
Assessment of Ship Fuel Consumption for Different Hull Roughness in Realistic Weather Conditions


Abstract
:1. Introduction
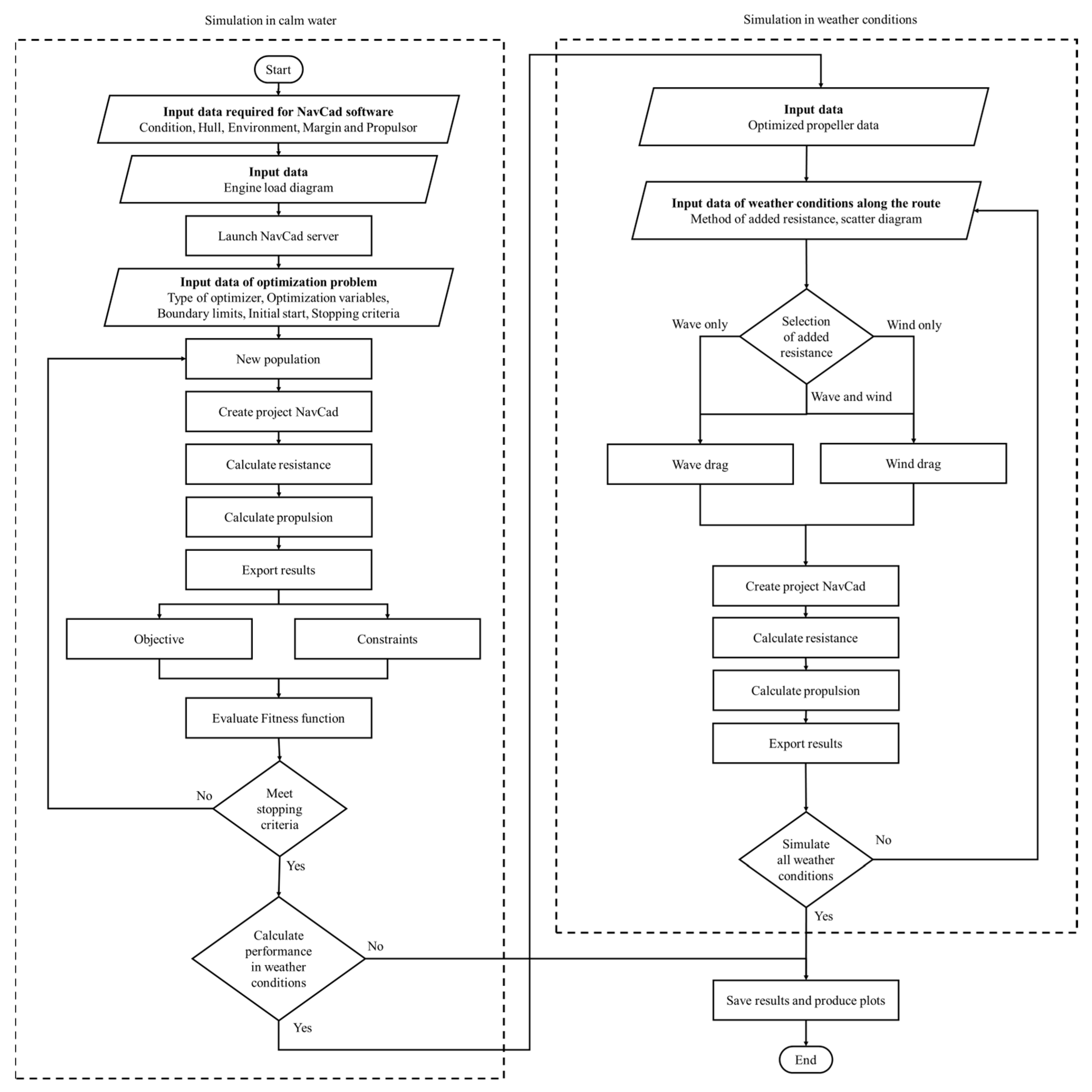
2. Numerical Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Symbol | Unit | Value | |
|---|---|---|---|---|
| Ship characteristics | Length at waterline | LWL | m | 154.00 |
| Breadth | B | m | 23.11 | |
| Draft | T | m | 10.00 | |
| Displacement | ∆ | tonne | 27,690 | |
| Service speed | Vs | knot | 14.5 | |
| Maximum speed | Vs-max | knot | 16.0 | |
| Number of propellers | - | - | 1 | |
| Type of propellers | - | - | FPP | |
| Rated power | Pmax | kW | 7140 | |
| Engine characteristics | Engine builder | - | - | MAN Energy Solutions [71] |
| Brand name | - | - | MAN | |
| Bore | B | mm | 320 | |
| Stroke | S | mm | 440 | |
| Displacement | V | liter | 4954 | |
| Number of cylinders | nc | - | 14 | |
| Rated speed | RPMmax | rpm | 750 | |
| Rated power | Pmax | kW | 7140 | |
| Speed at 14.5 knots | RPM | rpm | 714 | |
| Propeller characteristics | Series | - | - | Wageningen B-series |
| Diameter | D | m | 6 | |
| Expanded area ratio | EAR | - | 0.47 | |
| Pitch diameter ratio | P/D | - | 1.097 | |
| Gearbox ratio | GBR | - | 9.5 | |
| Number of blades | Z | - | 5 | |
| Speed at 14.5 knots | N | rpm | 75 |
3. Results
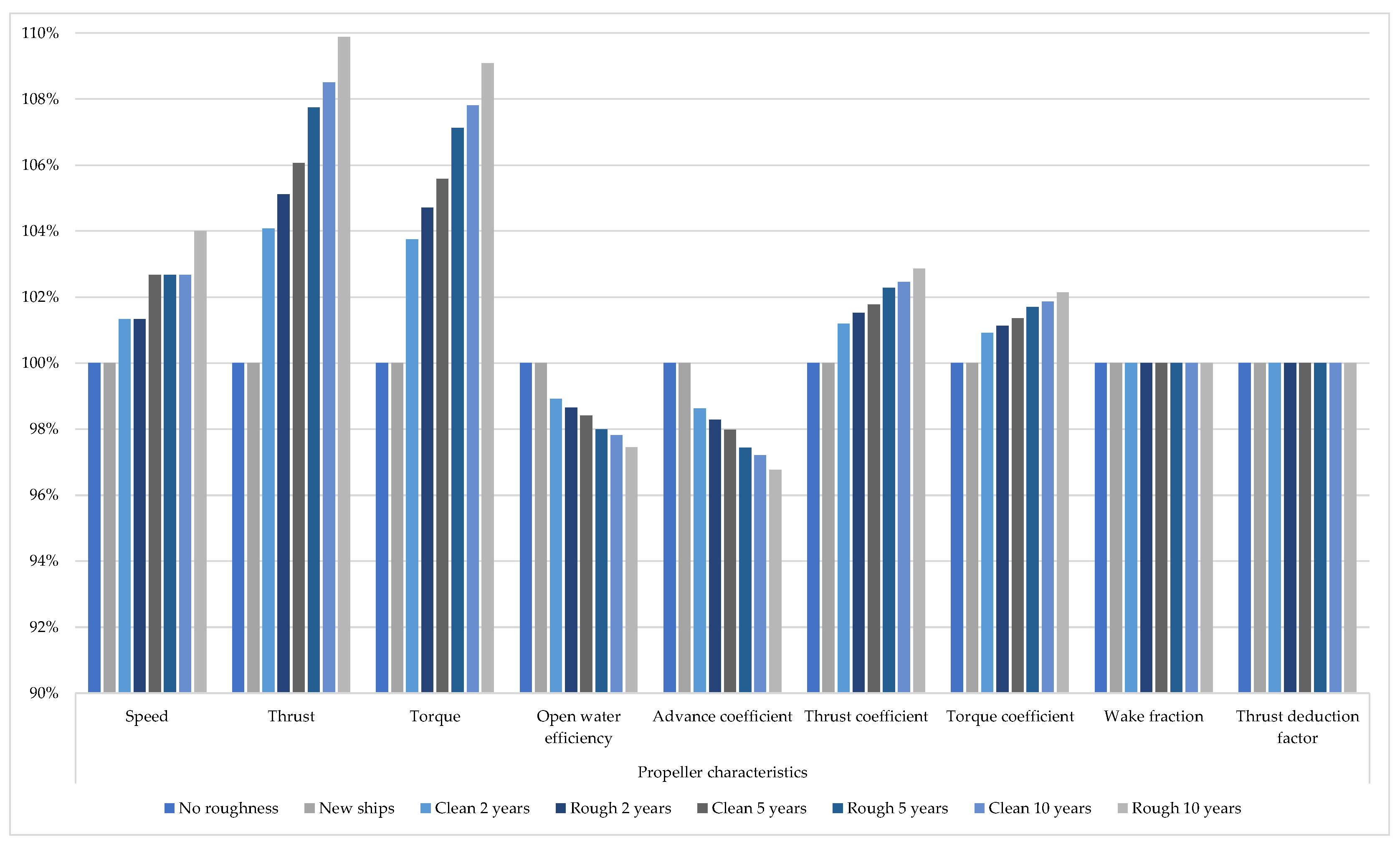
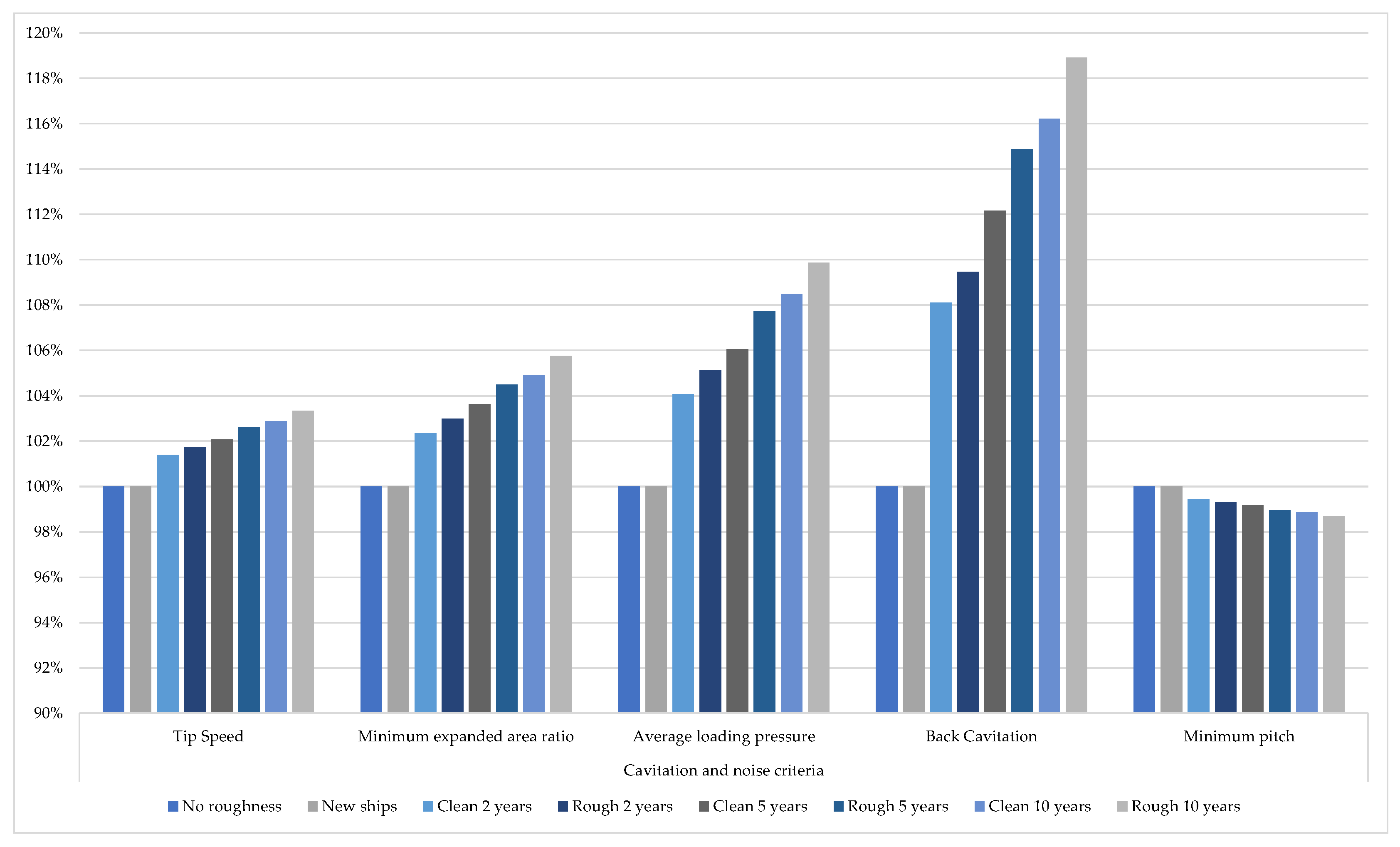
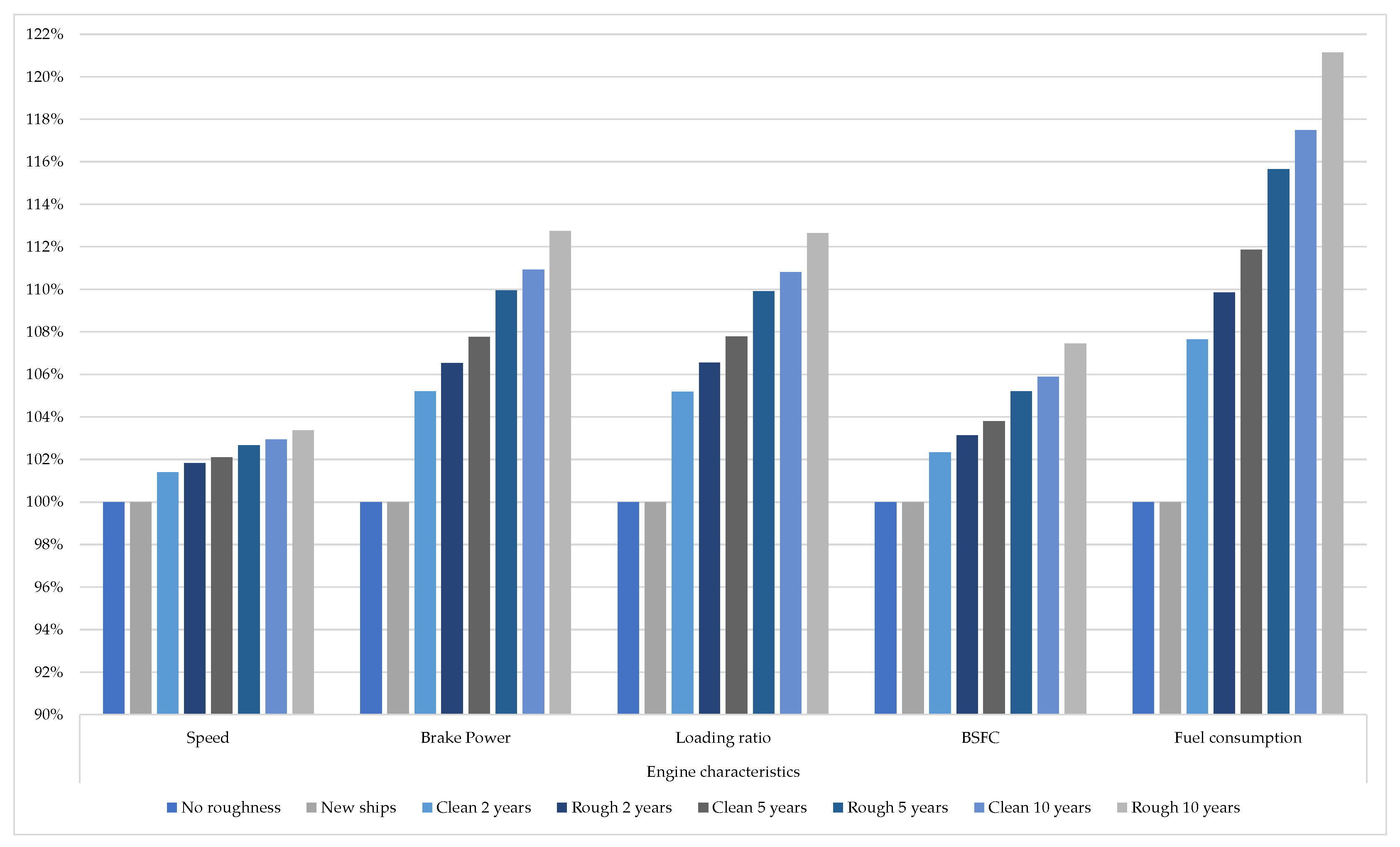
3.1. Simulation in Calm Water
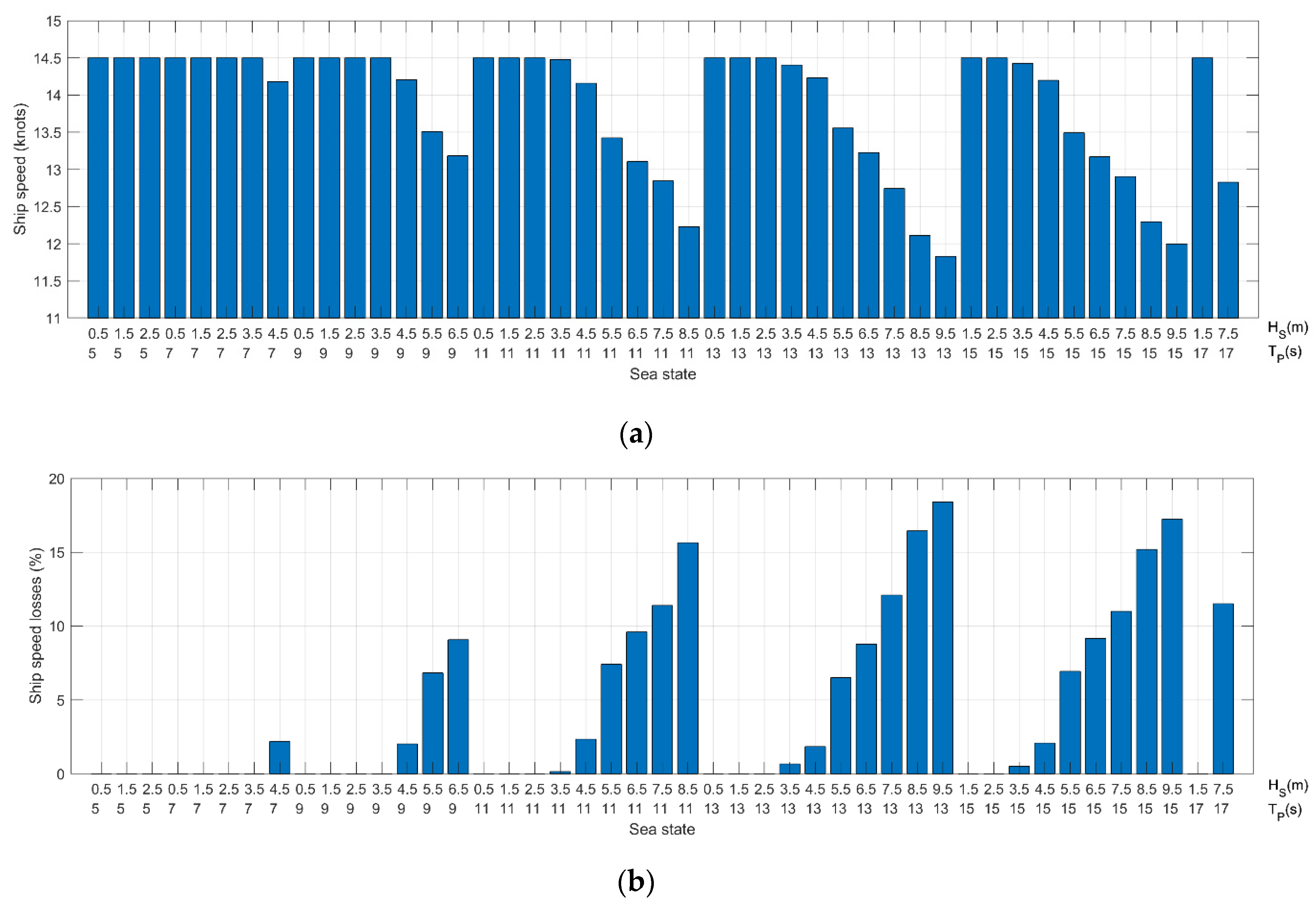
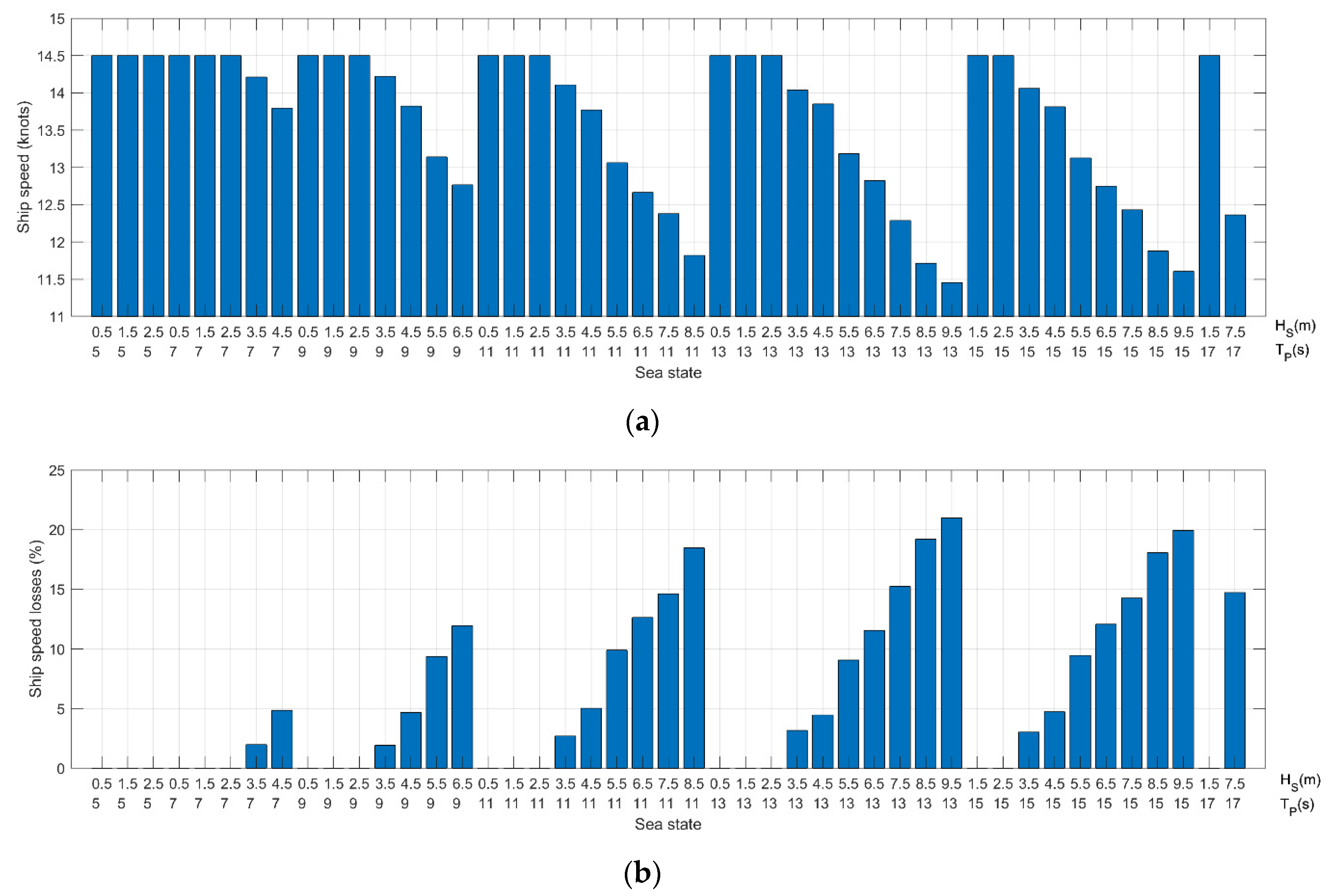
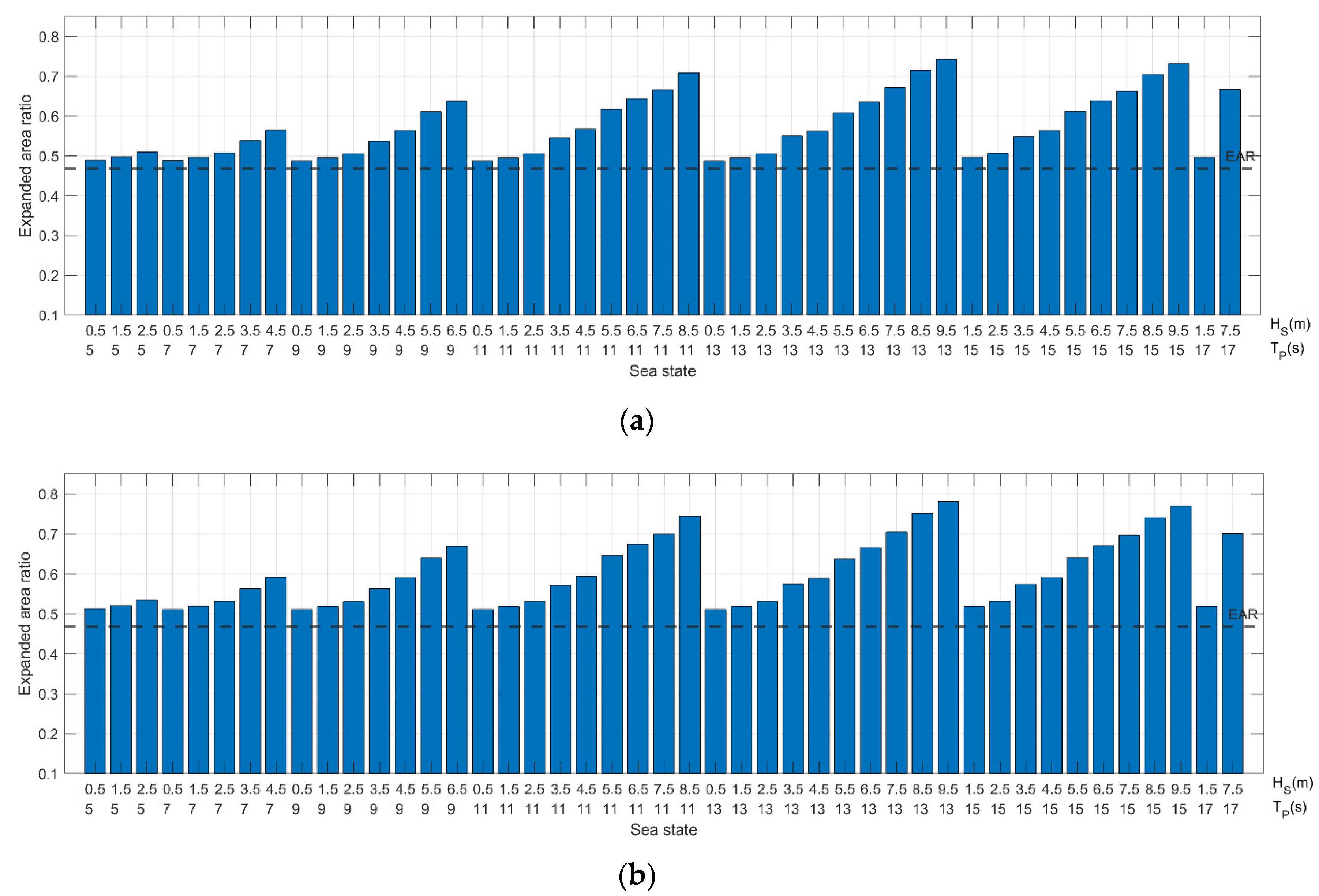
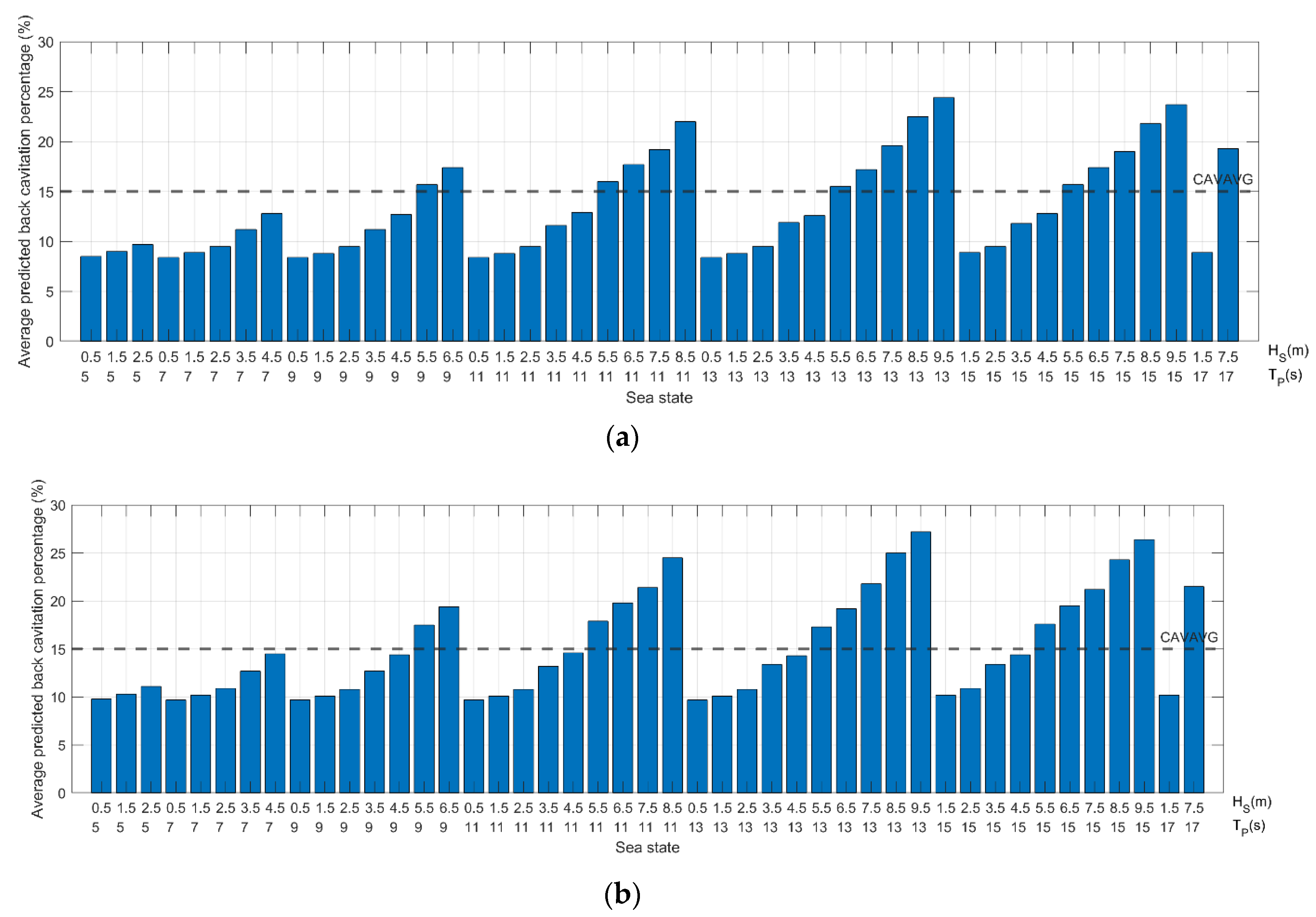
3.2. Simulation in Weather Conditions (Wave and Wind)
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ∆ | Displacement |
| ∆CF | Roughness allowance |
| 3D | Three-dimensional |
| A | Affected area of the hull and superstructure |
| AHR | Average hull roughness |
| API | Application programming interface |
| B | Breadth |
| B | Bore |
| BSFC | Brake-specific fuel consumption |
| C | Drag coefficient |
| CA | Correlation allowance |
| CAVAVG | Average predicted back cavitation percentage |
| CF | Frictional coefficient |
| CFD | Computational fluid dynamics |
| CO2 | Carbon dioxide |
| CR | Residuary resistance coefficient |
| CT | Total resistance coefficient |
| D | Propeller diameter |
| DJF | December–January–February |
| DoE | Design of experiments |
| EAR | Expanded area ratio |
| EU | European Union |
| FPP | Fixed-pitch propeller |
| GBR | Gearbox ratio |
| GHG | Greenhouse gas |
| HW | Significant wave height |
| IMO | International Maritime Organization |
| ITTC | International Towing Tank Conference |
| JA | Advance coefficient |
| KQ | Torque coefficient |
| ks | Roughness of the hull surface |
| KT | Thrust coefficient |
| LWL | Ship length at waterline |
