
Study on Vibration Characteristics of Paddy Power Chassis under Different Driving Conditions
Abstract
:1. Introduction
2. Materials and Methods
2.1. Test Equipment
2.2. Test Conditions and Methods
2.3. Methods of Analysis
3. Test Results and Analysis
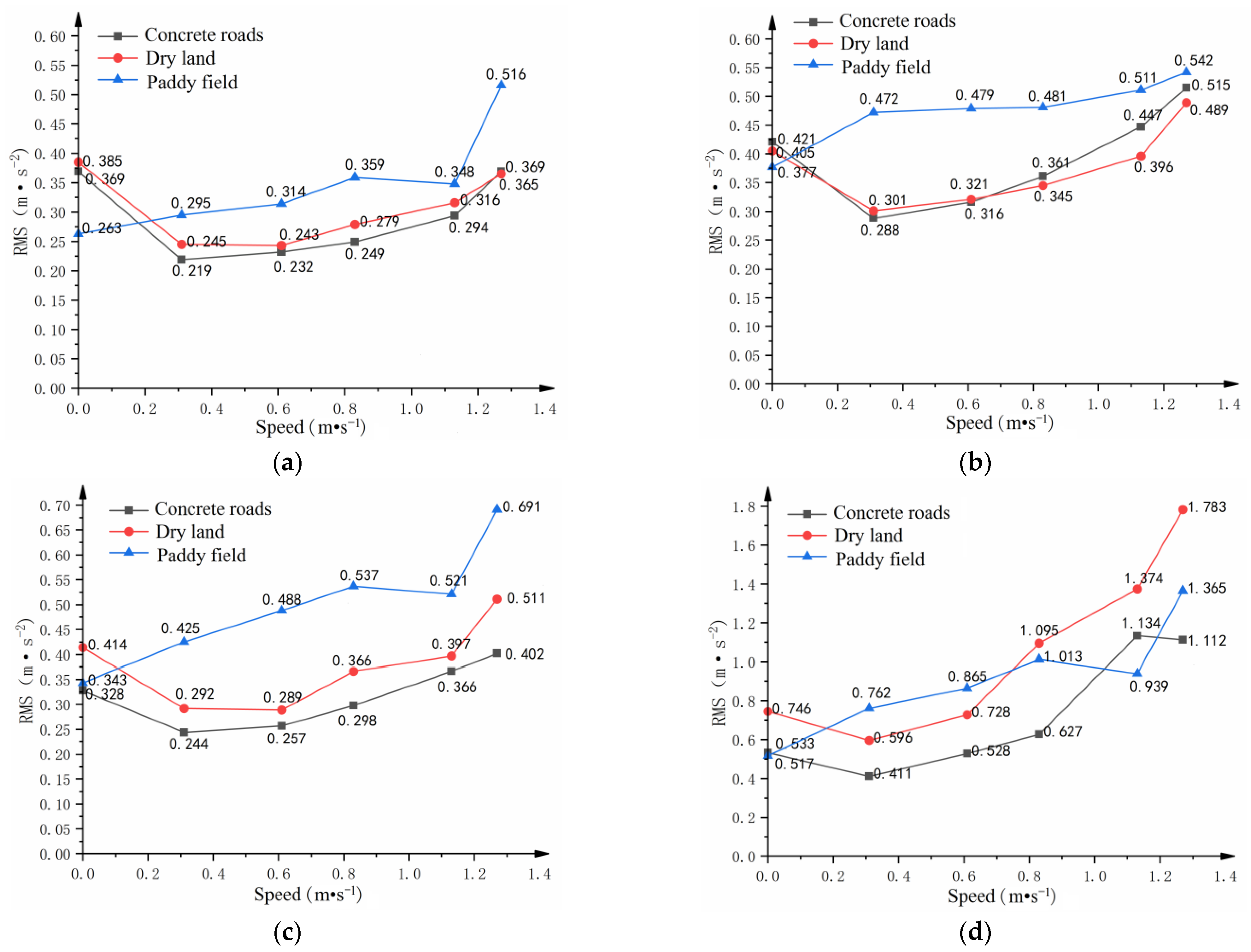
3.1. Vibration Acceleration
3.2. Frequency Domain Analysis
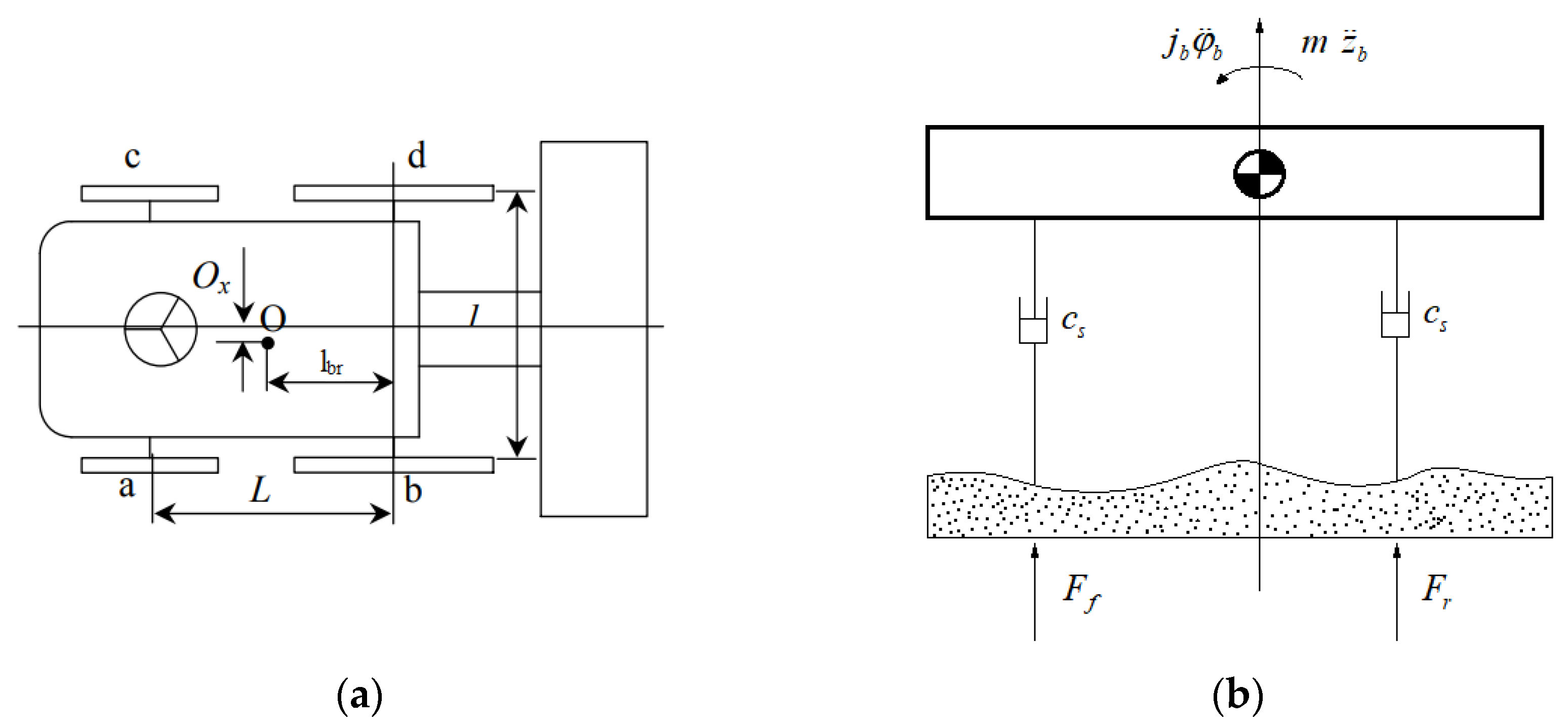
3.3. Front and Rear Dynamic Load Analysis
4. Conclusions
- (1)
- As the traveling speed of the paddy power chassis escalates, the RMS acceleration value across its components also rises. Notably, the RMS acceleration of the front axle exceeds that of the rear, and among the three directional accelerations at the seating position, the vertical acceleration’s RMS value is predominant. Most acceleration RMS values demonstrate a linear correlation with traveling speed, although some display abrupt increases. Comprehensive analysis indicates the highest vibrational acceleration in paddy fields, succeeded by dry land, with the least on concrete paved roads. A noticeable absence of damping in the weighted acceleration at the seat position suggests design deficiencies in the engine suspension damping of the paddy chassis and in the overall vehicle’s front and rear suspensions.
