
The FC Algorithm to Estimate the Manning’s Roughness Coefficients of Irrigation Canals
 , , and
, , and
Abstract
:1. Introduction

2. Materials and Methods
2.1. Control System Scheme
2.2. The HIM Matrix
- ve is the weighted average velocity of all the particles in a canal cross-section;
- ye is the water level of all the particles in a canal cross-section;
- S(ye) is the horizontal surface of the reception area in the checkpoint;
- A(ye)*ve is the incoming flow to checkpoint, defined in terms of water level and velocity;
- A(ys)*vs is the outflow from the checkpoint that continues along the canal, described in terms of water level and velocity;
- Cd is the discharge coefficient of the sluicegate and ac is the sluicegate width;
- d is the checkpoint drop, and u is the gate opening;
- qb is the pumping offtake;
- qs(ye) is the outgoing lateral flow through the weir where Cs is the discharge coefficient, as is the weir width, and y0 is the weir height measured from the bottom, called weir equation;
- Qofftake(ye) is the outflow orifice flow where C0 is the discharge coefficient, A0 is the area of the offtake orifice, called orifice offtake equation;
- u is the open gate height
2.3. The Optimization Problem
3. Practical Examples, Results, and Discussion
3.1. Practical Example: A Canal with Two Pools
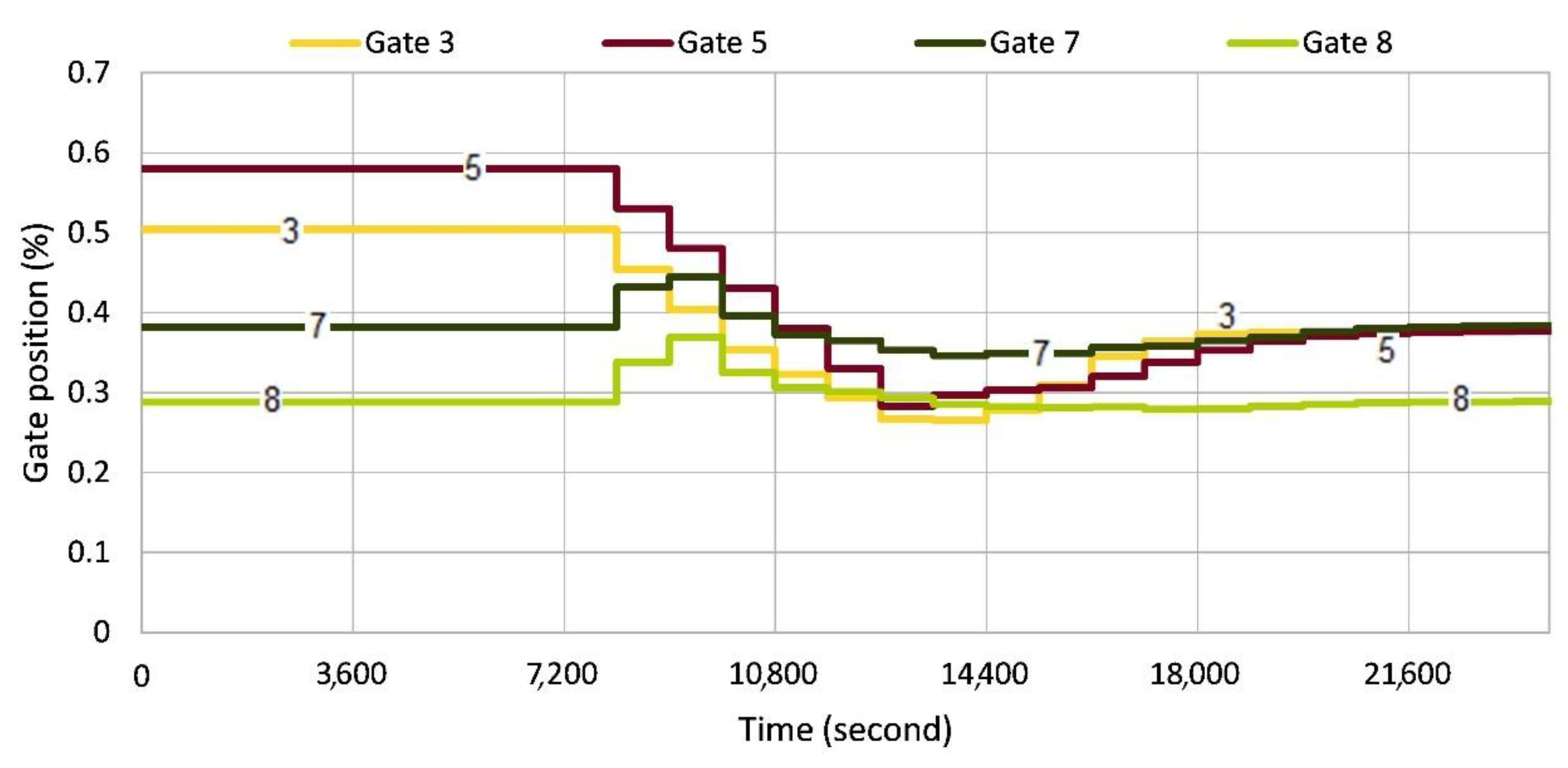
3.1.1. Scenario One: Changes in Gate Position
Results
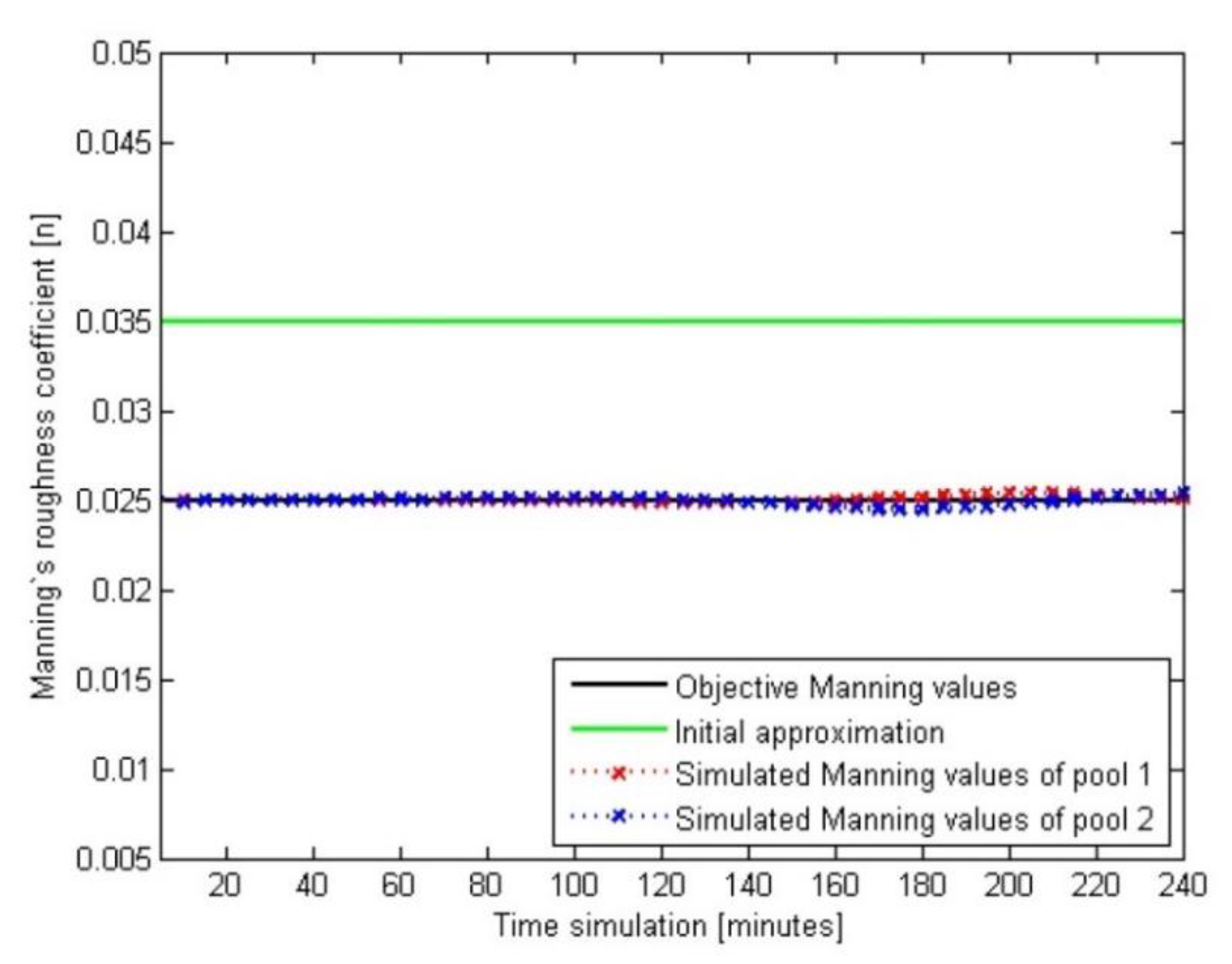
3.1.2. Scenario One: Results
3.1.3. Scenario Two: Changes in Water Demand
3.1.4. Scenario Two: Results
3.2. Practical Example: A Canal with Multiple Disturbances at the Same Time: ASCE TEST CASE
3.2.1. ASCE TEST CASE: Canal Features
3.2.2. ASCE TEST CASE: Initial and Boundary Conditions
3.2.3. ASCE TEST CASE: Scenario
3.2.4. ASCE TEST CASE: Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| A(y) | The area of the wet section which depends on the water level “y”; |
| c | The gate width; |
| b | Vector of dimension (2 × nS), obtained defining the HIM(Q); |
| bj | The j-gate width; |
| c(y) | Water wave celerity which is dependent on the water level “y”; |
| Cc | Contraction coefficient of the gate; |
