1. Introduction
Peanut is an important cash crop in China, with high planting income and wide planting range [
1]. According to the statistics of the United Nations Food and Agriculture Organization (FAO), the peanut planting area in China in 2019 was 4.63 × 10
6 hm
2, ranking second in the world. The output was 1.75 × 10
7 t, ranking first in the world. Although China has a wide planting area and a large export output, peanut production in most areas is mainly manual and semi-mechanized, especially in the harvesting process, where the labor consumption accounts for about one-third of the whole production process and the operation cost accounts for about 50% of the total production cost. Especially with the development of urbanization, the loss of young rural labor force is serious, which leads to the increase in rural labor cost, which seriously restricts the production and development of the peanut industry [
2,
3,
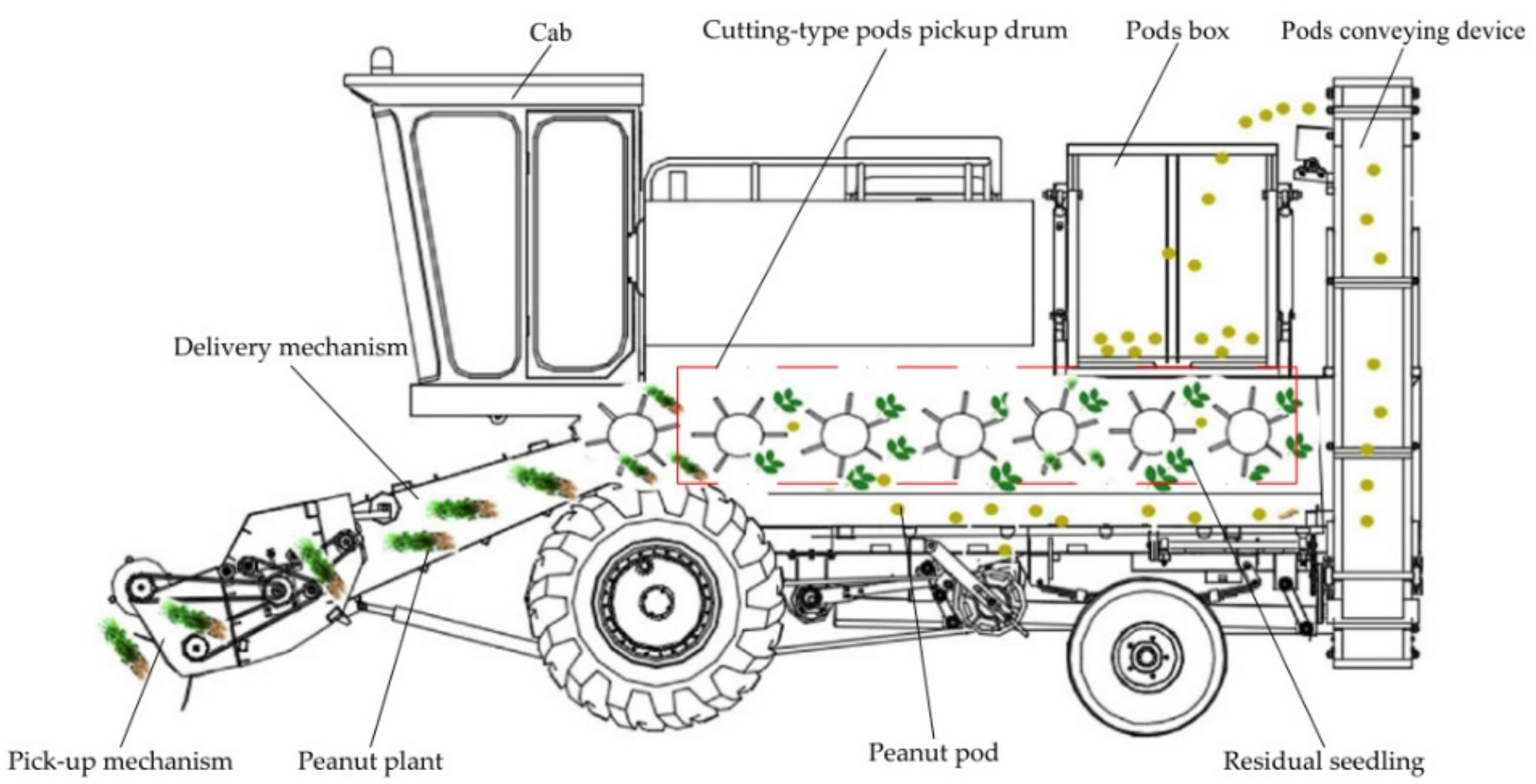
4]. At present, the peanut harvester, which is developing rapidly in China, can effectively solve this problem. It can complete peanut pickup, pod pickup, pod gathering and other harvesting operations at one time, with a production efficiency of 0.6–0.8 hm
2/h, which greatly liberates the labor force, improves the harvesting efficiency and reduces the production cost [
5,
6].
