1. Introduction
Global maritime accidents have caused serious social and ecological damage. Studies have confirmed that human factors are the main causes of maritime accidents [
1,
2,
3], especially those navigational accidents related to seafarers’ operations [
4]. The British Maritime Investigation Bureau reported that 65% of ship collision accidents are caused by improper lookout, and 73% of collision accidents involve improper or poor use of radar [
5]. Accurately describing and evaluating the effects of unsafe acts on maritime accidents is critical to making practical accident prevention and control options [
6,
7].
The human factor is an essential issue in safety management. Some classic approaches for human factor analysis include Skill-Rule-Knowledge (S-R-K) taxonomy [
8], Generic Error Modeling System (GEMS) [
8], Swiss Cheese Model (SCM) [
9], Cognitive Reliability Error Analysis method (CREAM) [
10], Human Factor Analysis, and Classification System (HFACS) [
11]. Among them, Rasmussen’s S-R-K taxonomy and the Reason’s GEMS are the most typical ones that classify human factors at the individual level, Hollnagel’s CREAM focuses on human error in the work environment considering common performance conditions. HFACS is an integrated approach that considers the causation and the effects of unsafe acts under the organizational environment based on the SCM and Software, Hardware, Environment, and Liveware methods [
12,
13]. According to the development of the human factor analysis approaches, the studies have been conducted from human error gradually transferring into unsafe acts [
13,
14].
Unsafe acts, as a highly concerning human error, are closely related to maritime accidents [
15,
16]. The research on unsafe acts in maritime accidents has attracted significant attention from the marine industry and academic fields. International Maritime Organization (IMO) issued guidelines for the application of the human element analyzing for (HEAP) to the IMO rule-making process (MSC-MEPC.2/Circ.13). Academic research has been conducted into the unsafe acts of seafarers as a primary cause of maritime accidents [
17]. For example, decision and skilled errors were considered the leading causes of collision and grounding accidents [
18]. Some unsafe acts, such as lack of communication, fatigued ship handling, and collision regulation violations, were the important elements associated with higher collision occurrence rates for oil tankers [
19]. Using the HFACS, Celik and Cebi [
20] discovered that skill-based behavioral errors and poor communication by seafarers were the main factors leading to an accident in which a ship exploded. Akyuz and Celik [
21] improved the HFACS analysis framework based on the Swiss cheese model and summarized ten types of frequent unsafe acts. Ung [
22] and Yang et al. [
23] used the CREAM to identify the working environments and individual factors most closely associated with hazards. Akhtar et al. [
24] identified fatigued ship handling as the main cause of grounding accidents. In the causal analysis and research of maritime accidents, much research has focused on collision accidents as typical cases and identified the causes attributed to them [
25,
26]. These included unsafe human factors in collision accidents, especially unsafe acts [
27], such as decision errors [
12] and inappropriate lookout [
28]. Reviewing the research as mentioned earlier, studies have focused mainly on describing the unsafe acts in maritime accidents. However, the dynamic evolution of unsafe acts to maritime accidents has not been comprehensively discussed.
Developing the evolutionary process of unsafe acts related to maritime accidents is a critical issue worthy of additional attention [
29,
30]. The Bayesian Network (BN) is a graphical technique expressing complex probabilistic relationships, especially in non-precise information estimates prone to uncertainty [
31,
32], it is widely used in the probabilistic occurrence estimation and quantitative risk assessment of maritime accidents or incidents [
33,
34,
35,
36,
37,
38,
39]. The BN can be incorporated with systematic approaches for processing the evolution, dynamic variation, and complex dependencies of maritime accidents, such as Accident Map (AcciMap) [
34], System Theoretic Process Analysis (STPA) [
40,
41], and Functional Resonance Analysis Method (FRAM) [
28,
42]. Moreover, a Dynamic Bayesian Network (DBN) is an improved technique for modeling a time series or dynamic process by expanding BNs [
43,
44,
45]. Combined with the advantage of BN, the DBN can (1) combine graph theory with probability theory to form the topological structure of causal links and achieve a graphical and intuitive description of the breeding, germination, and development of maritime accidents [
43]; (2) obtain a posteriori probability within a context of information uncertainty by updating the prior probability after obtaining some data information in the case of limited accident sample data and asymmetric information, thus realizing the identification of critical causes of maritime accidents; (3) learn the data parameters to fit the network structure that most conforms to the data logic, and realize the deduction and decision-making of the accident process [
44] under the condition of having a large number of historical accident data samples.
