
Design of High-Efficiency Soil-Returning Liquid Fertilizer Deep-Application Furrow Openers for Improving Furrowing Performance in Cold Regions of Northeast China


 and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. DEM Virtual Simulation Test
2.1.1. Measurement of Physical Parameters of Black Soil
2.1.2. Measurement of Black Soil Contact Parameters
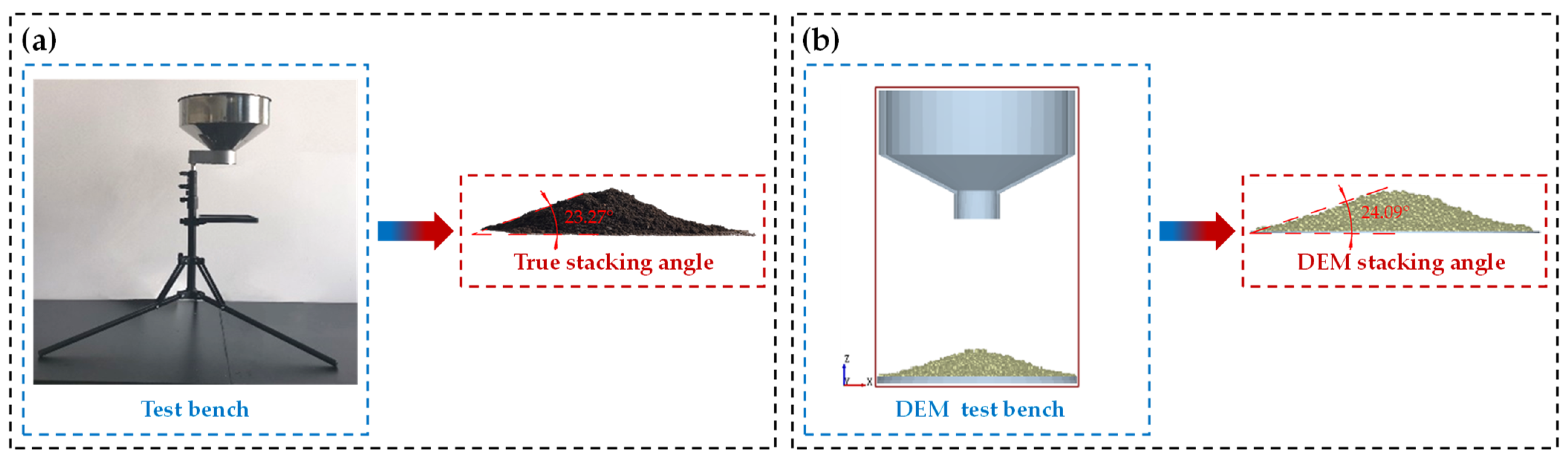
2.1.3. Setting and Calibration of DEM Virtual Simulation Parameters
2.1.4. DEM Virtual Simulation Soil Bin Construction
2.1.5. DEM Virtual Simulation Model Construction
- Soil disturbance rate ρ
- Soil-return depth h
2.2. Soil Bin Verification and Performance Test
3. Results
3.1. Soil Bin Verification Test Results
3.2. Soil Bin Verification Test Results
4. Discussion
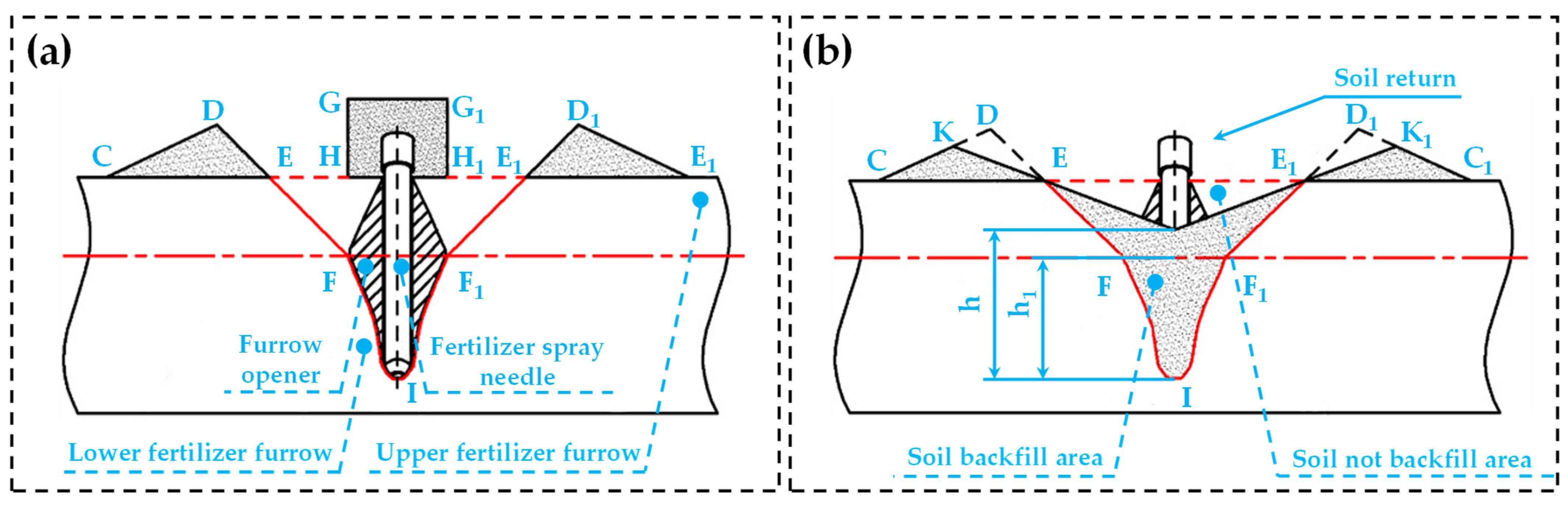
4.1. Analysis of Soil-Returning Behavior of High-Efficiency Soil-Returning Liquid Fertilizer Deep Application Furrow Opener
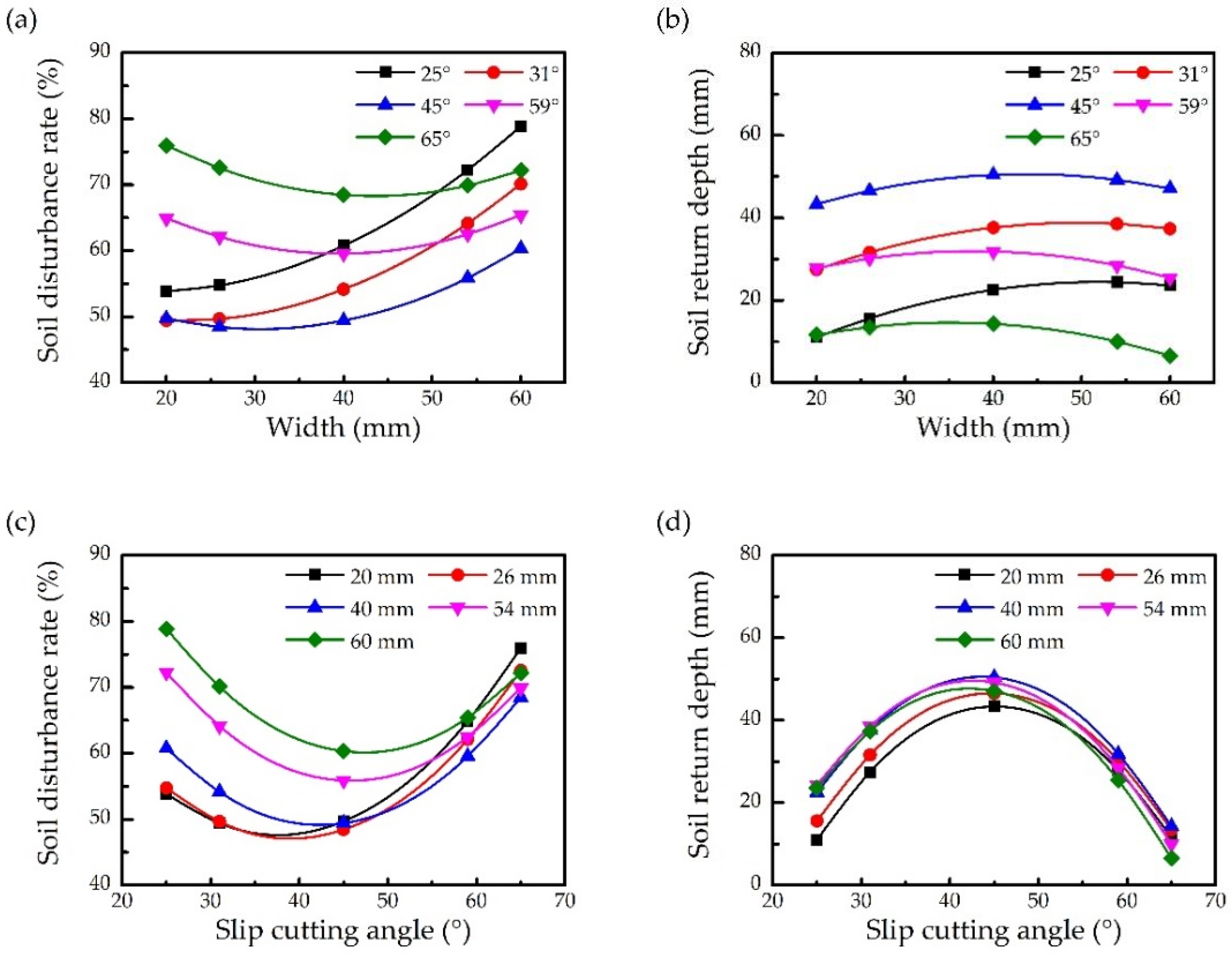
4.2. Disturbed Surface Analysis
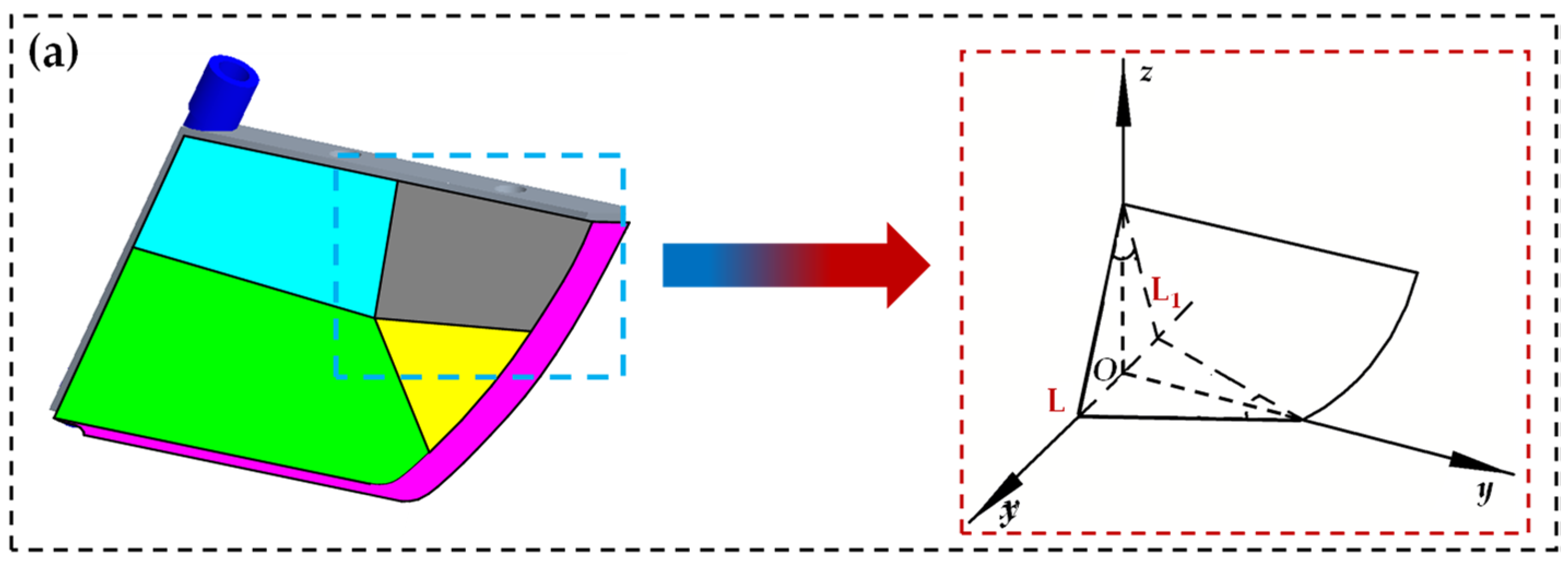
4.3. Guide Inclined Surface Analysis
4.4. Analysis of Extruded Soil Surface
4.5. Analysis of Shaping Surface
4.6. Analysis of Sliding–Cutting Edge
4.7. Analysis of Furrow Contour Parameter Results in Soil Bin Verification Test
4.8. Analysis of High-Speed Camera Results of Soil Bin Verification Test
4.9. Analysis of Soil Bin Performance Test Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| L | The opener width (mm) |
| θ | The slip cutting angle (°) |
| θ1 | The initial slip cutting angle (°) |
| θ2 | The larger the terminational slip cutting angle θ2 (°) |
| φ | The soil friction angle (°) |
| ρ | The soil disturbance rate (%) |
| h | The higher the soil-return depth (mm) |
References