However, during the investigation of peanut harvesting operations in Henan, Shandong, Anhui and other places in China during 2018–2021, our research team found that the missed pickup rate of many machines was up to 4.2% and the crushed rate was up to 6.5%, which brought hundreds of thousands of tons of peanut losses to China every year. The research found that there were two main reasons for the high missing-pickup and crushed rate. One was that the core operating component—the pickup drum—was not uniform. This is because at present there are three types of pod-pickup drums used in peanut harvesting: axial flow, tangential–axial flow and tangential flow. These three drums have different structures, which lead to different processes of hitting and kneading the picked peanut plants, and then lead to different peanut missing-pickup rate and crushing rate. The second reason was that there are significant differences in peanut plant traits, physical and mechanical properties during pod pickup; the characteristics of plant type, plant height, stalk strength, plant water content, pod water content and pod range of different peanut varieties directly affect the rate of missing and broken pods during peanut harvest. The tensile strength of peanut stalks, the crushed force of pod shells and the friction force between pods and stems vary for different varieties and variable water contents of peanuts, and the forces exerted by different pod-pickup drums on different varieties and variable water contents of peanuts are also different. Field experiments and peanut biology showed that peanut varieties with upright plant type, moderate plant height (0.5~0.6 m), weak stalk toughness, concentrated pod and high shell strength are the best choices for pickup pods. These two reasons led to the high missed pickup rate and crushed rate in peanut harvesting process in China’s main peanut-producing areas, and the operation effect of the same machine on the same variety and variable water content at different time periods was also quite different, which caused the large peanut growers in China to be concerned about the selection of pickup and harvesting machines and the operation quality. Therefore, it was of great significance for efficient, low loss and smooth harvesting of peanuts in China to explore the best harvesting conditions and effects (low missed-pickup rate and low crushed rate) of different types of pickup drums, which has presently become a subject that must be considered in the field of pickup and harvesting peanuts in China.
Concerning the development and present situation of peanut pickup technology in the world, a few countries such as the United States have already fully realized large-scale peanut harvesting mechanization with high pickup quality, while Asian peanut-producing countries such as India, Myanmar, Indonesia and Vietnam, and African peanut-producing countries such as Nigeria, Senegal and Sudan are still dominated by manual harvesting. At present, KMC, AMADAS, PEARMAN and other companies in the United States are representatives of advanced peanut pickup and harvesting technologies. Additionally, there are “shovel chain combination” of KMC and AMADAS and “shovel clamp combination” series peanut pickup and harvesting machines produced by PEARMAN. The main operating machines are digging harvesters and pickup combine harvesters, and the related technologies, which lead the industry [
7]. The harvester is mainly composed of shovel, conveyor, turning wheel, frame and other main components. According to different mechanism forms and working principles, the harvester is mainly composed of picker, screw feeder, pod-pickup drum, cleaning system, pods collecting box, among others. The typical process of peanut pickup and harvesting in the United States is initially digging, laying and drying by a digging harvester; then, after two to three days, when the water content of peanuts reaches a low level, harvest is completed by a pickup combine harvester.
