1. Introduction
The Arctic Sea ice is undergoing unprecedented decline as a result of global climate change [
1]. Wang and Overland [
2] predicted that, by 2030, sea ice will be greatly reduced in the Arctic regions, improving several Arctic routes, including the Northeast (NEP) and the Northwest Passages (NWP), especially in summer. Arctic routes can save up to tens of days and come with large cost reductions, promoting huge commercial potential [
3]. Furthermore, the development of several industrial fields has increased in Arctic Sea lanes, including fishing, scientific research, mining, and tourism [
4,
5].
To ensure the safety of the growing amounts of human activities in the Arctic, it is necessary to develop a navigation system with high positioning accuracy. Commonly used navigation and positioning methods at sea include satellite, inertial, magnetic, and gravity–aid navigation systems. However, the feasibility of the strapdown inertial navigation system (SINS) is constrained because the fictitious graticules change from rectangular in low latitudes to triangular in high latitudes [
6]. Magnetic and gravity sensors are not suitable either, because magnetic and gravity forces are nearly constant in the polar region [
7]. GNSS has global coverage, a high sampling rate, and high–precision positioning results; therefore, it is utilized as a preferred navigation method in the Arctic [
8].
A number of high–precision GNSS navigation and positioning algorithms have been developed, including kinematic (RTK), satellite–based augmentation systems (SBASs), and precise point positioning (PPP). The RTK method requires building base stations in the Arctic; therefore, it is not suitable. SBAS services need the GEO satellite to broadcast precise correction information; however, this cannot be appropriately received in the Arctic due to the low satellite altitude angle [
9]. The PPP concept was proposed in 1997, and has been widely used for its higher positioning accuracy (centimeter–level or higher) with a single GNSS receiver [
10,
11]. As a result, PPP boasts huge advantages over other algorithms and is preferred for use in the Arctic regions.
Little work on the GNSS PPP has been conducted in the polar regions due to the harsh environment. Zhang and Andersen [
12] installed a GNSS receiver on the Antarctic Amery ice shelf to analyze its movement trend using PPP technology. Through simulation calculations, YANG and Xu [
7] simulated and analyzed BDS–2 and BDS–3 constellations for navigation and positioning services in the polar regions, as well as the coverage of integrated GPS/BDS constellations. Similarly, Yao et al. [
13] analyzed the positioning accuracy of BDS PPP and combined GPS/BDS PPP. Dabove et al. [
14] evaluated the performance of both single– and multi–GNSS PPP solutions in high latitudes, based on an Antarctic GNSS station.
Traditional post–processing PPP methods with several–day latencies for the precise ephemeris do not meet the requirements for real–time positioning. Meanwhile, IGS provides services via Radio Technical Commission for Maritime Services (NTRIP), whose real–time capability can be further improved by increasing the number of analysis centers (ACs) and real–time products. These ACs, e.g., BKG, CNES, DLR, ESA/ESOC, GFZ, GMV, NRCan, and WHU, can provide both GPS and multi–GNSS combination products. Thus, the RT–PPP method has a wide range of applications spanning different fields, e.g., earthquake early warning, weather forecasting, and sea–level measurement systems [
15,
16,
17,
18].
In polar regions, real–time data transmission may produce a bottleneck. According to The International Convention for Safety of Life at Sea (SOLAS) and The International Code for Ships Operating in Polar Waters (Polar Code), both Inmarsat and Iridium equipment must be installed on the ship when sailing in the Arctic, especially in areas above 76° N [
19]. Iridium, which pioneered the low–Earth–orbit (LEO) communication satellite, has considerable coverage in the polar regions thanks to its special orbital space structure, offering effective and reliable real–time ship communications in the Arctic regions (
https://www.iridium.com/network/, accessed on 1 February 2022). This has opened an opportunity for the RT–PPP method to be used for polar–region ship navigation and oil/gas exploitation.
Some work has been performed to evaluate the performance of the PPP algorithm in polar regions. However, all tests are based on data collected from only a few polar IGS stations, which cannot truly reflect the positioning accuracy of the sailing ships on sea routes. To address this limitation, we have carried out more comprehensive experiments. We installed a GNSS device on the M/V TIANHUI, which continuously collected data in the NEP during the period between 10 September and 20 September 2019. We assessed the performance of the RT–PPP in the NEP in terms of GNSS signal and real–time product quality, and single– and dual–frequency GNSS positioning accuracy.
Our paper is organized as follows:
Section 2 describes the related background knowledge, including GNSS signal quality and the RT–PPP model, and then describes our NEP RT–PPP experiments.
Section 3 analyzes the signal quality of the GNSS in the NEP and shows the RT–PPP performance, including the accuracy of CLK93 products, and SF and DF RT–PPP positioning results, comparisons, and validations between single–GPS and GPS/Galileo/BDS combinations. In
Section 4, we discuss the effectiveness of real–time ionosphere products on SF RT–PPP positioning, which is followed by our summaries and conclusions in
Section 5.
