4.2. Analysis of Ship Collision Probability
Considering the relationship between the total number of accidents and their grading, at least one accident can be assigned to the level of each environmental factor as far as possible.
Table 3 shows the grading of the key levels of navigational environment risk.
The
of the impact factors was acquired through data collection and reviewing of the natural occurrence of key navigational impact factors at different levels, numerical calculation, simulation, or reasonable hypotheses (
Table 4).
The probability of the natural occurrence variation of impact factors with regard to the level was plotted through the statistical analysis and calculations of the case study. The characteristics of the navigational environment system of the study area are shown in
Figure 4.
The water environmental characteristics of the study area are shown in
Figure 4. It is clear that the inherent probabilities of wind, visibility, and the channel crossing ratio were all negatively related to the levels of the impact factors. This conformed to the hydrological environment features of the study area since the probability of bad weather was relatively low. The inherent probabilities of channel width, ship density, and traffic flow fluctuated with the levels, peaking at around Level 3. This agreed with the channel and traffic flow characteristics of the study area.
The impact probabilities of environmental impact factors were calculated according to Equation (5), and the results are shown in
Table 5.
The variations in the impact probability with the impact factor level were plotted through analysis of the probability of natural occurrence in the case study (
Figure 5).
The effects of the navigational environment on ship collision accidents in the study area are presented in
Figure 5. It is clear that the impact probabilities fluctuated greatly according to the levels rather than having a single linear relationship. According to the formula of impact probability, the impact probabilities of the impact factors were related to both the probability of natural occurrence and the frequency of occurrence. The impact probability of the wind impact first increased and then decreased with an increase in level, reaching a peak at Level 4 and having a broad interval between Levels 4 and 5. The impact probabilities of visibility, channel crossing ratio, channel width, and ship density all peaked at Level 2 and were low between Levels 3 and 4. The impact probability of traffic flow changed slightly with level, with a moderate value in relation to the other navigational environment impact factors.
In the expression of the impact probabilities, three properties of each navigational environment impact factor were recognized: SDS (level of indicator), the probability of natural occurrence, and the impact probability calculated with the Bayes formula. When analyzing these three properties, it was possible to conclude that none of them had consistent changes in subjective cognition. Regarding subjective cognition, impact probability was positively correlated with the level, while the probability of natural occurrence was negatively correlated. In fact, such relationships were fluctuating rather than linear.
After calculating and analyzing the impact probabilities of each accident case, their distribution remained unknown. Nevertheless, using the statistics of all possible navigational environment conditions (i.e., the whole sample), the accident case impact probability, and the full sample, the impact probability distribution diagram was drawn, as shown in
Figure 6.
It can be seen in
Figure 6 that when the impact probabilities were sorted, the impact probability distribution of the accident cases was mostly concentrated in the upper part of the whole sample, which is consistent with the usual subjective perception of risk; that is, the higher the impact probability, the higher the probability that an accident will occur.
4.3. Uncertainty Evolution Laws
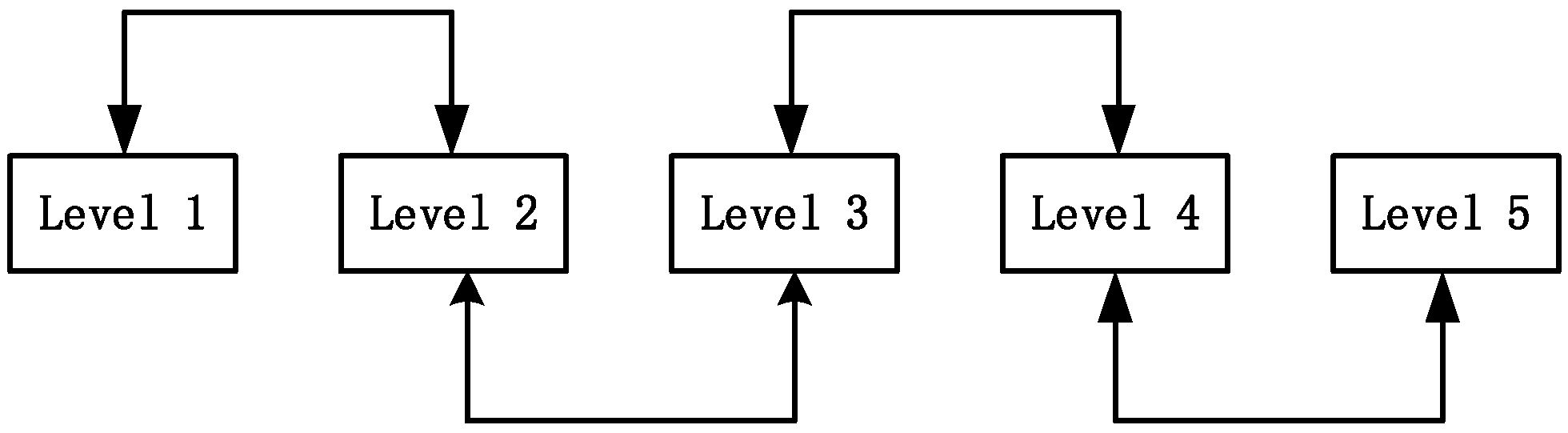
According to the uncertainty evolution rules shown in
Figure 2, the uncertainty states of the case study were calculated. They ranged from 143 (only 1 accident) to 728 (8 accidents).
