
Single-Neuron PID UAV Variable Fertilizer Application Control System Based on a Weighted Coefficient Learning Correction

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
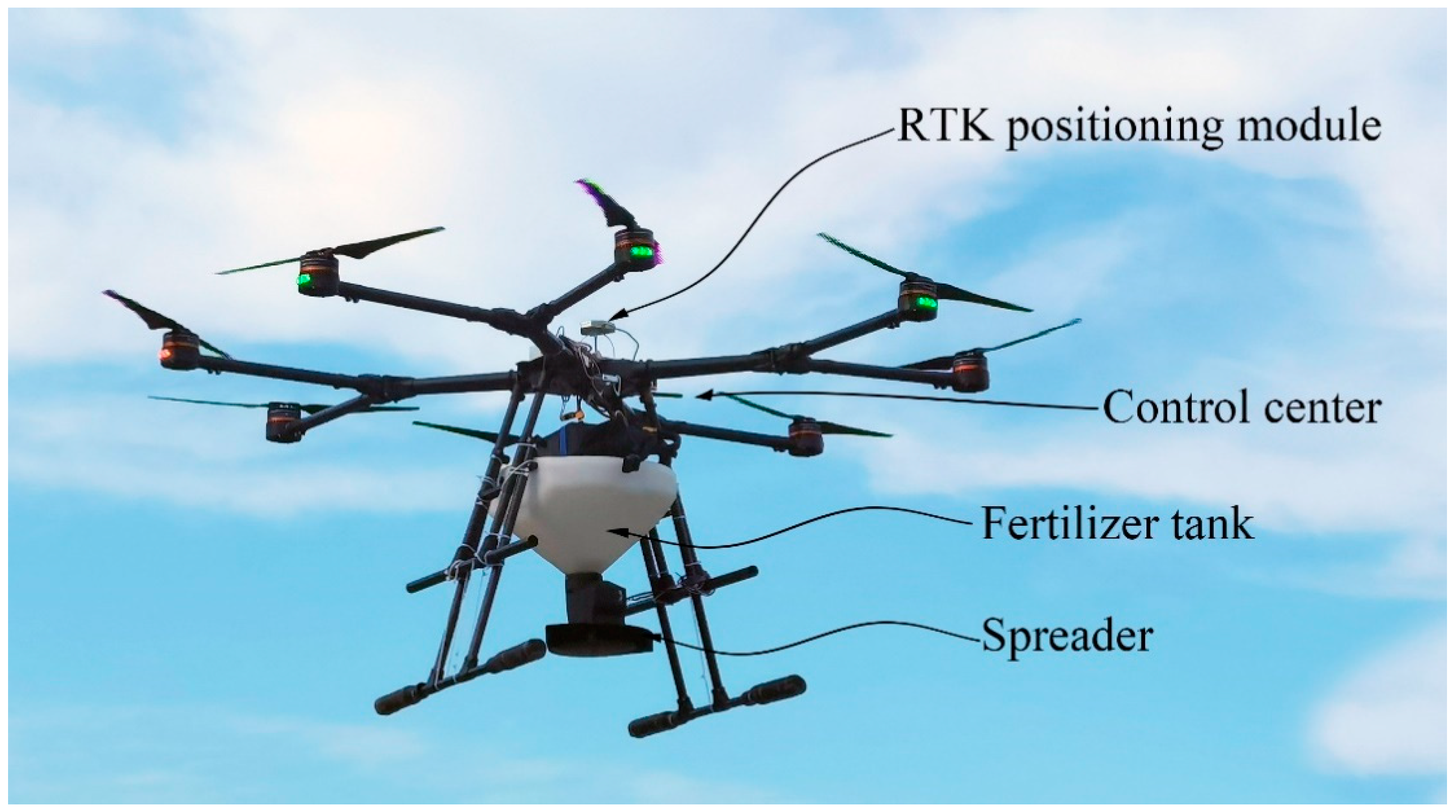
2.1. UAV Variable Fertilizer Application System
2.1.1. Control System Components
- (1)
- Central processing unit
- (2)
- Ground base station unit
- (3)
- Spreading volume control unit
2.1.2. Hardware Integration of the Variable Fertilizer Application System
2.2. Variable Fertilization Control System Algorithm Design
2.2.1. Working Principle of Variable Fertilization
2.2.2. Design of the Improved Single-Neuron PID Controller
2.2.3. Weighted Coefficient Learning-Modified Single-Neuron PID Control Strategy
2.3. Indoor Experimental Design
2.3.1. Comparison Simulation of the Control Algorithm and Dynamic Change following the Test of Spreading Volume
2.3.2. Testing the Effect of Different Speed Gradients and Baffle Gradients on the Dispersion Volume
2.4. Outdoor Performance Test Design
2.4.1. Test Conditions
2.4.2. Test Method
2.4.3. Evaluation Indices
2.5. Data Processing
3. Results and Discussion
3.1. Indoor Evaluation of Simulation Effect of Control Algorithm and Comparison of Dynamic Characteristics
3.2. Analysis of Indoor Test Results of Variable-Rate Control System
3.3. Performance Analysis of Outdoor Application of Variable-Rate Control System
4. Conclusions
- (1)
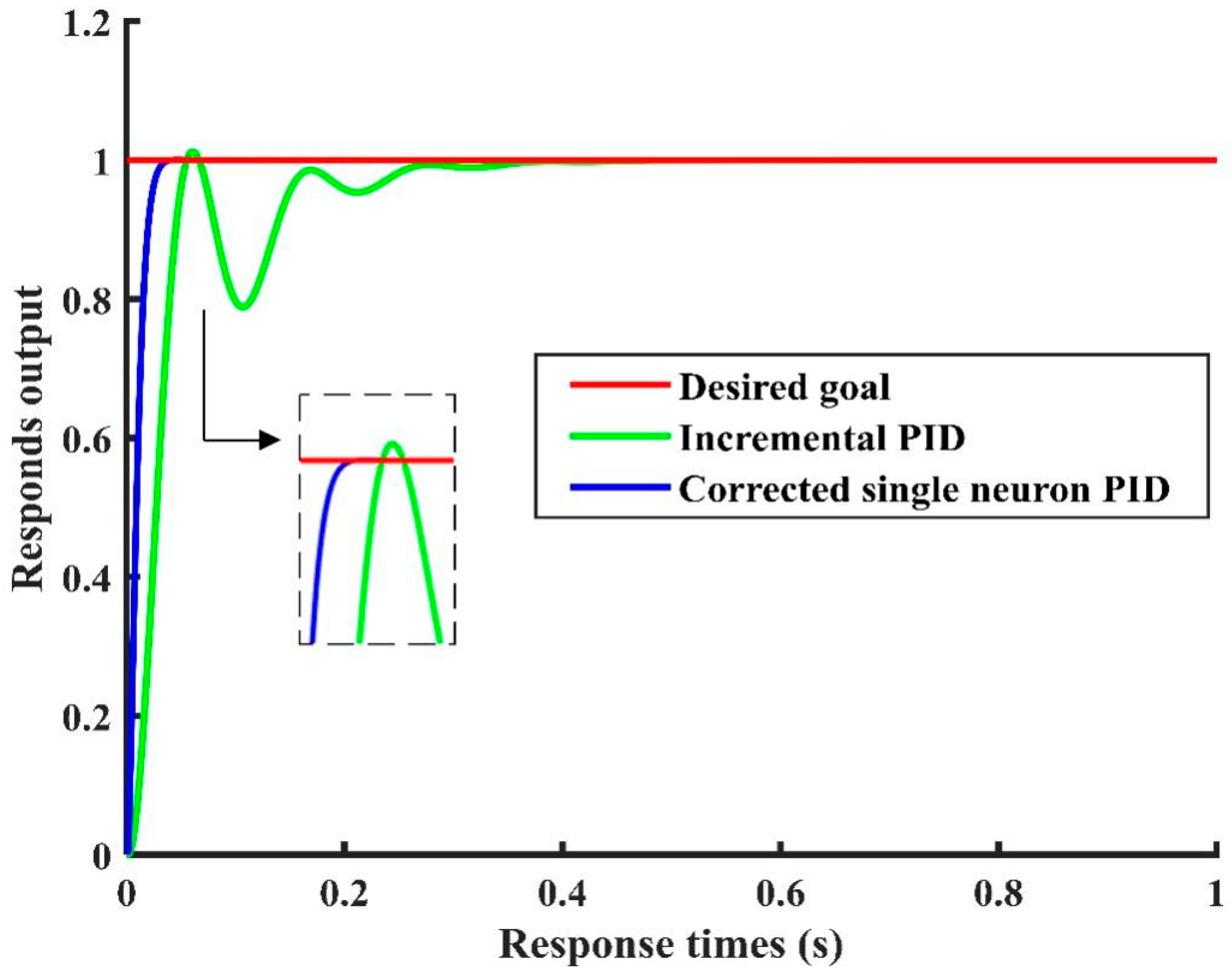
- The simulations and comparison tests of the INPID and SNPID control methods were conducted by MATLAB engineering software. The results of the single-variable tests showed that the response speed of the DC motor was the fastest and showed little increase with time when using the SNPID control method; this was better than the performance of the INPID control method.
- (2)
- The results of the indoor continuous variable process experiment showed that the SNPID adaptive control algorithm underwent little change during a short time compared with the fluctuation amplitude of the set value. The average rise time of the system was 0.88 s, and the system had good dynamic stability and tracking performance.
- (3)