2. Materials and Methods
2.1. GNSS Signal Quality
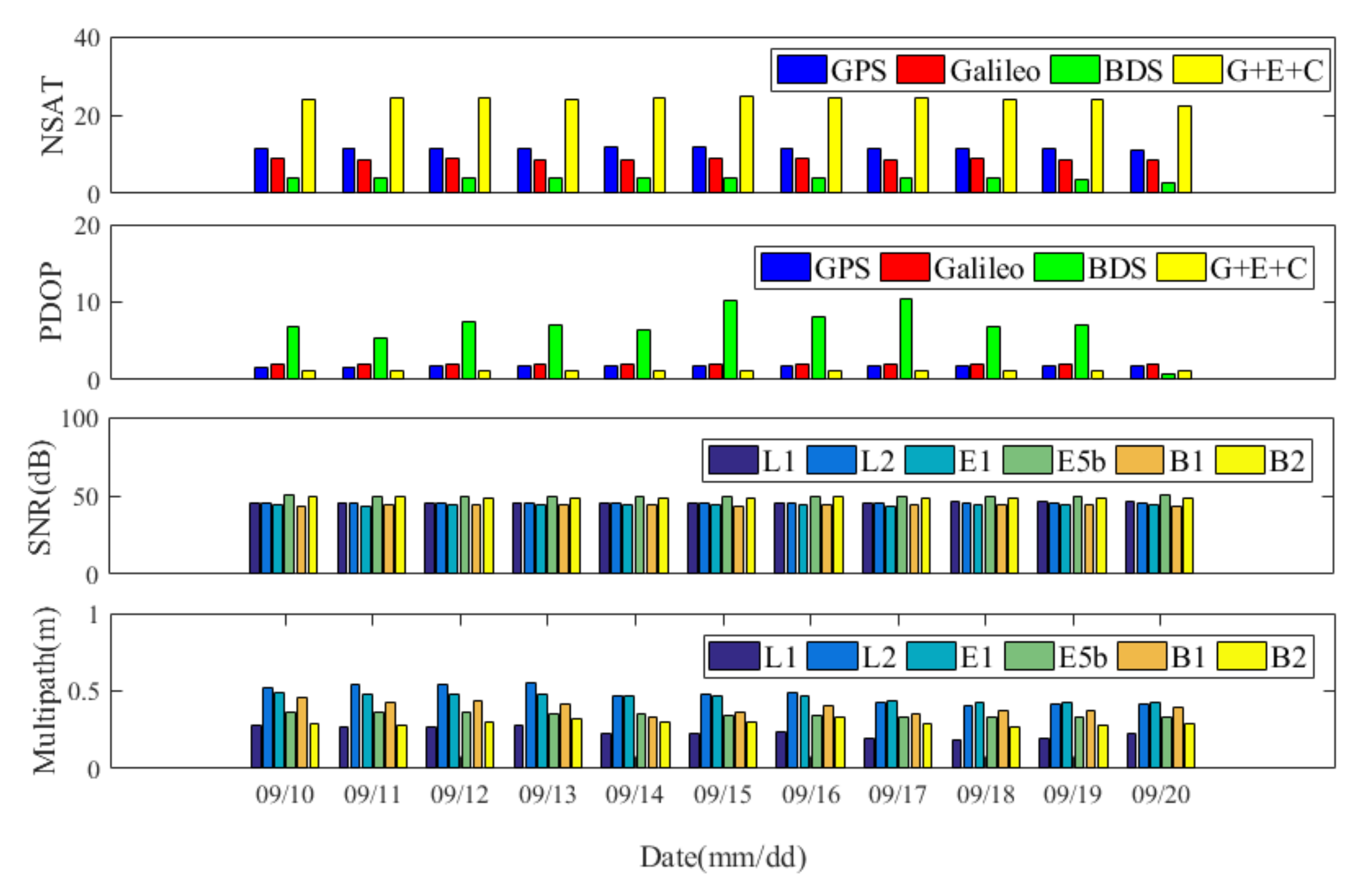
The quality of satellite signals can greatly affect positioning accuracy. However, little work has been performed to analyze GNSS signal quality in the Arctic NEP. To address this issue, we first discuss the corresponding quality metrics, including the maximum satellite elevation, NSAT, PDOP, SNR, and multipath errors.
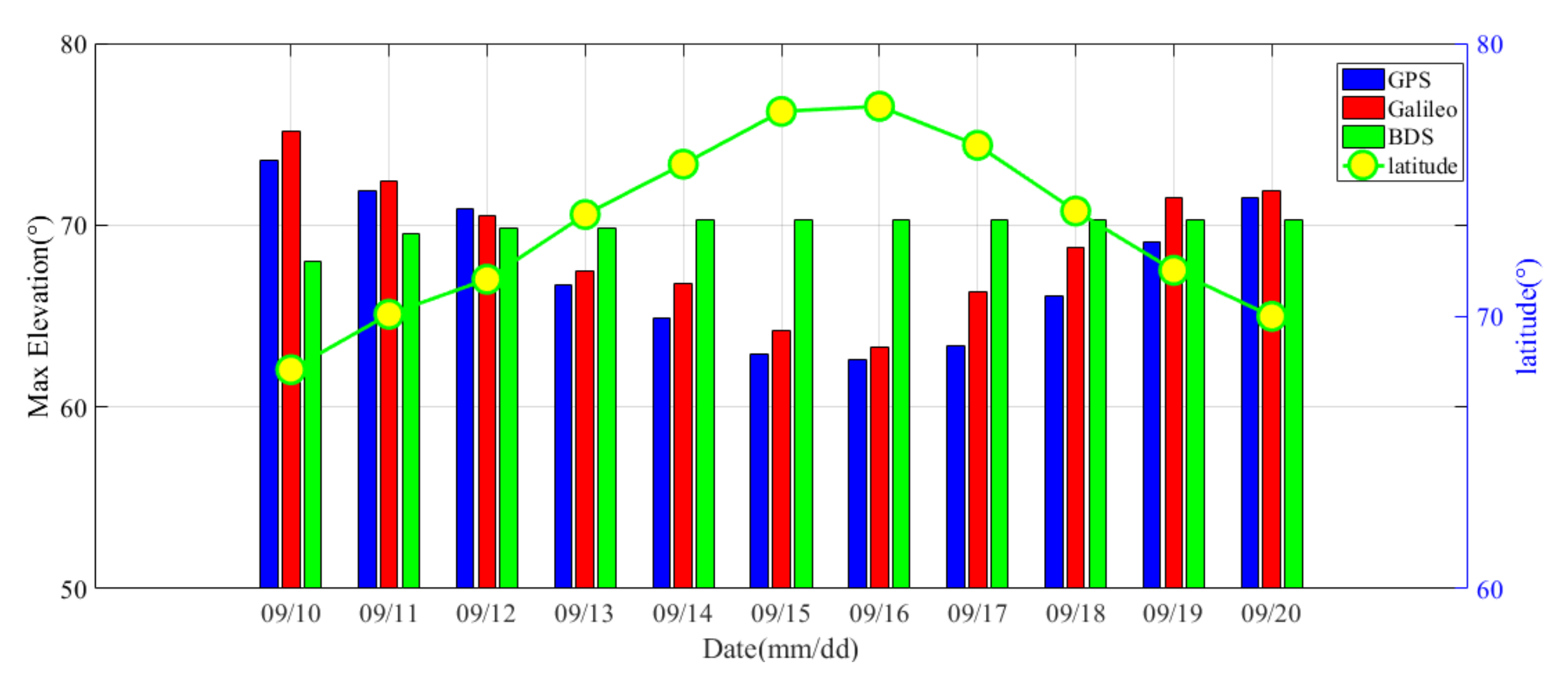
Both tropospheric and ionospheric errors have considerable impacts on GNSS positioning, and lower altitudes usually result in larger atmospheric and multipath errors. In addition, the satellite elevation angle at high latitudes is usually low; thus, it is necessary to discuss the satellite elevation in the NEP.
The NSAT and the DOP represent certain spatial geometry features of GNSS satellites. The PDOP reflects positional geometry in the X, Y, and Z directions [
20], which can be calculated as below:
where the vector of
denotes the observed pseudo–range minus computed values;
B denotes the corresponding design matrix; and
is the estimated receiver clock offset.
is the m–th row vector with all unit values of 1. The vector of
denotes the pseudo–range observation noises.