| n | Propeller speed |
| n | Number of sea states |
| nc | Number of cylinders |
| P | Specific parameter |
| P/D | Pitch diameter ratio |
| PB | Brake power |
| Pmax | Rated power |
| PRESS | Average propeller loading pressure |
| Pw | Weighted average parameter |
| Q | Propeller torque |
| Re | Reynolds number |
| RPMmax | Rated speed |
| Rwind | Added resistance due to wind |
| S | Stroke |
| SSOcc | Occurrence of the sea state |
| t | Thrust deduction factor |
| T | Propeller thrust |
| T | Draft |
| TP | Modal wave period |
| USA | United States of America |
| V | Engine displacement |
| VA | Advance speed |
| Vs | Ship design speed |
| Vs-max | Ship maximum speed |
| w | Wake fraction |
| Z | Number of propeller blades |
| ηo | Open-water propeller efficiency |
| ηRR | Relative-rotative efficiency |
| ρair | Air density |
| ρw | Water density |
Appendix A
| Main Characteristics | Parameters | Unit | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Level of Roughness | No roughness | New ships | Clean 2 years | Rough 2 years | Clean 5 years | Rough 5 years | Clean 10 years | Rough 10 years | ||
| Roughness | [mm] | 0.00 | 0.15 | 0.30 | 0.35 | 0.40 | 0.50 | 0.55 | 0.65 | |
| Ship characteristics | Ship speed | [kn] | 14.5 | 14.5 | 14.5 | 14.5 | 14.5 | 14.5 | 14.5 | 14.5 |
| Propeller characteristics | Series | [-] | Wageningen B-series | |||||||
| Cup | [%] | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
| Diameter | [m] | 6.00 | 6.00 | 6.00 | 6.00 | 6.00 | 6.00 | 6.00 | 6.00 | |
| Expanded area ratio | [-] | 0.47 | 0.47 | 0.47 | 0.47 | 0.47 | 0.47 | 0.47 | 0.47 | |
| Pitch | [m] | 6.58 | 6.58 | 6.58 | 6.58 | 6.58 | 6.58 | 6.58 | 6.58 | |
| Speed | [RPM] | 75.00 | 75.00 | 76.00 | 76.00 | 77.00 | 77.00 | 77.00 | 78.00 | |
| Thrust | [kN] | 576.5 | 576.5 | 599.9 | 605.9 | 611.5 | 621.1 | 625.5 | 633.5 | |
| Torque | [kN.m] | 573.3 | 573.3 | 594.8 | 600.3 | 605.3 | 614.1 | 618.1 | 625.4 | |
| Open water efficiency | [%] | 59.32 | 59.32 | 58.68 | 58.52 | 58.38 | 58.13 | 58.02 | 57.81 | |
| Advance coefficient | [-] | 0.62 | 0.62 | 0.61 | 0.61 | 0.61 | 0.60 | 0.60 | 0.60 | |
| Thrust coefficient | [-] | 0.28 | 0.28 | 0.28 | 0.28 | 0.28 | 0.28 | 0.28 | 0.28 | |
| Torque coefficient | [-] | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | |
| Wake fraction | [-] | 0.38 | 0.38 | 0.38 | 0.38 | 0.38 | 0.38 | 0.38 | 0.38 | |
| Thrust deduction factor | [-] | 0.19 | 0.19 | 0.19 | 0.19 | 0.19 | 0.19 | 0.19 | 0.19 | |
| Cavitation and noise criteria | Tip Speed | [m/s] | 23.61 | 23.61 | 23.94 | 24.02 | 24.10 | 24.23 | 24.29 | 24.40 |
| Minimum expanded area ratio | [-] | 0.47 | 0.47 | 0.48 | 0.48 | 0.49 | 0.49 | 0.49 | 0.50 | |
| Average loading pressure | [kPa] | 43.57 | 43.57 | 45.34 | 45.80 | 46.21 | 46.94 | 47.27 | 47.87 | |
