1. Introduction
Because of the great advantages in terms of operating automatically in the deep-sea environments, autonomous underwater vehicles (AUVs) equipped with multiple thrusters play an important role in many tasks, including the detection of marine resources, seafloor mapping, and crashed aircraft search [
1,
2,
3]. As AUVs operate in the unknown and complicated deep-sea environment, safety is one of the important issues to be considered [
4]. Fault tolerant control (FTC) is the key technology to ensure the safety of AUVs [
5]. Thrusters are the main power consumers on an AUV, and they are also the components that experience the heaviest loading and are thus the most prone to faults [
6]. The failure of a thruster directly affects the safety of an AUV operating in deep areas [
7]. Therefore, fault tolerant control for AUV thrusters is one of the current research hotspots in this field [
6]. This paper focuses on fully actuated AUVs. Fully actuated AUVs equipped with manipulators have unique capabilities to complete missions, such as grasping or cutting [
8].
Nowadays, two main FTC methods exist, that is, passive fault tolerant control (PFTC) and active fault-tolerant control (AFTC) [
9]. The former can deal with some classes of faults specified and considered during the controller design process, but the fault tolerant control performance is poor for faults that are not of the specified class. As for the AFTC, it has attracted much attention in the past decades because of its feasibility and effectiveness to deal with unknown faults [
10].
In the field of AUVs, AFTC is mainly divided into two types: AFTC based on thrust reallocation, and adaptive FTC [
11]. The former is based on the premise of known fault information. However, in a complex marine environment, the dynamic performance of an AUV varies with the environment and is disturbed by random currents, so it is difficult to obtain accurate fault diagnosis results sufficiently quickly to compensate for the fault. Thus, this method has limitations in AUV fault tolerant control [
12]. The adaptive FTC approach treats faults as a generalized uncertainty and then uses adaptive strategies to estimate its upper bounds along with its disturbances [
13]. It is also suitable for vehicles such as AUVs that move in complex environments [
14]. Adaptive FTC has developed rapidly and achieved good research results in recent years [
15,
16]. For AUVs subject to ocean current disturbances and modelling uncertainty, researchers have investigated a virtual closed-loop adaptive FTC method, which avoids serious chattering phenomena in control outputs. Su et al. [
17] proposed an event-triggered adaptive FTC scheme, which solves the trajectory tracking control problem for AUVs with actuator faults and model uncertainties.
In the fault-tolerant control of AUVs, there are problems with system dynamic model uncertainty and external disturbances [
16]. The adaptive FTC method based on observer estimation is suitable for moving vehicles in complex environments. The observer has a good effect in dealing with nonlinear dynamics due to disturbances and faults [
18,
19], and the so-called extended state observer (ESO) has been considered as an effective way to actively compensate for uncertainty and disturbances [
20,
21]. The key idea of ESO is that system uncertainties and disturbances are considered as an added or extended state of the system, and then all the states including the extended one will be estimated accurately and quickly by the ESO.
In recent years, ESO has been effectively applied in many fields [
22]. In [
22], a nonsingular fast terminal sliding mode control (NFTSMC) based on a third-order fast finite-time extended state observer was proposed for the trajectory tracking of AUVs with various hydrodynamic uncertainties and external disturbances. Specifically, ref. [
22] constructed the extended state variable according to the velocity information and constructed a third-order FFTESO to realize the finite-time estimation of the extended state variable. Another typical example is that Li proposed robust fault-tolerant control for a spacecraft system based on a finite-time ESO (FTESO) [
23], where the FTESO and controller design shared a non-singular terminal sliding mode surface (NTSMS). The proposed control scheme was continuous with the property of restraining chattering. However, in the research on fault-tolerant control of fully actuated AUV thrusters based on the above methods [
23], it was found that the control law derived theoretically from the AUV had singularities, and from the experimental results, the control output chattering was serious, which would lead to energy consumption increases.
Motivated by the mentioned-above discussion, this paper studies the FTC problem based on FTESO for a fully actuated AUV in the presence of current disturbances, thruster faults, and dynamic model uncertainty. In this paper, an improved FTC method based on FTESO is proposed, which aims to reduce the energy consumption caused by the chattering of the control signal under the premise of ensuring a high tracking accuracy. The main contributions of this paper are as follows.
(1) In a previous approach [
23], the design of FTESO and the controller share an NTSMS, but this paper uses two sliding mode surfaces respectively for the FTESO and the controller. In the design of FTESO in this paper, the integral sliding mode surface (ISMS) was used to replace the NTSMS, so that the coefficient of the generalized uncertainty term after the derivation of the sliding mode surface was 1, that is, the generalized uncertainty term was directly used in the design of the control law. The estimated value of the uncertain item replaces the real value. This is different to the approach of [
23], which requires the estimated value to remove the fractional power term of the velocity error to obtain the real value. In particular, when the velocity error term tends to zero, the method in this paper effectively suppresses the fluctuation of the generalized uncertainty term and avoids the appearance of singular points.