| Cd | Discharge coefficient of the gate; |
| cT | Local losses coefficient in the canal; |
| Cw | Discharge coefficient of a weir; |
| dj | Drop at j-gate; |
| f(k) | Input function at time step k; |
| g | Gravity; |
| HIM(n) | Hydraulic influence matrix (derivative parameter n); |
| Hup | Constant upstream water level at upstream boundary condition (canal header); |
| I | Identity matrix; |
| J(n) | Performance criterion (Manning coefficient trajectory) (objective function); |
| J | Matrix obtained deriving the output water level vector by a variable; |
| kF | Number of sections in which the prediction horizon is divided depending on the CFL condition/time frequency of measuring data; |
| KF | Number of operation periods defined by the watermaster in which the simulating horizon is divided; |
| ko(k) | Orifice coefficient depending on its overture of the gravity i-offtake at time instant k; |
| M | Matrix obtained from the Saint-Venant equation to represent the influence between parameters at different sections (in a structured mesh); |
| N | Matrix obtained from the Saint-Venant equation to represent the influence between parameters at points P and Q; |
| n | Manning coefficient; |
| nc | Number of checkpoints; |
| np | Number of pools; |
| ns | Number of sections in which the canal is discretized; |
| nx | Dimension of prediction vector (nX = (2 × nS) × kF); |
| ny | Dimension of prediction output vector (nY = kF × nC); |
| P(y) | The wet perimeter which is function of the water level “y”; |
| Q | Weighting matrix; |
| qofftake | Discharge through the orifice offtake; |
| qs | Discharge through the lateral spillway; |
| RH | The hydraulic radius is a measure of a channel flow efficiency; |
| Residual vector between the desired water level and the computed water level; | |
| S | Matrix obtained from the Saint-Venant equation to represent the influence between parameters; |
| S(y) | Horizontal surface of the reception area in the checkpoint; |
| S0 | Bottom slope; |
| Sf | Friction slope; |
| TK | Operation instant when the Manning coefficient could be changed; |
| T(y) | The maximum width dependent on the water level “y”; |
