
New Wave Energy Converter Design Inspired by the Nenuphar Plant



Abstract
:1. Introduction
- Device design and characterisation;
- Integration of hydrodynamic data from potential theory software for hinged multi-body geometries;
- Hydrodynamic coupling between connected bodies;
- Time-domain values in regular waves;
- A rough estimate of energy output.
2. Nenuphar Wave Energy Converter Description
3. Numerical Modelling Overview
3.1. Formulation of the Problem
3.2. Power Extracted
3.3. Development of the Nenuphar Analysis Tool
3.3.1. Multiple Hinges Model
- Position and Orientation
- Position and Displacement
- Orientation and Rotation
- Rotation matrices
- Euler Angles
- Fixed Angles
- Transformations
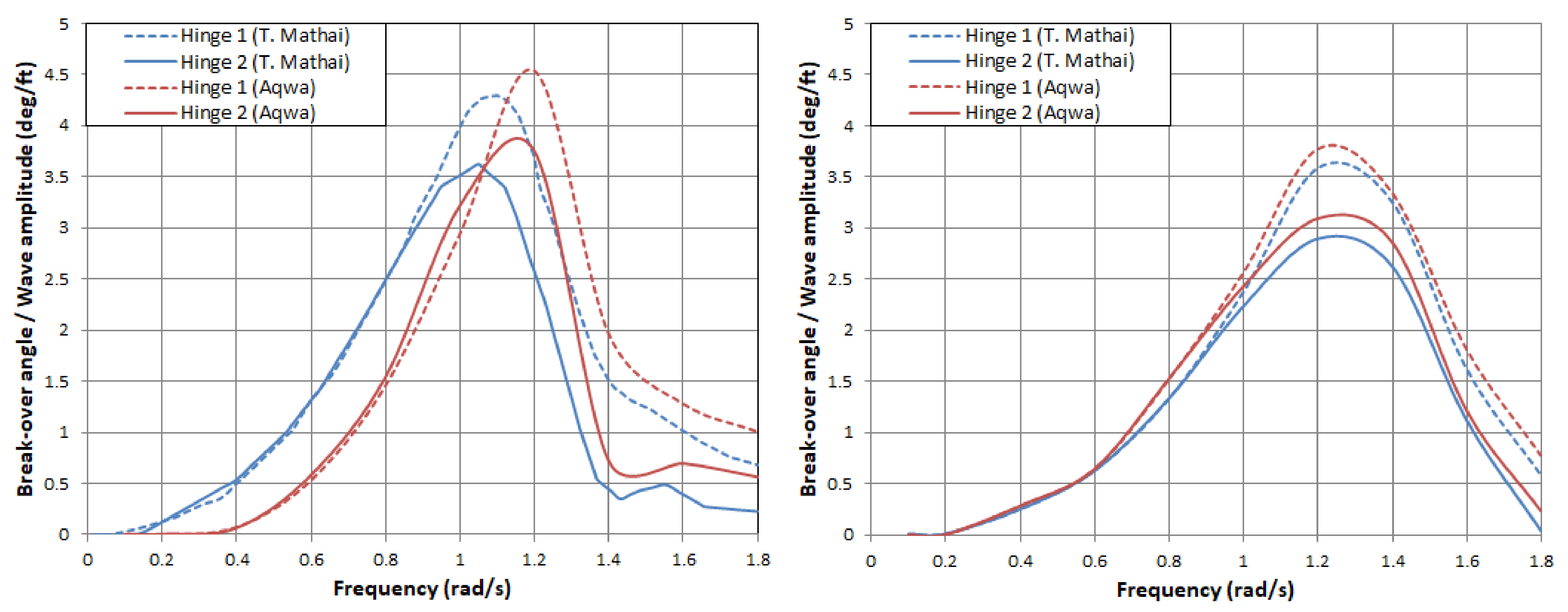
3.4. Tool Validation
4. Results for the Nenuphar Multi-Float System Configuration
5. Conclusions
- (i)
- Provide proof of the Nenuphar concept;
- (ii)
