
Experimental Study on Impact Friction Damage of Sweet Potato Skin


Abstract
:1. Introduction
2. Materials and Methods
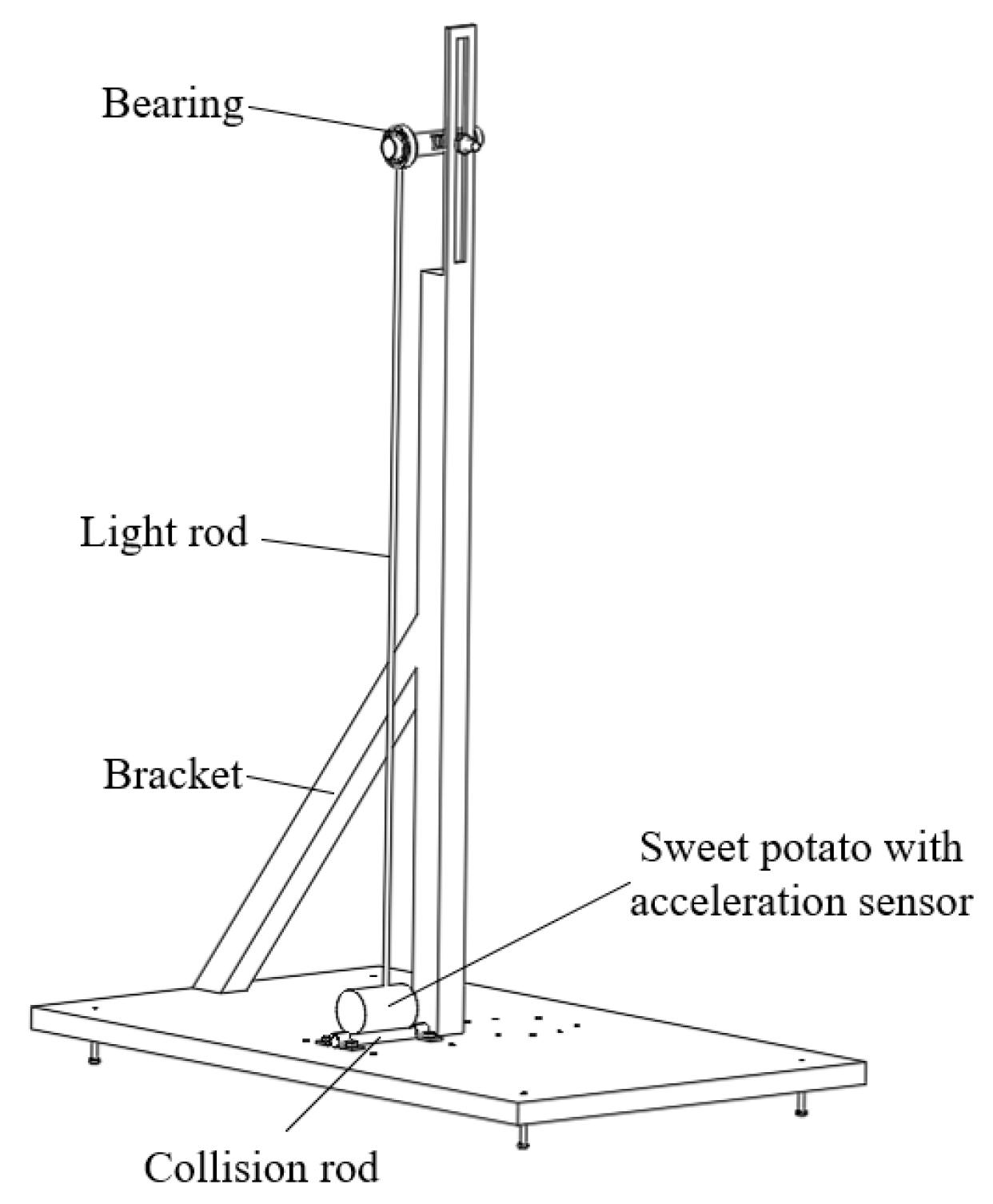
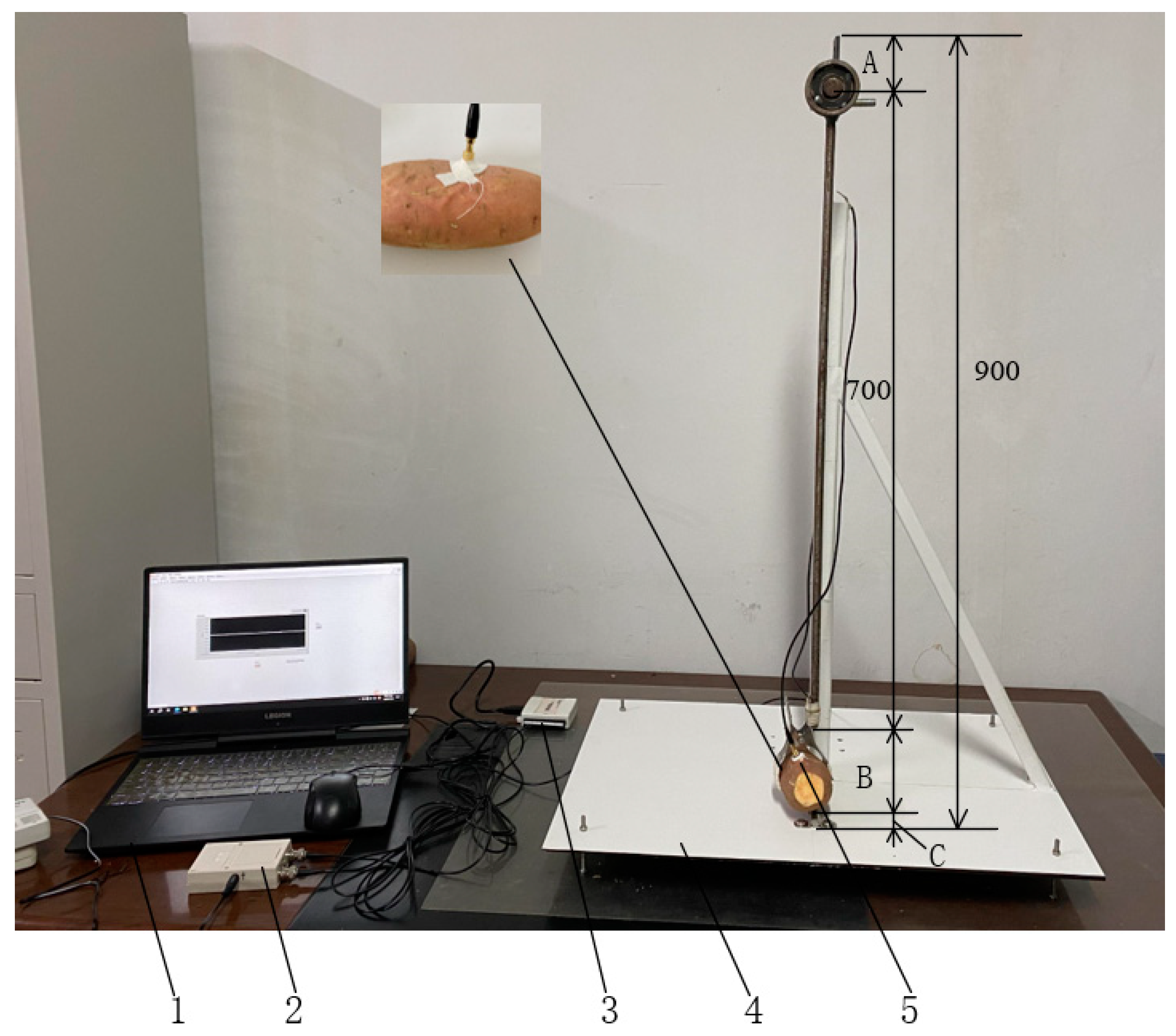
2.1. Test Apparatus
2.2. Impact Friction Analysis
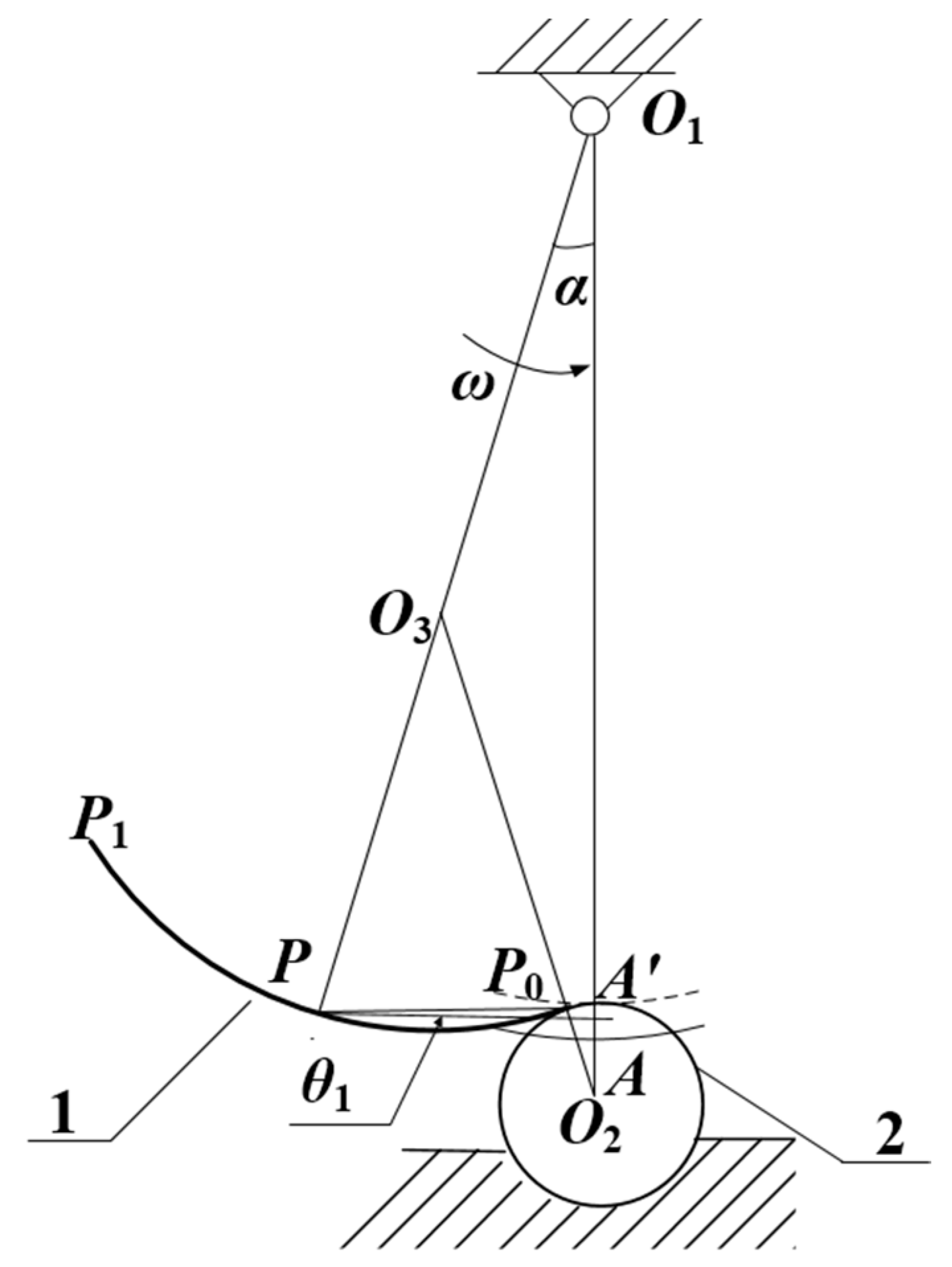
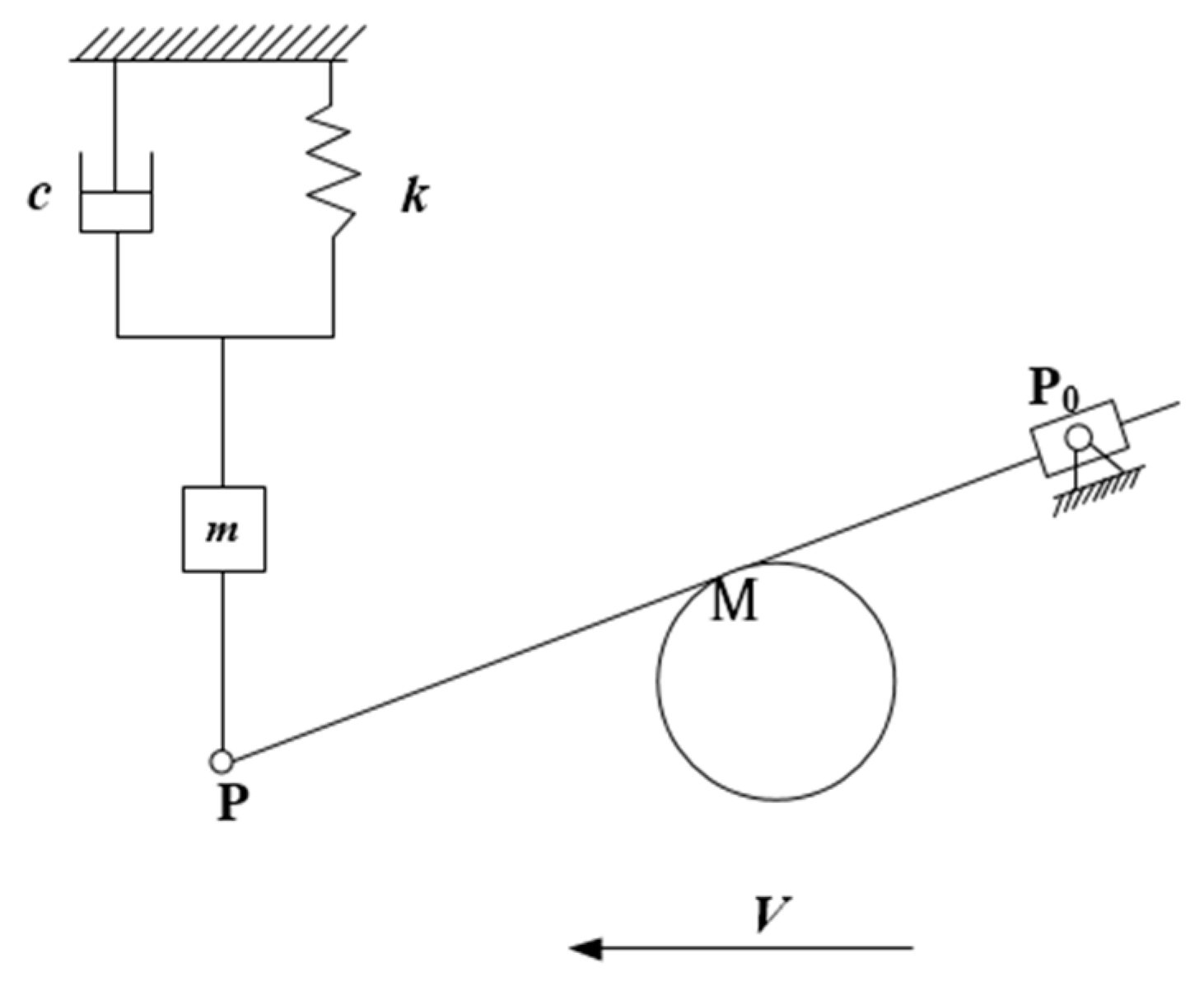
2.2.1. Establishment of Collision Physical Model
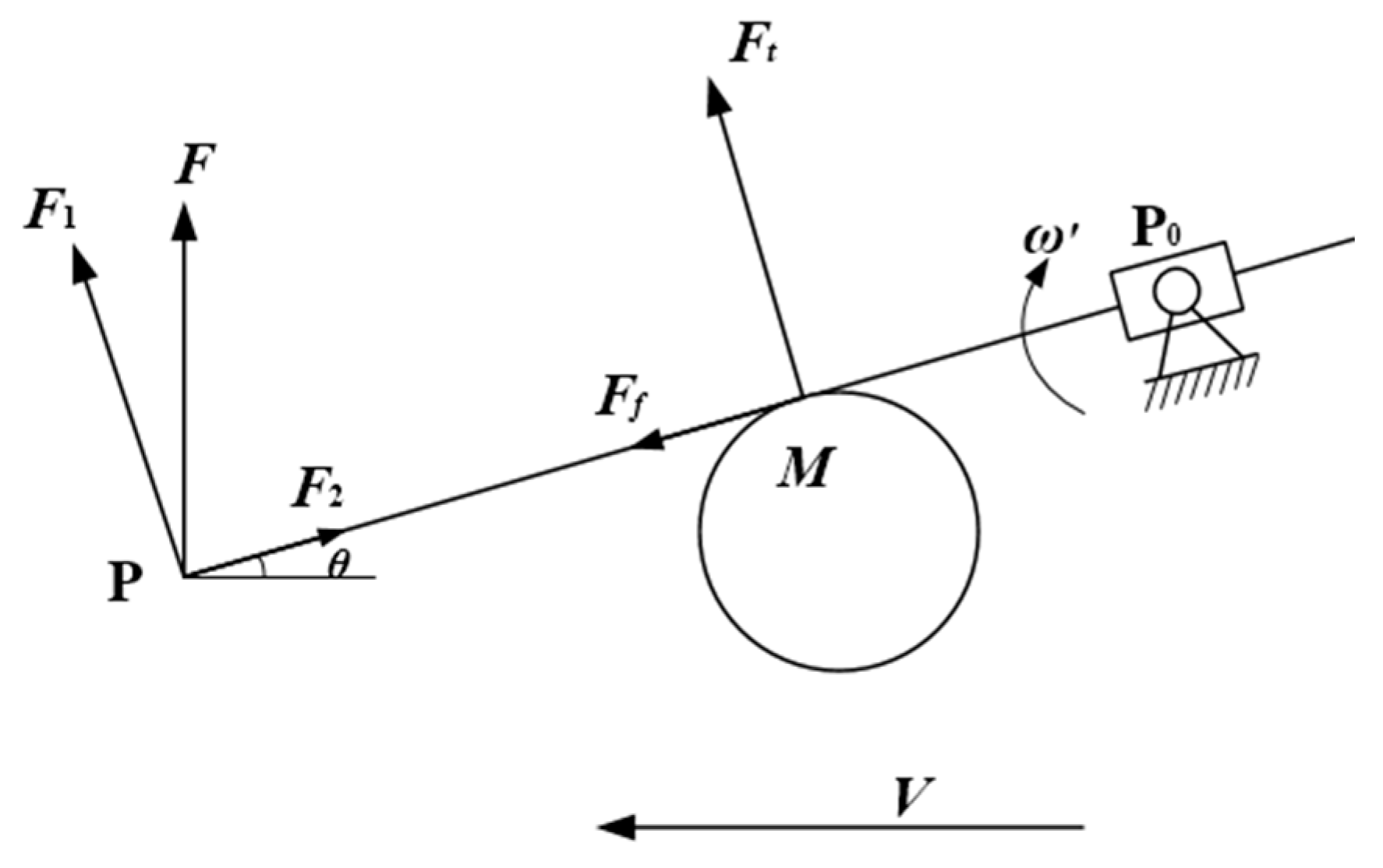
2.2.2. Solution of Friction Ff on the Collision Surface of Sweet Potato
2.3. Test System
2.4. Test Scheme
3. Results and Discussion
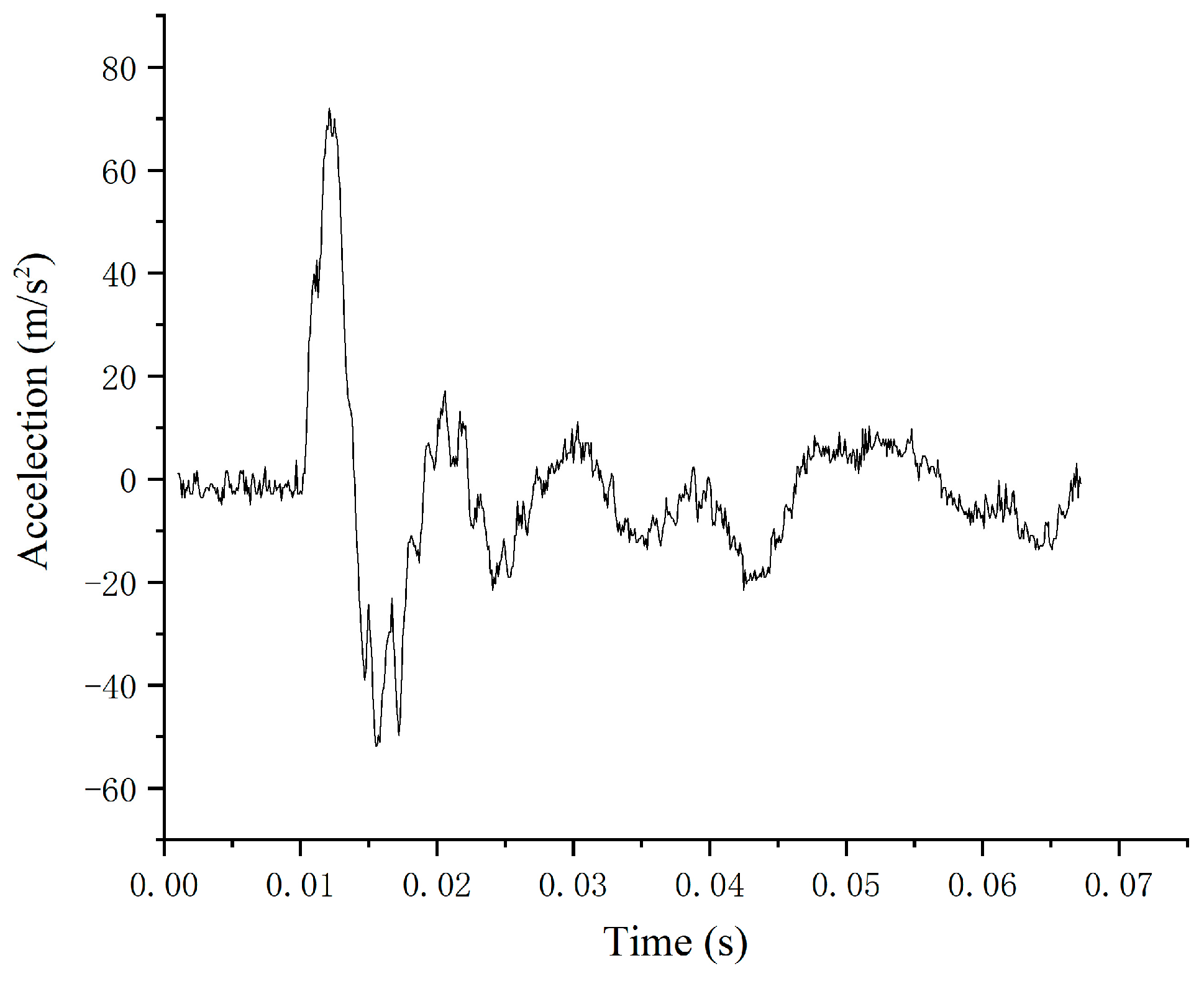
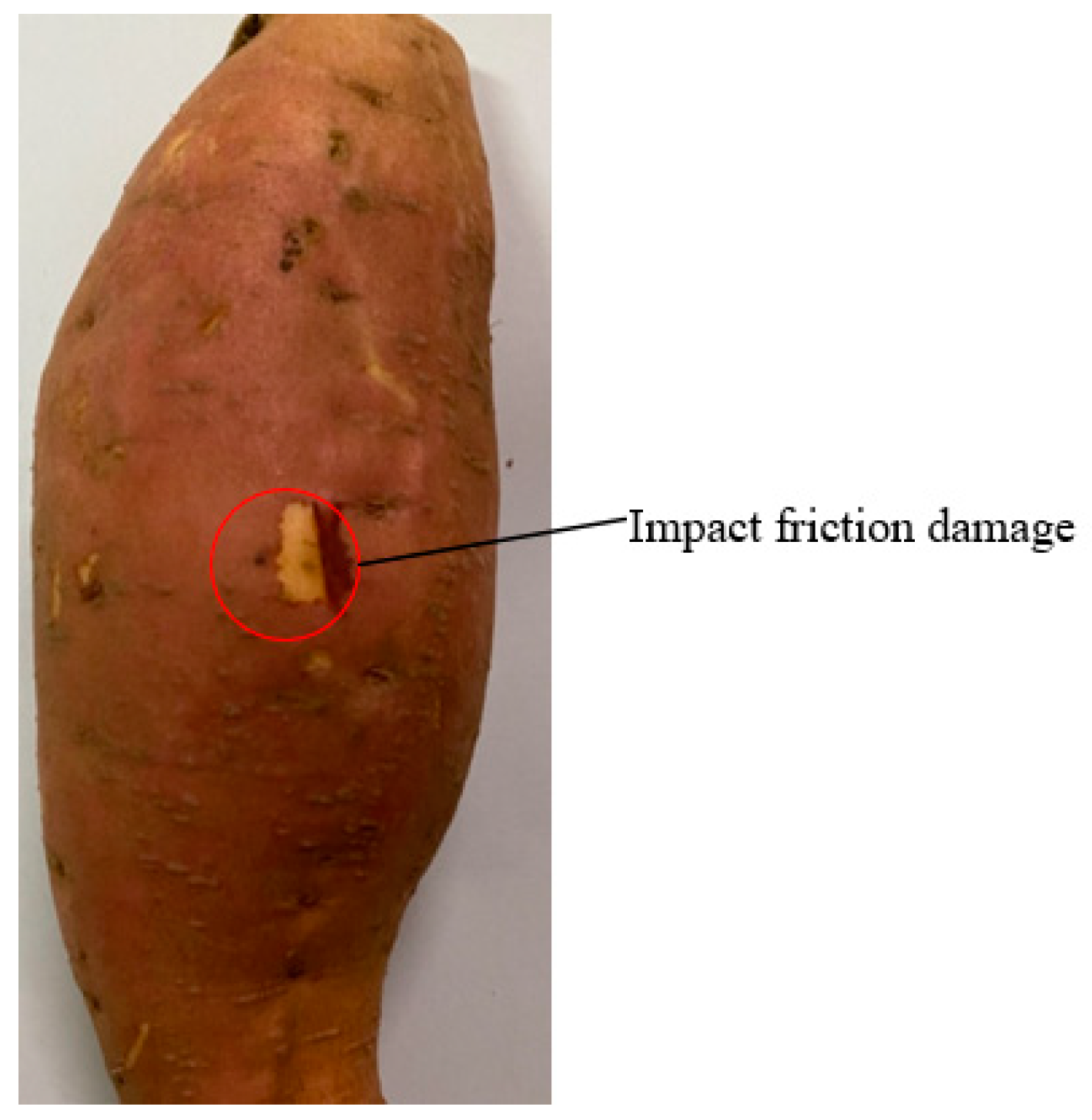
3.1. Impact Friction of Sweet Potato Skin
3.2. Analysis of Critical Damage Acceleration of Sweet Potato Skin
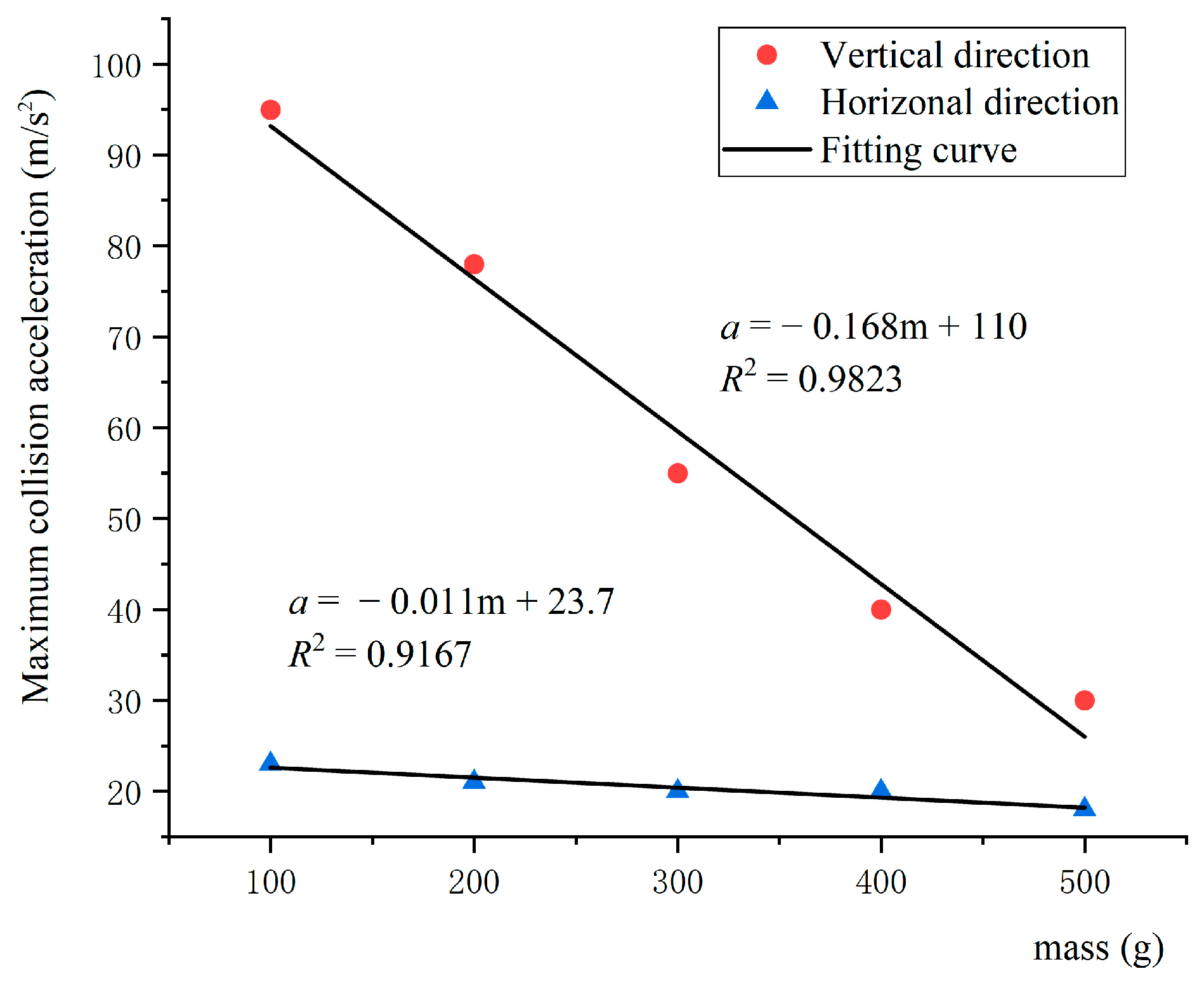
3.2.1. Effects of Sweet Potato Mass and Rod Direction on Critical Damage Acceleration of Sweet Potato Skin
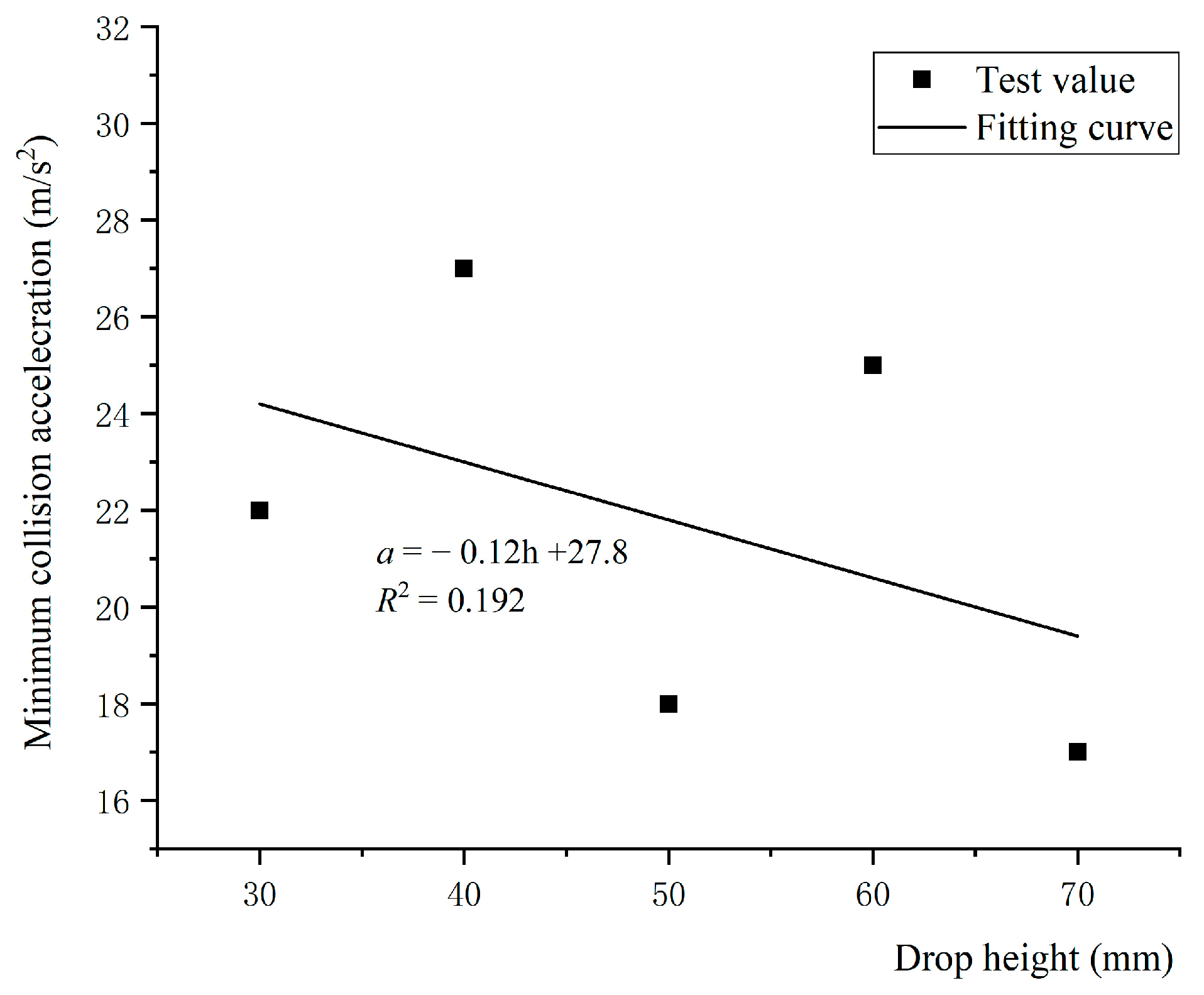
3.2.2. Effect of Initial Height on Critical Damage Acceleration of Sweet Potato Skin
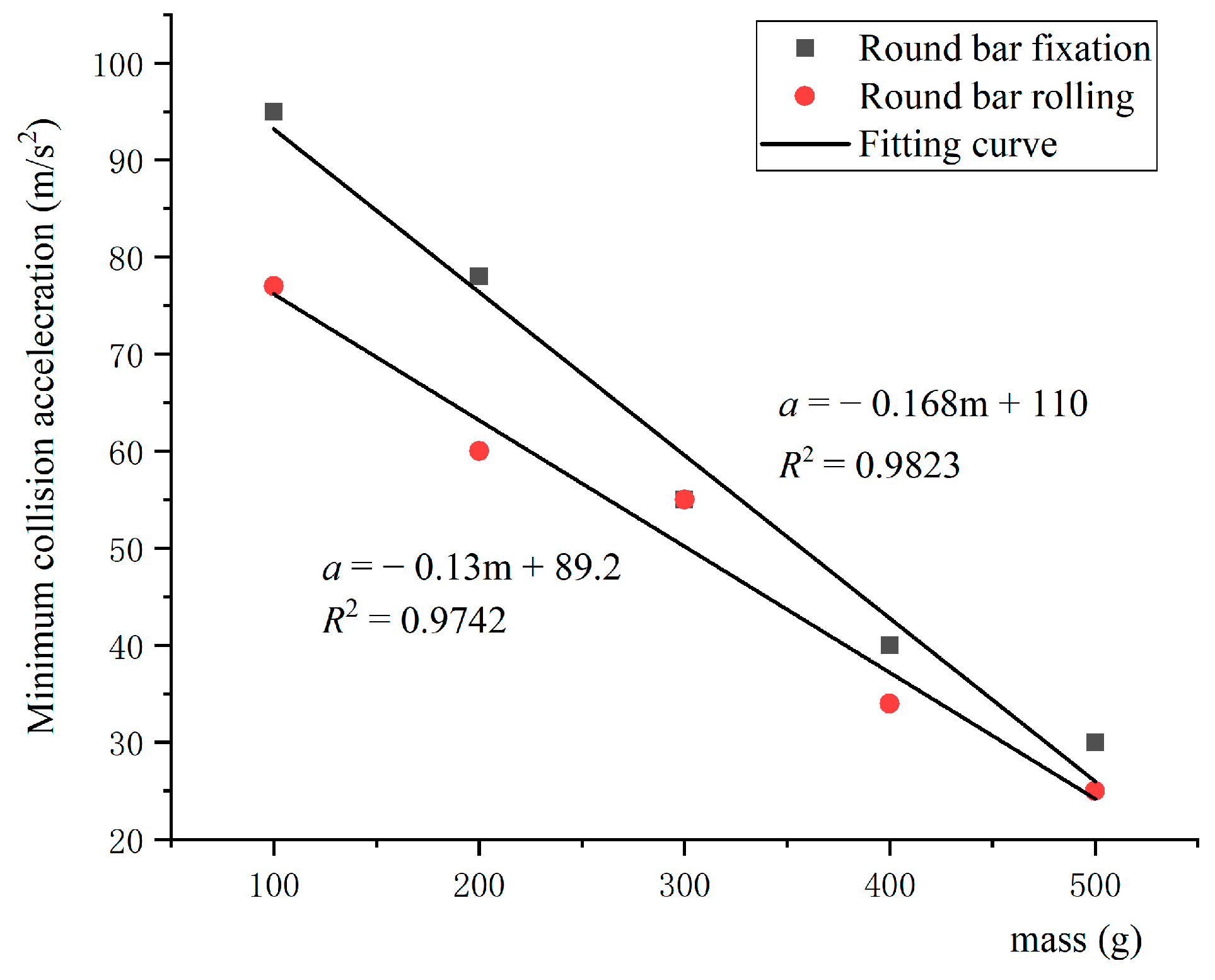
3.2.3. Influence of Rod State on Critical Damage Acceleration of Sweet Potato Skin
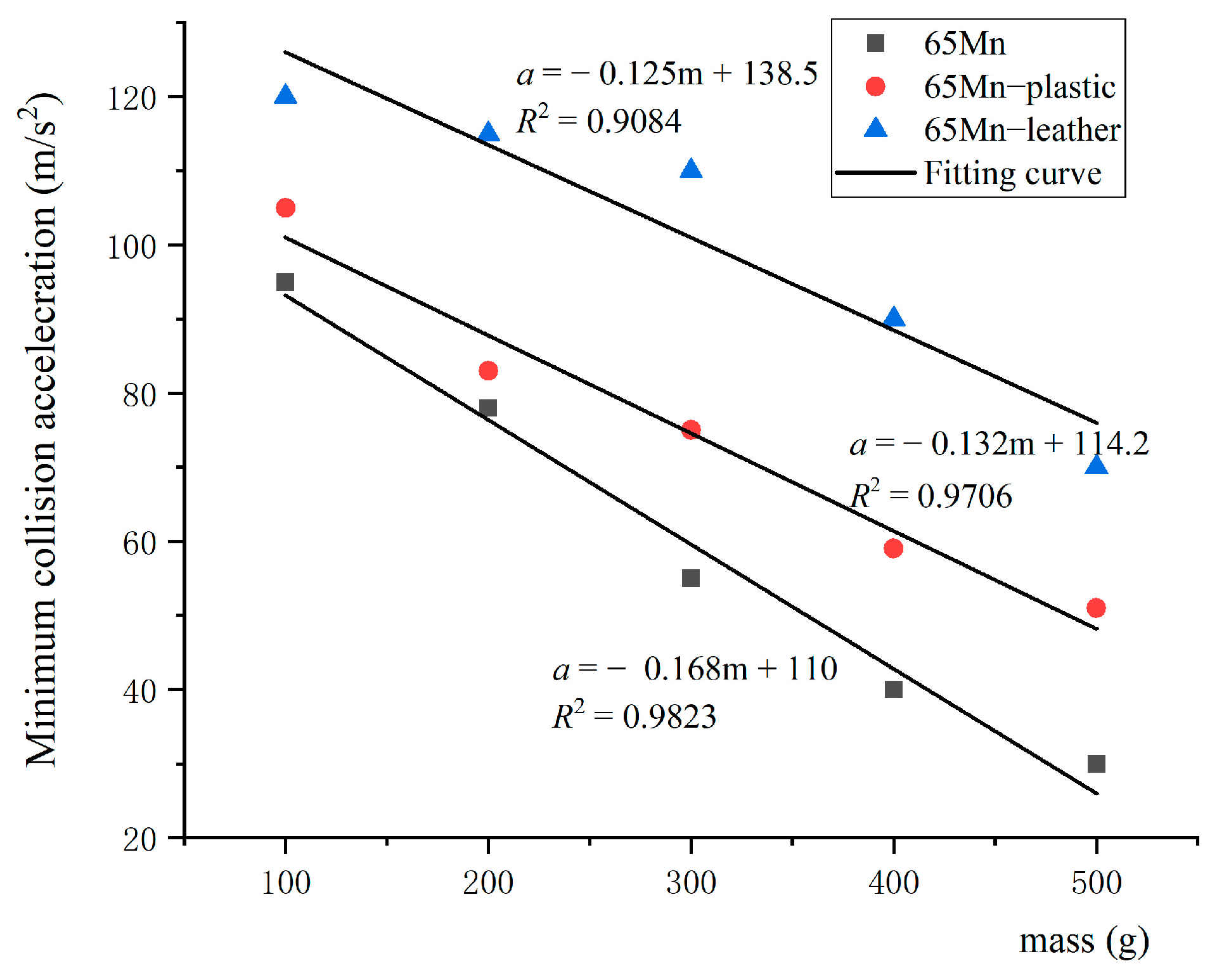