- Sun, B.; Jia, S.; Zhang, S.; McLaughlin, N.B.; Zhang, X.; Liang, A.; Chen, X.; Wei, S.; Liu, S. Tillage, seasonal and depths effects on soil microbial properties in black soil of Northeast China. Soil Tillage Res. 2016, 155, 421–428. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, X.; Jia, S.; Liang, A.; Zhang, X.; Yang, X.; Wei, S.; Sun, B.; Huang, D.; Zhou, G. The potential mechanism of long-term conservation tillage effects on maize yield in the black soil of Northeast China. Soil Tillage Res. 2015, 154, 84–90. [Google Scholar] [CrossRef]
- Qu, Y.; Pan, C.; Guo, H. Factors Affecting the Promotion of Conservation Tillage in Black Soil—The Case of Northeast China. Sustainability 2021, 13, 9563. [Google Scholar] [CrossRef]
- Liu, Q.; Wu, K.; Song, W.; Zhong, N.; Wu, Y.; Fu, X. Improving crop nitrogen use efficiency toward sustainable green revolution. Annu. Rev. Plant Biol. 2022, 73, 523–551. [Google Scholar] [CrossRef] [PubMed]
- Pimentel, D. Green revolution agriculture and chemical hazards. Sci. Total Environ. 1996, 188, S86–S98. [Google Scholar] [CrossRef]
- Han, T.; Jinwu, W.; Changsu, X.U.; Wenqi, Z.; Jinfeng, W.; Xiu, W. Research progress analysis on key technology of chemical fertilizer reduction and efficiency increase. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2019, 50, 1–19. [Google Scholar]
- Shi, C.L.; Li, Y.; Zhu, J.F. Rural labor transfer, excessive fertilizer use and agricultural non-point source pollution. J. China Agric. Univ. 2016, 21, 169–180. [Google Scholar]
- Zhu, L.Z.; Qiu, J.; Fang, X. Soil conservation measures and enlightenment in foreign countries. Soil Fertil. Ences China 2015, 2, 1–4. [Google Scholar]
- Chen, Y.; Zhang, Q.; Petkau, D.S. Evaluation of different techniques for liquid manure application on grassland. Appl. Eng. Agric. 2001, 17, 489. [Google Scholar] [CrossRef]