(2) To design an FTESO based on ISMS, this paper replaces NTSMS with a non-singular fast terminal sliding mode surface (NFTSMS) in the design of a fault-tolerant controller. That is, the generalized uncertainty term estimated by FTESO is applied to the newly designed NFTSMS to derive the control law. This avoids the pseudo-inverse term of the velocity error with the fractional power that appears in the control gain of the method in [
23], thus, it can effectively suppress the chattering of the control variable, thereby reducing the energy consumption.
(3) The FTESO-based fault-tolerant control (FTESO − FTC) method proposed in this paper has a good effect in reducing energy consumption, but it has the problem of reducing the tracking accuracy. Therefore, this paper adds a parameter adjustment method (PAM).
The remainder of this paper is structured as follows.
Section 2 presents a mathematical model, notations, and some useful lemmas. In
Section 3, the ISMS-based FTESO is designed and analyzed. The NFTSMS-based FTC design and convergence analysis and the PAM for AUV thruster control are described in
Section 4. In
Section 5, comparative simulations through the ODIN AUV were carried out to validate the effectiveness of the proposed method. Finally, some concluding statements are given in
Section 6.
3. FTESO Design Based on ISMS
This section explains the design ideas and implementation process of the FTESO in this paper, and then analyzes the convergence of the FTESO proposed in this paper.
3.1. Design Ideas and Implementation Process of FTESO
To compensate for the generalized uncertainty term combining ocean current disturbances, AUV thruster faults, and dynamic model uncertainty, an FTESO method based on integral sliding mode surface (ISMS) is proposed in this paper. Firstly, ISMS is constructed based on the tracking error. Then, the control system of the AUV is obtained by derivation of the established sliding mode surface. Finally, an extended state observer is used to estimate the generalized uncertainty to obtain the FTESO in this paper.
First, this paper selects an ISMS as follows [
28]:
where
is the designed integral sliding mode surface,
is the tracking error,
is the first derivative of the tracking error, and
is a constant value parameter. The meanings of the relevant symbols in the formulas are shown in
Section 2.
By differentiation of the ISMS in Equation (12), noting that
, we find that the state Equation (7) becomes the following:
To simplify Equation (13), we define , , .
Using the above-mentioned notation, Equation (14) is given by the following:
To use the ESO technique to estimate and compensate for the lumped disturbances or uncertainties, a new state variable is defined as , and an extended state variable is defined with . We suppose is unknown but bounded, that is, there is a positive constant , such that .
Then, the mathematic model of the AUV control system governed by (14) will be extended as follows:
Let and be the observation values of and in the above extended system, respectively, and denote as the observation error of the integral sliding mode surface .
The fast finite-time extended state observer (FTESO) is designed as follows:
where the gain parameters satisfy
,
,
and
.
As a part of the proposed FTESO, is utilized to estimate the generalized uncertainty term in (14). Although the actual value of is unavailable, its observation value can be obtained by the above FTESO. The analysis and proof that perfectly tracks the actual fault in finite time is described below.
3.2. FTESO Convergence Analysis
Based on the above-constructed observer, the following will analyze the convergence of the observer’s estimation error according to the Lyapunov theory.
Define another auxiliary variable
. Combined with Equations (15)–(18), the dynamic error of the proposed FTESO can be obtained as follows:
The stability and convergence of the proposed observer (17) and (18) are stated as the following theorem.
Theorem 1. Considering the AUV state space equation in (7) under the assumptions, design FTESO as (17) and (18), and select an appropriate gain to satisfy the constraints, then the observation errorconverges to the following regionin a finite time:
Proof of Theorem 1. First introduce another auxiliary state variable:
Obviously, if the new auxiliary state variables converge to the origin in a finite time, the observation errors and will also converge to the origin in a finite time.
According to Lemma 2 and Proof of Theorem 1 in [
23], the trajectory of the proposed FTESO (20) is fast finite-time uniformly ultimately bounded stable. This also implies that the observation errors of FTESO
and
will converge to a small region of the origin in the finite time
.
The observation error gradually decreases with time and finally enters the domain:
where
,
,
,
and
are arbitrary constants. Then, the observation error
of the generalized uncertainty is theoretically bounded, and this bound is assumed to be
. Note that
is bounded under the assumption that
is bounded. Then, the observation error
eventually converges to the domain
within a finite time
. □
Remark 1. Compared with [23], the integral sliding mode surface is used to replace the non-singular terminal sliding mode surface in the design of the extended state observer (17) and (18) in this paper. In this way, the coefficient of the generalized uncertainty term in the derivative of the sliding mode surface does not include the fractional power term of the velocity error and is 1. Therefore, after the generalized uncertainty term of AUV is estimated by the extended state observer, its estimated value is directly used to replace the true value in the design of the control law, and it is not necessary to remove the fractional power term of the degree error from the estimated value of the observer to obtain the true value. The method in this paper can effectively suppress the amplification and fluctuation of the generalized uncertainty term and reduce chattering. 5. Simulation and Analysis
To verify the effectiveness of the method proposed in this paper, this paper uses ODIN AUV [
31] to conduct trajectory tracking control simulation experiments in the simulated ocean current environment. This section first introduces the preparation of the simulation experiment. Then, the comparison and simulation verifications between FTESO − FTC − APAM and FTESO − FTC and previous method in [
23] are carried out.