- The outdoor spreading performance test results showed that the three parameters of the fertilizer-spreader operation were significantly different, with different evaluation indices. When the coefficient of the variation of particle distribution Cv was the evaluation index of the target operation width (15 m), the main and secondary factors were A (baffle opening), B (spreading disc speed), and C (flight height), and the best combination of factor levels was A2B2C1. When the relative error of fertilizer application λ was the evaluation index, the main and secondary factors were B (spreading disc speed), A (baffle opening), and C (flight height), and the best combination of factor levels was A1B2C1. The overall best combination of factor levels was A1B2C2, and the value of q was 4%, n was 600 r/min, h was 2 m, the Cv was 11.98%, and λ was 7.02%. The spreading system showed the best performance of spreading fertilizer, and the spreading volume control error was 7.30%. The monitoring error of the speed measurement module was less than 30 r/min, which effectively accomplished accurate variable fertilizer application. This demonstrated that the designed centrifugal variable fertilizer application system improved the uniformity and accuracy of the fertilizer application, which provided technical support for traditional fertilizer application.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Balafoutis, A.; Beck, B.; Fountas, S.; Vangeyte, J.; Wal, T.; Soto, I.; Gómez-Barbero, M.; Barnes, A.; Eory, V. Precision Agriculture Technologies Positively Contributing to GHG Emissions Mitigation, Farm Productivity and Economics. Sustainability 2017, 9, 1339. [Google Scholar] [CrossRef] [Green Version]
- Yinyan, S.; Zhichao, H.; Xiaochan, W.; Odhiambo, M.O.; Weimin, D. Motion analysis and system response of fertilizer feed apparatus for paddy Variable-Rate fertilizer spreader. Comput. Electron. Agric. 2018, 153, 239–247. [Google Scholar] [CrossRef]
- Ding, S.; Bai, L.; Yao, Y.; Yue, B.; Fu, Z.; Zheng, Z.; Huang, Y. Discrete element modelling (DEM) of fertilizer dual-banding with adjustable rates. Comput. Electron. Agric. 2018, 152, 32–39. [Google Scholar] [CrossRef]
- Chen, C.; He, P.; Zhang, J.; Li, X.; Ren, Z.; Zhao, J.; He, J.; Wang, Y.; Liu, H.; Kang, J. A fixed-amount and variable-rate fertilizer applicator based on pulse width modulation. Comput. Electron. Agric. 2018, 148, 330–336. [Google Scholar] [CrossRef]