In recent years, scholars have researched techniques of peanut pickup. Yu et al. [
8] carried out pickup experiments on a single peanut variety with three water contents in a mobile peanut harvester, and obtained some conclusions. Chen et al. [
9], based on the study of the mechanical properties of fresh and wet peanuts and the mechanical characteristics of pods stalk nodes, analyzed the impact performance of peanut pods, screw auger type pod-pickup drum, parameters and performance. Wang et al. [
10] studied the working principle and performance of peanut pickup and harvesting drum from both theoretical and experimental aspects, and optimized the parameters such as the outer diameter and length of pickup drum, the rotating speed of pickup drum, the distance between pickup drum and intaglio, etc. The primary and secondary factors affecting peanut missing-pickup rate were obtained by Yu et al. [
11], in a study that carried out tests to obtain the structure and working parameters of the tangential-flow double-drum threshing and separating device, the threshing and separating performance tests of different drum speeds, different pickup gaps and different feed inlet inclination angles. Guo et al. [
12] optimized the design of the pickup drum of the simple axial-flow peanut harvester, and made an experimental study on the pod crushed rate.
Through this search and analysis of literature from China and worldwide, it is found that the current research on peanut pickup quality mainly includes two aspects: one is to carry out mechanical tests on each unit of the peanut plant, such as stalks and pods, and measure relevant data; the other is to improve and optimize the structural parameters, motion parameters and structural configuration of the pickup drum. At present, there are some broad applications of peanut harvesters, but the basic experimental research on peanut pickup is relatively lacking. It should be emphasized that the harvesting conditions of peanut such as water content, soil and mechanical properties of each unit of plant are a dynamic change process, and the dynamic process has different effects with different types of peanut pickup drums, and the effects of peanut pickup drums on the same peanut variety with variable water content are also different. At present, during the rapid development of the pickup harvester in China, the problems of missed-pickup rate and crushed rate caused by the inside pickup drum are exposed, which makes it necessary for us to analyze and test the three main peanut pickup drums for different varieties under variable water content conditions.
It should be noted that there is currently no research available that provides a comprehensive and scientific comparative test of different varieties with variable water contents by various pickup drums of the picker. We need to solve some scientific problems. The first is to analyze the working mechanism of three different types of pod-pickup drums and reveal the characteristics of different types of pod-pickup drums. The second research task is to make a comparative experimental study of two peanut varieties at variable water contents by continuously tracking three different types of pickup drums, in order to obtain different rules for missing-pickup and pod crushed rates, and to provide theoretical basis for solving the problems of high missing-pickup rate and high crushed rate, and also to provide basis for performance optimization of pickup drums of peanut harvesters.
4. Discussion
At present, peanut pickup and harvesting operations are becoming one of the most important peanut harvesting modes in China. The missed-pickup rate and crushed rate of peanut pods in this mode directly affect or even determine the influence of this mode. This paper reports the missed-pickup rate, missed-pickup quality distribution, crushed rate and quality distribution of pods with different degrees of crushing for two peanut varieties under variable water content levels, based on different pickup drums. It is of great theoretical and practical significance to improve the working performance of peanut pickup and harvesting machines, and to select the best pickup drum and the most suitable water content conditions for each peanut variety, so as to improve and reduce the missed-pickup rate and crushed rate. In this study, through T1, T2, T3, CK experiments, the representative peanut varieties currently planted in large areas of China were tested. The purpose was to judge and compare the pickup quality and adaptability of different pickup drum design to typical peanut varieties through the pod missing-pickup rate and pod crushed rate, because the negative cost of missing-pickup was higher than the crushed cost. Therefore, from the resulting data, the order of pickup quality from good to poor was T1, T2, T3, CK.