- Validate the code that allows for obtaining the rotations of the bodies in the axes not aligned with the principal axes;
- (iii)
- Obtain a preliminary assessment of the WEC performance;
- (iv)
- Identify potential issues and analyse the feasibility of constructive solutions;
- (v)
- Gather numerical data for the optimisation of mathematical models and experimental tests;
- (i)
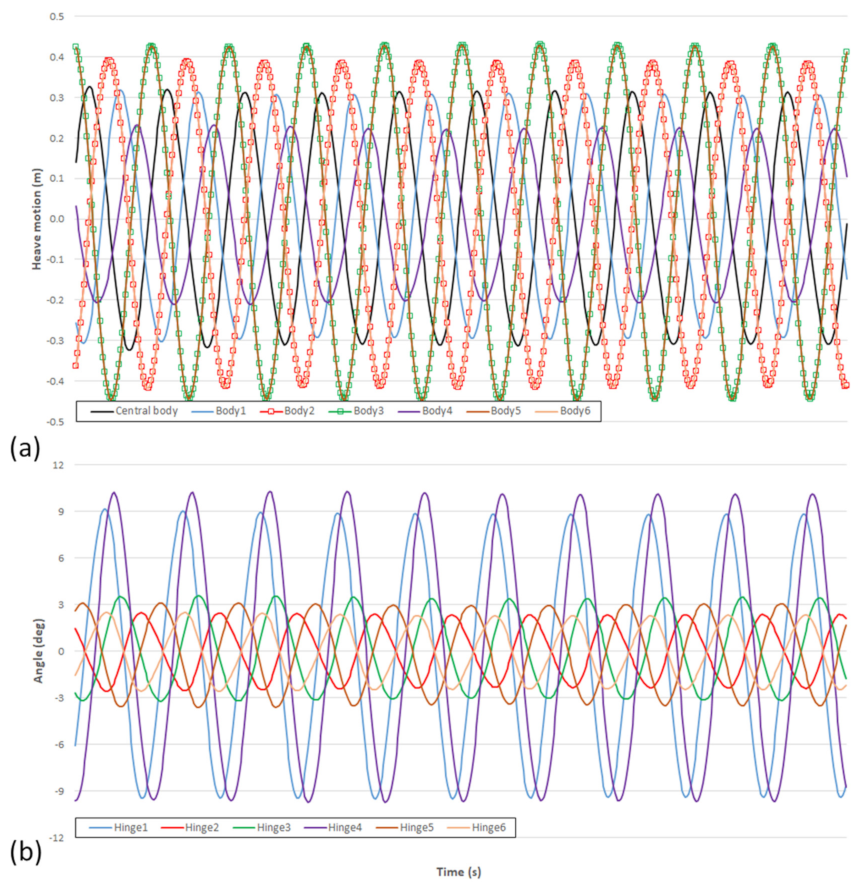
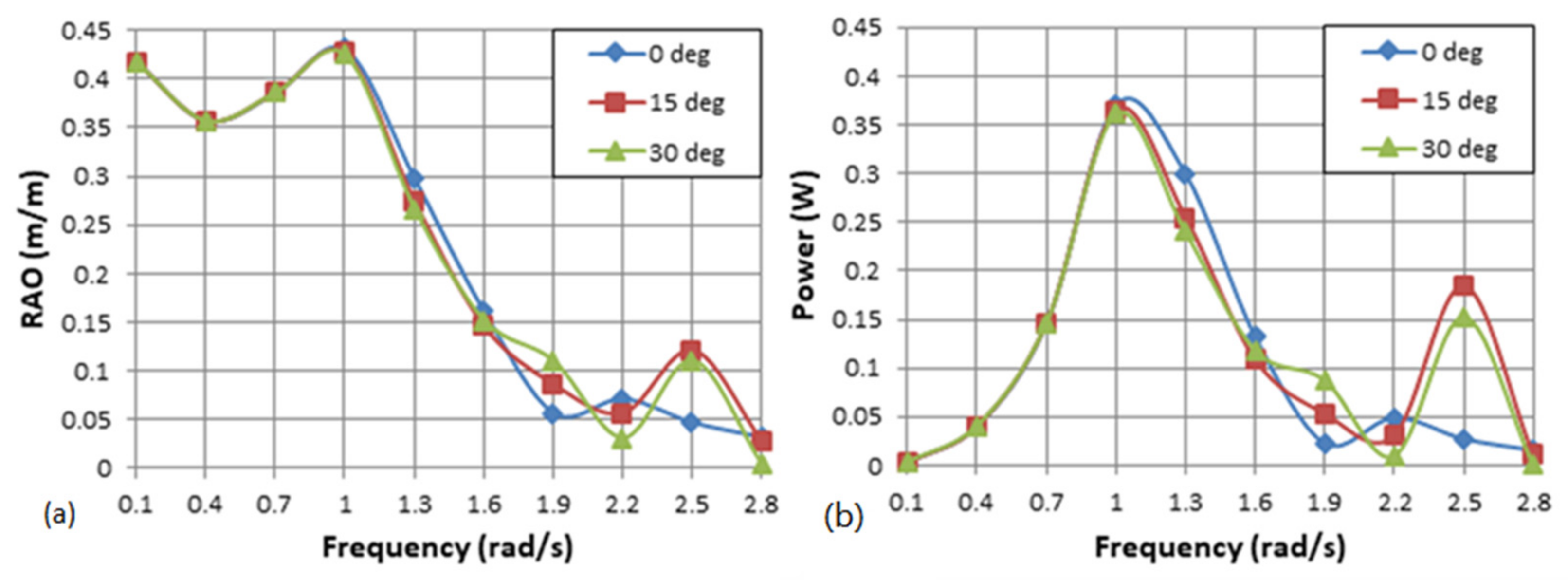
- The Nenuphar’s response predominantly occurs in the frequency of incident waves (entire test duration);
- (ii)
- The Nenuphar’s performance strongly depends on the incident wave characteristics;
- (iii)
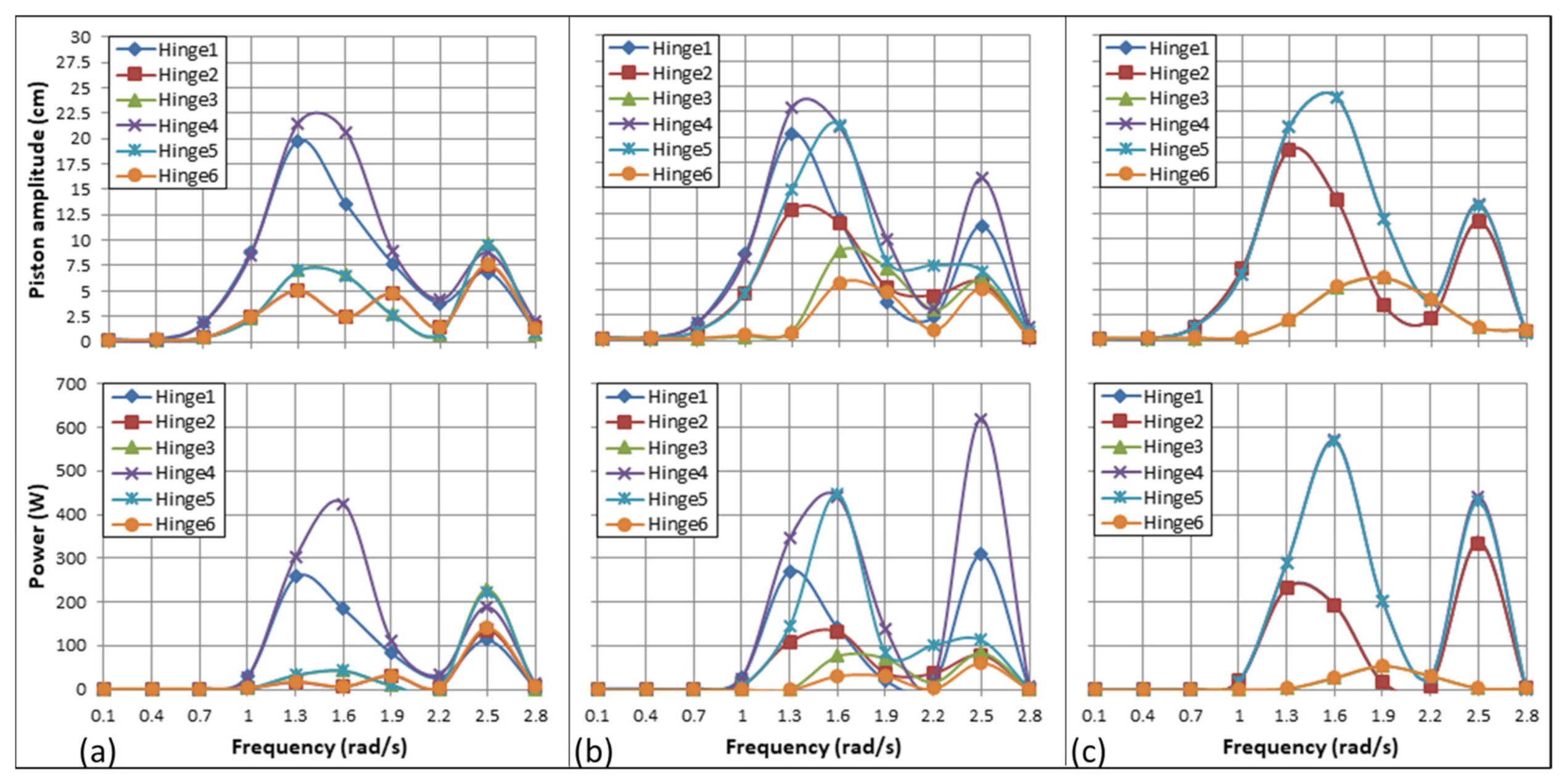
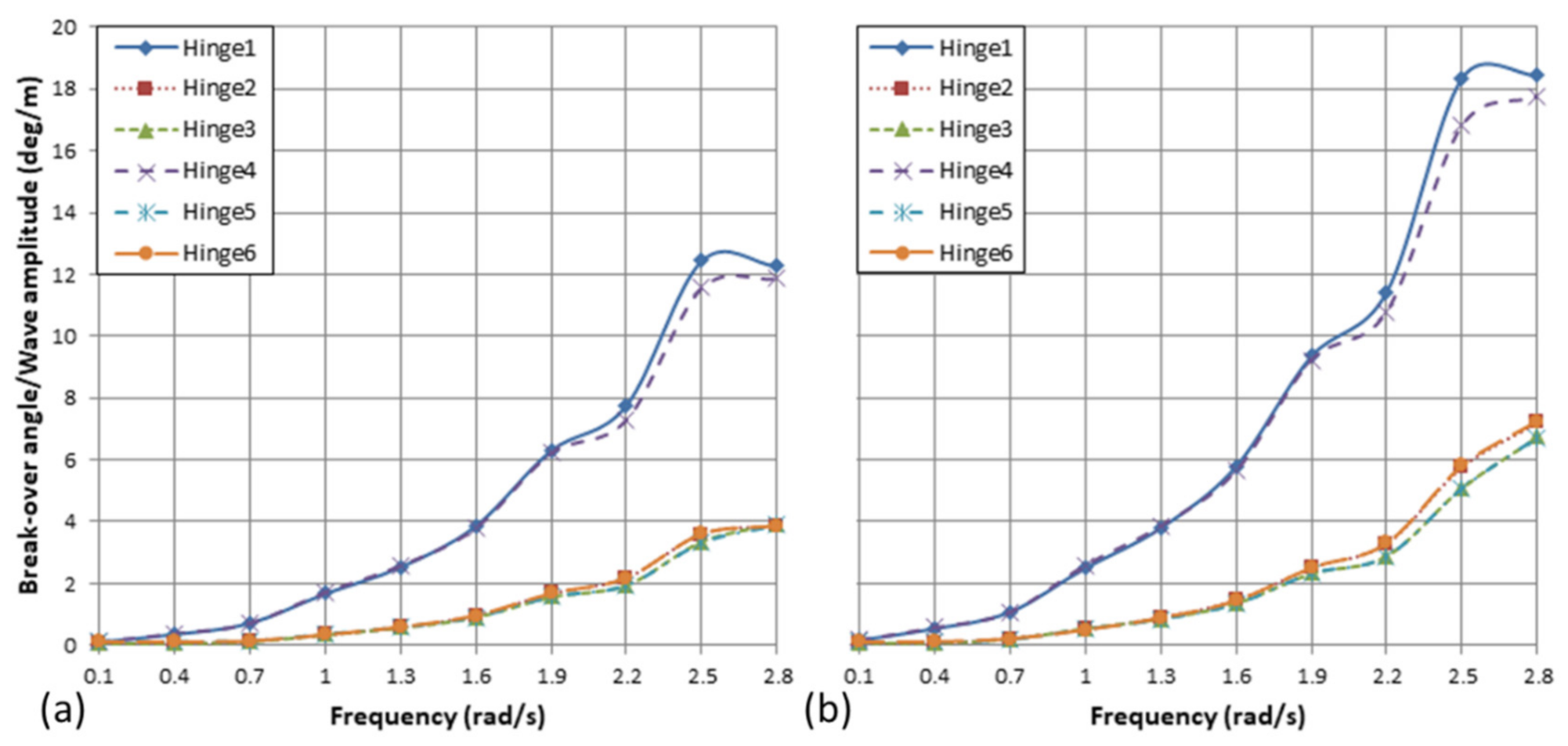
- A 30-degree inclination is the most favourable for the tested geometry and wave conditions.
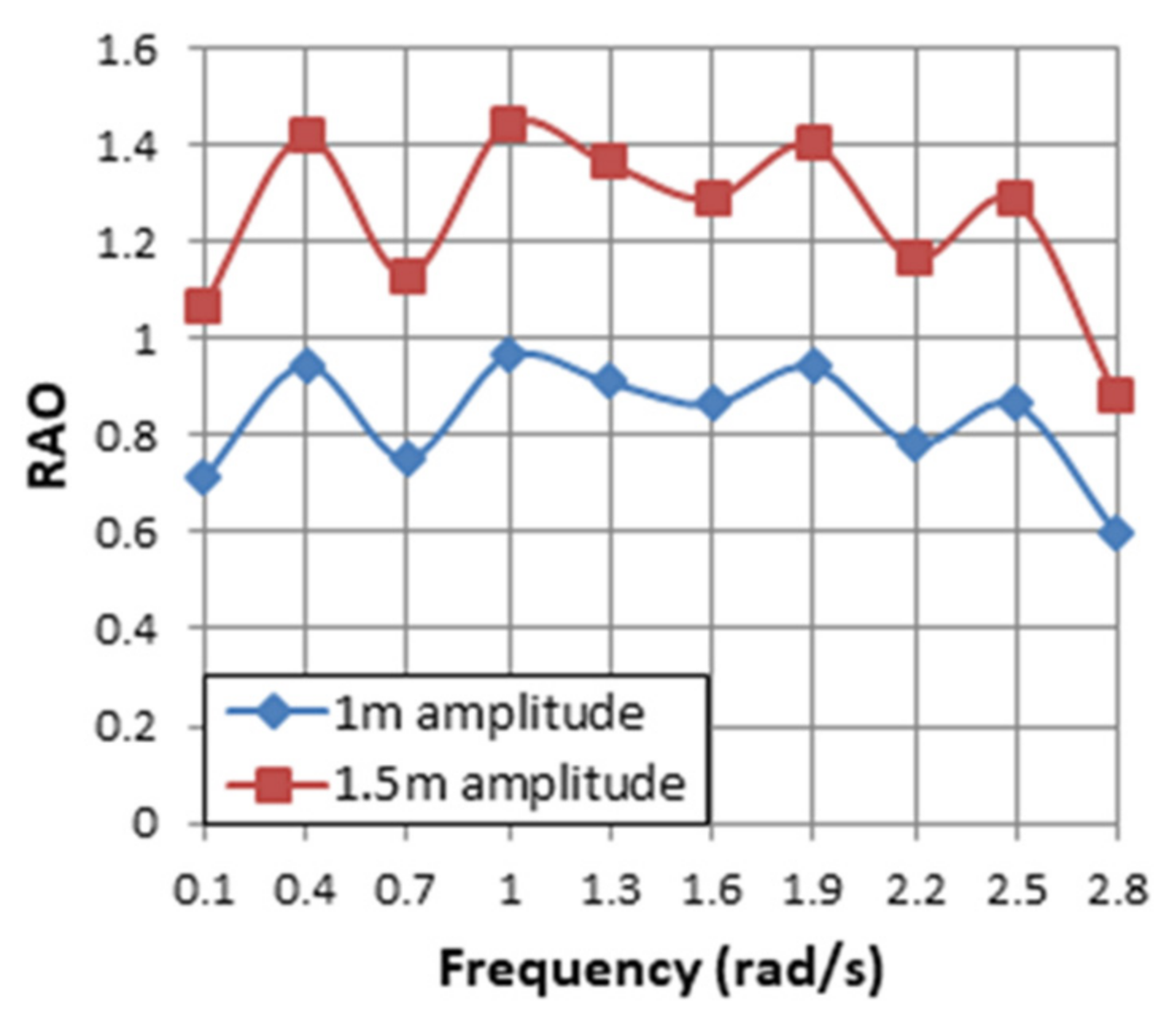
- (iv)