- (2)
- The acceleration power spectrum’s peak frequency predominantly lies within the 1~14 Hz range. Front and rear axles exhibit elevated peak frequencies, while the seating position has generally subdued longitudinal and transverse peak frequencies but heightened in the vertical direction. The power spectrum’s peak value tends to amplify with speed increments.
- (3)
- Road conditions distinctly influence the dynamic load factor of paddock chassis tires. Specifically, dry or paddy pavements can amplify the vehicle’s shock and vibration, thereby increasing the dynamic load factor. In contrast, smoother concrete surfaces might diminish it. Nevertheless, both the paddy chassis’ front and rear wheels manifest a rising trend in dynamic load factor with speed increments, with the front wheels consistently registering superior values.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Scarlett, A.J.; Price, J.S.; Stayner, R.M. Whole-body vibration: Evaluation of emission and exposure levels arising from agricultural tractors. J. Terramech. 2007, 44, 65–73. [Google Scholar] [CrossRef]
- Torén, A.; Öberg, K.; Lembke, B.; Enlund, K.; Rask-Andersen, A. Tractor-driving hours and their relation to self-reported low-back and hip symptoms. Appl. Ergon. 2002, 33, 139–146. [Google Scholar] [CrossRef] [PubMed]
- Langer, T.H.; Ebbesen, M.K.; Kordestani, A. Experimental analysis of occupational whole-body vibration exposure of agricultural tractor with large square baler. Int. J. Ind. Ergon. 2015, 47, 79–83. [Google Scholar] [CrossRef]
- Zhu, S.; Zhu, Y. Effects of tyre inflation pressure and forward speed on vibration of an unsuspended tractor. J. Terramech. 2013, 50, 185–198. [Google Scholar]
- Soane, B.D.; Ouwerkerk, C.V. Soil Compaction in Crop Production; Elsevier: Amsterdam, The Netherlands, 2013; pp. 198–234. [Google Scholar]
- Abu-Hamdeh, N.H.; Abu-Ashour, J.S.; Al-Jalil, H.F. Soil physical properties and infiltration rate as affected by tire dynamic load and inflation pressure. Trans. ASAE 2000, 34, 785–792. [Google Scholar] [CrossRef]
- Lou, S.; Xu, C. Measurement system for ride comfort of tractor seats. Trans. Chin. Soc. Agric. Mach. 2004, 35, 35–36. [Google Scholar]
- Radonjic, R.; Jankovic, A.; Aleksandrovic, B. Effect of Terrain Characteristics on the Tractor Vibration. Poljopr. Teh. 2012, 3, 11–23. [Google Scholar]
- Gomez, M.I.; Hwang, S.; Stark, A.D.; May, J.J.; Hallman, E.M.; Pantea, C.I. An analysis of self-reported joint pain among New York farmers. J. Agric. Saf. Health 2003, 9, 143–157. [Google Scholar] [CrossRef]
- Zhu, S.; Xu, G.; Yuan, J.; Ma, J.; Yi, L.; Li, K. Influence of implements mass on vibration characteristics of tractor-implement system. Trans. Chin. Soc. Agric. Eng. 2015, 30, 30–37, (In Chinese with English abstract). [Google Scholar]
- Servadio, P.; Marsili, A.; Belfiore, N.P. Analysis of driving seat vibrations in high forward speed tractors. Biosyst. Eng. 2007, 97, 171–180. [Google Scholar] [CrossRef]
- Hildebrand, R.; Keskinen, E.; Romero, J.N. Vehicle vibrating on a soft compacting soil half-space: Ground vibrations, terrain damage, and vehicle vibrations. J. Terramech. 2008, 45, 121–136. [Google Scholar] [CrossRef]