| Back cavitation | [%] | 7.40 | 7.40 | 8.00 | 8.10 | 8.30 | 8.50 | 8.60 | 8.80 | |
| Minimum pitch | [m] | 4978.5 | 4978.5 | 4950.4 | 4943.4 | 4937.1 | 4926.2 | 4921.3 | 4912.5 | |
| Gearbox characteristics | Gearbox ratio | [-] | 9.5 | 9.5 | 9.5 | 9.5 | 9.5 | 9.5 | 9.5 | 9.5 |
| Engine characteristics | Speed | [RPM] | 714 | 714 | 724 | 727 | 729 | 733 | 735 | 738 |
| Brake power | [kW] | 4682.3 | 4682.3 | 4925.8 | 4988.6 | 5045.9 | 5147.9 | 5194.1 | 5278.9 | |
| Loading ratio | [%] | 65.6 | 65.6 | 69 | 69.9 | 70.7 | 72.1 | 72.7 | 73.9 | |
| BSFC | [g/kW.h] | 191.8 | 191.8 | 196.3 | 197.8 | 199.1 | 201.8 | 203.1 | 206.1 | |
| Fuel consumption | [kg/nm] | 61.93 | 61.93 | 66.67 | 68.04 | 69.29 | 71.64 | 72.77 | 75.02 | |
| Item (Weighted Average) | Unit | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Level of Roughness | [-] | No roughness | New ships | Clean 2 years | Rough 2 years | Clean 5 years | Rough 5 years | Clean 10 years | Rough 10 years |
| Roughness | [mm] | 0.00 | 0.15 | 0.30 | 0.35 | 0.40 | 0.50 | 0.55 | 0.65 |
| Engine speed | [RPM] | 755.22 | 755.22 | 761.18 | 762.37 | 763.70 | 765.83 | 766.96 | 768.66 |
| Engine power | [kW] | 5800.6 | 5800.6 | 5974.9 | 6016.4 | 6054.3 | 6121.7 | 6152.2 | 6208.2 |
| Ship speed | [kn] | 14.33 | 14.33 | 14.26 | 14.24 | 14.23 | 14.20 | 14.18 | 14.16 |
| Fuel consumption | [kg/nm] | 86.35 | 86.35 | 88.73 | 89.41 | 90.28 | 92.62 | 93.47 | 95.09 |
References
- Wang, H.; Zhou, P.; Wang, Z. Reviews on current carbon emission reduction technologies and projects and their feasibilities on ships. J. Mar. Sci. Appl. 2017, 16, 129–136. [Google Scholar] [CrossRef]
- Karatuğ, Ç.; Arslanoğlu, Y.; Guedes Soares, C. Evaluation of decarbonization strategies for existing ships. In Trends in Maritime Technology and Engineering; Guedes Soares, C., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2022; pp. 45–54. [Google Scholar]
- Mallouppas, G.; Yfantis, E.A. Decarbonization in Shipping Industry: A Review of Research, Technology Development, and Innovation Proposals. J. Mar. Sci. Eng. 2021, 9, 415. [Google Scholar] [CrossRef]
- Han, S.; Lee, Y.-S.; Choi, Y.B. Hydrodynamic hull form optimization using parametric models. J. Mar. Sci. Technol. 2012, 17, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Ventura, M.; Guedes Soares, C. Integration of a voyage model concept into a ship design optimization procedure. In Towards Green Marine Technology and Transport; Guedes Soares, C., Dejhalla, R., Pavletic, D., Eds.; Taylor & Francis Group: London, UK, 2015; pp. 539–548. [Google Scholar]
- Huang, F.; Yang, C. Hull form optimization of a cargo ship for reduced drag. J. Hydrodynam. B 2016, 28, 173–183. [Google Scholar] [CrossRef]
- Cheng, X.; Feng, B.; Liu, Z.; Chang, H. Hull surface modification for ship resistance performance optimization based on Delaunay triangulation. Ocean Eng. 2018, 153, 333–344. [Google Scholar] [CrossRef]