- The extraction of continuous energy by the point absorber under all conditions is mainly caused by the movements induced by the lateral body’s rotations.
- (i)
- A computer simulation that will be conducted for irregular waves, and different dimensions and shapes of floating bodies;
- (ii)
- An experiment focusing on a hydrodynamic viewpoint, which should deal with the variation in force or load at the connection points;
- (iii)
- PTO and mooring systems analysis in detail, because although hydrodynamic and mechanical interactions were excluded to simplify this study, it is expected that the converter’s efficiency was not reduced significantly.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khaligh, A.; Onar, O.C. Energy Sources, 3rd ed.; Elsevier Inc.: Amsterdam, The Netherlands, 2011; ISBN 9780123820365. [Google Scholar]
- Gonçalves, M.; Martinho, P.; Guedes Soares, C. Wave energy conditions in the western French coast. Renew. Energy 2014, 62, 155–163. [Google Scholar] [CrossRef]
- Carballo, R.; Sánchez, M.; Ramos, V.; Fraguela, J.A.; Iglesias, G. Intra-annual wave resource characterization for energy exploitation: A new decision-aid tool. Energy Convers. Manag. 2015, 93, 1–8. [Google Scholar] [CrossRef]
- Silva, D.; Bento, A.R.; Martinho, P.; Soares, C.G. High resolution local wave energy modelling for the Iberian Peninsula. Energy 2015, 91, 1099–1112 and 2016, 94, 857–858. [Google Scholar] [CrossRef]
- Gunn, K.; Stock-Williams, C. Quantifying the global wave power resource. Renew. Energy 2012, 44, 296–304. [Google Scholar] [CrossRef]
- Neill, S.P.; Reza, M.H. Wave Energy. In Fundamentals of Ocean Renewable Energy; E-Business Solutions: HongKong, China, 2018; pp. 107–140. ISBN 9780128104484. [Google Scholar]
- Silva, D.; Rusu, E.; Guedes Soares, C. Evaluation of various technologies for wave energy conversion in the Portuguese nearshore. Energies 2013, 6, 1344–1364. [Google Scholar] [CrossRef] [Green Version]
- Guedes Soares, C.; Bento, A.R.; Goncalves, M.; Silva, D.; Martinho, P. Numerical evaluation of the wave energy resource along the Atlantic European coast. Comput. Geosci. 2014, 71, 37–49. [Google Scholar] [CrossRef]
- Callaway, E. Energy: To catch a wave. Nature 2007, 450, 156–159. [Google Scholar] [CrossRef] [Green Version]
- Magana, D.; MacGillivary, A.; Jeffrey, H.; Hanmer, C.; Raventos, A.; Badcock-Broe, A.; Tzimas, E. Wave and Tidal Energy Strategic Technology Agenda; Si Ocean: Brussels, Belgium, 2014; pp. 1–44. [Google Scholar]
- Drew, B.; Plummer, A.R.; Sahinkaya, M.N. A review of wave energy converter technology. Proc. Inst. Mech. Eng. Part A J. Power Energy 2009, 223, 887–902. [Google Scholar] [CrossRef] [Green Version]
- Waveplam State of the Art Analysis—A Cautiously Optimistic Review of the Technical Status of Wave Energy Technology; Intelligent Energy Europe: Brussels, Belgium, 2009.