3.2.4. Influence of Rod Material on Critical Damage Friction Acceleration of Sweet Potato Skin
3.3. Regression Analysis of Test Factors and Critical Damage Friction Acceleration of Sweet Potato Skin
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, T.; Zhou, J.; Xu, W.; Li, Q.; Zhang, H.; Qin, X.; Li, N.; Li, W.; Guo, D. Development of 4UGS2 type double-row sweet potato harvester. Trans. Chin. Soc. Agric. Eng. 2018, 34, 26–33. [Google Scholar]
- Wang, G.; Wang, B.; Hu, L.; Shi, Z.; Wu, T.; Wan, Y.; Wang, B. Design and experiment for stem lift conveyer of sweet potato multi-line harvester. J. Jiangsu Norm. Univ. (Nat. Sci. Ed.) 2018, 36, 4. [Google Scholar]
- Yan, W.; Zhang, W.; Hu, M.; Ji, Y.; Li, K.; Qi, B. Present situation of research and expectation on plant mechanization of sweet potato in China and abroad. J. Chin. Agric. 2018, 39, 12–16. [Google Scholar]
- Feng, B.; Sun, W.; Sun, B.; Zhang, T.; Wu, J.; Shi, L. A study on dropping impact characteristics and damage regularity of potato tubers during harvest. J. Vib. Shock 2019, 38, 267–274. [Google Scholar]
- Han, Y.; Qu, X.; Huang, D.; Wu, L. Harvest loss rate of sweet potato and its influencing factors. Southwest China J. Agric. Sci. 2019, 32, 1383–1390. [Google Scholar]