The receiver SNR is related to factors such as residual atmospheric and multipath errors, antenna gains, and the internal circuit design of the receiver, which reflects the data quality and the observation noise level.
The signal received by the GNSS receiver includes not only the direct signal, but also the reflected signal from nearby objects (such as the sea surface); thus, multipath errors should be considered due to the interference of these two signals. The multipath error
of the
signal can be approximated as [
21]:
where
s,
r, and
denote the satellite PRN (pseudo random noise), receiver, and carrier frequency;
and
are the pseudo–range and carrier–phase observation, respectively;
and
are the code biases;
is the wave–length, and
is the frequency.
2.2. GNSS Real–Time PPP Model
2.2.1. Multi–GNSS SF RT–PPP Model
The standard uncombined single–frequency PPP model can be expressed as follows:
where
L and
P are the carrier phase and pseudo–range observation, respectively;
represents the GNSS system;
is the satellite–receiver geometric distance;
and
represent the clock bias;
is the wavelength of frequency
j;
b and
d are the phase delay and the code biases;
N is the integer ambiguity;
is the ionospheric delay at frequency
j;
is the tropospheric delay; and
and
denote the pseudo–range and carrier phase observation noise.
2.2.2. Multi–GNSS Ionospheric–Free (IF) DF RT–PPP Model
The ionosphere is a dissipative medium; thus, the ionospheric errors of GNSS signals are frequency dependent, which can be expressed as:
Therefore, the linear combination (LC) of GNSS observations at different frequencies can effectively eliminate the influence of the first–order ionosphere errors,
Then, the undifferentiated IF–LC RT–PPP model can be expressed [
22]:
To ensure the calculation efficiency, as well as the product accuracy, IGS and some of the ACs use the IF–LC model in real–time precise ephemeris and clock calculation. As a result, the receiver and the satellite code biases
and
will be absorbed by the receiver and satellite clock, respectively. Meanwhile, the phase delays
and
will be absorbed by phase ambiguities. Therefore, Equation (9) can be rewritten as:
with
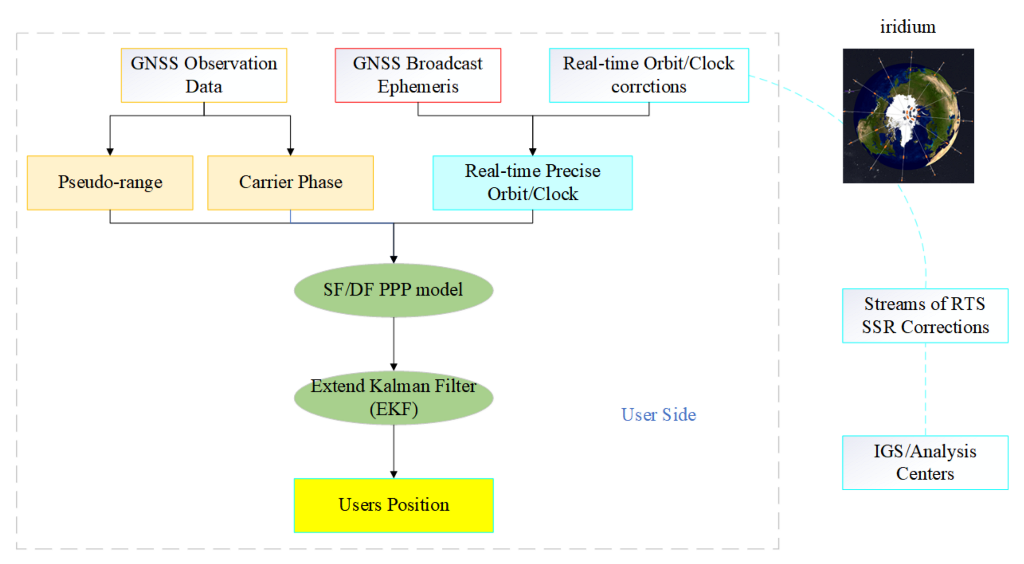
2.2.3. RT–PPP Method in NEP
We processed the RT–PPP method in the NEP in three steps, i.e., data collection, real–time precise orbit/clock calculation, and PPP processing. In the first step, we received data including GNSS observation data, broadcast ephemeris, and real–time orbit/clock corrections via LEO, such as Iridium. In the second step, we calculated the real–time precise orbit and clock by using the real–time orbit/clock corrections, and the specific calculation process referred to in (
https://igs.org/wg/real-time, accessed on 1 February 2022). In the third step, we used the PPP model mentioned above and an extended Kalman filter to obtain the users’ positions. The specific RT–PPP method in the NEP is shown in
Figure 1.
2.3. GNSS Data Collection in NEP
We installed a data acquisition system on the M/V TIANHUI, including a low–cost U–blox ZED–F9P GNSS receiver and a GNSS antenna, to evaluate the RT–PPP positioning performance in the NEP.
Figure 2 shows that TIANHUI is a cargo ship with a length of 190 m and a width of 29 m. The GNSS antenna is placed on the ship deck, and the power supply and receiver are installed in the cabin equipment room.