- Zeng, S.; Tan, Y.; Wang, Y.; Luo, X.; Yao, L.; Huang, D.; Mo, Z. Structural design and parameter determination for fluted-roller fertilizer applicator. Int. J. Agric. Biol. Eng. 2020, 13, 101–110. [Google Scholar] [CrossRef]
- Yu, H.; Ding, Y.; Liu, Z.; Fu, X.; Dou, X.; Yang, C. Development and Evaluation of a Calibrating System for the Application Rate Control of a Seed-Fertilizer Drill Machine with Fluted Rollers. Appl. Sci. 2019, 9, 5434. [Google Scholar] [CrossRef] [Green Version]
- Niu, K.; Bai, S.; Zhou, L.; Zhao, B.; Liu, L.; Yuan, Y.; Yang, D.; Xiong, S.; Zhang, W. Design and Experimental Research of Variable Formula Fertilization Control System Based on Prescription Diagram. Appl. Sci. 2021, 12, 325. [Google Scholar] [CrossRef]
- Sugirbay, A.M.; Zhao, J.; Nukeshev, S.O.; Chen, J. Determination of pin-roller parameters and evaluation of the uniformity of granular fertilizer application metering devices in precision farming. Comput. Electron. Agric. 2020, 179, 105835. [Google Scholar] [CrossRef]
- Haitao, L.; Yongqian, D.; Hongfeng, Y.; Minfeng, J.; Yizhuo, J.; Xiuqing, F. Signal processing method and performance tests on weighting-sensor-based measuring system of output quantity for a seeding and fertilizing applicator. IFAC-PapersOnLine 2018, 51, 536–540. [Google Scholar] [CrossRef]
- Bhakta, I.; Phadikar, S.; Majumder, K. State-of-the-art technologies in precision agriculture: A systematic review. J. Sci. Food Agric. 2019, 99, 4878–4888. [Google Scholar] [CrossRef]
- Finger, R.; Swinton, S.M.; El Benni, N.; Walter, A. Precision Farming at the Nexus of Agricultural Production and the Environment. Annu. Rev. Resour. Econ 2019, 11, 313–335. [Google Scholar] [CrossRef] [Green Version]
- Guo, S.; Li, J.; Yao, W.; Zhan, Y.; Li, Y.; Shi, Y. Distribution characteristics on droplet deposition of wind field vortex formed by multi-rotor UAV. PLoS ONE 2019, 14, e0220024. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sreekantha, D.D.K. Applications of Unmanned Ariel Vehicles (UAV) in Agriculture: A Study. Int. J. Res. Appl. Sci. Eng. 2018, 6, 1162–1166. [Google Scholar] [CrossRef]