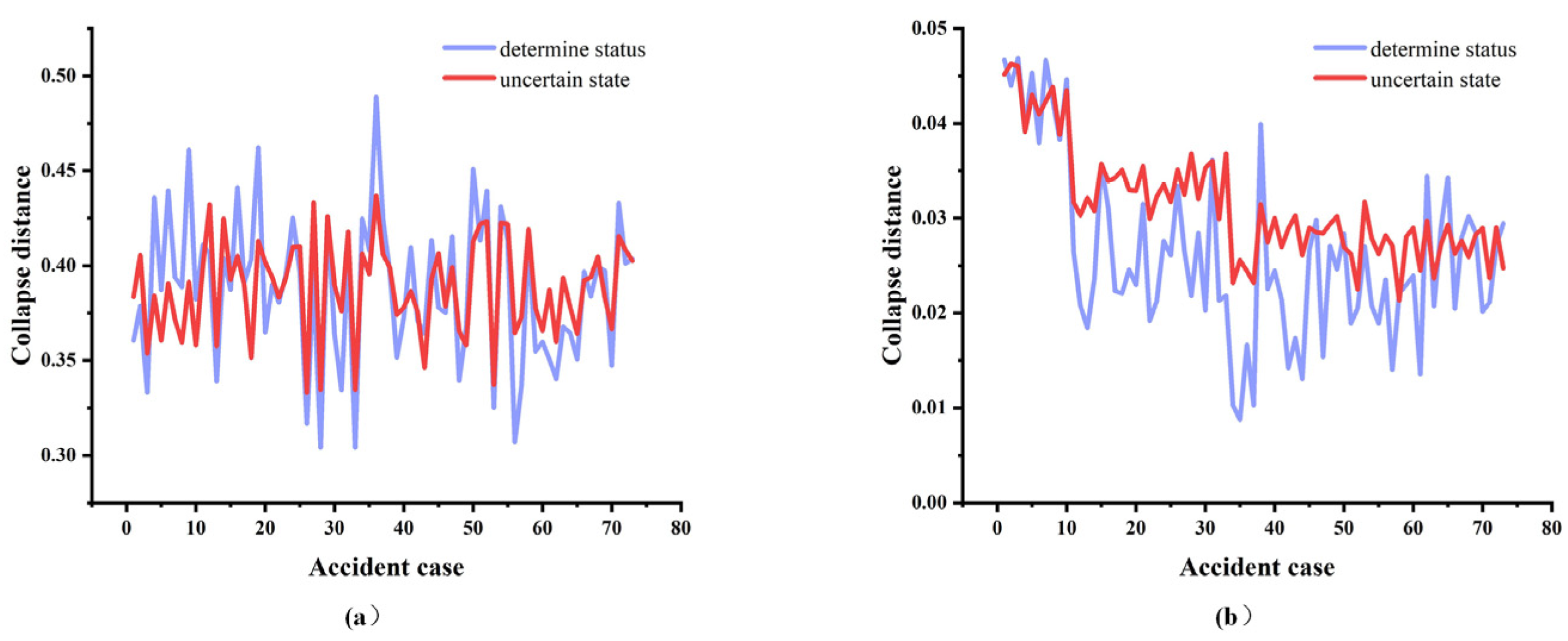
The collapse distances of the certain and uncertain states were calculated according to Equations (15) and (16):
It can be seen in
Figure 7 that the collapse distances of the certain states, which were based on the probability of natural occurrence, were concentrated between 0.3 and 0.5, while the average collapse distances of the uncertain states were concentrated between 0.35 and 0.45. The collapse distance of the certain states based on impact probability was 0.01–0.05, while the average collapse distance of the uncertain state was 0.25–0.45. Compared with the certain variation in the navigational environment impact factors, the uncertain variation in the inherent probability showed a higher concentration, and the collapse distance decreased. Similarly, the uncertain variation on the impact probability had a higher concentration, but the collapse distance increased compared with that of the certain state.
The evolutions in the navigational environment impact factors
and
were calculated according to Equations (17) and (18). Their relationship is plotted in
Figure 8.
According to conventional risk management theory, accident risk is related to both the consequence and probability of occurrence. In this study, only major accidents with risks proportional to the probability of occurrence were chosen under the premise of ignoring the consequences. In other words, the risk was greater when the probability of occurrence, or the impact probability, was higher.
In
Figure 8, it is possible to see that among the 73 ship collision accidents, there were 7 in the first quadrant, 24 in the second quadrant, 30 in the third quadrant, and 12 in the fourth quadrant.
It can be seen in
Figure 7 and
Figure 8 that when comparing the uncertainty variation in the inherent probability to the certainty variation of the navigational environment impact factors, it showed a higher concentration with a decrease in the collapse distance. Similarly, the uncertain variation on the impact probability had a higher concentration, while the collapse distance increased compared with that of the certain state.
The relationship between
and
is plotted according to the collapse distances of the probability of natural occurrence and the impact probability in
Figure 9.
According to both
Figure 9 and
Table 6, when one navigational environment impact factor was constant, the uncertainty evolution laws of the navigation environment were different from those when all impact factors changed. For example, when the wind was constant, the danger zone was the smallest during the uncertainty evolution, which proved that wind was the primary navigational environment impact factor of uncertainty evolution, and consequently, the system became further away from collapse when the wind was constant.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}