- Castro-Santos, L.; Martins, E.; Guedes Soares, C. Methodology to calculate the costs of a floating offshore renewable energy farm. Energies 2016, 9, 324. [Google Scholar] [CrossRef] [Green Version]
- Castro-Santos, L.; Martins, E.; Guedes Soares, C. Economic comparison of technological alternatives to harness offshore wind and wave energies. Energy 2017, 140, 1121–1130. [Google Scholar] [CrossRef]
- Gunnar, M.; Barstow, S.; Kabuth, A.; Pontes, M.T. Assessing the global wave energy potential. In Proceedings of the 29th International Conference on Ocean, Offshore, and Arctic Engineering, Shanghai, China, 6–11 June 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Poullikkas, A. Technology Prospects of Wave Power Systems. Electron. J. Energy Environ. 2014, 2, 47–69. [Google Scholar] [CrossRef]
- Bernardino, M.; Goncalves, M.; Guedes Soares, C. Marine Climate Projections Toward the End of the Twenty-First Century in the North Atlantic. J. Offshore Mech. Arct. Eng. 2021, 143, 061201. [Google Scholar] [CrossRef]
- Yemm, R.; Pizer, D.; Retzler, C.; Henderson, R. Pelamis: Experience from concept to connection. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 370, 365–380. [Google Scholar] [CrossRef] [Green Version]
- Falcão, A.F.D.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Guedes Soares, C.; Bhattacharjee, J.; Tello, M.; Pietra, L. Review and classification of wave energy converters. In Maritime Engineering and Technology; Guedes Soares, C., Garbatov, Y., Sutulo, S., Santos, T.A., Eds.; Taylor & Francis Group: London, UK, 2012; pp. 585–594. ISBN 9780415621465. [Google Scholar]
- Santhosh, N.; Baskaran, V.; Amarkarthik, A. A review on front end conversion in ocean wave energy converters. Front. Energy 2015, 9, 297–310. [Google Scholar] [CrossRef]
- Holmukhe, R.M.; Satre, J.V. Wave Energy—A Review. In Proceedings of the International Conference on Science, Engineering & Spirituality (ICSES’2010), Pune, India, 2014; pp. 1–10. [Google Scholar]
- Haren, P. Optimal design of Hagen-Cockerall raft, Massachusetts Institute of Technology. Ph.D. Thesis, Massachusetts Institute of Technology, Dept. of Civil Engineering, Cambridge, MA, USA, 1978. [Google Scholar]
- Kraemer, D.R.B.; Ohl, C.O.G.; McCormick, M.E. Comparison of experimental and theoretical results of the motions of a McCabe Wave Pump. In Proceedings of the 4th European Wave Energy Conference, Aalborg, Denmark, 19–21 November 2000. [Google Scholar]
- Nolan, G.; Catháin, M.; Murtagh, J.; Ringwood, J. Wave-Barge Interaction. In Proceedings of the Fifth European Wave Energy Conference, Cork, Ireland, 17–20 September 2003; Volume 1, pp. 1–8. [Google Scholar]
- Henderson, R. Design, simulation, and testing of a novel hydraulic power take-off system for the Pelamis wave energy converter. Renew. Energy 2006, 31, 271–283. [Google Scholar] [CrossRef]
- Columbia Power Technologies Technologies. Available online: http://columbiapwr.com/ (accessed on 23 March 2017).
- Ruol, P.; Zanuttigh, B.; Martinelli, L.; Kofoed, P.; Frigaard, P. Near-Shore Floating Wave Energy Converters: Applications for Coastal Protection. Coast. Eng. Proc. 2012, 1, 61. [Google Scholar] [CrossRef] [Green Version]
- Rusu, E.; Guedes Soares, C. Coastal impact induced by a Pelamis wave farm operating in the Portuguese nearshore. Renew. Energy 2013, 58, 34–49. [Google Scholar] [CrossRef]
- Bento, A.R.; Rusu, E.; Martinho, P.; Guedes Soares, C. Assessment of the changes induced by a wave energy farm in the nearshore wave conditions. Comput. Geosci. 2014, 71, 50–61. [Google Scholar] [CrossRef]
- Silva, D.; Rusu, E.; Guedes Soares, C. The effect of a wave energy farm protecting an aquaculture installation. Energies 2018, 11, 2109. [Google Scholar] [CrossRef] [Green Version]
- Stansby, P.; Carpintero Moreno, E.; Stallard, T.; Maggi, A. Three-float broad-band resonant line absorber with surge for wave energy conversion. Renew. Energy 2015, 78, 132–140. [Google Scholar] [CrossRef]
- Gaspar, J.F.; Stansby, P.K.; Calvário, M.; Guedes Soares, C. Hydraulic Power Take-Off concept for the M4 Wave Energy Converter. Appl. Ocean Res. 2021, 106, 102462. [Google Scholar] [CrossRef]
- Gaspar, J.F.; Calvário, M.; Kamarlouei, M.; Guedes Soares, C. Power take-off concept for wave energy converters based on oil-hydraulic transformer units. Renew. Energy 2016, 86, 1232–1246. [Google Scholar] [CrossRef]
- Gaspar, J.F.; Kamarlouei, M.; Sinha, A.; Xu, H.; Calvário, M.; Faÿ, F.X.; Robles, E.; Guedes Soares, C. Analysis of electrical drive speed control limitations of a power take-off system for wave energy converters. Renew. Energy 2017, 113, 335–346. [Google Scholar] [CrossRef]
- Gaspar, J.F.; Calvário, M.; Kamarlouei, M.; Guedes Soares, C. Design tradeoffs of an oil-hydraulic power take-off for wave energy converters. Renew. Energy 2018, 129, 245–259. [Google Scholar] [CrossRef]
- Floating Power Plant Products. Available online: http://www.floatingpowerplant.com/ (accessed on 23 March 2017).