- Swanepoel, P.A.; Labuschagne, J. Canola is injured by in-row nitrogen placement associated with disc openers, but not by tine openers. Crop Sci. 2020, 60, 466–474. [Google Scholar] [CrossRef]
- Xie, J.S.; Yang, Y.S.; Chen, G.S.; Zhu, J.M.; Zeng, H.D.; Yang, Z.J. Effects of vegetation restoration on water stability and organic carbon distribution in aggregates of degraded red soil in subtropics of China. Acta Ecol. Sin. 2008, 28, 702–709. [Google Scholar]
- Zhang, L.; He, Y.; Yang, H.; Tang, Z.; Zheng, X.; Meng, X. Analysis of the relationship between the development of liquid fertilizer machinery and modern agriculture. J. Chin. Agric. Mech. 2021, 42, 34–40. [Google Scholar]
- Wenqi, Z.; Hong, X.; Ziming, L.I.U.; Jinwu, W.; Huinan, H.; Aoxue, W. Design and Test of SYJ-3 Deep Application-type Inclined Liquid Fertilizer Hole Applicator. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2020, 51, 78–86. [Google Scholar]
- Wang, J.; Wen, N.; Liu, Z.; Zhou, W.; Tang, H.; Wang, Q.; Wang, J. Coupled Bionic Design of Liquid Fertilizer Deep Application Type Opener Based on Sturgeon Streamline to Enhance Opening Performance in Cold Soils of Northeast China. Agriculture 2022, 12, 615. [Google Scholar] [CrossRef]
- Wang, J.; Pan, Z.; Zhou, W.; Wang, J.; He, J.; Lang, C. Design and test of SYJ-2 type liquid variable fertilizer. Trans. Chin. Soc. Agric. Mach. 2015, 46, 53–58. [Google Scholar]
- Godwin, R.J.; Spoor, G. Soil failure with narrow tines. J. Agric. Eng. Res. 1977, 22, 213–228. [Google Scholar] [CrossRef]
- Godwin, R.J. A review of the effect of implement geometry on soil failure and implement forces. Soil Tillage Res. 2007, 97, 331–340. [Google Scholar] [CrossRef]