- Tadros, M. Optimization Procedures to Minimize the Fuel Consumption of Marine Diesel Propulsion Systems. Ph.D. Thesis, Naval Architecture and Ocean Engineering, Instituto Superior Tecnico, University of Lisbon, Lisbon, Portugal, 2020. [Google Scholar]
- IMO—MEPC. Reduction of GHG emissions from ships. In Fourth IMO GHG Study 2020; IMO: London, UK, 2020; Volume 53, pp. 1689–1699. [Google Scholar]
- Abbasnia, A.; Guedes Soares, C. Fully nonlinear and linear ship waves modelling using the potential numerical towing tank and NURBS. Eng. Anal. Bound Elem. 2019, 103, 137–144. [Google Scholar] [CrossRef]
- Prpić-Oršić, J.; Vettor, R.; Faltinsen, O.M.; Guedes Soares, C. The influence of route choice and operating conditions on fuel consumption and CO2 emission of ships. J. Mar. Sci. Technol. 2016, 21, 434–457. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Papanikolaou, A. Regression analysis of experimental data for added resistance in waves of arbitrary heading and development of a semi-empirical formula. Ocean Eng. 2020, 206, 107357. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, W.; Wan, D. Hull form optimization based on calm-water wave drag with or without generating bulbous bow. Appl. Ocean Res. 2021, 116, 102861. [Google Scholar] [CrossRef]
- Zha, L.; Zhu, R.; Hong, L.; Huang, S. Hull form optimization for reduced calm-water resistance and improved vertical motion performance in irregular head waves. Ocean Eng. 2021, 233, 109208. [Google Scholar] [CrossRef]
- Wang, S.M.; Duan, F.; Li, Y.; Xia, Y.K.; Li, Z.S. An improved radial basis function for marine vehicle hull form representation and optimization. Ocean Eng. 2022, 260, 112000. [Google Scholar] [CrossRef]
- Duan, W.; Li, C. Estimation of added resistance for large blunt ship in waves. J. Mar. Sci. Appl. 2013, 12, 1–12. [Google Scholar] [CrossRef]
- Liu, S.; Shang, B.; Papanikolaou, A.; Bolbot, V. Improved formula for estimating added resistance of ships in engineering applications. J. Mar. Sci. Appl. 2016, 15, 442–451. [Google Scholar] [CrossRef]
- Park, D.-M.; Lee, J.-H.; Jung, Y.-W.; Lee, J.; Kim, Y.; Gerhardt, F. Experimental and numerical studies on added resistance of ship in oblique sea conditions. Ocean Eng. 2019, 186, 106070. [Google Scholar] [CrossRef]
- Islam, H.; Guedes Soares, C. Uncertainty analysis in ship resistance prediction using OpenFOAM. Ocean Eng. 2019, 191, 105805. [Google Scholar] [CrossRef]
- Park, D.-M.; Lee, J.; Kim, Y. Uncertainty analysis for added resistance experiment of KVLCC2 ship. Ocean Eng. 2015, 95, 143–156. [Google Scholar] [CrossRef]
- Sogihara, N.; Tsujimoto, M.; Fukasawa, R.; Hamada, T. Uncertainty analysis for measurement of added resistance in short regular waves: Its application and evaluation. Ocean Eng. 2020, 216, 107823. [Google Scholar] [CrossRef]