- Gakige, J.; Gachuri, C.; Butterbach-Bahl, K.; Goopy, J. Early vine harvesting of dual-purpose sweet potato (Ipomoea batatas) increases feeding quality and total biomass without comprising tuber production. Afr. J. Food Agric. Nutr. Dev. 2020, 20, 15538–15548. [Google Scholar] [CrossRef]
- Liu, C. Study on Design and Damage Law of Sweet Potato Combine Harvester. Master’s Thesis, Shandong Agricultural University, Tai’an, China, 2021. [Google Scholar]
- Rahmawati, N.; Sipayung, R.; Widya, R. Analysis of yields quantity and quality of several sweet potatoes genotypes at different harvest ages. IOP Conf. Ser. Earth Environ. Sci. 2021, 782, 042047. [Google Scholar] [CrossRef]
- Xing, K.; Li, T.J.; Liu, Y.F.; Zhang, J.; Zhang, Y.; Shen, X.Q.; Li, X.Y.; Miao, X.M.; Feng, Z.Z.; Peng, X. Antifungal and eliciting properties of chitosan against Ceratocystis fimbriata in sweet potato. Food Chem. 2018, 268, 188–195. [Google Scholar] [CrossRef]
- Musyoka, J.N.; Abong, G.O.; Mbogo, D.M.; Fuchs, R.; Low, J.; Heck, S.; Muzhingi, T. Effects of acidification and preservatives on microbial growth during storage of orange fleshed sweet potato puree. Int. J. Food Sci. 2018, 2018, 8410747. [Google Scholar] [CrossRef]