- Solhjou, A.; Desbiolles, J.M.; Fielke, J.M. Soil translocation by narrow openers with various blade face geometries. Biosyst. Eng. 2013, 114, 259–266. [Google Scholar] [CrossRef]
- Rodhe, L.; Etana, A. Performance of slurry injectors compared with band spreading on three Swedish soils with ley. Biosyst. Eng. 2005, 92, 107–118. [Google Scholar] [CrossRef]
- Shuhong, Z.; Hongjun, L.; Hewen, T. Design and performance experiment of opener based on bionic sailfish head curve. Trans. Chin. Soc. Agric. Eng. 2017, 33, 32–39. [Google Scholar]
- Beyaz, A.; Gerdan, D. Computer-aided Stress Analysis of a Model of Tractor Mounted Auger Drill. Agric. Sci. Dig.-A Res. J. 2019, 39, 90–95. [Google Scholar] [CrossRef] [Green Version]
- Bravo, E.L.; Tijskens, E.; Suárez, M.H.; Cueto, O.G.; Ramon, H. Prediction model for non-inversion soil tillage implemented on discrete element method. Comput. Electron. Agric. 2014, 106, 120–127. [Google Scholar] [CrossRef]
- Mak, J.; Chen, Y.; Sadek, M.A. Determining parameters of a discrete element model for soil–tool interaction. Soil Tillage Res. 2012, 118, 117–122. [Google Scholar] [CrossRef]
- Topp, G.C.; Parkin, G.W.; Ferré, T.P.A.; Carter, M.R.; Gregorich, E.G. Soil water content. In Soil Sampling and Methods of Analysis; Canadian Society of Soil Science: Pinawa, MB, Canada, 2008; pp. 939–962. [Google Scholar]
- Li, J.; Tong, J.; Hu, B.; Wang, H.B.; Mao, C.Y.; Ma, Y. Calibration of parameters of interaction between clayey black soil with different moisture content and soil-engaging component in northeast China. Trans. CSAE 2019, 35, 130–140. [Google Scholar]
- Tian, X.; Cong, X.; Qi, J.; Guo, H.; Li, M.; Fan, X. Parameter Calibration of Discrete Element Model for Corn Straw-Soil Mixture in Black Soil Areas. Trans. Chin. Soc. Agric. Mach. 2021, 52, 100–108+242. [Google Scholar]