- Tezdogan, T.; Shenglong, Z.; Demirel, Y.K.; Liu, W.; Leping, X.; Yuyang, L.; Kurt, R.E.; Djatmiko, E.B.; Incecik, A. An investigation into fishing boat optimisation using a hybrid algorithm. Ocean Eng. 2018, 167, 204–220. [Google Scholar] [CrossRef] [Green Version]
- Seok, W.; Kim, G.H.; Seo, J.; Rhee, S.H. Application of the Design of Experiments and Computational Fluid Dynamics to Bow Design Improvement. J. Mar. Sci. Eng. 2019, 7, 226. [Google Scholar] [CrossRef] [Green Version]
- Faltinsen, O.M.; Minsaas, K.J.; Liapis, N.; Skjørdal, S.O. Prediction of resistance and propulsion of a ship in a seaway. In Proceedings of the 13th Symposium on Naval Hydrodynamics, Tokyo, Japan, 6–10 October 1980; pp. 505–529. [Google Scholar]
- Taskar, B.; Yum, K.K.; Steen, S.; Pedersen, E. The effect of waves on engine-propeller dynamics and propulsion performance of ships. Ocean Eng. 2016, 122, 262–277. [Google Scholar] [CrossRef]
- Duan, W.Y.; Tang, S.X.; Chen, J.K. Power and speed prediction of KVLCC2 in head waves based on TEBEM. Ocean Eng. 2022, 249, 110811. [Google Scholar] [CrossRef]
- Islam, H.; Guedes Soares, C.; Liu, J.; Wang, X. Propulsion power prediction for an inland container vessel in open and restricted channel from model and full-scale simulations. Ocean Eng. 2021, 229, 108621. [Google Scholar] [CrossRef]
- Taskar, B.; Andersen, P. Comparison of added resistance methods using digital twin and full-scale data. Ocean Eng. 2021, 229, 108710. [Google Scholar] [CrossRef]
- Moreira, L.; Vettor, R.; Guedes Soares, C. Neural Network Approach for Predicting Ship Speed and Fuel Consumption. J. Mar. Sci. Eng 2021, 9, 119. [Google Scholar] [CrossRef]
- Gkerekos, C.; Lazakis, I.; Theotokatos, G. Machine learning models for predicting ship main engine Fuel Oil Consumption: A comparative study. Ocean Eng. 2019, 188, 106282. [Google Scholar] [CrossRef]
- Tadros, M.; Ventura, M.; Guedes Soares, C. Optimization of the performance of marine diesel engines to minimize the formation of SOx emissions. J. Mar. Sci. Appl. 2020, 19, 473–484. [Google Scholar] [CrossRef]
- Mocerino, L.; Guedes Soares, C.; Rizzuto, E.; Balsamo, F.; Quaranta, F. Validation of an Emission Model for a Marine Diesel Engine with Data from Sea Operations. J. Marine. Sci. Appl. 2021, 20, 534–545. [Google Scholar] [CrossRef]
- Islam, H.; Guedes Soares, C. Effect of trim on container ship resistance at different ship speeds and drafts. Ocean Eng. 2019, 183, 106–115. [Google Scholar] [CrossRef]
- Shivachev, E.; Khorasanchi, M.; Day, S.; Turan, O. Impact of trim on added resistance of KRISO container ship (KCS) in head waves: An experimental and numerical study. Ocean Eng. 2020, 211, 107594. [Google Scholar] [CrossRef]