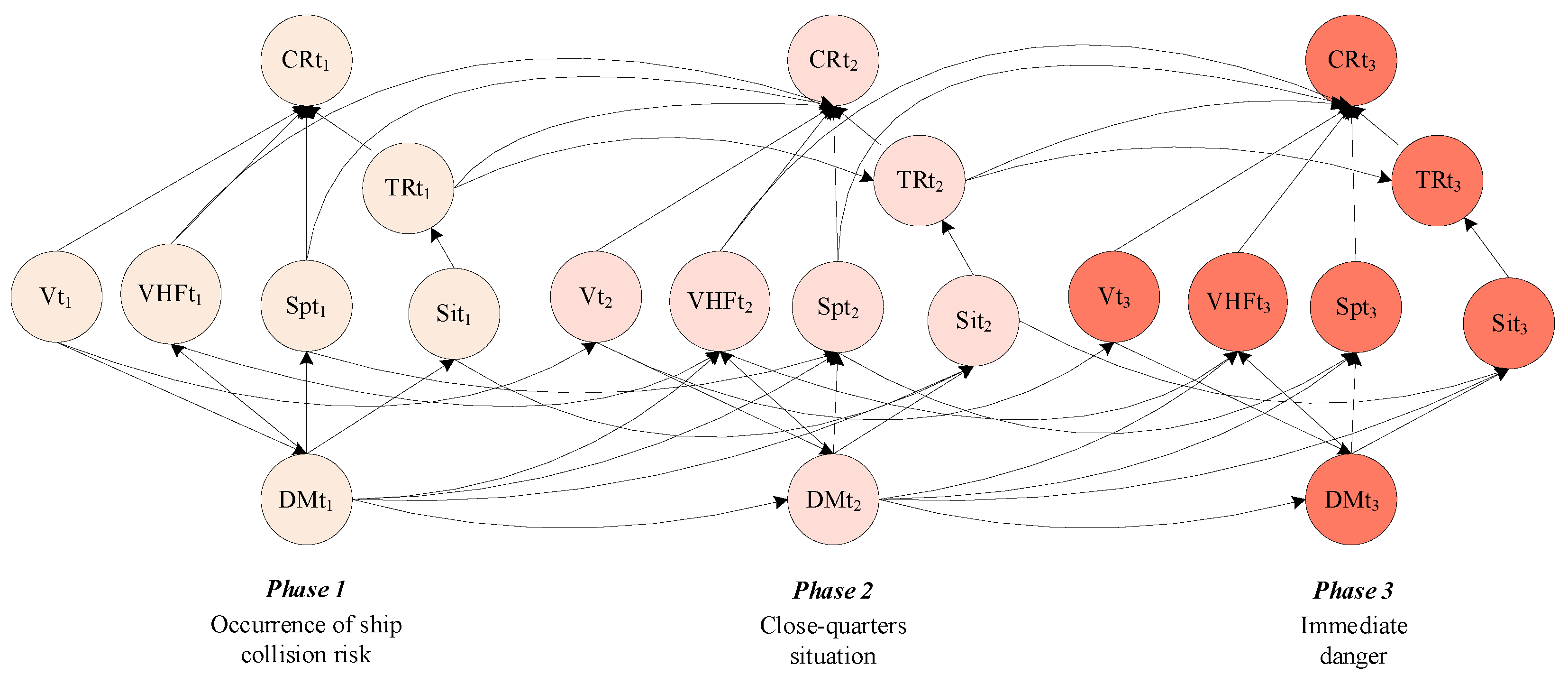
The aim of this study is to propose a framework for the probabilistic analysis of maritime accidents caused by the unsafe acts of seafarers by incorporating navigation simulation and DBN modeling. The typical navigational accident-collision is chosen as the case to interpret the proposed framework. The formation process of ship collision risk has been decomposed into three phases: the occurrence of ship collision risk (phase 1), close-quarters situation (phase 2), and immediate danger (phase 3). First, we investigated the unsafe acts most likely to have caused collision accidents from 207 global collision accident investigation reports by using the text mining technique. Second, we designed a simulation experiment to collect data on the navigation ship-handling behaviors of the simulator during the process of ship collision risks from the occurrence of ship collision risk (phase 1) to the close-quarters situation (phase 2) and immediate danger (phase 