| nij(K) | Manning coefficient of the pool i during the operation period K at the prediction horizon j; |
| n | Manning roughness coefficient value; |
| n0 | Vector with the Manning coefficient at the first regulation period for the previous predictive horizon; |
| u | The open gate height |
| vi(k) | Mean velocity at time instant k at canal section i; |
| x(k) | State vector at time instant k; |
| y(k) | Subset of water depths of the state vector at time instant k at checkpoints; |
| Predictive output vector from 1 to kF; | |
| Y* (k) | Subset of measurement water levels at checkpoints at time instant k; |
| ydw | Downstream j-gate water depth; |
| yi(k) | Water depth at time instant k at canal section i; |
| yo | Height of the center of the orifice from bottom of the gravity offtake; |
| ys | Downstream water level of the reservoir; |
| yup | Upstream j-gate water depth; |
| z | Variable used to interpolate values with the Lagrange factors; |
| Δn | Perturbed input/output Manning vector; |
| Δt | Numerical discretization time according to CFL condition; |
| ΔT | Operation period defined by the watermaster; |
| ΔY | Water level perturbation; |
| Δx | Numerical discretization space cell length; |
| ΔX | Perturbed state vector obtained when a perturbation is introduced into the system; |
| Norm vector error between the computed and desired Manning coefficient; |
References
- United Nations. World Population Prospects: The 2015 Revision, Key Findings and Advance Tables; Technical Report; United Nations: Geneva, Switzerland, 2015. [Google Scholar]
- Alexandratos, N.; Bruinsma, J. World Agriculture towards 2015/2030: The 2012 Revision; ESA Working Paper; Food and Agricultural Organization of the United Nations: Rome, Italy, 2012; Volume 12, No. 3. [Google Scholar]
- Food and Agriculture Organization of the United Nations. AQUASTAT Database. Total Water Withdrawal by Sector; Food and Agricultural Organization of the United Nations: Rome, Italy, 2016. [Google Scholar]
- United States Geological Survey. Where Is Earth’s Water? 2016. Available online: https://www.usgs.gov/media/images/distribution-water-and-above-earth-0 (accessed on 13 May 2020).