- Hassler, S.C.; Baysal-Gurel, F. Unmanned Aircraft System (UAS) Technology and Applications in Agriculture. Agronomy 2019, 9, 618. [Google Scholar] [CrossRef] [Green Version]
- Latif, M.A. An Agricultural Perspective on Flying Sensors: State of the Art, Challenges, and Future Directions. IEEE Geosci. Remote Sens. Mag. 2018, 6, 10–22. [Google Scholar] [CrossRef]
- Šarauskis, E.; Kazlauskas, M.; Naujokienė, V.; Bručienė, I.; Steponavičius, D.; Romaneckas, K.; Jasinskas, A. Variable Rate Seeding in Precision Agriculture: Recent Advances and Future Perspectives. Agriculture 2022, 12, 305. [Google Scholar] [CrossRef]
- Song, C.; Zang, Y.; Zhou, Z.; Luo, X.; Zhao, L.; Ming, R.; Zi, L.; Zang, Y. Test and Comprehensive Evaluation for the Performance of UAV-Based Fertilizer Spreaders. IEEE Access 2020, 8, 202153–202163. [Google Scholar] [CrossRef]
- Lan, Y.; Thomson, S.J.; Huang, Y.; Hoffmann, W.C.; Zhang, H. Current status and future directions of precision aerial application for site-specific crop management in the USA. Comput. Electron. Agric. 2010, 74, 34–38. [Google Scholar] [CrossRef] [Green Version]
- Sui, R. Performance Assessment of a Variable-Rate Fertilizer Applicator. J. Agric. Sci. 2019, 11, 25–30. [Google Scholar] [CrossRef]
- Song, C.; Zhou, Z.; Zang, Y.; Zhao, L.; Yang, W.; Luo, X.; Jiang, R.; Ming, R.; Zang, Y.; Zi, L.; et al. Variable-rate control system for UAV-based granular fertilizer spreader. Comput. Electron. Agric. 2021, 180, 105832. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Balafoutis, A.T.; Evert, F.K.V.; Fountas, S. Smart Farming Technology Trends: Economic and Environmental Effects, Labor Impact, and Adoption Readiness. Agronomy 2020, 10, 743. [Google Scholar] [CrossRef]
- Hunt, E.R.; Daughtry, C.S.T. What good are unmanned aircraft systems for agricultural remote sensing and precision agriculture? Int. J. Remote Sens. 2017, 39, 5345–5376. [Google Scholar] [CrossRef] [Green Version]
- Reyes, J.F.; Esquivel, W.; Cifuentes, D.; Ortega, R. Field testing of an automatic control system for variable rate fertilizer application. Comput. Electron. Agric. 2015, 113, 260–265. [Google Scholar] [CrossRef]
- Guan, S.; Fukami, K.; Matsunaka, H.; Okami, M.; Tanaka, R.; Nakano, H.; Sakai, T.; Nakano, K.; Ohdan, H.; Takahashi, K. Assessing Correlation of High-Resolution NDVI with Fertilizer Application Level and Yield of Rice and Wheat Crops using Small UAVs. Remote Sens. 2019, 11, 112. [Google Scholar] [CrossRef] [Green Version]