3). Then, we proposed a probabilistic model using DBN to describe the three phases of the ship collision risks concerning the navigation simulation experiment data. Furthermore, we explored the accident causal chain related to ship collision accidents by sensitivity analysis. The proposed framework can be used (1) to describe the process by which the seafarer’s behavior can cause maritime accidents; and (2) to address the bottleneck in related research caused by a lack of data on the acts of seafarers.
The remainder of this paper is organized as follows.
Section 2 introduces the framework and associated methods for probabilistic analysis of ship collision risk caused by the unsafe acts of seafarers.
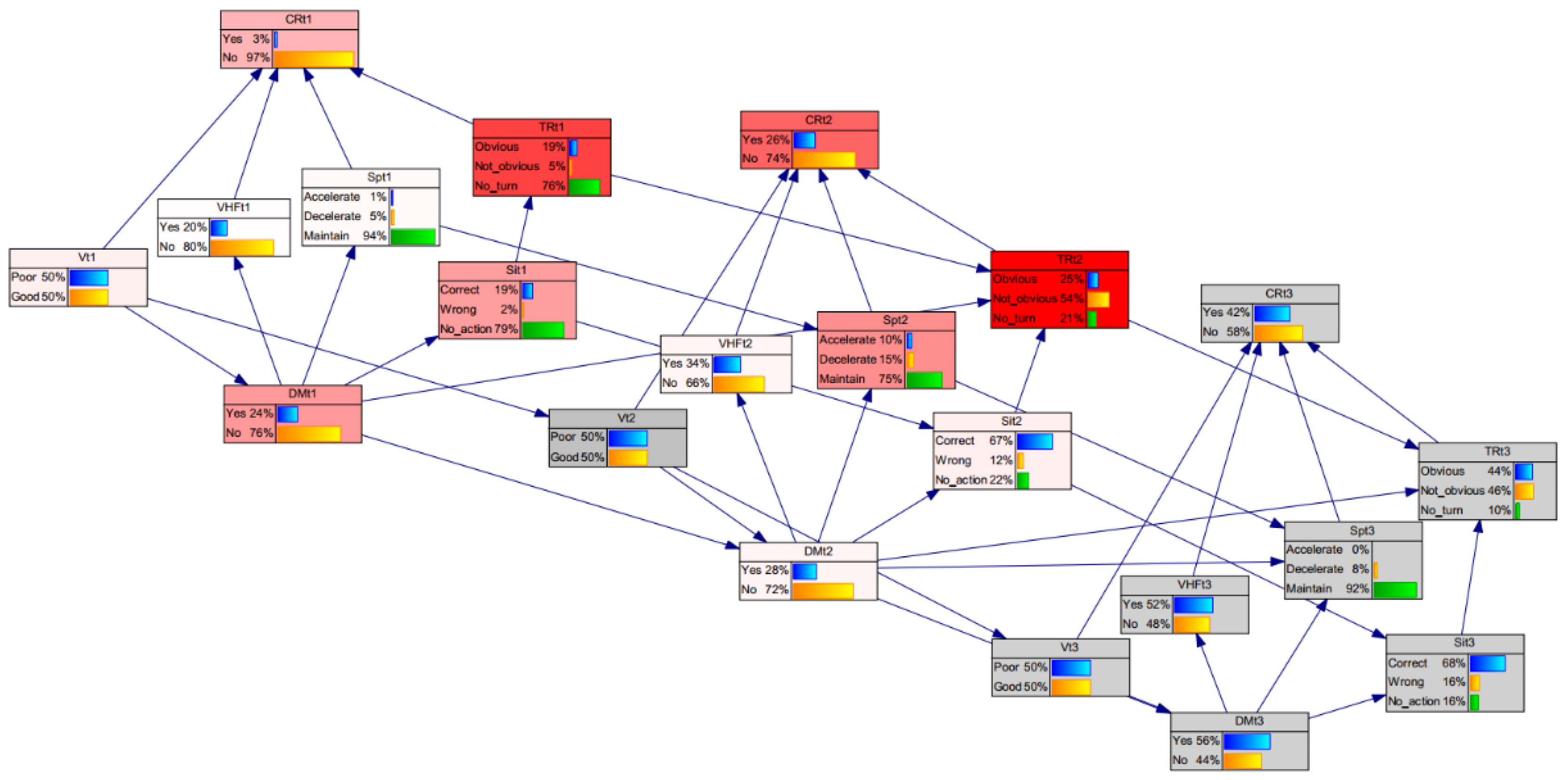
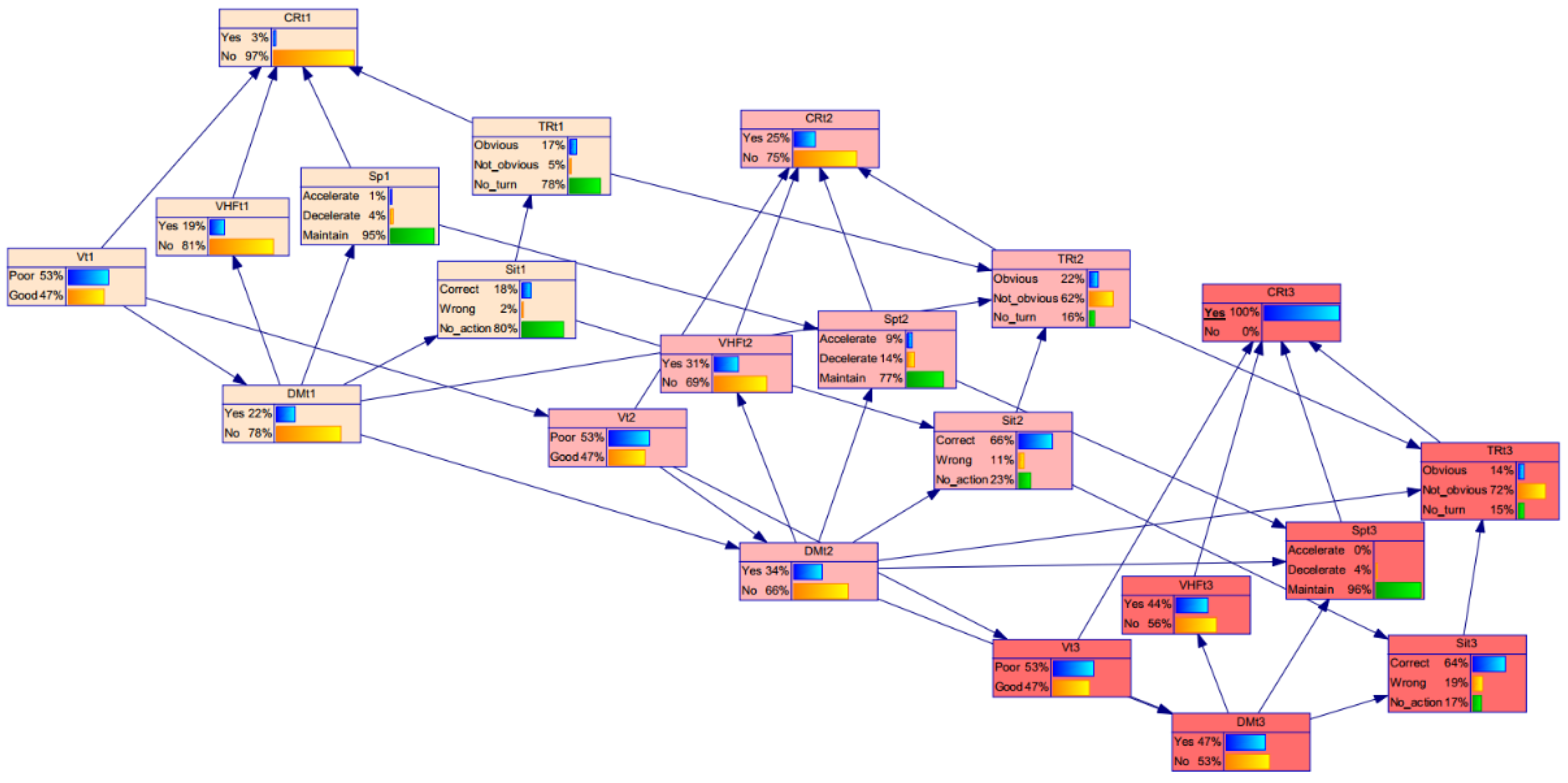
Section 3 interprets the probabilistic ship collision risk modeling process by a DBN.
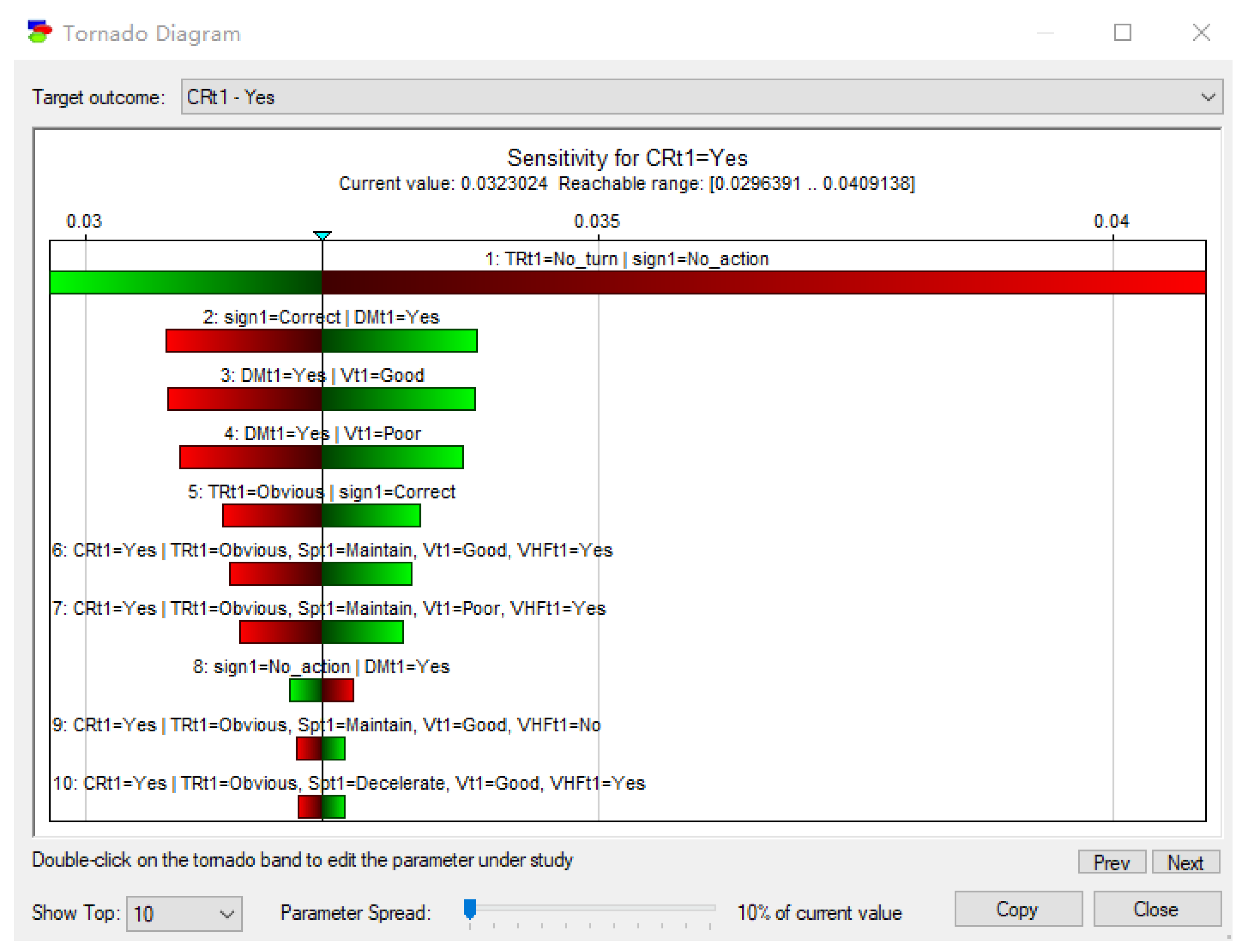
Section 4 discusses the causal chain of ship collision accidents. Finally,