- Dou, Q.; Sun, Y.; Sun, Y.; Shen, J.; Li, Q. Current situation and development of potato harvesting machinery at home and abroad. J. Chin. Agric. Mech. 2019, 40, 206–210. [Google Scholar] [CrossRef]
- Feng, B. Study on Physical Characteristics and Damage Mechanism of Potato Tuber during Harvest. Ph.D. Thesis, Gansu Agricultural University, Lanzhou, China, 2018. [Google Scholar]
- Geyer, M.; Praeger, U.; König, C.; Graf, A.; Truppel, I.; Schlüter, O.; Herold, B. Measuring behavior of an acceleration measuring unit implanted in potatoes. Trans. ASABE 2009, 52, 1267–1274. [Google Scholar] [CrossRef]
- Rady, A.M.; Soliman, S.N. Evaluation of mechanical damage of Lady Rosetta potato tubers using different methods. Int. J. Postharvest Technol. Innov. 2015, 5, 125–148. [Google Scholar] [CrossRef]
- Danila, D.M. Assessing the potato impact response using a pendulum controlled and designed by computer. Bull. Transilv. Univ. Brasov. Ser. II For. Wood Ind. Agric. Food Eng. 2015, 8, 65–70. [Google Scholar]
- Thomson, G.E.; Lopresti, J.P. Size and temperature characteristics of potatoes help predict injury following impact collisions. N. Z. J. Crop Hortic. Sci. 2018, 46, 1–17. [Google Scholar] [CrossRef]
- Sibirev, A.; Aksenov, A.; Dorokhov, A.; Ponomarev, A. Comparative study of the force action of harvester work tools on potato tubers. Res. Agric. Eng. 2019, 65, 85–90. [Google Scholar] [CrossRef]
- Gao, G.; Xie, H.; Li, B.; Tian, B.; Zhang, S. Experimental study and analysis on collision damage of sweet potato in drop. J. Chin. Agric. Mech. 2019, 40, 85–90. [Google Scholar]
- Xie, S.; Wang, C.; Deng, W. Collision damage test and acceleration characteristic analysis of potato. J. China Agric. Univ. 2020, 25, 163–169. [Google Scholar]
- Fincan, M.; Dejmek, P. Effect of osmotic pretreatment and pulsed electric field on the viscoelastic properties of potato tissue. J. Food Eng. 2003, 59, 169–175. [Google Scholar] [CrossRef]
- Bajema, R.W.; Hyde, G.M.; Baritelle, A.L. Turgor and temperature effects on dynamic failure properties of potato tuber tissue. Trans. ASAE 1998, 41, 741–746. [Google Scholar] [CrossRef]
- Azizi, P.; Sakenian Dehkordi, N.; Farhadi, R. Design, construction and evaluation of potato digger with rotary blade. Cercet. Agron. Mold. 2014, 47, 5–13. [Google Scholar] [CrossRef]