- Cheng, J. Research on Vibration Characteristics and Active Vibration Control of High Power Wheeled Tractor Based on Electro-Hydraulic Hitch System; China Agricultural University: Beijing, China, 2016. [Google Scholar]
- Kumar, R.; Verma, A. Impact of soil characteristics on the vibrational efficiency of power chassis in paddy fields. Int. J. Agric. Eng. 2019, 12, 102–110. [Google Scholar]
- Karpenko, M.; Skačkauskas, P.; Prentkovskis, O. Methodology for the Composite Tire Numerical Simulation Based on the Frequency Response Analysis. Eksploat. Niezawodn. 2023, 25, 1–11. [Google Scholar] [CrossRef]
- Chen, H.; Wu, W.W.; Liu, X.T.; Li, H. Effect of wheel traffic on working resistance of agricultural machinery in field operation. Trans. Chin. Soc. Agric. Mach. 2010, 41, 52–57. [Google Scholar]
- Li, Z.; Shi, Y.X.; Jiang, P.; Wu, H.; Lin, W. Design and experimental research of high clearance universal operation chassis. Food Mach. 2018, 34, 100–105. [Google Scholar]
- Wang, W.; Zhao, J.; Shen, C. Design and Experiment of Integrated Test System for Terramechanics Parameters. J. Chin. Agric. Mech. 2017, 48, 72–78. [Google Scholar] [CrossRef]
- Cai, Q.; Ye, Q. Design and test of new self-propelled mountain orchard transport plane. J. Chin. Agric. Mech. 2019, 40, 119–124. [Google Scholar]
- Wang, D.Y.; Qin, D.C. Research on forecast of tractor wheels’ fatigue life based on Elasto-plastic FEM analysis. J. Chin. Agric. Mech. 2017, 38, 97–101. [Google Scholar]
- Zhang, M.H.; Luo, X.W.; Wang, Z.M.; Wang, B.; Xue, Z. Optimization design and experiment of profiling and slide board mechanism of precision rice hill-drop drilling machine. Trans. Chin. Soc. Agric. Eng. 2017, 33, 18–26. [Google Scholar]
- Zhang, M.H.; Xiao, M.; Ouyang, L.; Jiang, E.; Qiao, J.; Wang, M.; Liu, S.; Xu, P.; Luo, X. Optimization design and test of seed protecting structure of combined type-hole metering device. J. South China Agric. Univ. 2021, 42, 99–105. [Google Scholar]
- Liao, Y.T.; Qi, T.X.; Liao, Q.X.; Zeng, R.; Li, C.L.; Gao, L.P. Vibration characteristics of pneumatic combined precision rapeseed seeder and its effect on seeding performance. J. Jilin Univ. (Eng. Technol. Ed.) 2022, 52, 1184–1196. [Google Scholar]
- Xu, L.Z.; Cai, X.Y.; Gao, Z.P.; Li, Y.; Wang, Y. Experimental study on driver seat vibration characteristics of crawler-type combine harvester. Int. J. Agric. Biol. Eng. 2019, 12, 90–97. [Google Scholar] [CrossRef]
- Marsili, A.; Ragni, L.; Santoro, G.; Servadio, P.; Vassalini, G. Vassalini. Innovative systems to reduce vibrations on agricultural tractors: Comparative analysis of acceleration transmitted through the driving seat. Biosyst. Eng. 2002, 81, 35–47. [Google Scholar] [CrossRef]
- Han, Y.; Xiao, H.R.; Song, Z.H.; Ding, W.Q.; Xia, Z.F. Frequency response analysis of bionic tillage. J. Chin. Agric. Mech. 2018, 39, 32–35. [Google Scholar]
- Zhang, H.; Yan, K.; Zhao, X.D. Measuring reverberation time of tractor cab under the influence of noise. J. Chin. Agric. Mech. 2019, 40, 125–128. [Google Scholar]