- Phocaides, A. Handbook on Pressurised Irrigation Techniques; Food and Agriculture Organization of the United Nations: Rome, Italy, 2007. [Google Scholar]
- Koech, R.; Langat, P. Improving irrigation water use efficiency: A review of advances, challenges and opportunities in the Australian context. Water 2018, 10, 1771. [Google Scholar] [CrossRef] [Green Version]
- Ankum, P. Operation methods in canal irrigation delivery systems. In Irrigation Scheduling: From Theory to Practice, Proceedings of the ICID/FAO Workshop on Irrigation Scheduling, Rome, Italy, 12–13 September 1995; FAO Water Reports 8; FAO–ICID: New Delhi, India, 1996. [Google Scholar]
- Rogers, D.C.; Goussard, J. Canal control algorithms currently in use. J. Irrig. Drain. Eng. 1998, 124, 11–15. [Google Scholar] [CrossRef]
- Bonet, E.; Gómez, M.; Soler, J.; Yubero, M.T. CSE algorithm: “Canal Survey Estimation” to evaluate the flow rate extractions and hydraulic state in irrigation canals. J. Hydroinform. 2016, 19, 62–80. [Google Scholar] [CrossRef] [Green Version]
- Shan-e-hyder, S.; Caihong, H.; Muhammad, M.B.; Mairaj, H. Estimation of Manning’s Roughness Coefficient Through Calibration Using HEC-RAS Model: A Case Study of Rohri Canal, Pakistan. Am. J. Civ. Eng. 2021, 9, 1. [Google Scholar] [CrossRef]
- Yujian, L.; Yixin, G.; Liang, M. Calibration method for Manning’s roughness coefficient for a river flume model. Water Supply 2020, 20, 3597–3603. [Google Scholar] [CrossRef]
- Yao, L.; Peng, Y.; Yu, X.; Zhang, Z.; Luo, S. Optimal Inversion of Manning’s Roughness in Unsteady Open Flow Simulations Using Adaptive Parallel Genetic Algorithm. Water Resour. Manag. 2023, 37, 879–897. [Google Scholar] [CrossRef]
- Soler, J.; Gómez, M.; Rodellar, J.; Gamazo, P. Application of the GoRoSo Feedforward Algorithm to Compute the Gate Trajectories for a Quick Canal Closing in the Case of an Emergency. J. Irrig. Drain. Eng. 2013, 139, 1028–1036. [Google Scholar] [CrossRef]
- Wahlin, B.T.; Clemmens Albert, J. Automatic Downstream Water-Level Feedback Control of Branching Canal Networks: Simulation Results. J. Irrig. Drain. Eng. 2006, 132, 208–219. [Google Scholar] [CrossRef] [Green Version]
- Bonet, E.; Gómez, M.; Yubero, M.T.; Fernández-Francos, J. GOROSOBO: An overall control diagram to improve the efficiency of water transport systems in real time. J. Hydroinform. 2017, 19, 364–384. [Google Scholar] [CrossRef] [Green Version]
- Aguilar, J.V.; Langarita, P.; Rodellar, J.; Linares, L.; Horváth, K. Predictive control of irrigation canals—Robust design and real-time implementation. Water Resour. Manag. 2016, 11, 3829–3843. [Google Scholar] [CrossRef] [Green Version]
- Clemmens, A.J.; Kacerek, T.F.; Grawitz, B.; Schuurmans, W. Test cases for canal control algorithms. J. Irrig. Drain. Eng. 1998, 124, 23–30. [Google Scholar] [CrossRef]
- González, R. Friction Coeficient Algorithm: Algoritmo Para la Estimación de Los Coeficientes de Manning en Canales de Regadío. TFM, UPC, Escola Tècnica Superior d’Enginyers de Camins, Canals i Ports de Barcelona. 2020. Available online: http://hdl.handle.net/2117/334176 (accessed on 30 June 2020).