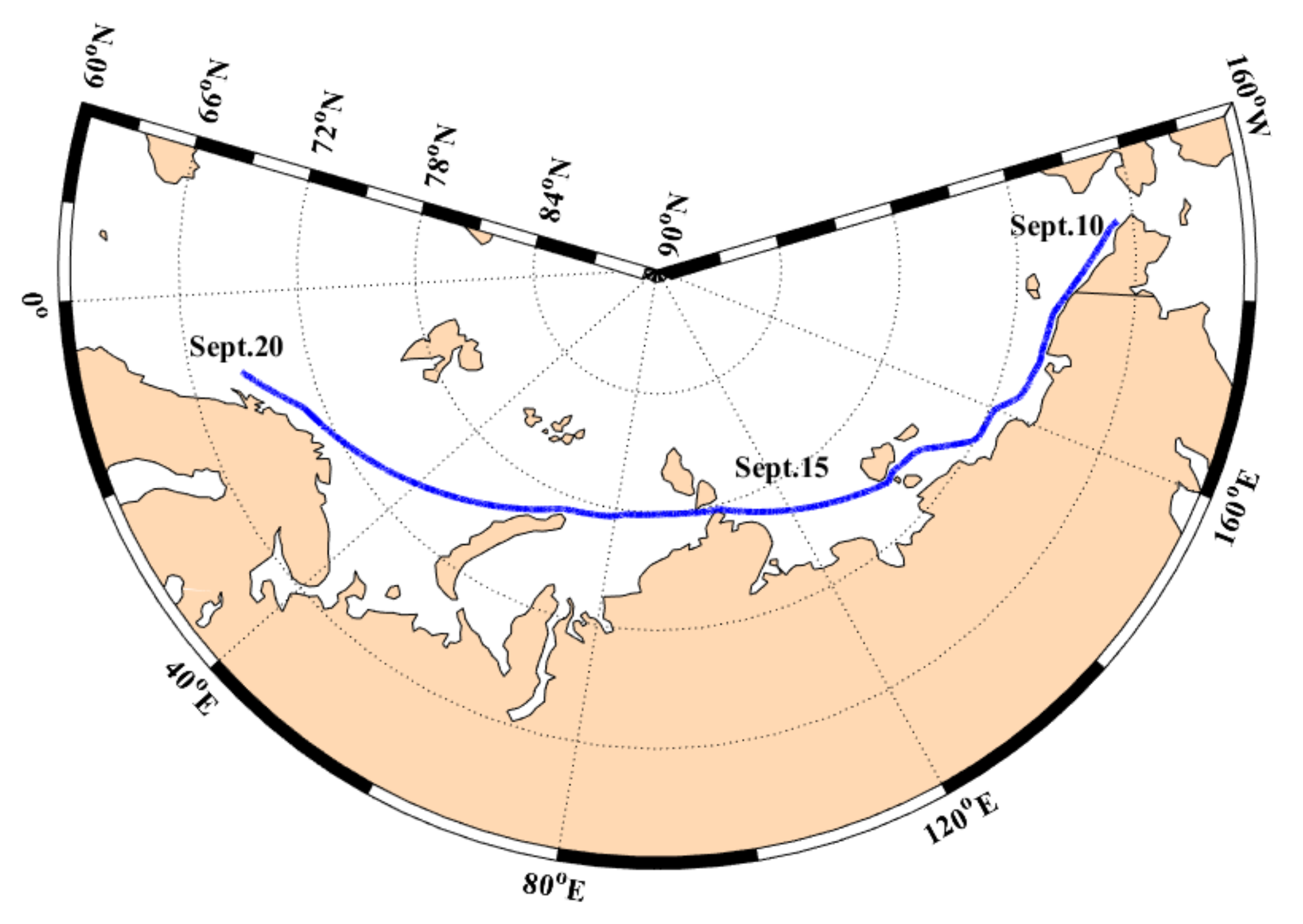
The M/V TIANHUI set sail from Yangshan Port in Shanghai on 30 August 2019, crossed the Bering Strait into the NEP on 10 September, and entered the Norwegian Sea on 20 September, which is shown in
Figure 3. The total voyage on the NEP was approximately 3000 nautical miles, and we collected approximately 11 days of GNSS raw observation data with a 1 s sampling rate. However, the GLONASS signal was shielded in the data acquisition process; as such, we only collected GPS, Galileo, and BDS observation data.
Meanwhile, we received the CLK93 stream of the state–space representation (SSR) orbit/clock correction products, which contain the correction information for Multi–GNSS, via NTRIP Caster by BNC software, and the data period was from 10 September to 20 September 2019.
4. Discussion
Ionospheric refraction error is one of the main error sources in GNSS positioning, and the first–order ionospheric term can reach several meters or even tens of meters because it is frequency dependent and can be eliminated using an IF–LC model at different frequencies [
25,
26].
However, for the SF PPP, ionospheric models need to be used for correcting ionospheric propagation errors. In
Section 3.2.2, we used the Klobuchar model [
27] because it is simple and parameters can be obtained in the broadcast ephemerides; therefore, we can calculate the ionospheric propagation errors in real time. However, this model only offers 50–75% accuracy for ionospheric corrections, and the accuracy is lower at high latitudes [
28]. The IGS developed and published RTCM–SSR messages for vertical total–electron–content (VTEC) ionospheric messages in October 2020 [
29], which means that the grid ionospheric model (GIM) information will be released in real time, effectively improving the positioning accuracy of single–frequency receiver users in the NEP.
However, IGS does not provide real–time GIM products in SSR formats; therefore, we used the post–processing GIM products provided by the Chinese Academy of Sciences [
30] to simulate real–time VTEC ionospheric messages.
After obtaining the ionospheric grid file, the interpolation method can be used to obtain the TEC values at time
t:
where
and
are the longitude and latitude of the satellite signal ionospheric pierce point (IPP), and
and
are the provided TEC data at time
and
. Then, the vertical ionospheric delay
can be calculated as follows:
Finally, the slant ionospheric delay
I can be expressed as:
where
is the zenith at IPP. Substituting Equation (14) into the SF–PPP model (Equation (1)), the user’s real–time coordinates can be obtained.
We performed the two aforementioned SF RT–PPP scenarios, including the Klobuchar– and GIM–based models, to examine and compare the effectiveness of ionospheric products.