- Zhang, Z.; Xu, Z.; He, Y. Objective evaluation methods of automobile riding comfort. J. Chongqing Univ. 2010, 33, 14–20. [Google Scholar]
- Do Minh, C.; Zhu, S.; Ngoc, N.T. Study on the variation characteristics of vertical equivalent damping ratio of tire–soil system using semi-empirical model. J. Terramech. 2014, 51, 67–80. [Google Scholar]
- Yiliyasi, Y. The Influence of Front Axle Suspension on Tractor Vibration Characteristics. Ph.D. Thesis, Nanjing Agricultural University, Nanjing, China, 2015. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Name | Items | Parameter Value |
|---|---|---|
| Yanmar VPG6G rice transplanter power chassis | Power Chassis Weight (ma, kg) | 720 |
| Operating speed (v, km·h−1) | 0~5.3 | |
| Rated engine power (P, kW) | 7.7 | |
| Wheelbases (L, mm) | 1050 | |
| Front wheelbase (lr, mm) | 1220 | |
| Rear wheelbase (lf, mm) | 1200 | |
| Pitch inertia (jb, kg·m2) | 936 | |
| Center-of-mass lateral distance (Ox, mm) | 15 | |
| Horizontal distance from the center of mass to the rear axis (lbr, mm) | 360 | |
| Horizontal distance from the center of mass to the front axis (lbf, mm) | 690 | |
| Soil damping factor (Cs, (N·s)−m) | 849 | |
| 2BDXZ-10CP (20) rice precision hole seeder | Seeder size (L × W × H, mm) | 1050 × 2080 × 500 |
| Seeder weight (mb, kg) | 185 | |
| Working width (mm) | 2000 | |
| Number of rows sown | 10 | |
| Row spacing (cm) | 20 | |
| Distance between holes (cm) | 10~20 adjustable | |
| Seeding rate (kg·hm−2) | 22.5~75 (3~10 grain/cavity adjustable) |
| Device Name | Items | Parameter Value |
|---|---|---|
| CT1010LC Piezoelectric Single-Axis Accelerometer | Range (g) | ±50 |
| Frequency response (Hz) | 0.5~12,000 | |
| Degree of sensitivity (mV·g−1) | 100 | |
| Lateral sensitivity (%) | <5 | |
| CT1010SLFP Piezoelectric Triaxial Acceleration Sensor | Range (g) | ±50 |
| Frequency response (Hz) | 0.5~8000 | |
| Degree of sensitivity (mV·g−1) | 100 | |
| Lateral sensitivity (%) | <5 | |
| USB-1608G Multi-function Data Acquisition Instrument | Channel number | 16 |
| Maximum sampling rate (kS·s−1) | 500 | |
| Distortion (%) | <0.5 |
| Field Type | Items | Parameter Value |
|---|---|---|
| Dry land | Soil moisture content of the subsoil (%) | 37.6 |
| Soil cohesion (kPa) | 2.83 | |
| Permissible soil weight (g·cm−3) | 1.81 | |
| Paddy field | Average soil moisture content (%) | 25.3 |
| Average soil firmness (kPa) | 737.2 | |
| Permissible soil weight (g·cm−3) | 1.22 |
| Test Number | Road Condition | Forward Distance (m) | Lifting Height of Mounted Implements (mm) | Forward Speed (m·s−1) |
|---|---|---|---|---|
| 1 | Concrete roads | 35 | 410 | 0 |
| 2 | 0.31 | |||
| 3 | 0.61 | |||
| 4 | 0.83 | |||
| 5 | 1.13 | |||
| 6 | 1.27 | |||
| 1 | Dry land | 35 | 410 | 0 |
| 2 | 0.31 | |||
| 3 | 0.61 | |||
| 4 | 0.83 | |||
| 5 | 1.13 | |||
| 6 | 1.27 | |||
| 1 | Paddy field | 35 | 410 | 0 |
| 2 | 0.31 | |||
| 3 | 0.61 | |||
| 4 | 0.83 | |||
| 5 | 1.13 | |||
| 6 | 1.27 |