- Feng, S.; Cao, Y.; Xu, T.; Yu, F.; Zhao, D.; Zhang, G. Rice Leaf Blast Classification Method Based on Fused Features and One-Dimensional Deep Convolutional Neural Network. Remote Sens. 2021, 13, 3207. [Google Scholar] [CrossRef]
- Zhao, D.; Feng, S.; Cao, Y.; Yu, F.; Guan, Q.; Li, J.; Zhang, G.; Xu, T. Study on the Classification Method of Rice Leaf Blast Levels Based on Fusion Features and Adaptive-Weight Immune Particle Swarm Optimization Extreme Learning Machine Algorithm. Front. Plant Sci. 2022, 13, 879668. [Google Scholar] [CrossRef]
- Wu, Z.; Li, M.; Lei, X.; Wu, Z.; Jiang, C.; Zhou, L.; Ma, R.; Chen, Y. Simulation and parameter optimisation of a centrifugal rice seeding spreader for a UAV. Biosyst. Eng. 2020, 192, 275–293. [Google Scholar] [CrossRef]
- Alameen, A.A.; Al-Gaadi, K.A.; Tola, E. Development and performance evaluation of a control system for variable rate granular fertilizer application. Comput. Electron. Agric. 2019, 160, 31–39. [Google Scholar] [CrossRef]
- Han, C.-W.; Lee, S.-Y.; Hong, Y.-K.; Kweon, G.-Y. Development of a variable rate applicator for uniform fertilizer spreading. Int. J. Agric. Biol. Eng. 2019, 12, 82–89. [Google Scholar] [CrossRef]
- Chattha, H.S.; Zaman, Q.U.; Chang, Y.K.; Read, S.; Schumann, A.W.; Brewster, G.R.; Farooque, A.A. Variable rate spreader for real-time spot-application of granular fertilizer in wild blueberry. Comput. Electron. Agric. 2014, 100, 70–78. [Google Scholar] [CrossRef]
- Azis, A.; Setiawan, R.P.A.; Hermawan, W.; Mandang, T. Dynamic performance test of auger-type metering device for Variable Rate Fertilizer Applicator (VRFA). IOP Conf. Ser. Earth Environ. Sci. 2020, 486, 012064. [Google Scholar] [CrossRef]
- Saleem, S.; Zaman, Q.; Schumann, A.; Madani, A.; Chang, Y.; Farooque, A. Impact of variable rate fertilization on nutrients losses in surface runoff for wild blueberry fields. Appl. Eng. Agric. 2014, 30, 179–185. [Google Scholar]
- Tang, X.Y.; Chen, Y.Z.; Peng, Y.K.; Wang, X.; Xu, Y.; Yang, W.L.; Wang, W. A DSP-Based Control System for Precision Variable Rate Fertilization. Adv. Mater. Res. 2013, 605, 1408–1414. [Google Scholar] [CrossRef]