5.1. Preparations for Simulation Experiments
5.1.1. Introduction of ODIN AUV
In this paper, ODIN AUV was selected as the simulated vehicle. At present, this AUV has been used as a research object in many literature works for simulation experiments, such as [
31,
32]. ODIN AUV is an open-frame underwater vehicle with four lateral thrusters and four vertical thrusters, and its model parameters are presented in [
33]. In the simulation, the initial state of the ODIN AUV is set as
and
. Furthermore, it is assumed that the thruster amplitude limits are ±200 N.
5.1.2. Desired Trajectory
In this simulation, ODIN AUV is controlled to track a spiral trajectory to test the performance of the proposed control scheme, in comparison with the controller in [
23]. The desired spiral trajectory is described as:
,
,
,
.
5.1.3. Simulate Current Disturbance
Based on the current simulation method given in the literature [
24], in this paper, a first-order Gauss–Markov process was used to simulate the ocean current, and the specific expression is shown as follows:
where
is the simulated current value;
is Gaussian white noise (mean 1.5 and variance 1);
; two angles involved in ocean currents are
and
;
is generated by the sum of Gaussian noise with mean 0 and variance 50, and
.
5.1.4. Model Uncertainty and Fault Simulation
This paper considers inevitable model uncertainty. In the simulations, 30% modelling uncertainty was considered, i.e., the parameters of ODIN AUV in the controller were only 70% of the nominal system dynamics. The thruster faults generally include the incipient thruster fault, abrupt thruster fault, etc. [
34]. In this paper, two different thruster fault simulation methods were used to conduct the simulation experiments. The specific abrupt thruster fault was described, as Equation (36), which indicates that the thruster is healthy from the 0th s to 20th s, and then the magnitude of the thruster fault persists until the end of the simulation. However, the controller does not know this fault a priori.
The mathematical description of different fault degrees under an abrupt fault is given as follows:
where a 30% fault degree is expressed as
; when the fault degree is 50%,
.
5.1.5. Control Parameters
This paper involves multiple parameters, and the result of the parameter selection affects the control effect. The following is a brief introduction to each parameter selection method.
- 1.
Parameter selection in sliding surface
When designing the FTESO, the parameter of the ISMS is selected, . When designing the controller, the parameters of the NFTSMS are selected as follows: .
- 2.
FTESO parameter selection
According to reference [
23], the specific parameters in the observer are
.
- 3.
FTC parameter selection
The control parameters are determined by trial and error, given as follows: and are constants, and is determined by PAM instead of a constant value. The specific design of the adaptive parameter is shown as (33), where , , , , .
5.2. Comparative Simulation Verification
In order to verify the effectiveness of the FTESO − FTC − PAM proposed in this paper in reducing the energy consumption of fully actuated AUVs, this paper adopts the fault-tolerant control method proposed in [
23], in which the FTESO and the controller share a terminal sliding surface to carry out comparative simulation experiments.
There are two types of fault: abrupt fault and incipient fault, and the thruster fault degree is divided into three kinds: 0, 30%, and 50%. In the simulation experiments, it was found that the simulation results of the abrupt and incipient fault types are similar under the same fault degree. Therefore, the fault type of the thruster in this paper is chosen as the abrupt fault.
To validate the performance of the proposed FTESO − FTC − PAM for fully actuated AUV, three cases were considered in this subsection.