- Zhao, J.; Wang, X.; Zhuang, J.; Liu, H.; Wang, Y.; Yu, Y. Coupled Bionic Design Based on Primnoa Mouthpart to Improve the Performance of a Straw Returning Machine. Agriculture 2021, 11, 775. [Google Scholar] [CrossRef]
- Liu, H.; Han, J.; Chen, J.; Lv, J.; Zhao, S. Performance simulation and experiment on rigid press wheel for hilly area. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2018, 49, 114–122. [Google Scholar]
- Shuhong, Z.; Hewen, T.; Jiayi, W. Design and experiment of multifunctional integrated seeding opener. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2018, 34, 58–67. [Google Scholar]
- Xiaodong, Y. The Theory Analysis of Furrower Soil Backfilling. Agric. Sci. Technol. Equip. 2014, 11, 37–39. [Google Scholar] [CrossRef]
- Jun, S. Simulation Study and Analysis of Materials Conveying Process by the Belt Conveyer Based on EDEM. Mech. Res. Appl. 2019, 32, 59–61. [Google Scholar] [CrossRef]
- Jia, H.; Zheng, J.; Yuan, H.; Guo, M.; Wang, W.; Jiang, X. Design and experiment of profiling sliding-knife opener. Trans. Chin. Soc. Agric. Eng. 2017, 33, 16–24. [Google Scholar]
- Barr, J.B.; Ucgul, M.; Desbiolles, J.M.A.; Fielke, J.M. Simulating the effect of rake angle on narrow opener performance with the discrete element method. Biosyst. Eng. 2018, 171, 1–15. [Google Scholar] [CrossRef]
- Jian, Z.; Honglei, J.; Yunhai, M. Design and experiment of sliding-knife-type disc opener. Trans. Chin. Soc. Agric. Mach. 2013, 44, 83–88. [Google Scholar]
- Zhao, S.; Liu, H.; Zhang, X.; Yang, Y.; Lü, B.; Tan, H. Design and optimization experiment of working performance of sliding push opener. Trans. Chin. Soc. Agric. Eng. 2016, 32, 26–34. [Google Scholar]