| Front Axle | Rear Axle | Engines | Seat X-Direction | Seat Y-Direction | Seat Z-Direction | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Frequency (Hz) | Peak Value (m·s−2) | Frequency (Hz) | Peak Value (m·s−2) | Frequency (Hz) | Peak Value (m·s−2) | Frequency (Hz) | Peak Value (m·s−2) | Frequency (Hz) | Peak Value (m·s−2) | Frequency (Hz) | Peak Value (m·s−2) | ||
| Concrete roads | 0 m·s−1 | 13.45 | 0.78 | 13.35 | 1.33 | 262.8 | 0.99 | 13.57 | 2.79 | 13.57 | 2.92 | 13.7 | 1.68 |
| 0.31 m·s−1 | 14.51 | 0.31 | 7.25 | 0.14 | 130.5 | 0.51 | 3.09 | 0.21 | 3.02 | 0.29 | 4.72 | 0.28 | |
| 0.61 m·s−1 | 4.43 | 0.15 | 5.58 | 0.22 | 130.9 | 0.48 | 2.58 | 0.22 | 2.18 | 0.31 | 3.48 | 0.19 | |
| 0.83 m·s−1 | 6.53 | 0.11 | 6.51 | 0.17 | 129.7 | 0.79 | 3.38 | 0.21 | 3.21 | 0.16 | 4.37 | 0.17 | |
| 1.13 m·s−1 | 8.62 | 0.13 | 12.63 | 0.15 | 131.4 | 0.36 | 3.99 | 0.13 | 3.55 | 0.18 | 5.45 | 0.27 | |
| 1.27 m·s−1 | 11.56 | 0.23 | 11.56 | 0.48 | 134.2 | 0.36 | 4.89 | 0.28 | 4.23 | 0.21 | 5.98 | 0.29 | |
| Dry land | 0 m·s−1 | 13.27 | 1.13 | 13.27 | 1.41 | 267.3 | 0.35 | 13.21 | 1.13 | 13.9 | 0.87 | 13.21 | 0.85 |
| 0.31 m·s−1 | 15.2 | 0.09 | 6.4 | 0.13 | 236.8 | 0.21 | 3.67 | 0.23 | 3.56 | 0.35 | 4.67 | 0.14 | |
| 0.61 m·s−1 | 5.8 | 0.16 | 2.61 | 0.14 | 263.7 | 0.41 | 2.33 | 0.16 | 2.72 | 0.31 | 3.93 | 0.18 | |
| 0.83 m·s−1 | 7.48 | 0.16 | 3.28 | 0.09 | 255.1 | 1.35 | 3.72 | 0.26 | 3.53 | 0.36 | 4.57 | 0.35 | |
| 1.13 m·s−1 | 9.77 | 0.37 | 4.27 | 0.15 | 262.6 | 0.84 | 4.15 | 0.23 | 4.11 | 0.18 | 5.62 | 0.19 | |
| 1.27 m·s−1 | 12.4 | 0.63 | 5.58 | 0.17 | 265.8 | 1.09 | 4.94 | 0.21 | 4.87 | 0.26 | 6.38 | 0.18 | |
| Paddy field | 0 m·s−1 | 13.18 | 0.55 | 13.18 | 0.28 | 266.3 | 0.44 | 13.11 | 0.53 | 13.2 | 0.89 | 13.06 | 0.84 |
| 0.31 m·s−1 | 15.8 | 0.12 | 4.2 | 0.08 | 234.6 | 0.36 | 3.51 | 0.11 | 3.48 | 0.21 | 4.33 | 0.15 | |
| 0.61 m·s−1 | 5.6 | 0.22 | 2.33 | 0.16 | 259.4 | 0.59 | 2.46 | 0.14 | 2.59 | 0.28 | 3.74 | 0.24 | |
| 0.83 m·s−1 | 7.3 | 0.21 | 3.21 | 0.11 | 262.2 | 0.71 | 3.48 | 0.13 | 3.46 | 0.18 | 4.46 | 0.14 | |
| 1.13 m·s−1 | 8.5 | 0.18 | 4.13 | 0.14 | 264.4 | 0.63 | 4.12 | 0.21 | 4.07 | 0.21 | 5.58 | 0.19 | |
| 1.27 m·s−1 | 11.7 | 0.34 | 5.18 | 0.14 | 255.8 | 0.96 | 4.75 | 0.35 | 4.69 | 0.18 | 6.27 | 0.37 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, D.; He, J.; Peng, F.; Qian, C.; Zang, Y.; Zhang, M.; Yang, W.; Zeng, G.; Chen, J.; Qin, W.; et al. Study on Vibration Characteristics of Paddy Power Chassis under Different Driving Conditions. Agriculture 2023, 13, 1842. https://doi.org/10.3390/agriculture13091842
Yu D, He J, Peng F, Qian C, Zang Y, Zhang M, Yang W, Zeng G, Chen J, Qin W, et al. Study on Vibration Characteristics of Paddy Power Chassis under Different Driving Conditions. Agriculture. 2023; 13(9):1842. https://doi.org/10.3390/agriculture13091842
Chicago/Turabian StyleYu, Dongyang, Jianfei He, Feihu Peng, Cheng Qian, Ying Zang, Minghua Zhang, Wenwu Yang, Guoxiang Zeng, Jianpeng Chen, Wei Qin, and et al. 2023. "Study on Vibration Characteristics of Paddy Power Chassis under Different Driving Conditions" Agriculture 13, no. 9: 1842. https://doi.org/10.3390/agriculture13091842