- Yuan, J.; Liu, C.-L.; Li, Y.-M.; Zeng, Q.; Zha, X.F. Gaussian processes based bivariate control parameters optimization of variable-rate granular fertilizer applicator. Comput. Electron. Agric. 2010, 70, 33–41. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, G.; Luo, C.; Hu, H.; Huang, J. MOEA/D-DE based bivariate control sequence optimization of a variable-rate fertilizer applicator. Comput. Electron. Agric. 2019, 167, 105063. [Google Scholar] [CrossRef]
- Ishola, T.A.; Yahya, A.; Shariff, A.R.M.; Aziz, S.A. A Novel Variable Rate Pneumatic Fertilizer Applicator. Instrum. Sci. Technol. 2014, 42, 369–384. [Google Scholar] [CrossRef]
- Grafton, M.C.E.; Irwin, M.E.; Sandoval-Cruz, E.A. Measuring the response of variable bulk solid fertiliser application by computer-controlled delivery from aircraft. N. Z. J. Agric. Res. 2021, 1–13. [Google Scholar] [CrossRef]
- Li, J.Y.; Lan, Y.B.; Zhou, Z.Y.; Zeng, S.; Huang, C.; Yao, W.; Zhang, Y.; Zhu, Q.Y. Design and test of operation parameters for rice air broadcasting by unmanned aerial vehicle. Int. J. Agric. Biol. Eng. 2016, 9, 24–32. [Google Scholar]
- Wen, S.; Zhang, Q.; Deng, J.; Lan, Y.; Yin, X.; Shan, J. Design and Experiment of a Variable Spray System for Unmanned Aerial Vehicles Based on PID and PWM Control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef] [Green Version]
- Song, L.; Wen, L.; Chen, Y.; Lan, Y.; Zhang, J.; Zhu, J. Variable-rate Fertilizer Based on a Fuzzy PID Control Algorithm in Coastal Agricultural Area. J. Coast. Res. 2020, 103 (Suppl. 1), 490–495. [Google Scholar] [CrossRef]
- Jiao, J.; Chen, J.; Qiao, Y.; Wang, W.; Wang, C.; Gu, L. Single Neuron PID Control of Agricultural Robot Steering System Based on Online Identification. In Proceedings of the 2018 IEEE Fourth International Conference on Big Data Computing Service and Applications (Big Data Service), Bamberg, Germany, 26–29 March 2018; pp. 193–199. [Google Scholar]
- GB/T 5262-2008; Agricultural Machinery Test Conditions—General Provisions for Determination Methods. Standards Press of China: Beijing, China, 2008. (In Chinese)
- ISO 5690-1:1985; Equipment for Distributing Fertilizers—Test Methods—Part 1: Full Width Fertilizer Distributors. ISO Copyright Office: Geneva, Switzerland, 1985.