- Aikins, K.A.; Ucgul, M.; Barr, J.B.; Jensen, T.A.; Antille, D.L.; Desbiolles, J.M.A. Determination of discrete element model parameters for a cohesive soil and validation through narrow point opener performance analysis. Soil Tillage Res. 2021, 213, 105123. [Google Scholar] [CrossRef]
- Wang, Y.; Xue, W.; Ma, Y.; Tong, J.; Liu, X.; Sun, J. DEM and soil bin study on a biomimetic disc furrow opener. Comput. Electron. Agric. 2019, 156, 209–216. [Google Scholar] [CrossRef]
- Bai, H.; Li, S.; Wang, D.; Fang, X.; Niu, K.; Zhou, L.; Xiong, S.; Fan, C. Design and EDEM simulation of fertilizer stratification and deep application device. In Proceedings of the ASABE Annual International Meeting, American Society of Agricultural and Biological Engineers, Boston, MA USA, 7–10 July 2019; p. 1. [Google Scholar]
- Barr, J.; Desbiolles, J.; Ucgul, M.; Fielke, J.M. Bentleg furrow opener performance analysis using the discrete element method. Biosyst. Eng. 2020, 189, 99–115. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Soil particle size (mm) | 2~3 |
| Soil density (g·cm−3) | 1.516 |
| Soil Poisson’s ratio | 0.39 |
| Soil shear modulus (MPa) | 1.00 |
| Coefficient of static friction between soil particles | 0.53 |
| Coefficient of dynamic friction between soil particles | 0.78 |
| Recovery coefficient between soil particles | 0.23 |
| surface energy density (J·m−2) | 5.50 |
| Soil−65 Mn static friction coefficient | 0.47 |
| Soil−65 Mn rolling friction coefficient | 0.11 |
| Soil−65 Mn collision recovery coefficient | 0.09 |
| Resources | Regression Model on Slip Cut Angle | Regression Model on Width | ||||||
|---|---|---|---|---|---|---|---|---|
| Sum of Squares | df | F-Value | p-Value | Sum of Squares | df | F-Value | p-Value | |
| Model | 259.19 | 5 | 33.50 | <0.0001 | 213.26 | 5 | 24.88 | <0.0001 |
| x1 | 126.53 | 1 | 81.77 | <0.0001 | 16.99 | 1 | 9.91 | 0.0104 |