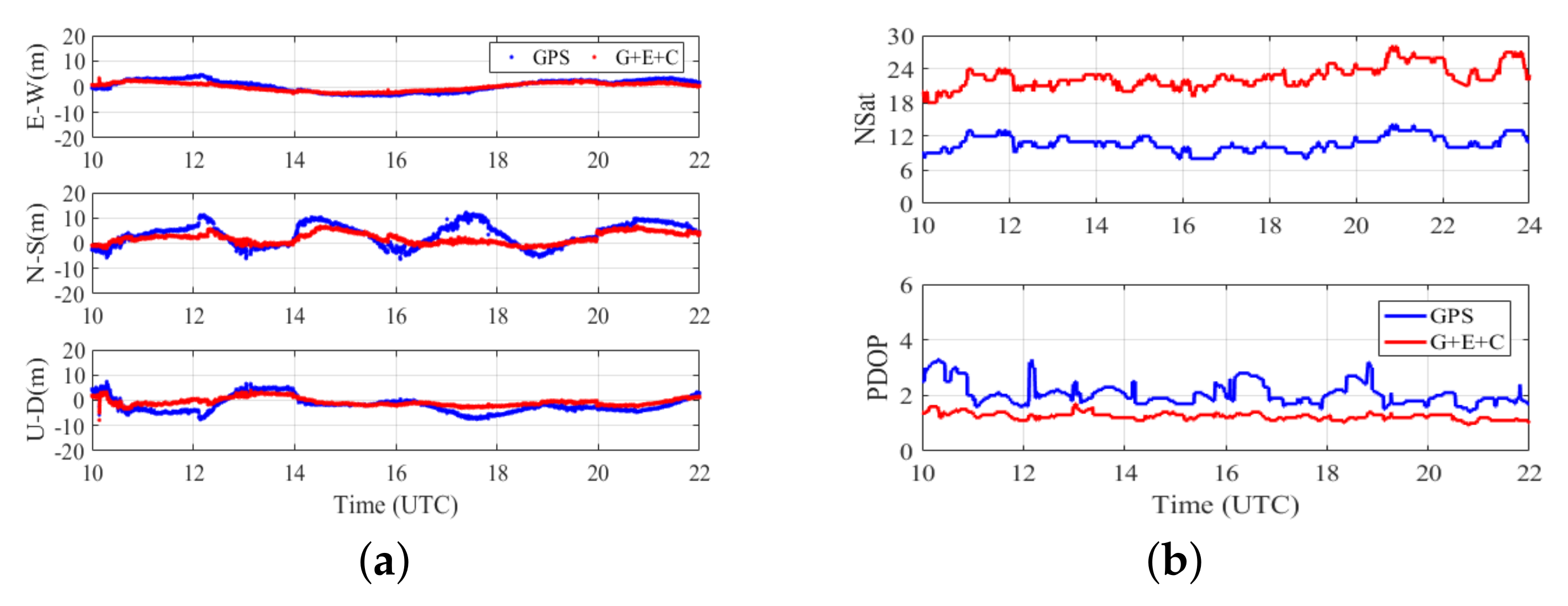
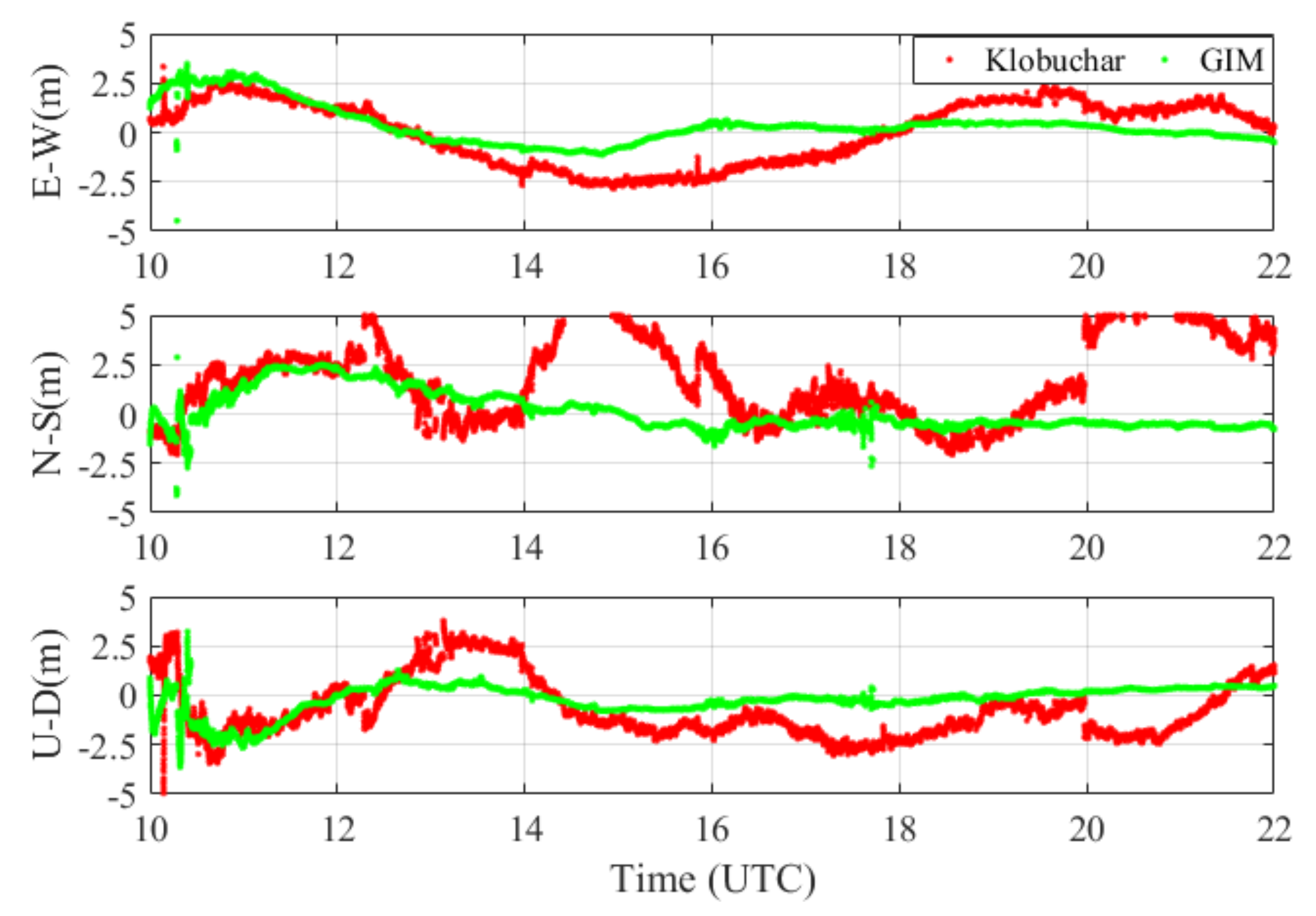
Figure 13 shows the east/north/up–coordinate solutions of the two scenarios utilizing the GPS/Galileo/BDS combination from 10:00 to 22:00 on 12 September 2019, while the GIM– and Klobuchar–based SF RT–PPP models are shown in green and red, respectively. We determined that the positioning accuracy can be considerably improved by using GIM products, especially in the north component.
Table 8 summarizes the RMS values in each direction of the two aforementioned SF RT–PPP methods. Compared with the accuracy of 4.365 m and 2.630 m for the horizontal and vertical components derived from Klobuchar–based RT–PPP solutions, the results of the GIM–based solutions show improvements of 1.440 m and 0.863 m, which is approximately 67.0% and 67.2%. The positioning accuracy for the 3D component improves from 5.096 m with the Klobuchar–based solutions to 1.649 m with the GIM–based solutions—an improvement of 66.7%.
In conclusion, if the real–time IGS ionospheric products are used, single–frequency receiver users will be able to achieve 1–meter–level or higher positioning accuracy in the NEP.
5. Conclusions
GNSS is one of the most widely used positioning methods in the Arctic regions. The main algorithm used in the polar regions is GNSS single–point positioning (SPP); however, its meter–level positioning accuracy is poor. Furthermore, its precision cannot meet the requirements of some Arctic projects, e.g., precise oil drilling. Precise point positioning (PPP) can achieve sub–decimeter and centimeter–level positioning accuracy using one GNSS receiver. Some scholars have researched PPP algorithms in the polar regions; however, it still cannot meet the requirements of real–time positioning due to the several–day latency of the precise ephemeris. Few scholars have studied RT–PPP because of its lack of reliable communication links. Nevertheless, real–time services provided by IGS and easy–access satellite communication systems available in the NEP have opened the opportunity for precise multi–GNSS products in real–time. Therefore, in our paper, we analyzed the use of RT–PPP in the Arctic NEP.