- Guo, S.; Li, J.; Yao, W.; Hu, X.; Wei, X.; Long, B.; Wu, H.; Li, H. Optimization of the factors affecting droplet deposition in rice fields by rotary unmanned aerial vehicles (UAVs). Precis. Agric. 2021, 22, 1918–1935. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, G.; Huang, J.; Zhang, Y. A Study on the Time Lag and Compensation of a Variable-Rate Fertilizer Applicator. Appl. Eng. Agric. 2021, 37, 43–52. [Google Scholar] [CrossRef]
- Chen, M.; Yang, Z.; Wang, X.; Shi, Y.; Zhang, Y. Response characteristics and efficiency of variable rate fertilization based on spectral reflectance. Int. J. Agric. Biol. Eng. 2018, 11, 152–158. [Google Scholar] [CrossRef] [Green Version]
- Zha, X.; Zhang, G.; Han, Y.; Salem, A.E.; Fu, J.; Zhou, Y. Structural Optimization and Performance Evaluation of Blocking Wheel-Type Screw Fertilizer Distributor. Agriculture 2021, 11, 248. [Google Scholar] [CrossRef]
- Jin, X.; Zhao, K.; Ji, J.; Qiu, Z.; He, Z.; Ma, H. Design and experiment of intelligent monitoring system for vegetable fertilizing and sowing. J. Supercomput. 2018, 76, 3338–3354. [Google Scholar] [CrossRef]
- Sharma, A.; Singh, P.K.; Sharma, A.; Kumar, R. An efficient architecture for the accurate detection and monitoring of an event through the sky. Comput. Commun. 2019, 148, 115–128. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware Name | Optional Model | Working Parameters | Manufacturers |
|---|---|---|---|
| Central Processor | STM32F103ZET6 | 32-bit ARM Cortex-M3 CPU; operating frequency: 72 MHz | Long Yi Electronics, Technology Co., Shanghai, China |
| Positioning Module (RTK) | Beidou K823 | Single point positioning accuracy: H < 1.5 m. V < 3 m (1σ, PDOP < 4) | Sinan Satellite Navigation, Technology Co., Shanghai, China |
| Speed measurement Sensors | YS-27 | Speed measurement range: 0–2000 r/min Operating voltage 3.3–5 V | Xinwei Technology, Development Co., Shenzhen, China |
| DC Motor | ZGA25RP | Rated voltage 24 V. Rated power 1.2 W. Max. speed 1000 r/min | Fujishaku Electromechanical Equipment, Co., Foshan, China |
| Metal Standard Servo | MG995 | Working current 100 MA. Working torque 13 kg/cm | Desheng Intelligent Technology, Ltd., Dongguan, China |
| Power Modules | GS24002S1 | Capacity 2400 mh Standard voltage 7.4 v | Grip Battery, Ltd., Shenzhen, China |
| Materials | Average | Particle | Size |
|---|---|---|---|
| CF | 3.0 | 29.01 | 33.95 |
| UR | 1.8 | 24.97 | 30.02 |
| Treatment | Retraction of Baffle/% | Spreading Disc Speed (r/min) | ||||
|---|---|---|---|---|---|---|
| T1 | 2 | 200 | 400 | 600 | 800 | 1000 |
| T2 | 4 | 200 | 400 | 600 | 800 | 1000 |
| T3 | 6 | 200 | 400 | 600 | 800 | 1000 |
| T4 | 8 | 200 | 400 | 600 | 800 | 1000 |
| T5 | 10 | 200 | 400 | 600 | 800 | 1000 |
| Level | Baffle Opening q/% | Spreading Disc Speed r/min | Flight Height h/m |
