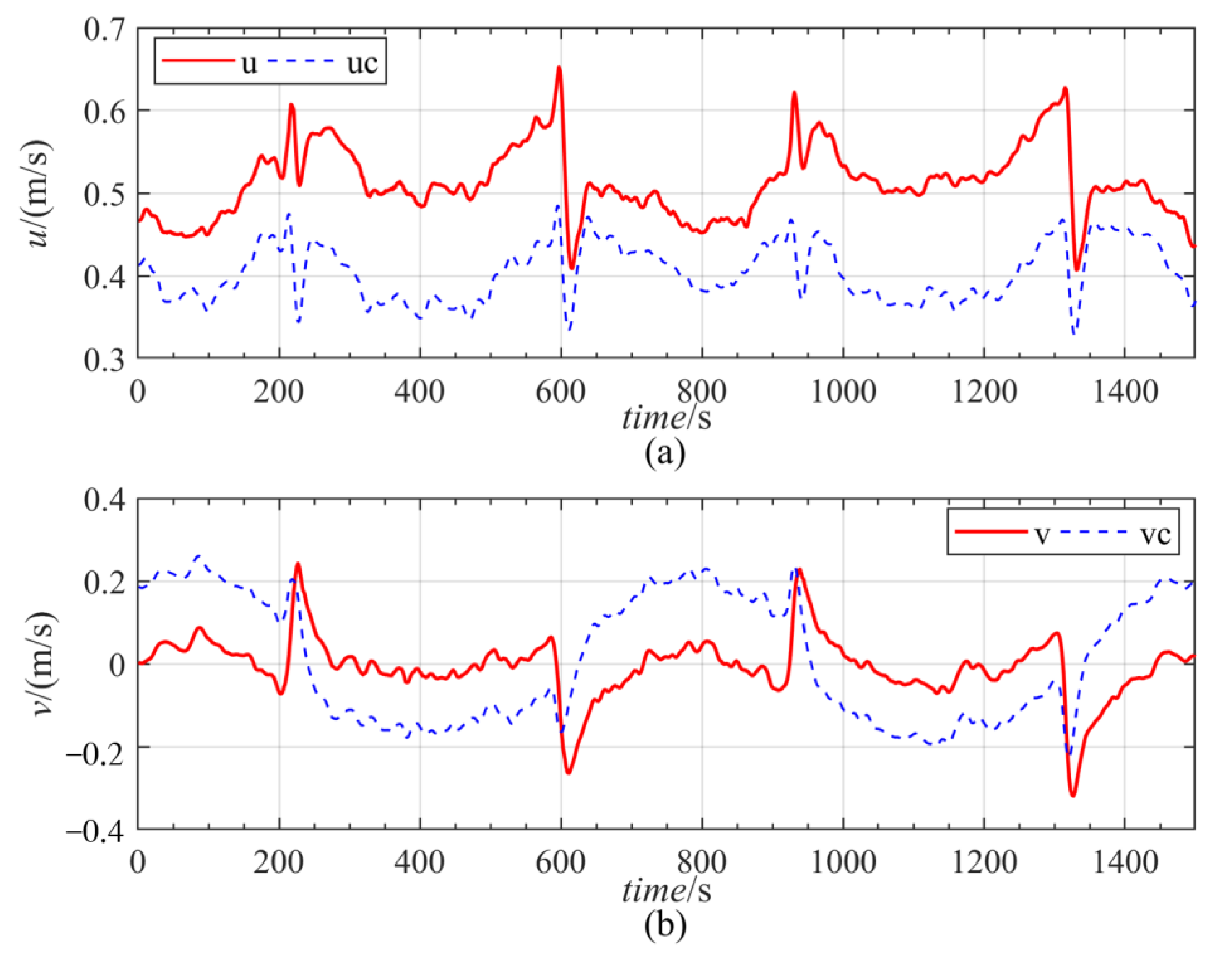
4.2. Data Processing
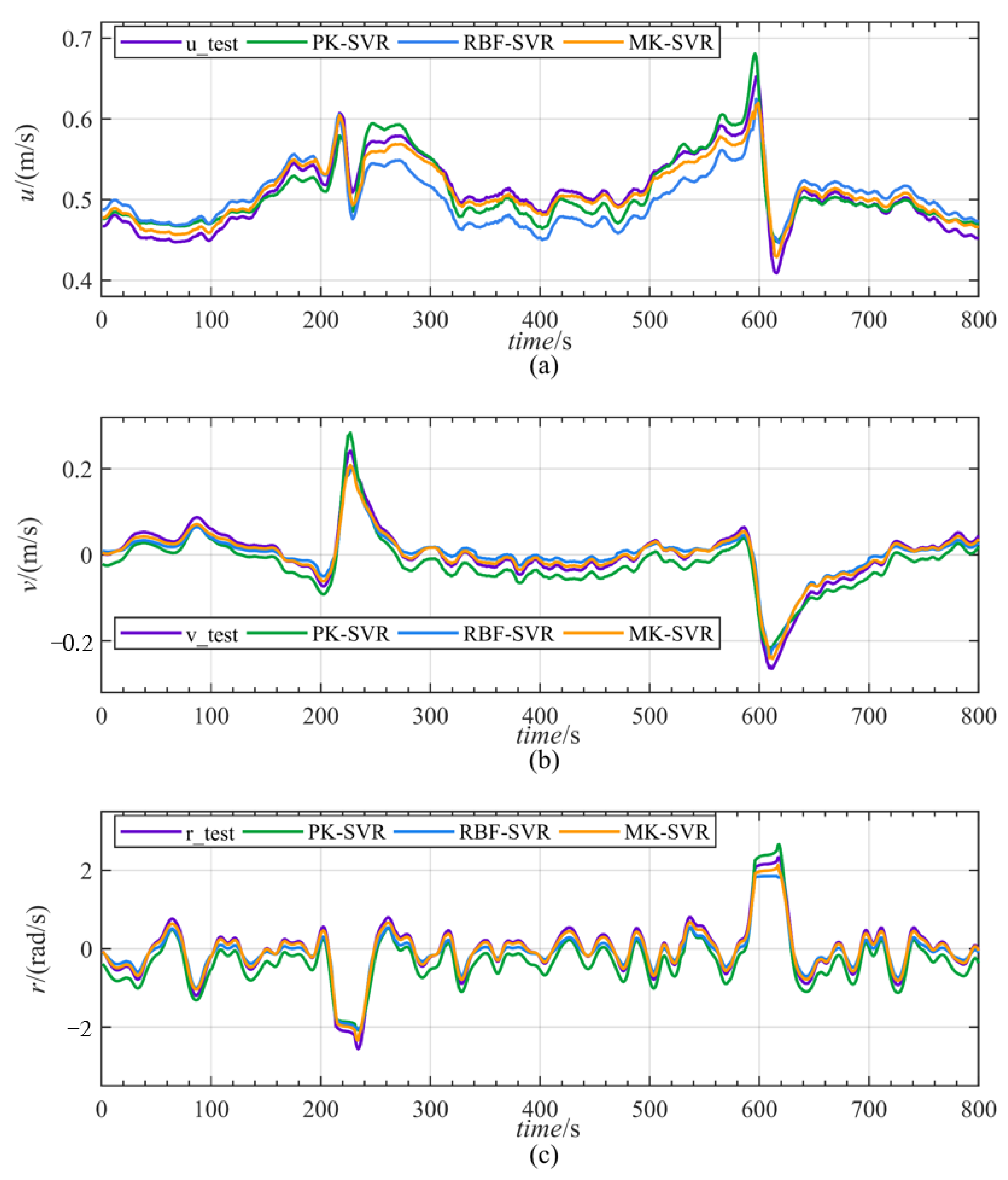