We evaluated the positioning performance of RT–PPP in the NEP during the period between 10 September and 20 September 2019. Moreover, we collected our GNSS data using a U–blox F9P receiver installed on the M/V TIANHUI.
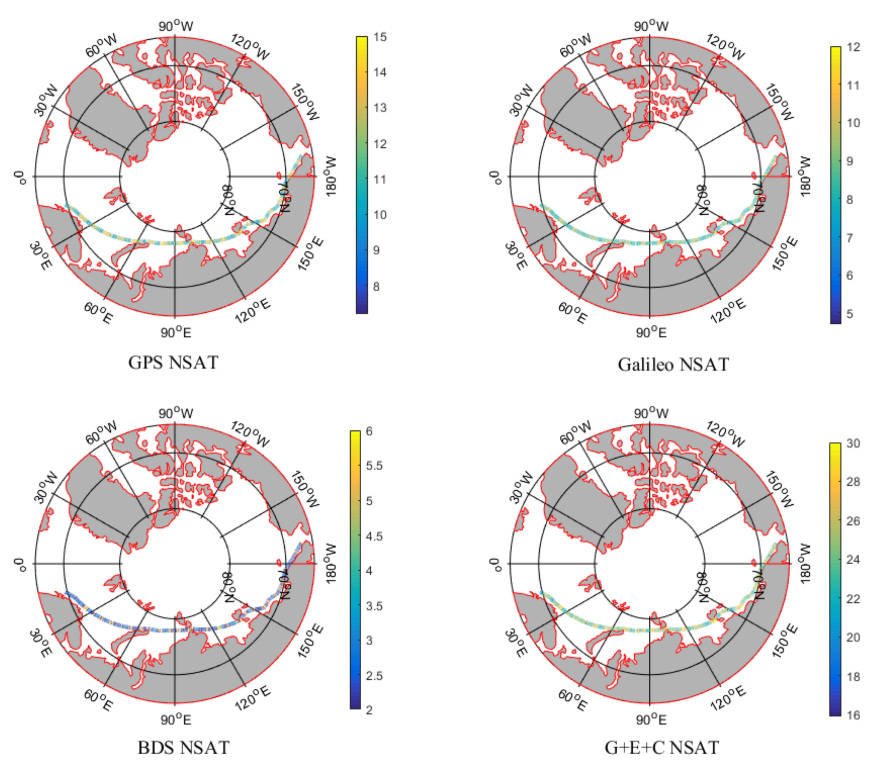
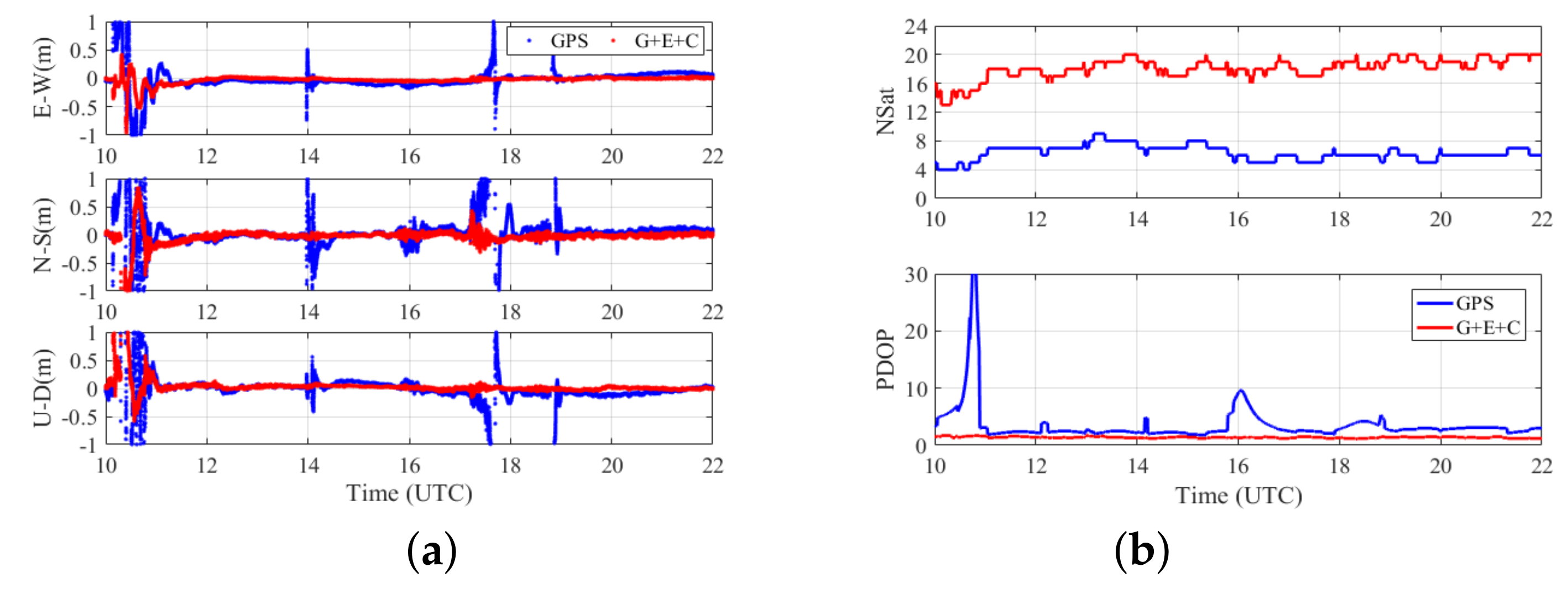
We also evaluated the satellite signal quality. Our results show that the maximum satellite evaluations vary considerably with latitude for GPS and Galileo, while BDS is less sensitive to latitude changes due to the contribution of BDS IGSO. PDOP is usually inversely proportional to NSAT, reflecting the quality of the satellite structure. We found that the NSAT for GPS and Galileo is larger than that of BDS; as a result, PDOP for GPS and Galileo is lower and more stable. Moreover, the above three systems have a total of 24 satellites that yield the smallest PDOP values. We also observed consistent daily SNR values prone to environmental changes. On the other hand, multipath errors showed large variations over different bands, as well as environmental changes, where the differences sometimes reached the decimeter level.