- Deng, W. Study on the Collision Damage Characteristics and Peel Friction Damage Mechanisms of Potato Tubers. Ph.D. Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2021. [Google Scholar]
- Ma, Z. Studies on Friction and Particles’ Motion of Bionic Anti-Clogging Screening Process in Agricultural Materials. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2015. [Google Scholar]
- Xie, S.; Wang, C.; Deng, W. Experimental study on collision acceleration and damage characteristics of potato. J. Food Process Eng. 2020, 43, e13457. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Sweet Potato Mass (g) | Initial Altitude (mm) | Rod Direction | Rod Condition | Rod Material |
|---|---|---|---|---|---|
| 1 | 100 | ||||
| 2 | 200 | ||||
| 3 | 300 | 80 | Horizontal | Static | 65Mn |
| 4 | 400 | ||||
| 5 | 500 | ||||
| 6 | 30 | ||||
| 7 | 40 | ||||
| 8 | 250 | 50 | Horizontal | Static | 65Mn |
| 9 | 60 | ||||
| 10 | 70 | ||||
| 11 | 100 | ||||
| 12 | 200 | ||||
| 13 | 300 | 80 | Vertical | Static | 65Mn |
| 14 | 400 | ||||
| 15 | 500 | ||||
| 16 | 100 | ||||
| 17 | 200 | ||||
| 18 | 300 | 80 | Vertical | Rolling | 65Mn |