- Marquis, L.; Kramer, M.M.; Kringelum, J.; Chozas, J.F.; Helstrup, N.E. Introduction of Wavestar Wave Energy Converters at the Danish offshore wind power plant Horns Rev 2. 4th Int. Conf. Ocean Energy 2012, 2, 2–7. [Google Scholar]
- Kamarlouei, M.; Gaspar, J.F.; Calvario, M.; Hallak, T.S.; Mendes, M.J.G.C.; Thiebaut, F.; Guedes Soares, C. Experimental study of wave energy converter arrays adapted to a semi-submersible wind platform. Renew. Energy 2022, 188, 145–163. [Google Scholar] [CrossRef]
- Kamarlouei, M.; Gaspar, J.F.; Calvario, M.; Hallak, T.S.; Mendes, M.J.G.C.; Thiebaut, F.; Guedes Soares, C. Experimental analysis of wave energy converters concentrically attached on a floating offshore platform. Renew. Energy 2020, 152, 1171–1185. [Google Scholar] [CrossRef] [Green Version]
- Falnes, J.; Hals, J. Heaving buoys, point absorbers and arrays. Philos. Trans. A. Math. Phys. Eng. Sci. 2012, 370, 246–277. [Google Scholar] [CrossRef] [Green Version]
- Dick, W. Wave Energy Converter. Canada Patent 2,642,547, 20 December 2001. [Google Scholar]
- Ocean Power Technologies PowerBuoy. Available online: http://www.oceanpowertechnologies.com/ (accessed on 23 March 2017).
- Beatty, S.J.; Hall, M.; Buckham, B.J.; Wild, P.; Bocking, B. Experimental and numerical comparisons of self-reacting point absorber wave energy converters in regular waves. Ocean Eng. 2015, 104, 370–386. [Google Scholar] [CrossRef]
- Leijon, M.; Boström, C.; Danielsson, O.; Gustafsson, S.; Haikonen, K.; Langhamer, O.; Strömstedt, E.; Stålberg, M.; Sundberg, J.; Svensson, O.; et al. Wave energy from the north sea: Experiences from the lysekil research site. Surv. Geophys. 2008, 29, 221–240. [Google Scholar] [CrossRef] [Green Version]
- Seabased, A.B. The Seabased Solution. Available online: http://www.seabased.com/en/ (accessed on 23 March 2017).
- Rahm, M. Underwater Substation System for Wave Energy Converters; Uppsala University: Uppsala, Sweden, 2010. [Google Scholar]
- Elwood, D.; Schacher, A.; Rhinefrank, K.; Prudell, J.; Yim, S.; Amon, E.; Al, E. Numerical modelling and ocean testing of a direct-drive wave energy device utilizing a permanent magnet linear generator for power take-off. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. OMAE2009-79146. [Google Scholar]
- Brekken, T.K.A.; Von Jouanne, A.; Han, H.-Y. Ocean wave energy overview and research at Oregon State University. In Proceedings of the 2009 IEEE Power Electronics and Machines in Wind Applications, Lincoln, NE, USA, 24–26 June 2009. [Google Scholar] [CrossRef]
- Oscilla Power Wave Energy. Available online: http://oscillapower.com/ (accessed on 23 March 2017).
- Mundon, T.R.; Nair, B. Optimization of a Magnetostrictive Wave Energy Converter. Gd. Renew. Energy 2014, 2014, 1–6. [Google Scholar]
- Mundon, T.R.; Imamura, J. Optimization of a Magnetostrictive Wave Energy Converter. In Proceedings of the Grand Renewable Energy, Tokyo, Japan, 27 July–1 August 2015. [Google Scholar]
- López, I.; Andreu, J.; Ceballos, S.; Martínez De Alegría, I.; Kortabarria, I. Review of wave energy technologies and the necessary power-equipment. Renew. Sustain. Energy Rev. 2013, 27, 413–434. [Google Scholar] [CrossRef]
- Bozzi, S.; Miquel, A.M.; Antonini, A.; Passoni, G.; Archetti, R. Modeling of a point absorber for energy conversion in Italian seas. Energies 2013, 6, 3033–3051. [Google Scholar] [CrossRef] [Green Version]
- Xu, S.; Wang, S.; Guedes Soares, C. Review of mooring design for floating wave energy converters. Renew. Sustain. Energy Rev. 2019, 111, 595–621. [Google Scholar] [CrossRef]
- ANSYS Hydrodynamic Analysis with Ansys AQWA (Version 17.2). Available online: https://www.ansys.com/products/structures/ansys-AQWA (accessed on 23 March 2017).