| x2 | 25.30 | 1 | 16.35 | 0.0023 | 10.50 | 1 | 6.13 | 0.0328 |
| x1x2 | 12.96 | 1 | 8.38 | 0.0160 | 4.62 | 1 | 2.70 | 0.1316 |
| x12 | 64.52 | 1 | 41.70 | <0.0001 | 54.34 | 1 | 31.69 | 0.0002 |
| x22 | 29.88 | 1 | 19.31 | 0.0013 | 126.80 | 1 | 73.96 | <0.0001 |
| Residual | 15.47 | 10 | 17.15 | 10 | ||||
| Lack of fit | 11.30 | 3 | 6.31 | 0.0211 | 1.88 | 3 | 0.29 | 0.8337 |
| Pure error | 4.18 | 7 | 15.27 | 7 | ||||
| Cor total | 274.67 | 15 | 230.41 | 15 | ||||
| Test Form | No. | Soil Disturbance (%) | Soil-Return Depth (mm) |
|---|---|---|---|
| DEM virtual simulation test | 1 | 52.81 | 50.8 |
| Soil bin test results | 1 | 50.11 | 52.7 |
| 2 | 51.07 | 53.3 | |
| 3 | 49.92 | 52.2 | |
| Average value | 50.37 | 52.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, W.; Song, C.; Sun, X.; Liu, Z.; Ni, X.; Shen, K.; Wang, Y.J.; Tian, L. Design of High-Efficiency Soil-Returning Liquid Fertilizer Deep-Application Furrow Openers for Improving Furrowing Performance in Cold Regions of Northeast China. Agriculture 2022, 12, 1286. https://doi.org/10.3390/agriculture12091286
Zhou W, Song C, Sun X, Liu Z, Ni X, Shen K, Wang YJ, Tian L. Design of High-Efficiency Soil-Returning Liquid Fertilizer Deep-Application Furrow Openers for Improving Furrowing Performance in Cold Regions of Northeast China. Agriculture. 2022; 12(9):1286. https://doi.org/10.3390/agriculture12091286
Chicago/Turabian StyleZhou, Wenqi, Chao Song, Xiaobo Sun, Ziming Liu, Xue Ni, Kangjia Shen, Yi Jia Wang, and Liquan Tian. 2022. "Design of High-Efficiency Soil-Returning Liquid Fertilizer Deep-Application Furrow Openers for Improving Furrowing Performance in Cold Regions of Northeast China" Agriculture 12, no. 9: 1286. https://doi.org/10.3390/agriculture12091286