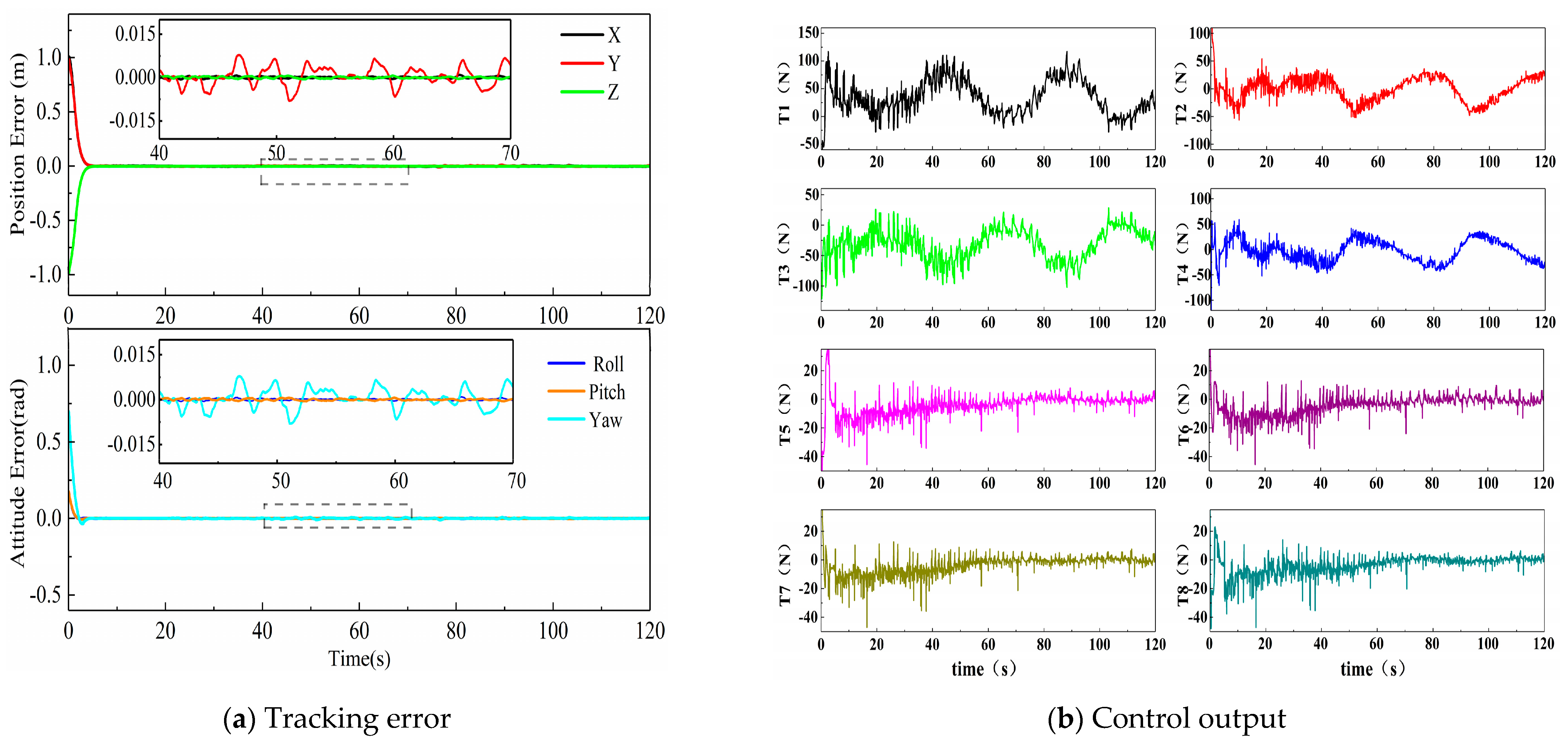
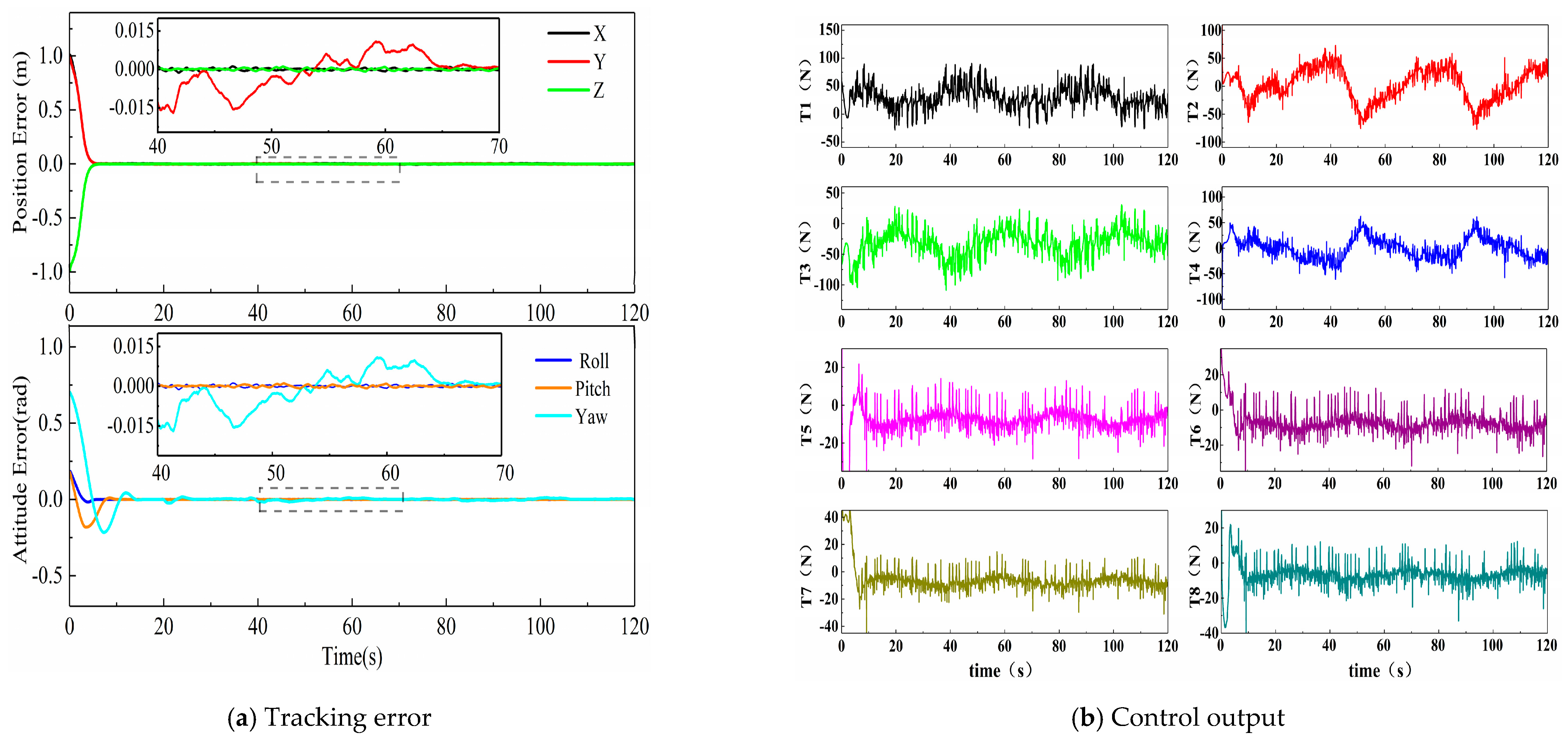