- Paparella, F. Modeling and Control of a Multibody Hinge-Barge Wave Energy Converter. Ph.D. Thesis, Maynooth University, Maynooth, Ireland, 2017. [Google Scholar]
- Paparella, F.; Ringwood, J.V. Optimal Control of a Three-Body Hinge-Barge Wave Energy Device Using Pseudospectral Methods. IEEE Trans. Sustain. Energy 2017, 8, 200–207. [Google Scholar] [CrossRef] [Green Version]
- Mei, C.C.; Stiassnie, M.A.; Stiassnie, M.A.; Yue, D.K.-P. Theory and Applications of Ocean Surface Waves, 3rd ed.; World Scientific Publishing Company: Hackensack, NJ, USA, 2018. [Google Scholar]
- Falnes, J. Ocean Waves and Oscillating Systems; Cambridge University Press: Cambridge, UK, 2002; ISBN 0-521-78211-2. [Google Scholar]
- Van der Molen, W.; Wenneker, I. Time-domain calculation of moored ship motions in nonlinear waves. Coast. Eng. 2008, 55, 409–422. [Google Scholar] [CrossRef]
- Morison, J.R.; Johnson, J.W.; Schaaf, S.A. The Force Exerted by Surface Waves on Piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- ANSYS AQWA Workbench. Available online: https://www.ansys.com/ (accessed on 23 March 2017).
- Papillon, L.; Costello, R.; Ringwood, J.V. Boundary element and integral methods in potential flow theory: A review with a focus on wave energy applications. J. Ocean Eng. Mar. Energy 2020, 6, 303–337. [Google Scholar] [CrossRef]
- Siciliano, B.; Khatib, O. Handbook of Robotics; Springer: Berlin, Germany, 2008; ISBN 9783540239574. [Google Scholar]
- Mathai, T. Use of generalized modes in hydrodynamic analysis of multiple bodies. Int. Offshore Polar Eng. Conf. 2000, 396–400. [Google Scholar]
- Li, Y.; Yu, Y.H. A synthesis of numerical methods for modeling wave energy converter-point absorbers. Renew. Sustain. Energy Rev. 2012, 16, 4352–4364. [Google Scholar] [CrossRef]
- Yu, Y.H.; Tom, N.; Jenne, D. Numerical analysis on hydraulic power take-off for wave energy converter and power smoothing methods. Madrid, Spain, 17–22 June 2018. OMAE2018-78176. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Central Body | Lateral Bodies | |
|---|---|---|
| Length (m) | 13.0 | 15.0 |
| Width (m) | 15.0 | 7.5 |
| Spacing between rafts (m) | 1.30 | 1.30 |
| Draft (m) | 0.7 | 0.7 |
| Displacement mass (kg) | 98,718.7 | 455,625.0 |
| Ballast (kg) | 43,993.2 | 190,014.7 |
| Material | HY-80 (Steel) | HY-80 (Steel) |
| Thickness (m) | 0.02 | 0.02 |
| Density (kg/m3) | 7746 | 7746 |
| Radius of gyration, Kxx (m), Roll | 3.4 | 2.2 |
| Radius of gyration, Kyy (m), Pitch | 3.4 | 4.3 |
| Radius of gyration, Kzz (m), Yaw | 4.8 | 4.8 |
| Centre of gravity, xG (m) | 0 | 15.2/7.7/−7.7/15.3/−7.7/7.7 |
| Centre of gravity, zG (m) | 0 | 0/13.2/13.2/0/−13.2/−13.2 |
| KG (m) | 0.7 | 0.7 |
| KB (m) | 0.3 | 0.3 |
| BM (m) | 27.8 | 6.9 |
| GM (m) | 27.5 | 6.6 |
| TPC (m) | 1.5 | 1.2 |
| Parameter | Value |
|---|---|
| Water density (kg/m3) | 1000 |
| Water depth (m) | 1000 |
| Water size, x (m) | 91 |
| Water size, y (m) | 86 |
| Mooring cable stiffness (N/m) | 4000 |
| Mooring type | Catenary |
| Mesh maximum size (Hz) | 0.495 |
| Time analysis (s) | 2700 |
| Time step (s) | 0.1 |
| Ramping time (s) | 18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Díaz, H.; Rodrigues, J.M.; Guedes Soares, C. New Wave Energy Converter Design Inspired by the Nenuphar Plant. J. Mar. Sci. Eng. 2022, 10, 1612. https://doi.org/10.3390/jmse10111612
Díaz H, Rodrigues JM, Guedes Soares C. New Wave Energy Converter Design Inspired by the Nenuphar Plant. Journal of Marine Science and Engineering. 2022; 10(11):1612. https://doi.org/10.3390/jmse10111612
Chicago/Turabian StyleDíaz, Hugo, José Miguel Rodrigues, and C. Guedes Soares. 2022. "New Wave Energy Converter Design Inspired by the Nenuphar Plant" Journal of Marine Science and Engineering 10, no. 11: 1612. https://doi.org/10.3390/jmse10111612