In the aspect of pod missing-pickup rate, Guan [
13] tested three types of axial-flow type, tangential-flow type and tangential-flow type with optimal parameters, and the pickup rate of the optimal indexes of each combination of pickup and drumming was in the range 95.45%~99.46%, among which the missing-pickup rates of axial-flow type, tangential-flow type and tangential-flow type with parameters were 1.49%, 1.46% and 2.77%, respectively. Zhou [
21] tested the tangential-flow-type pod-pickup drum (T3 type) with the optimal parameters, and the test result was that the missed-pickup rate was 3.2%. Zhou [
21] found that the missed-pickup rate decreased with the decrease in peanut water content, because the crushing force of peanut stalks increased with the increase in peanut water content. The conclusion of Zhou’s study was partially the same as that of our conclusion, with the main difference that, in this study, it was considered that the rate of missed-pickup first increased and then decreased with the increase in water content, because the strength of the stalk was the greatest around 41% water content, and then its tensile strength decreased with the increasing water content. Therefore, the rate of missed-pickup decreased. The reason why these two conclusions are not completely the same is that Zhou [
21] used different peanut varieties from those studied in this paper, creating differences in the mechanical properties of the plants and stalks. In particular, Guan, Zhou and others [
21] did not study the mass proportion of the three kinds of missed pickup pods, and there is no other research and related reports internationally, so this was also one of our innovations. In this study, it was concluded that small pods account for about 70% of the missed pods, medium pods account for about 20% and large pods account for about 10%. Because of their large size, medium pods and large pods are more likely to be captured by the mechanical parts of the drum and separated from the source plant. Therefore, we can start from the aspect of variety cultivation, and study and cultivate peanut varieties with the same growth of pods. In the harvest period, the peanut varieties with medium pods and large pods are basically in the pods layer.
In terms of crushed rate, Chen [
9] tested the axial-flow pod-pickup drum (T1 type) with the best parameters, and the test result was that the crushed rate was 0.89%. Guan [
13] tested the tangential–axial-flow type (T2 type) with optimal parameters, and the test result showed that the crushed rate was 1.1%. Zhou and others [
21] tested the tangential-flow pods-pickup drum (T3 type) with optimal parameters, and the test result showed that the crushed rate was 4.91%. Although the numerical values of the crushed rate were different from those of the previous study, Zhou and others showed that the crushed rate of pods was T1, T2, T3, from small to large, which was the same as that of this study, demonstrating the rationality of this study. Guan [
13] found that the main reasons for the influence of drying time and water content on the bursting strength of peanut pods were as follows: at the early stage of peanut harvest, fresh peanut shells had higher water content, stronger toughness and higher bursting strength; with the decrease in water content, the toughness and compressive strength of peanut shells decreased, and when the water content tended to be constant, the crush strength also reached the minimum value, leading to a lower crushed rate, which was not exactly the same as the conclusion of this paper. This paper suggests that the crushed rate relates mainly to peanut plants and shells.
When three types of pickup drums are working, pods with water content ranging from 20% to 29% are the better choice. At this time, the friction between the pods and the mechanical parts becomes smaller, which makes the pods easier to detach and reduces the number of collisions by the mechanical parts in the drum, thus contributing to the reduction of the missing pickup rate and the crush rate of the pods.
This research provides experimental innovations, but there are some limitations:
(1) Because of the subjective and objective factors such as time and conditions, the movement rules and details of the peanut pickup performance test were lacking. Next, the movement characteristics and rules of peanut plants and pods in different pickup drums should be thoroughly analyzed and studied by means of high-resolution high-speed photography.
(2) Limited by the research scheme and test conditions, the test object in this research was only two peanut varieties, but the crush force of the stalk and the crush force of the shell and its mechanical properties of different peanut varieties are different with variable water content, the movement mode and stress mode of each part of the plant and each element of the pickup drum, and the peanut plant in different drums. In the follow-up test, more peanut varieties will be studied, the operation index rule for various pickup drums under variable water content will be explored, and the most suitable for each peanut variety will be determined.
(3) During the experiment, all four kinds of pickup test platforms were moving at a speed of 1.2 m/s, but they may have different pickup quality and effects at other speeds. We hope to further carry out pickup tests of the three types of pickup drums at speeds of 1.1, 1.3 and 1.4 m/s, and compare the results with this experiment to determine if there are any differences.
(4) Because different operators had different proficiency in using the test platforms, it was difficult for the four kinds of pickup test platforms to operate with their best working parameters. Therefore, there was a certain deviation between the data obtained by the test and their real effects. Before the next test, the operators will be trained uniformly to reduce the errors caused by the operation.