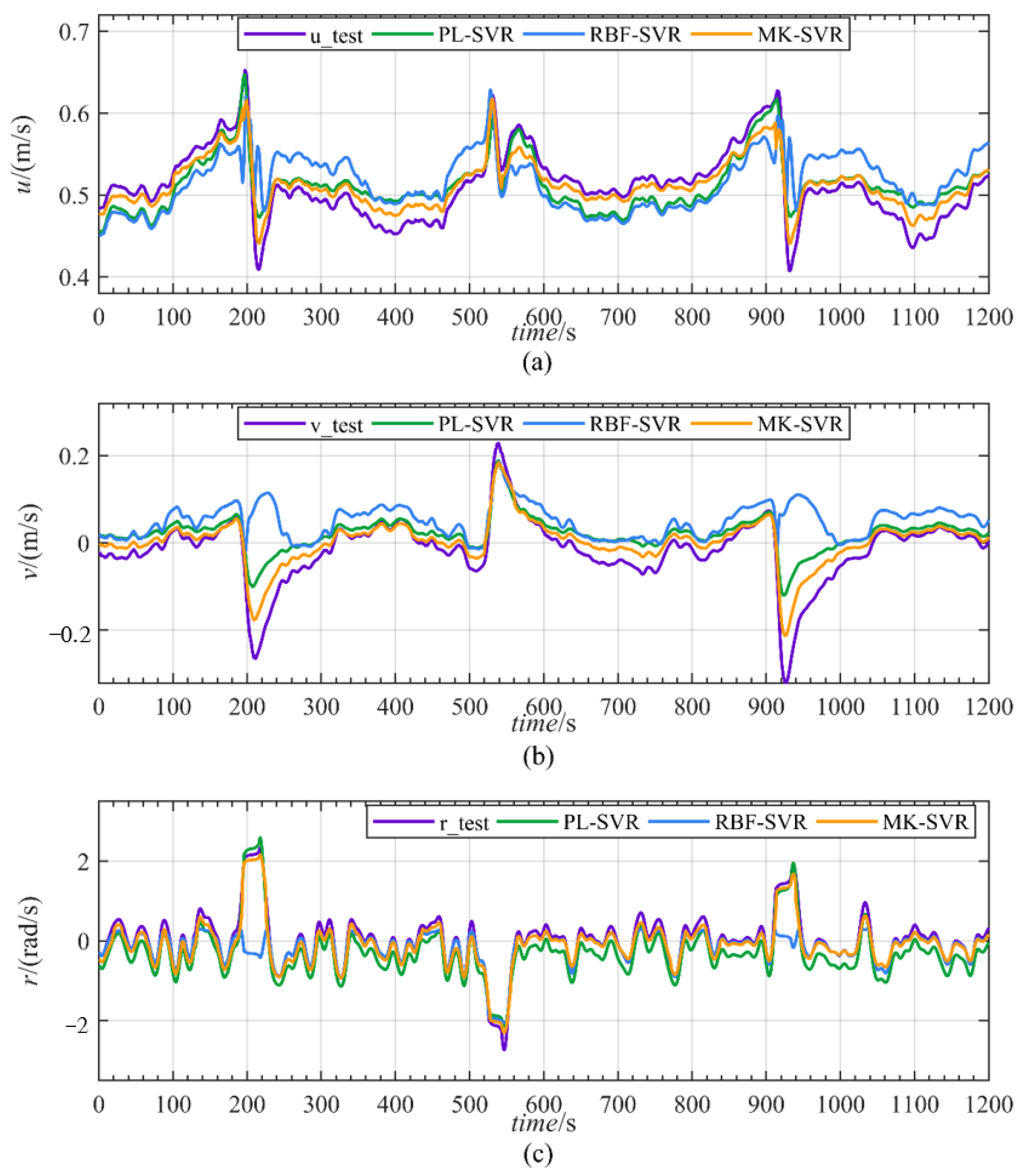
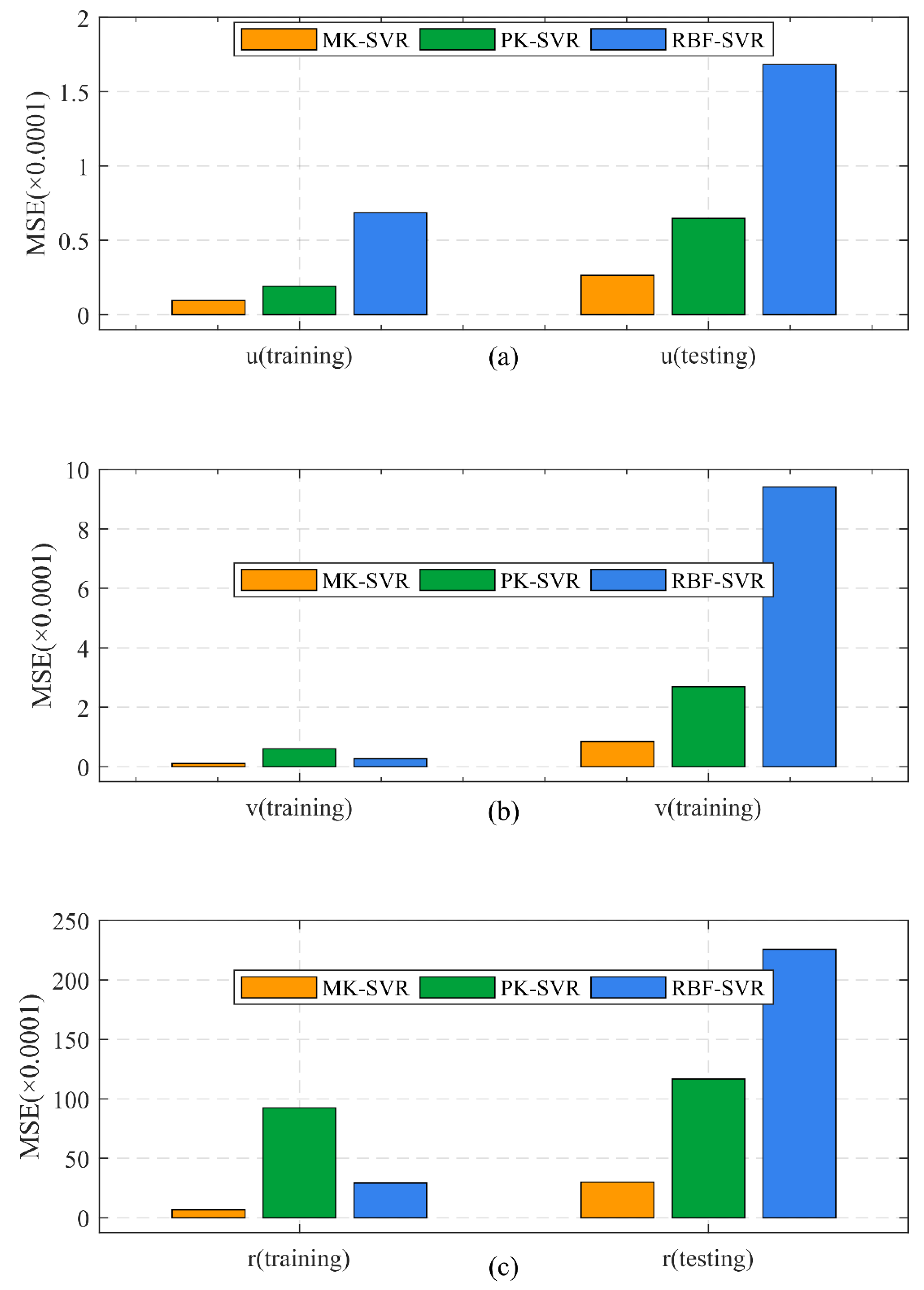
5. Comparison of the Results of Prediction
6. Conclusions
- (1)
- A full-scale USV test was carried out, and the data obtained from it were used to validate the accuracy of the MK-SVR method in terms of predicting the motion of the USV in an empirical setting.