- Li, J.; Duan, W.; Chen, J.; Ma, S.; Zhang, Y. A study on dynamic trim optimization of VLCC oil tanker in wind and waves. Ocean Eng. 2022, 253, 111270. [Google Scholar] [CrossRef]
- Islam, H.; Sutulo, S.; Guedes Soares, C. Aerodynamic Load Prediction on a Patrol Vessel Using Computational Fluid Dynamics. J. Mar. Sci. Eng. 2022, 10, 935. [Google Scholar] [CrossRef]
- Vettor, R.; Prpiæ-Oršiæ, J.; Guedes Soares, C. Impact of wind loads on long-term fuel consumption and emissions in trans-oceanic shipping. Brodogradnja 2018, 69, 15–28. [Google Scholar] [CrossRef]
- Vitali, N.; Prpić-Oršić, J.; Guedes Soares, C. Coupling voyage and weather data to estimate speed loss of container ships in realistic conditions. Ocean Eng. 2020, 210, 106758. [Google Scholar] [CrossRef]
- Liu, S.; Loh, M.; Leow, W.; Chen, H.; Shang, B.; Papanikolaou, A. Rational processing of monitored ship voyage data for improved operation. Appl. Ocean Res. 2020, 104, 102363. [Google Scholar] [CrossRef]
- Vettor, R.; Guedes Soares, C. Development of a ship weather routing system. Ocean Eng. 2016, 123, 1–14. [Google Scholar] [CrossRef]
- Vettor, R.; Tadros, M.; Ventura, M.; Guedes Soares, C. Route planning of a fishing vessel in coastal waters with fuel consumption restraint. In Maritime Technology and Engineering 3; Guedes Soares, C., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2016; pp. 167–173. [Google Scholar]
- Vettor, R.; Tadros, M.; Ventura, M.; Guedes Soares, C. Influence of main engine control strategies on fuel consumption and emissions. In Progress in Maritime Technology and Engineering; Guedes Soares, C., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2018; pp. 157–163. [Google Scholar]
- Smith, F.; Colvin, G. Magnetic Track. U.S. Patent Application No. 2014/0077.587; U.S. Patent and Trademark Office: Washington, DC, USA, 6–7, 20 March 2014. [Google Scholar]
- Daidola, J.C. Effects of Hull and Control Surface Roughness on Ship Maneuvering. In SNAME Maritime Convention, SNAME-SMC-2019-2004; SNAME: Tacoma, WA, USA, 2019. [Google Scholar]
- Anish. What Is a Hull Roughness Analyzer and How is a Ship’s Hull Roughness Measured? Available online: https://www.marineinsight.com/guidelines/what-is-a-hull-roughness-analyzer-and-how-is-a-ships-hull-roughness-measured/ (accessed on 5 March 2022).
- Stenson, P.A.; Kidd, B.; Chen, H.L.; Finnie, A.A.; Ramsden, R. Predicting the impact of hull roughness on the frictional resistance of ships. In Proceedings of the International Conference on Computational and Experimental Marine Hydrodynamics (MARHY 2014), Chennai, India, 3–4 December 2014. [Google Scholar]
- Song, C.; Cui, W. Review of Underwater Ship Hull Cleaning Technologies. J. Mar. Sci. Appl. 2020, 19, 415–429. [Google Scholar] [CrossRef]