| 19 | 400 | ||||
| 20 | 500 | ||||
| 21 | 100 | ||||
| 22 | 200 | ||||
| 23 | 300 | 80 | Vertical | Static | 65Mn–leather |
| 24 | 400 | ||||
| 25 | 500 | ||||
| 26 | 100 | ||||
| 27 | 200 | ||||
| 28 | 300 | 80 | Vertical | Static | 65Mn–plastic |
| 29 | 400 | ||||
| 30 | 500 |
| Number | Rod Radius | The Sweet Potato Curvature Radius | Maximum Elastic Displacement | Pivot to Sweet Potato Lowest Point | Drop Height | Sweet Potato Mass | Test Value | Friction Force |
|---|---|---|---|---|---|---|---|---|
| R1 (mm) | R2 (mm) | λ (mm) | L (mm) | H (mm) | m (g) | Δt (ms) | Ff (N) | |
| 1 | 5 | 23 | 2 | 751 | 800 | 100 | 2.1 | 3.5 |
| 2 | 5 | 25 | 2 | 765 | 800 | 100 | 1.9 | 3.8 |
| 3 | 5 | 30 | 2 | 760 | 800 | 200 | 2.2 | 6.6 |
| 4 | 5 | 25 | 2 | 777 | 800 | 200 | 2.7 | 5.4 |
| 5 | 5 | 30 | 2 | 761 | 800 | 300 | 2 | 11 |
| 6 | 5 | 31 | 2 | 763 | 800 | 300 | 2.9 | 7.5 |
| 7 | 5 | 33 | 2 | 781 | 800 | 400 | 2.5 | 11.8 |
| 8 | 5 | 37 | 2 | 771 | 800 | 400 | 2 | 14.7 |
| 9 | 5 | 34 | 2 | 786 | 800 | 500 | 2.4 | 15.3 |
| 10 | 5 | 44 | 2 | 790 | 800 | 500 | 3.1 | 11.8 |
| Experimental Factor | Rod Parameter | Regression Equation | Correlation Coefficient (R2) |