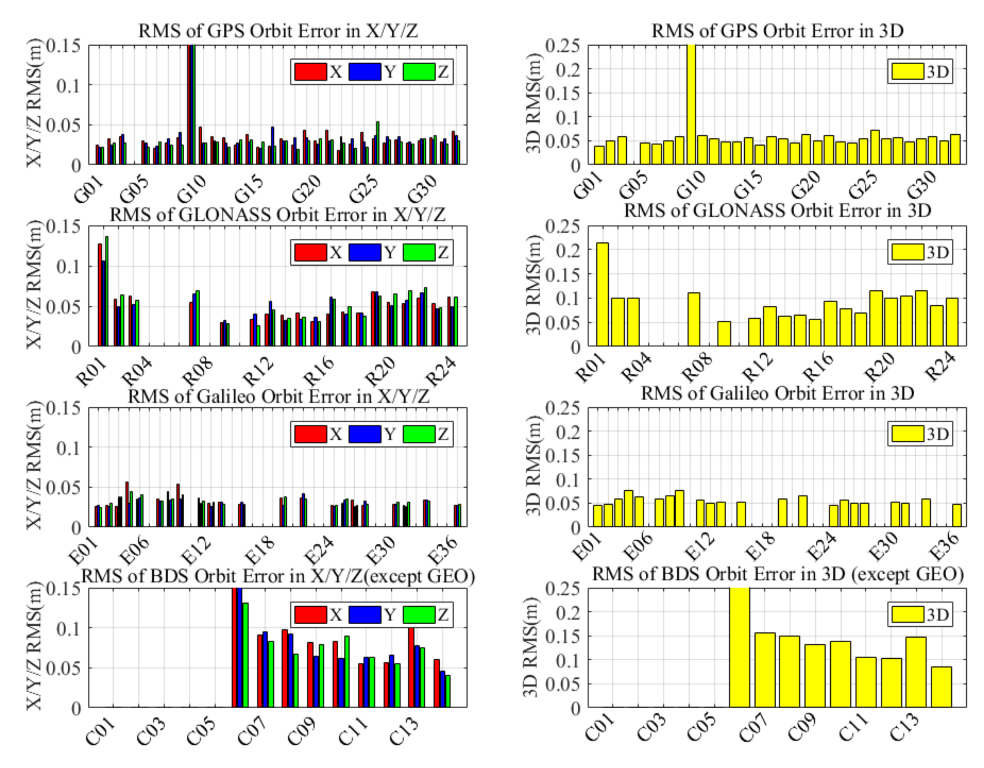
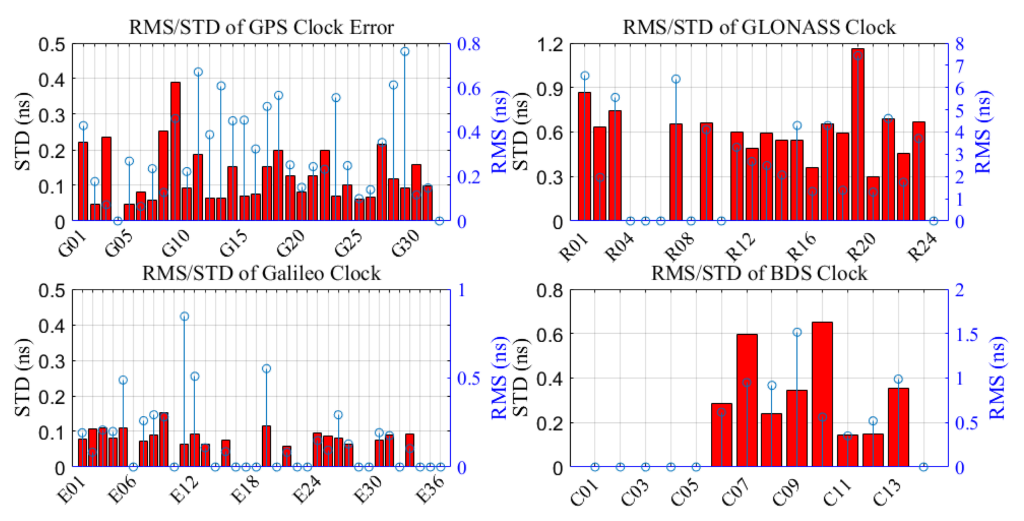
In addition to the satellite signal quality, the real–time SSR corrections also affected the positioning performance. We used CLK93 products, which include multi–GNSS correction information, and investigated their performance over an 11–day testing period. Our results show that Galileo has the best performance, both in satellite orbit and clock, which are approximately 0.056 m in 3D and 0.084 ns, respectively. GPS shows comparable performance to Galileo, with 0.063 m in the 3D component and 0.130 ns for the real–time clock. BDS and GLONASS show some disadvantages, with BDS exhibiting the lowest orbit accuracy of 0.142 m, while GLONASS yielded the worst satellite clock of 0.623 ns.