- Bonet Gil, E. Experimental Design and Verification of a Centralized Controller for Irrigation Canals. Tesi Doctoral, UPC, Escola Tècnica Superior d’Enginyers de Camins, Canals i Ports de Barcelona, Barcelonam, Spain. 2015. Available online: http://hdl.handle.net/2117/95654 (accessed on 26 March 2015).
- Barnes, H.H. Roughness Characteristics of Natural Channels; Technical Report; U.S Geological Survey Water-Supply Paper No. 1849; US Government Printing Office: Washington, DC, USA, 1967. [Google Scholar]
- Coon, W.F. Estimation of Roughness Coefficients for Natural Stream Channels with Vegetated Banks; Technical Report; U.S Geological Survey Water-Supply Paper No. 2441; US Geological Survey: Reston, VA, USA, 1998. [Google Scholar]
- Gómez, M. Contribución al Estudio del Movimiento Variable en Lámina Libre en Las Redes de Alcantarillado. Aplicaciones. Ph.D. Thesis, Escola Tècnica Superior d’Enginyers de Camins, Canals i Ports de Barcelona, Barcelona, Spain, 1988. [Google Scholar]
- Fletcher, R. Practical Methods of Optimization, 2nd ed.; John Viley & Sons: Chichester, UK, 1987. [Google Scholar]
- Gill, P.E.; Murray, W.; Wright, M.H. Practical Optimization; Academic Press Inc.: Edinburgh, UK, 1981. [Google Scholar]
- Akkuzu, E.; Unal, H.; Karatas, B.; Avci, M.; Asik, S. Evaluation of irrigation canal maintenance according to roughness and active canal capacity values. J. Irrig. Drain. Eng. 2008, 134, 60–66. [Google Scholar] [CrossRef]
- Mohammed, M.; Tefera, A. Effect of reference conveyance parameter usage on real time canal performance: The case of Fentale irrigation scheme in Ethiopia. Comput. Water Energy Environ. Eng. 2017, 6, 79–88. [Google Scholar] [CrossRef] [Green Version]
- Bonet, E.; Gómez, M.; Yubero, M.T.; Fernández-Francos, J. GoRoSoBo simplified: An accurate feedback control algorithm in real time for irrigation canals. J. Hydroinform. 2019, 21, 945–961. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pool Number | Pool Length (km) | Bottom Slope (%) | Side Slopes (H:V) | Manning’s Coefficient (n) | Bottom Width (m) | Canal Depth (m) |
|---|---|---|---|---|---|---|
| I | 2.5 | 0.1 | 1.5:1 | 0.025 | 1 | 2.5 |
| II | 2.5 | 0.1 | 1.5:1 | 0.025 | 1 | 2.5 |
| Number of Control Structure or Checkpoint | Gate Discharge Coefficient | Gate Width (m) | Gate Height (m) | Step (m) | Discharge Coef./Diameter Orifice Offtake (m) | Orifice Offtake Height (m) | Lateral Spillway Height (m) | Lateral Spillway Width (m)/Discharge Coefficient |
|---|---|---|---|---|---|---|---|---|
| 0 | 0.61 | 5.0 | 2.5 | 0.6 | - | - | - | - |
| 1 | 0.61 | 5.0 | 2.5 | 0.6 | 0.6/0.77 | 1.0 | 2.3 | 500/1.99 |