- Haase, M.; Zurcher, K.; Davidson, G.; Binns, J.R.; Thomas, G.; Bose, N. Novel CFD-based full-scale resistance prediction for large medium-speed catamarans. Ocean Eng. 2016, 111, 198–208. [Google Scholar] [CrossRef] [Green Version]
- Demirel, Y.K.; Turan, O.; Incecik, A. Predicting the effect of biofouling on ship resistance using CFD. Appl. Ocean Res. 2017, 62, 100–118. [Google Scholar] [CrossRef] [Green Version]
- Yuan, C.; Yao, X.; Bai, X. Influence of surface roughness changes caused by fouling on ship resistance based on CFD analysis. In Proceedings of the International Offshore and Polar Engineering Conference, Sapporo, Japan, 10–15 June 2018. [Google Scholar]
- Song, S.; Demirel, Y.K.; Atlar, M. An investigation into the effect of biofouling on the ship hydrodynamic characteristics using CFD. Ocean Eng. 2019, 175, 122–137. [Google Scholar] [CrossRef] [Green Version]
- Farkas, A.; Song, S.; Degiuli, N.; Martić, I.; Demirel, Y.K. Impact of biofilm on the ship propulsion characteristics and the speed reduction. Ocean Eng. 2020, 199, 107033. [Google Scholar] [CrossRef]
- Song, S.; Demirel, Y.K.; Atlar, M. Penalty of hull and propeller fouling on ship self-propulsion performance. Appl. Ocean Res. 2020, 94, 102006. [Google Scholar] [CrossRef]
- García, S.; Trueba, A.; Boullosa-Falces, D.; Islam, H.; Guedes Soares, C. Predicting ship frictional resistance due to biofouling using Reynolds-averaged Navier-Stokes simulations. Appl. Ocean Res. 2020, 101, 102203. [Google Scholar] [CrossRef]
- Sanz, D.; García, S.; Trueba, A.; Trueba-Castañeda, L.; Islam, H.; Guedes Soares, C.; Boullosa-Falces, D. Numeric analysis of the biofouling impact on the ship resistance with ceramic coating on the hull. In Trends in Maritime Technology and Engineering; Guedes Soares, C., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2022; pp. 443–449. [Google Scholar]
- Demirel, Y.K.; Song, S.; Turan, O.; Incecik, A. Practical added resistance diagrams to predict fouling impact on ship performance. Ocean Eng. 2019, 186, 106112. [Google Scholar] [CrossRef]
- Uzun, D.; Demirel, Y.K.; Coraddu, A.; Turan, O. Time-dependent biofouling growth model for predicting the effects of biofouling on ship resistance and powering. Ocean Eng. 2019, 191, 106432. [Google Scholar] [CrossRef]
- Tadros, M.; Vettor, R.; Ventura, M.; Guedes Soares, C. Effect of propeller cup on the reduction of fuel consumption in realistic weather conditions. J. Mar. Sci. Eng. 2022, 10, 1039. [Google Scholar] [CrossRef]
- Vettor, R.; Guedes Soares, C. Detection and Analysis of the Main Routes of Voluntary Observing Ships in the North Atlantic. J. Navig. 2015, 68, 397–410. [Google Scholar] [CrossRef] [Green Version]
- HydroComp. NavCad: Reliable and Confident Performance Prediction. HydroComp Inc.: NH, USA. Available online: https://www.hydrocompinc.com/solutions/navcad/ (accessed on 30 January 2019).