|---|---|---|---|
| Sweet potato quality (g) | Horizontal-Static-65Mn | a = −0.011m + 23.7 | 0.9167 |
| Drop height (mm) | Horizontal-Static-65Mn | a = −0.12h + 27.8 | 0.192 |
| Sweet potato quality (g) | Vertical-Static-65Mn | a = −0.168m + 110 | 0.983 |
| Sweet potato quality (g) | Vertical-Rolling-65Mn | a = −0.13m + 89.2 | 0.974 |
| Sweet potato quality (g) | Vertical-Static-65Mn–leather | a = −0.125m + 138.5 | 0.908 |
| Sweet potato quality (g) | Vertical-Static-65Mn–plastic | a = −0.132m + 114.2 | 0.971 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Qu, Y.; Yin, X.; Liu, H.; Mu, G.; Li, D. Experimental Study on Impact Friction Damage of Sweet Potato Skin. Agriculture 2024, 14, 93. https://doi.org/10.3390/agriculture14010093
Zhang W, Qu Y, Yin X, Liu H, Mu G, Li D. Experimental Study on Impact Friction Damage of Sweet Potato Skin. Agriculture. 2024; 14(1):93. https://doi.org/10.3390/agriculture14010093
Chicago/Turabian StyleZhang, Wanzhi, Yunzhen Qu, Xiubo Yin, Hongjuan Liu, Guizhi Mu, and Dengshan Li. 2024. "Experimental Study on Impact Friction Damage of Sweet Potato Skin" Agriculture 14, no. 1: 93. https://doi.org/10.3390/agriculture14010093