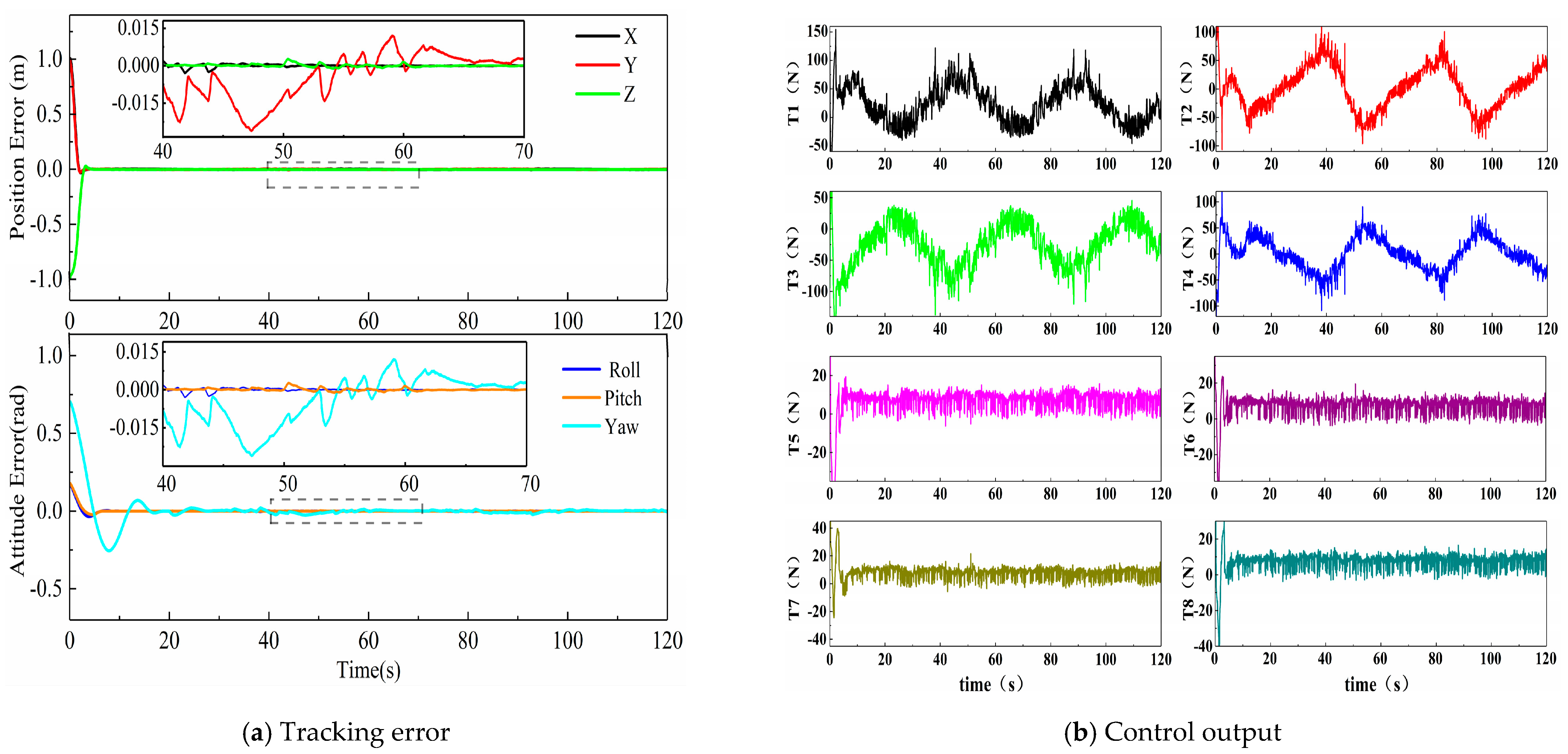
Case 1: 30% fault degree at thruster T1.