| 2 | - | - | - | - | 0.6/0.77 | 1.0 | 2.3 | 500/1.99 |
| Pool Number | Pool Length (Km) | Bottom Slope | Side Slopes (H:V) | Manning’s Coefficient (n) | Bottom Width (m) | Canal Depth (m) |
|---|---|---|---|---|---|---|
| I | 7 | 10 × 10−4 | 1.5:1 | 0.02 | 7 | 2.5 |
| II | 3 | 10 × 10−4 | 1.5:1 | 0.02 | 7 | 2.5 |
| III | 3 | 10 × 10−4 | 1.5:1 | 0.02 | 7 | 2.5 |
| IV | 4 | 10 × 10−4 | 1.5:1 | 0.02 | 6 | 2.3 |
| V | 4 | 10 × 10−4 | 1.5:1 | 0.02 | 6 | 2.3 |
| VI | 3 | 10 × 10−4 | 1.5:1 | 0.02 | 5 | 2.3 |
| VII | 2 | 10 × 10−4 | 1.5:1 | 0.02 | 5 | 1.9 |
| VIII | 2 | 10 × 10−4 | 1.5:1 | 0.02 | 5 | 1.9 |
| Target Points | Gate Discharge Coefficient | Gate Width (m) | Gate Height (m) | Step (m) | Length from Gate 1 (km) | Orifice Offtake Height (m) | Lateral Spillway Height (m) |
|---|---|---|---|---|---|---|---|
| 0 | 0.61 | 7 | 2.3 | 0.2 | 0 | - | 3 |
| 1 | 0.61 | 7 | 2.3 | 0.2 | 7 | 1.05 | 2.5 |
| 2 | 0.61 | 7 | 2.3 | 0.2 | 10 | 1.05 | 2.5 |
| 3 | 0.61 | 7 | 2.3 | 0.2 | 13 | 1.05 | 2.5 |
| 4 | 0.61 | 6 | 2.1 | 0.2 | 17 | 0.95 | 2.3 |
| 5 | 0.61 | 6 | 2.1 | 0.2 | 21 | 0.95 | 2.3 |
| 6 | 0.61 | 5 | 1.8 | 0.2 | 24 | 0.85 | 1.9 |
| 7 | 0.61 | 5 | 1.8 | 0.2 | 26 | 0.85 | 1.9 |
| 8 | - | - | - | - | 28 | 0.85 | 1.9 |
| Pool Number | Offtake Initial Flow (m3/s) | Check Initial Flow (m3/s) | Unscheduled Offtake Changes at 2 h (m3/s) | Check Final Flow (m3/s) |
|---|---|---|---|---|
| Heading | - | 13.5 | - | 11.5 |
| I | 1.0 | 12.5 | - | 10.5 |
| II | 1.0 | 11.5 | - | 9.5 |
| III | 1.0 | 10.5 | - | 8.5 |
| IV | 1.0 | 9.5 | - | 7.5 |
| V | 2.5 | 7.0 | - | 5.0 |
| VI | 2.0 | 5.0 | −2.0 | 5.0 |
| VII | 1.0 | 4.0 | - | 4.0 |
| VIII | 1.0 | 3.0 | - | 3.0 |
| Checkpoint | Target Water Level (m) |
|---|---|
| Heading | - |
| I | 2.1 |
| II | 2.1 |
| III | 2.1 |
| IV | 1.9 |
| V | 1.9 |
| VI | 1.7 |
| VII | 1.7 |
| VIII | 1.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bonet, E.; Russo, B.; González, R.; Yubero, M.T.; Gómez, M.; Sánchez-Juny, M. The FC Algorithm to Estimate the Manning’s Roughness Coefficients of Irrigation Canals. Agriculture 2023, 13, 1351. https://doi.org/10.3390/agriculture13071351
Bonet E, Russo B, González R, Yubero MT, Gómez M, Sánchez-Juny M. The FC Algorithm to Estimate the Manning’s Roughness Coefficients of Irrigation Canals. Agriculture. 2023; 13(7):1351. https://doi.org/10.3390/agriculture13071351
Chicago/Turabian StyleBonet, Enrique, Beniamino Russo, Ricard González, Maria Teresa Yubero, Manuel Gómez, and Martí Sánchez-Juny. 2023. "The FC Algorithm to Estimate the Manning’s Roughness Coefficients of Irrigation Canals" Agriculture 13, no. 7: 1351. https://doi.org/10.3390/agriculture13071351