- (2)
- Cross-validation was used to automatically search for the best weights in the MK function to better leverage the benefits of the global and local kernels. This helps maintain the accuracy of prediction through adaptive adjustment and reduces the time required for tuning.
- (3)
- The MK-SVR method was proposed to model and identify the motion of the DW-uBoat USV. The results of experiments showed that the MK-SVR method integrates the advantages of the local and global kernel functions such that it makes more accurate predictions and has better generalization ability than SVR based on the nuclear kernel function. The superior predictive performance of the MK-SVR method is quantified in Table 3 and Figure 7, Figure 8 and Figure 9, with less than 0.05 MSE in a practical environment in DW-uBoat field data.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qian, Z.; Lu, J.; Sun, X. Brief Analysis of Deep Learning Application in Future Unmanned Surface Vehicle Platform. Ship Build. China 2020, 61, 6–13. [Google Scholar]
- Rajesh, G.; Bhattacharyya, S.K. System Identification for Nonlinear Maneuvering of Large Tankers Using Artificial Neural Network. Appl. Ocean Res. 2008, 30, 256–263. [Google Scholar] [CrossRef]
- Pan, C.-Z.; Lai, X.-Z.; Yang, S.X.; Wu, M. An Efficient Neural Network Approach to Tracking Control of an Autonomous Surface Vehicle with Unknown Dynamics. Expert Syst. Appl. 2013, 40, 1629–1635. [Google Scholar] [CrossRef]
- Luo, W.; Hu, B.; Li, T. Neural Network Based Fin Control for Ship Roll Stabilization with Guaranteed Robustness. Neurocomputing 2017, 230, 210–218. [Google Scholar] [CrossRef]
- Jiang, Y.; Hou, X.-R.; Wang, X.-G.; Wang, Z.-H.; Yang, Z.-L.; Zou, Z.-J. Identification Modeling and Prediction of Ship Maneuvering Motion Based on LSTM Deep Neural Network. J. Mar. Sci. Technol. 2022, 27, 125–137. [Google Scholar] [CrossRef]
- Xu, P.-F.; Cheng, C.; Cheng, H.-X.; Shen, Y.-L.; Ding, Y.-X. Identification-Based 3 DOF Model of Unmanned Surface Vehicle Using Support Vector Machines Enhanced by Cuckoo Search Algorithm. Ocean Eng. 2020, 197, 106898. [Google Scholar] [CrossRef]
- Luo, W.; Zou, Z. Identification of Response Models of Ship Maneuvering Motion Using Support Vector Machines. Available online: https://www.researchgate.net/publication/292425432_Identification_of_response_models_of_ship_maneuvering_motion_using_support_vector_machines (accessed on 13 October 2022).
- Luo, W.; Zou, Z. Parametric Identification of Ship Maneuvering Models by Using Support Vector Machines. Available online: https://www.researchgate.net/publication/233653524_Parametric_Identification_of_Ship_Maneuvering_Models_by_Using_Support_Vector_Machines (accessed on 13 October 2022).