Case 2: 50% fault degree at thruster T2.
Case 3: no fault at any thruster.
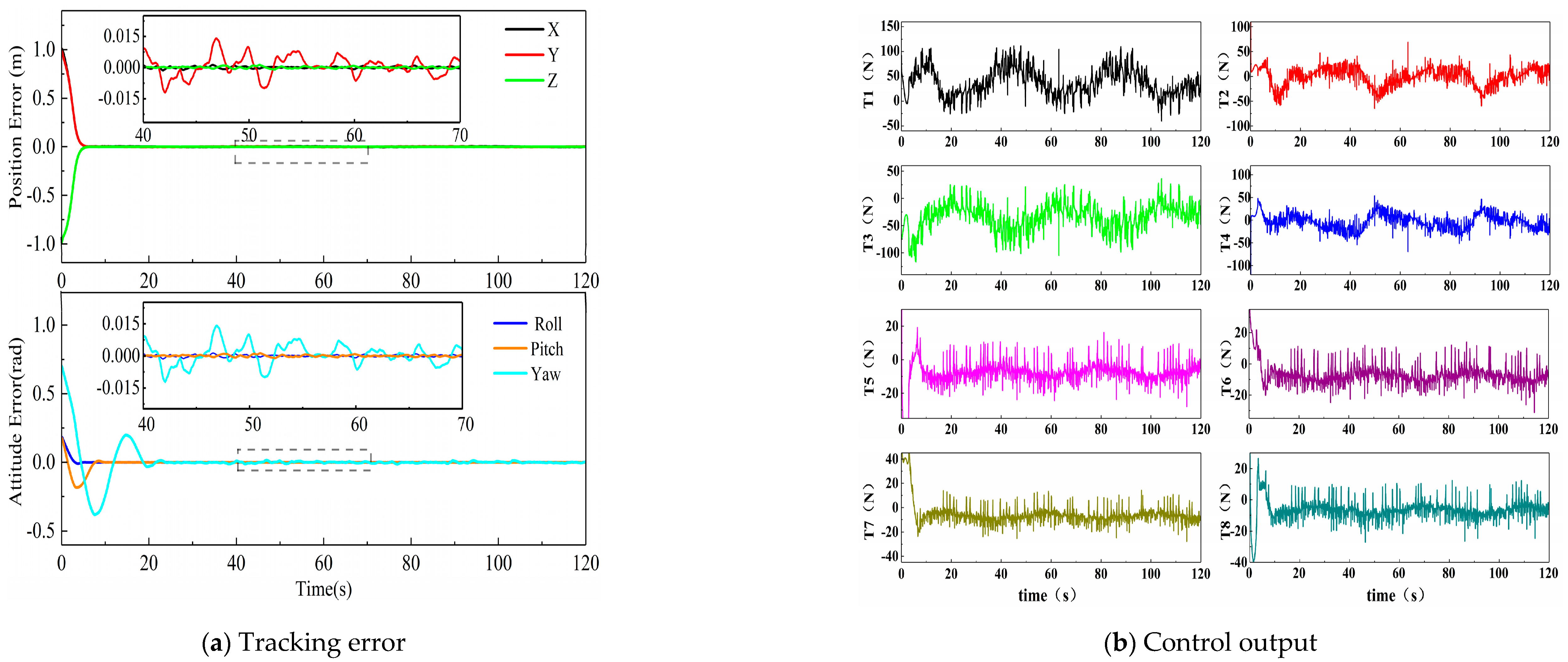
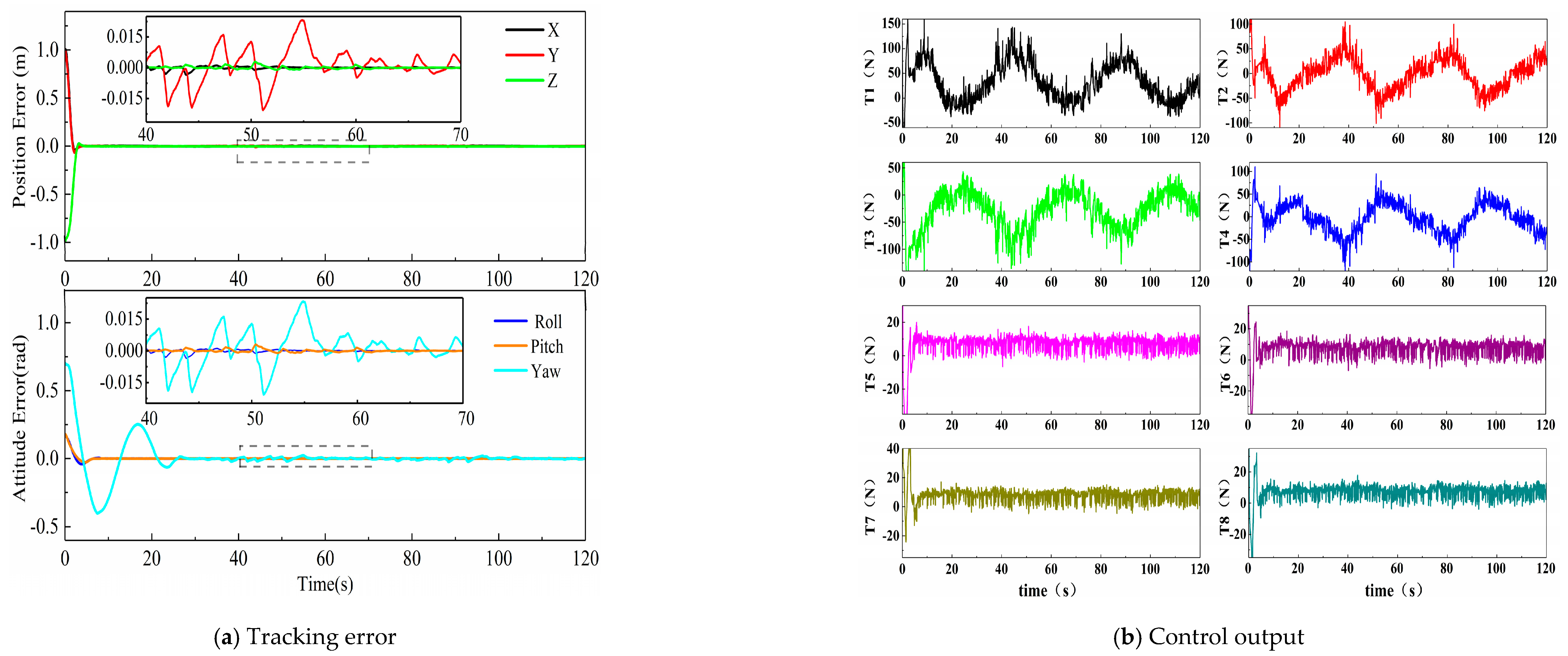
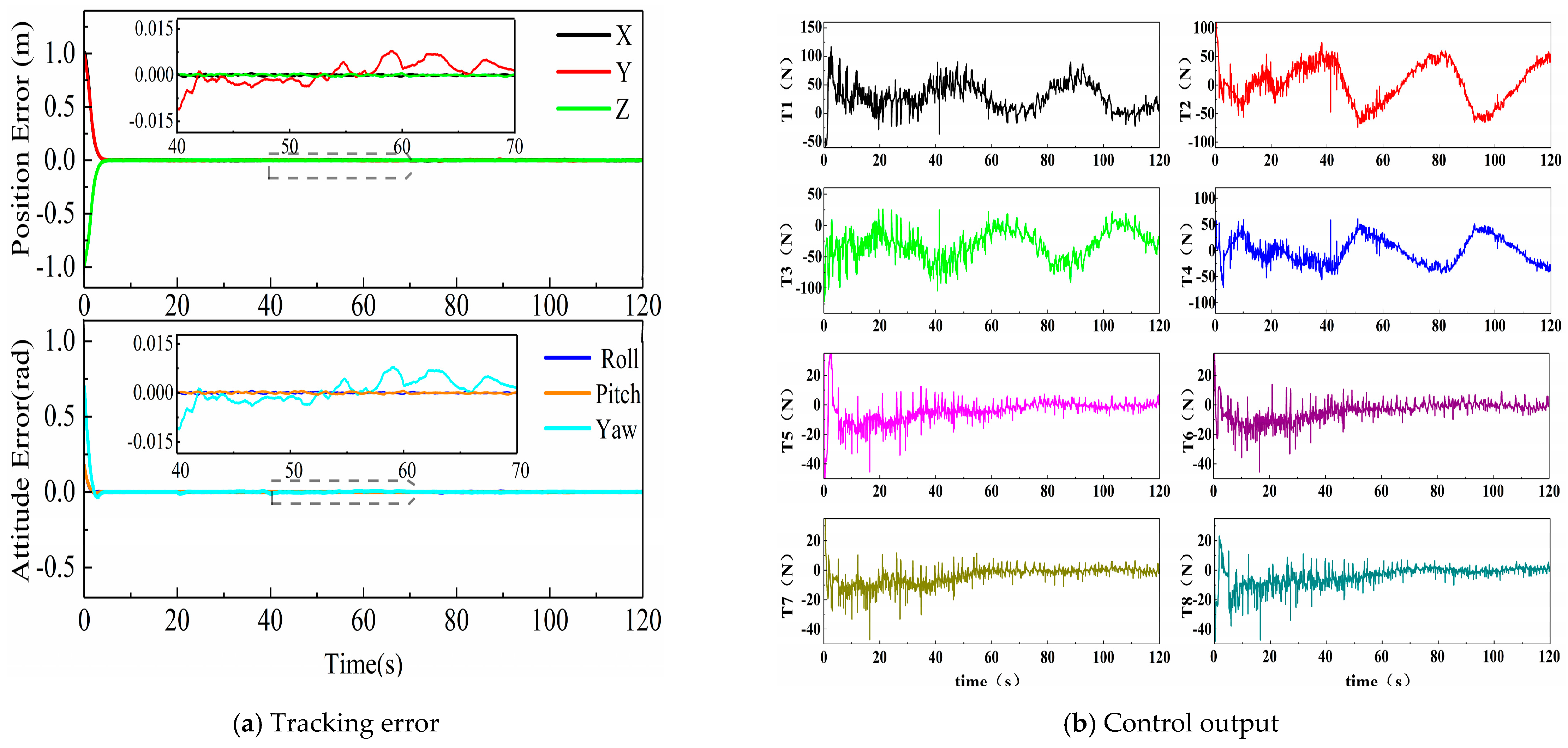
The simulation results of FTESO − FTC − APAM and FTESO − FTC and the compared method for Case 1 are presented in
Figure 1,
Figure 2 and
Figure 3, respectively. In addition, the simulation results of these three methods for Case 2 are presented in
Figure 4,
Figure 5 and
Figure 6, respectively. Finally, to fully illustrate the effectiveness of the method in this paper, the tracking results of these three methods for Case 3 are presented in
Table 1.
Referring to [
35], in this paper, the mean and mean square error of the absolute value of the tracking error were used to measure the tracking effect. If the chattering phenomenon in the control signals became serious, the energy consumption caused by the chattering of the control signal would be increased if the environmental parameters had no change, according to [
36]. The energy consumption value was calculated by the sum of the squares of the control signal (SSCS), shown as follows:
For the convenience of analysis, this paper organizes and summarizes the mean, mean square error of the absolute value of the tracking error, and energy consumption (SSCS) in Case 1–Case 3 into
Table 1.
In addition, in this paper, the position errors of the three degrees of freedom, X, Y, and Z, are synthesized into distance errors.