|---|---|---|---|
| 1 | 4 | 400 | 1.5 |
| 2 | 6 | 600 | 2 |
| 3 | 8 | 800 | 3 |
| Performance Indicators | Rise Time/s | Overshoot/% | Steady-State Error/% |
|---|---|---|---|
| SNPID | 0.131 | 0.00 | 0 |
| INPID | 0.585 | 0.15 | 0 |
| Control Method | Set Speed r/min | Overshoot /% | Rise Time /s | Average Absolute Error/% |
|---|---|---|---|---|
| SNPID | 100 | 3.85 | 0.9 | 5.74 |
| 300 | 3.03 | 0.9 | 6.45 | |
| 500 | 2.91 | 0.85 | 7.30 | |
| INPID | 100 | 8.56 | 1.2 | 8.96 |
| 300 | 7.64 | 1.1 | 10.56 | |
| 500 | 9.85 | 1.4 | 11.43 |
| Treatment | Test Factors | a | b | ||||
|---|---|---|---|---|---|---|---|
| A | B | null | C | ||||
| 1 | 1 | 1 | 1 | 1 | 13.71 | 10.83 | |
| 2 | 1 | 2 | 2 | 2 | 11.98 | 7.02 | |
| 3 | 1 | 3 | 3 | 3 | 12.93 | 10.35 | |
| 4 | 2 | 1 | 2 | 3 | 11.76 | 8.95 | |
| 5 | 2 | 2 | 3 | 1 | 9.80 | 7.65 | |
| 6 | 2 | 3 | 1 | 2 | 12.05 | 9.31 | |
| 7 | 3 | 1 | 3 | 2 | 15.43 | 10.41 | |
| 8 | 3 | 2 | 1 | 3 | 14.27 | 9.75 | |
| 9 | 3 | 3 | 2 | 1 | 13.22 | 11.03 | |
| Cv | k1 | 12.88 | 13.63 | 12.24 | A > B > C | ||
| k2 | 11.20 | 12.02 | 13.15 | ||||
| k3 | 14.30 | 12.73 | 12.99 | ||||
| R | 3.10 | 1.61 | 0.91 | ||||
| λ | k1 | 9.40 | 10.06 | 9.84 | B > A > C | ||
| k2 | 8.64 | 8.14 | 8.91 | ||||
| k3 | 10.40 | 10.23 | 9.68 | ||||
| R | 1.76 | 2.09 | 0.93 | ||||
| Evaluation Indicators | Source of Variation | Square | Degree of Freedom | Mean Square | F | Significance |
|---|---|---|---|---|---|---|
| Cv | A | 14.474 | 2 | 7.237 | 9.070 | ** |
| B | 3.937 | 2 | 1.969 | 2.467 | * | |
| C | 1.408 | 2 | 0.704 | 0.883 | * | |
| λ | A | 4.674 | 2 | 2.337 | 3.357 | * |
| B | 8.095 | 2 | 4.048 | 5.814 | ** | |
| C | 1.469 | 2 | 0.734 | 1.055 | * |
| Set Speed/r·Min−1 | Overshoot/% | Rise Time/s | Average Absolute Error/% |
|---|---|---|---|
| 400 | 5.62 | 0.74 | 3.62 |
| 600 | 6.10 | 0.92 | 3.94 |
| 800 | 6.57 | 0.78 | 2.98 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, D.; Yao, W.; Yu, F.; Liu, Y.; Zheng, Z.; Wang, Y.; Xu, T.; Chen, C. Single-Neuron PID UAV Variable Fertilizer Application Control System Based on a Weighted Coefficient Learning Correction. Agriculture 2022, 12, 1019. https://doi.org/10.3390/agriculture12071019
Su D, Yao W, Yu F, Liu Y, Zheng Z, Wang Y, Xu T, Chen C. Single-Neuron PID UAV Variable Fertilizer Application Control System Based on a Weighted Coefficient Learning Correction. Agriculture. 2022; 12(7):1019. https://doi.org/10.3390/agriculture12071019
Chicago/Turabian StyleSu, Dongxu, Weixiang Yao, Fenghua Yu, Yihan Liu, Ziyue Zheng, Yulong Wang, Tongyu Xu, and Chunling Chen. 2022. "Single-Neuron PID UAV Variable Fertilizer Application Control System Based on a Weighted Coefficient Learning Correction" Agriculture 12, no. 7: 1019. https://doi.org/10.3390/agriculture12071019