- Zhou, B.; Shi, A. Empirical Mode Decomposition Based LSSVM for Ship Motion Prediction; Zhou, B., Shi, A., Zeng, Z., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; Volume 7951, ISBN 978-3-642-39064-7. [Google Scholar]
- Wang, Z.; Zou, Z.; Guedes Soares, C. Identification of Ship Manoeuvring Motion Based on Nu-Support Vector Machine. Ocean Eng. 2019, 183, 270–281. [Google Scholar] [CrossRef]
- Luo, W.; Guedes Soares, C.; Zou, Z. Parameter Identification of Ship Maneuvering Model Based on Support Vector Machines and Particle Swarm Optimization. J. Offshore Mech. Arct. Eng. 2016, 138, 031101. [Google Scholar] [CrossRef]
- Zhu, M.; Hahn, A.; Wen, Y.-Q.; Bolles, A. Identification-Based Simplified Model of Large Container Ships Using Support Vector Machines and Artificial Bee Colony Algorithm. Appl. Ocean Res. 2017, 68, 249–261. [Google Scholar] [CrossRef]
- Xu, P.-F.; Luo, J. Research on Path Tracking of Unmanned Surface Vehicles. Shipbuild. China 2020, 61, 133–142. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Ogawa, A.; Kasai, H. On the Mathematical Model of Manoeuvring Motion of Ships. ISP 1978, 25, 306–319. [Google Scholar] [CrossRef]
- Woo, J.; Park, J.; Yu, C.; Kim, N. Dynamic Model Identification of Unmanned Surface Vehicles Using Deep Learning Network. Appl. Ocean Res. 2018, 78, 123–133. [Google Scholar] [CrossRef]
- Scholkopf, B.; Burges, C.; Vapnik, V. Extracting Support Data for a Given Task. 6. In Proceedings of the 1st International Conference on Knowledge & Data Mining, Montreal, QC, Canada, 20–21 August 1995; pp. 255–257. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | |
|---|---|---|
| Length overall | 1.80 | m |
| Breadth | 0.70 | m |
| Draft | 0.24 | m |
| Displacement | 75 | kg |
| Propeller diameter | 14 | cm |
| Distance between two propellers | 29 | cm |
| Max propeller revolution rate | 1200 | Rpm |
| Endurance | 12 | h |
| Parameters | Content | Characteristics |
|---|---|---|
| System of communication | VHF Wireless | 2.5 km distance |
| Image transmission | Wireless digital data link | |
| Inertial sensor | SBG Ellipse-A | |
| Motor | Servo integrated motor | 3000 rpm/min, 0.6 Nm |
| Camera | YTH-IPQ16 | IP66 protection |
| Position system | GPS | (horizontal accuracy, heading accuracy ± 0.1 degrees, pitch/roll accuracy < 1 degree, speed accuracy 0.03 m per second); Electronic compass |
| Controller board | SCM9022 | X86 Atom, Dual core 1.66 g |
| MK-SVR | PK-SVR | RBF-SVR | ||
|---|---|---|---|---|
| In training set | Surge velocity | 36 s | 37 s | 34 s |
| Sway velocity | 41 s | 44 s | 38 s | |
| Yaw rate | 40 s | 41 s | 38 s | |
| In testing set | Surge velocity | 42 s | 40 s | 43 s |
| Sway velocity | 44 s | 43 s | 46 s | |
| Yaw rate | 42 s | 41 s | 43 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, P.; Cao, Q.; Shen, Y.; Chen, M.; Ding, Y.; Cheng, H. Predicting the Motion of a USV Using Support Vector Regression with Mixed Kernel Function. J. Mar. Sci. Eng. 2022, 10, 1899. https://doi.org/10.3390/jmse10121899
Xu P, Cao Q, Shen Y, Chen M, Ding Y, Cheng H. Predicting the Motion of a USV Using Support Vector Regression with Mixed Kernel Function. Journal of Marine Science and Engineering. 2022; 10(12):1899. https://doi.org/10.3390/jmse10121899
Chicago/Turabian StyleXu, Pengfei, Qingbo Cao, Yalin Shen, Meiya Chen, Yanxu Ding, and Hongxia Cheng. 2022. "Predicting the Motion of a USV Using Support Vector Regression with Mixed Kernel Function" Journal of Marine Science and Engineering 10, no. 12: 1899. https://doi.org/10.3390/jmse10121899