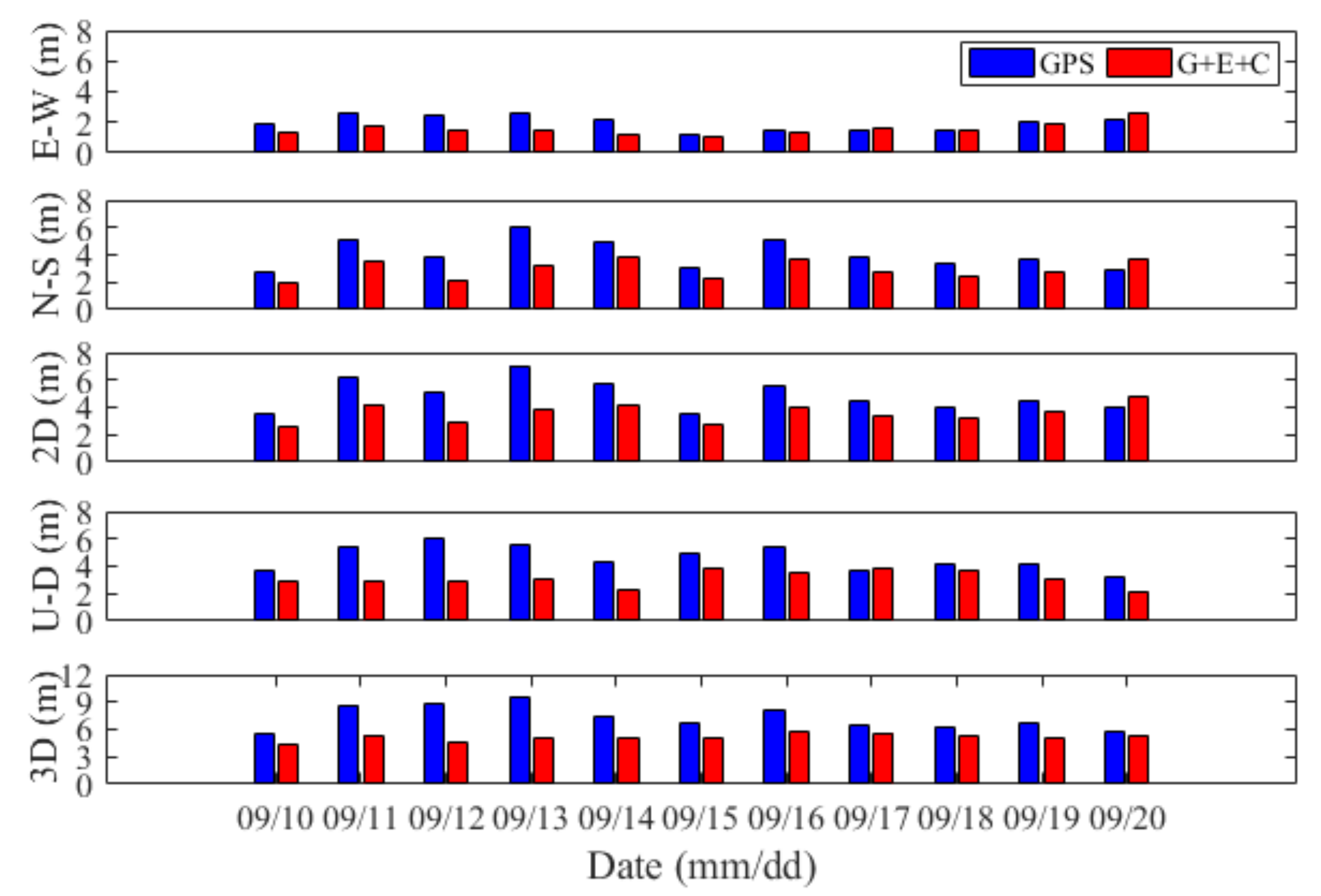
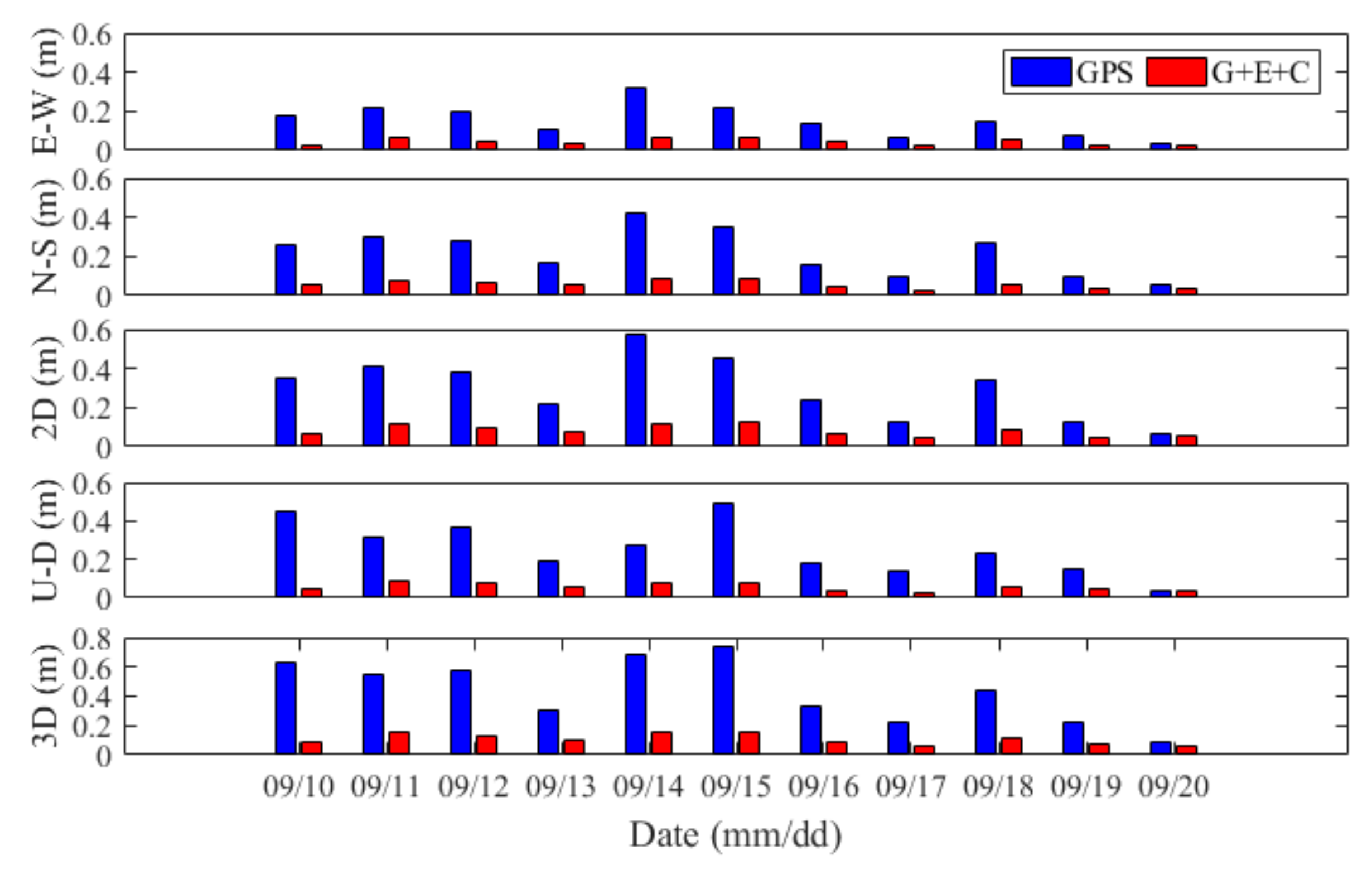
As for the RT–PPP performance in the NEP, 1–meter–level positioning accuracy can be achieved with GIM–based SF RT–PPP, while the DF RT–PPP model reaches a sub–decimeter and centimeter–level accuracy. With a multi–GNSS combination, we can further improve the precision of the RT–PPP for both SF and DF models. Furthermore, with multi–GNSS, the average RMS value in the horizontal(vertical) direction is 0.080(0.057) m, a 70% improvement over single–GPS solutions. However, due to the complexity of the marine environment, fault observation data may appear. Therefore, we will carry out more effective fault detection in our future research to further improve the reliability of RT–PPP in the Arctic region [
31,
32].

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}