Section 5 summarizes this study and proposes relevant conclusions.
5. Conclusions
This paper proposes a framework for probabilistic analysis of maritime accidents caused by the unsafe acts of seafarers by incorporating navigation simulation and dynamic Bayesian network modeling. Ship collision is chosen as the case for multiple analyses of the causal networks of collisions caused by seafarers’ unsafe acts, which revealed the occurrence of collision accidents and their evolutionary mechanisms. Based on data analyzed in historical collision accident investigation reports, the acts of seafarers collected through a navigation simulator, and a dynamic Bayesian model, this study analyzes the key unsafe acts and dynamic causal processes that affect ship safety and yielded notable results.
The framework is applied to explore the causal chain of collision accidents caused by the unsafe acts of seafarers. Results demonstrate that poor navigation environment (poor visibility) and unsafe seafarers’ acts were the primary causes of collisions. The acts–accident causal chain reveals that failure to undertake a substantial alteration of course (turning range >30°), failure to perform VHF communication, failure to decelerate, and in particular, unawareness of the avoidance turning range, which had been rarely mentioned in the literature, were the main causes of the collision. This study has practical importance for the prevention of maritime accidents. According to the findings, further research can be conducted on topics such as differences in behavior across various experimental conditions and the outcomes of interventions to reduce the unsafe acts of seafarers. For example, by changing the scenes of the simulation experiment, such as in narrow or open waters, it can be recognized whether there are differences in the seafarers’ ship-handling behaviors under different scenes. In addition, the relationship between individual characteristics and unsafe behaviors can be determined by combining corresponding psychological tests in subsequent experiments.
Improvements can also be made in future experiments. First, the navigation simulator can effectively reproduce the navigation risk situation to collect data of seafarers’ ship handling behaviors under the risk situation, but can only reproduce a limited number of scenes, such as some specific ship types and tonnage, as well as specific waterways. Secondly, only seafarers’ unsafe acts and visibility in navigation are considered in this paper. In further study, other factors such as insufficient management and ship equipment failures mentioned in the maritime accident investigation reports can be considered to improve the causal chain. Moreover, the validity of DBNs depends on the reliability of prior knowledge given to them, and minor mistakes in the prior knowledge may distort the results of the entire network. Collecting more experimental sample data is necessary to obtain more reliable prior beliefs in future modeling.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}