- Tadros, M.; Ventura, M.; Guedes Soares, C. Design of Propeller Series Optimizing Fuel Consumption and Propeller Efficiency. J. Mar. Sci. Eng. 2021, 9, 1226. [Google Scholar] [CrossRef]
- Tadros, M.; Ventura, M.; Guedes Soares, C. Optimization procedures for a twin controllable pitch propeller of a ROPAX ship at minimum fuel consumption. J. Mar. Eng. Technol. 2022. [Google Scholar] [CrossRef]
- Tadros, M.; Ventura, M.; Guedes Soares, C. Optimum design of a container ship’s propeller from Wageningen B-series at the minimum BSFC. In Sustainable Development and Innovations in Marine Technologies; Georgiev, P., Guedes Soares, C., Eds.; Taylor & Francis Group: London, UK, 2020; pp. 269–274. [Google Scholar]
- Tadros, M.; Ventura, M.; Guedes Soares, C. Towards Fuel Consumption Reduction Based on the Optimum Contra-Rotating Propeller. J. Mar. Sci. Eng. 2022, 10, 1657. [Google Scholar] [CrossRef]
- Holtrop, J. A statistical re-analysis of resistance and propulsion data. Int. Shipbuild. Prog. 1984, 31, 272–276. [Google Scholar]
- Holtrop, J. A Statistical Resistance Prediction Method With a Speed Dependent Form Factor. In Proceedings of the Scientific and Methodological Seminar on Ship Hydrodynamics (SMSSH ‘88), Varna, Bulgaria, 1 October 1988; Bulgarian Ship Hydrodynamics Centre: Varna, Bulgaria, 1988; pp. 1–7. [Google Scholar]
- Islam, H.; Ventura, M.; Guedes Soares, C.; Tadros, M.; Abdelwahab, H.S. Comparison between empirical and CFD based methods for ship resistance and power prediction. In Trends in Maritime Technology and Engineering; Guedes Soares, C., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2022; pp. 347–357. [Google Scholar]
- Holtrop, J.; Mennen, G.G.J. An approximate power prediction method. Int. Shipbuild. Prog. 1982, 29, 166–170. [Google Scholar] [CrossRef]
- ITTC. 1978 ITTC Performance Prediction Method. In Proceedings of the 28th ITTC, Wuxi, China, 17–22 September 2017. [Google Scholar]
- ITTC. Skin Friction and Turbulence Stimulation. In Proceedings of the 8th ITTC, Madrid, Spain, 15–23 September 1957. [Google Scholar]
- MAN Diesel & Turbo. 32/44CR Project Guide—Marine Four-Stroke Diesel Engines Compliant with IMO Tier II; MAN Diesel & Turbo: Augsburg, Germany, 2017. [Google Scholar]
- Aertssen, G. The Effect of Weather on Two Classes of Container Ships in the North Atlantic. Nav. Archit. 1975, 1, 11–13. [Google Scholar]
- Taylor, D.W. The Speed and Power of Ships: A Manual of Marine Propulsion; U.S. Government Printing Office: Washington, DC, USA, 1943. [Google Scholar]
- Carlton, J. Marine Propellers and Propulsion, 2nd ed; Butterworth-Heinemann: Oxford, UK, 2012. [Google Scholar]
- Oosterveld, M.; Van Oossanen, P. Further computer-analyzed data of the Wageningen B-screw series. Int. Shipbuild. Prog. 1975, 22, 251–262. [Google Scholar] [CrossRef] [Green Version]
- Burrill, L.C.; Emerson, A. Propeller cavitation: Further tests on 16in. propeller models in the King’s College cavitation tunnel. Int. Shipbuild. Prog. 1963, 10, 119–131. [Google Scholar] [CrossRef]
- Blount, D.L.; Fox, D.L. Design Considerations for Propellers in a Cavitating Environment. Mar. Technol. 1978, 15, 144–178. [Google Scholar] [CrossRef]
- MacPherson, D.M. Reliable Propeller Selection for Work Boats and Pleasure Craft: Techniques Using a Personal Computer. Paper presented at the SNAME Fourth Biennial Power Boat Symposium, NJ, USA, 1991; Available online: https://repository.tudelft.nl/islandora/object/uuid:1f90a28f-a06a-4eea-bfd8-88f5258651f1?collection=research (accessed on 13 November 2022).
- Tadros, M.; Ventura, M.; Guedes Soares, C. Surrogate models of the performance and exhaust emissions of marine diesel engines for ship conceptual design. In Maritime Transportation and Harvesting of Sea Resources; Guedes Soares, C., Teixeira, A.P., Eds.; Taylor & Francis Group: London, UK, 2018; pp. 105–112. [Google Scholar]
- Tadros, M.; Ventura, M.; Guedes Soares, C. Optimization procedure to minimize fuel consumption of a four-stroke marine turbocharged diesel engine. Energy 2019, 168, 897–908. [Google Scholar] [CrossRef]
- Tadros, M.; Vettor, R.; Ventura, M.; Guedes Soares, C. Effect of different speed reduction strategies on ship fuel consumption in realistic weather conditions. In Trends in Maritime Technology and Engineering; Guedes Soares, C., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2022; pp. 553–561. [Google Scholar]
- ITTC. Specialist Committee on Surface Treatment—Final report and recommendations to the 26th ITTC. In Proceedings of the 26th ITTC, Rio de Janeiro, Brazil, 28 August–3 September 2011; Volume II. [Google Scholar]
- Andersson, J.; Oliveira, D.R.; Yeginbayeva, I.; Leer-Andersen, M.; Bensow, R.E. Review and comparison of methods to model ship hull roughness. Appl. Ocean Res. 2020, 99, 102119. [Google Scholar] [CrossRef]
- Vettor, R.; Guedes Soares, C. Assessment of the storm avoidance effect on the wave climate along the main North Atlantic routes. J. Navig. 2016, 69, 127–144. [Google Scholar] [CrossRef] [Green Version]
- Vettor, R.; Guedes Soares, C. A global view on bimodal wave spectra and crossing seas from ERA-interim. Ocean Eng. 2020, 210, 107439. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tadros, M.; Vettor, R.; Ventura, M.; Guedes Soares, C. Assessment of Ship Fuel Consumption for Different Hull Roughness in Realistic Weather Conditions. J. Mar. Sci. Eng. 2022, 10, 1891. https://doi.org/10.3390/jmse10121891
Tadros M, Vettor R, Ventura M, Guedes Soares C. Assessment of Ship Fuel Consumption for Different Hull Roughness in Realistic Weather Conditions. Journal of Marine Science and Engineering. 2022; 10(12):1891. https://doi.org/10.3390/jmse10121891
Chicago/Turabian StyleTadros, Mina, Roberto Vettor, Manuel Ventura, and C. Guedes Soares. 2022. "Assessment of Ship Fuel Consumption for Different Hull Roughness in Realistic Weather Conditions" Journal of Marine Science and Engineering 10, no. 12: 1891. https://doi.org/10.3390/jmse10121891