In terms of the tracking error and energy consumption, the simulation results of FTESO − FTC − APAM and FTESO − FTC and the compared method are analyzed.
Firstly, compared with the method in [
23], the analysis of Cases 1–3 in
Table 1 shows that FTESO − FTC has an obvious effect on reducing the energy consumption; however, the tracking accuracy was reduced. Taking Case 1 as an example, compared with the method in [
23], the mean and mean square error of the distance error of FTESO − FTC increased by 58.22% and 31.33%, respectively, so the tracking accuracy decreased. However, it can be found that compared with the method in [
23], FTESO + FTC reduced the energy consumption by 28.08%.
Compared with [
23], it can be concluded that FTESO − FTC was effective at reducing the energy consumption, but there was the problem of reducing the tracking accuracy. Therefore, this paper proposed PAM based on FTESO − FTC to reduce the energy consumption of the control output while maintaining a good tracking accuracy.
Then, compared with FTESO − FTC, it can be seen from Cases 1–3 in
Table 1 that FTESO − FTC − PAM significantly improved the tracking accuracy and slightly increased the energy consumption. Similarly, taking Case 1 as an example, compared with FTESO − FTC, FTESO − FTC − PAM reduced the mean value and mean square error of the distance error by 37.07% and 24.56%, respectively, that is, the tracking accuracy was significantly improved. FTESO − FTC − APAM was close to FTESO − FTC in terms of the energy consumption (slightly increased).
Furthermore, compared with the method in [
23], it can be obtained from Cases 1–3 in
Table 1 that FTESO − FTC − APAM can significantly reduce energy consumption on the premise of a slightly improved tracking accuracy. Then, taking Case 1 as an example, compared with [
23], the mean value and mean square error of the absolute value of the distance error in the FTESO − FTC − APAM were slightly smaller, and the tracking accuracy was slightly improved. In terms of energy consumption, compared with the method in [
23], FTESO − FTC − APAM was reduced by 29.92%, and the effect of reducing the energy consumption was obvious.
It can be concluded that FTESO − FTC − PAM was a further improved method based on the FTESO − FTC of this paper. Overall, based on the simulation results of the above three methods, it is concluded that compared with FTESO − FTC, the FTESO − FTC − PAM could greatly improve the tracking accuracy under the condition of a slight increase in energy consumption. Compared with the method in [
23], the FTESO − FTC − PAM of this paper made up for the shortcomings of FTESO − FTC in reducing the tracking accuracy when reducing the energy consumption and finally could achieve the control goal of reducing the energy consumption while maintaining a better tracking accuracy.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}