5. Conclusions
Three kinds of axial-flow (T1), tangential--axial flow (T2) and tangential-flow (T3) pods-pickup drums were set up, and they were installed on the pick-up harvester to form three kinds of pick-up and harvest test stands.Comparative experiments using two peanut varieties with variable water contents were conducted by continuously tracking three different types of pod-pickup drum test stands, and different rules of missed-pickup and crushed pods were obtained, which provided theoretical basis for solving the problems of high missed-pickup and crushed rate, and also provided a basis for performance optimization of the pod-pickup drum of peanut pickup harvesters. The main conclusions follow:
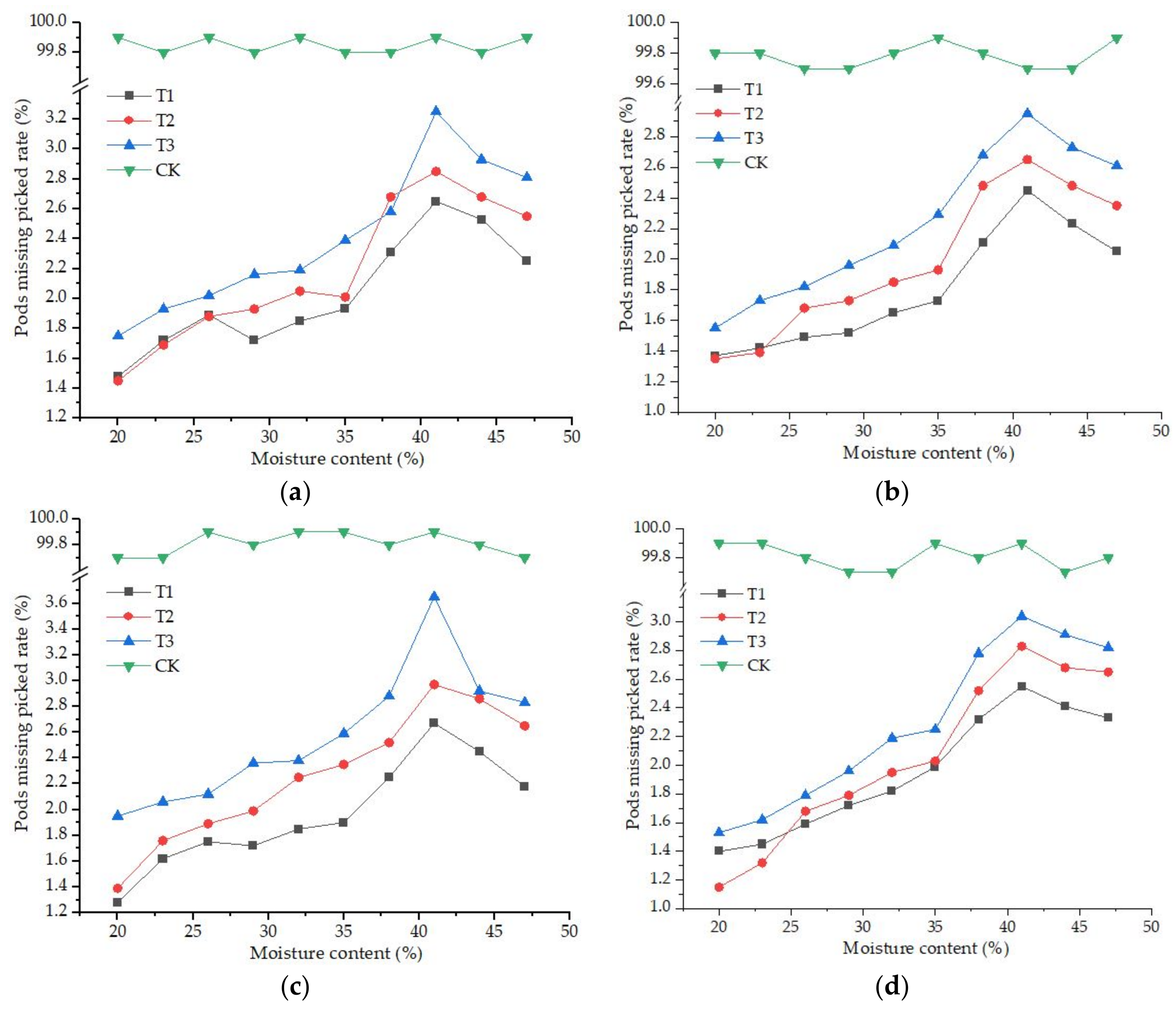
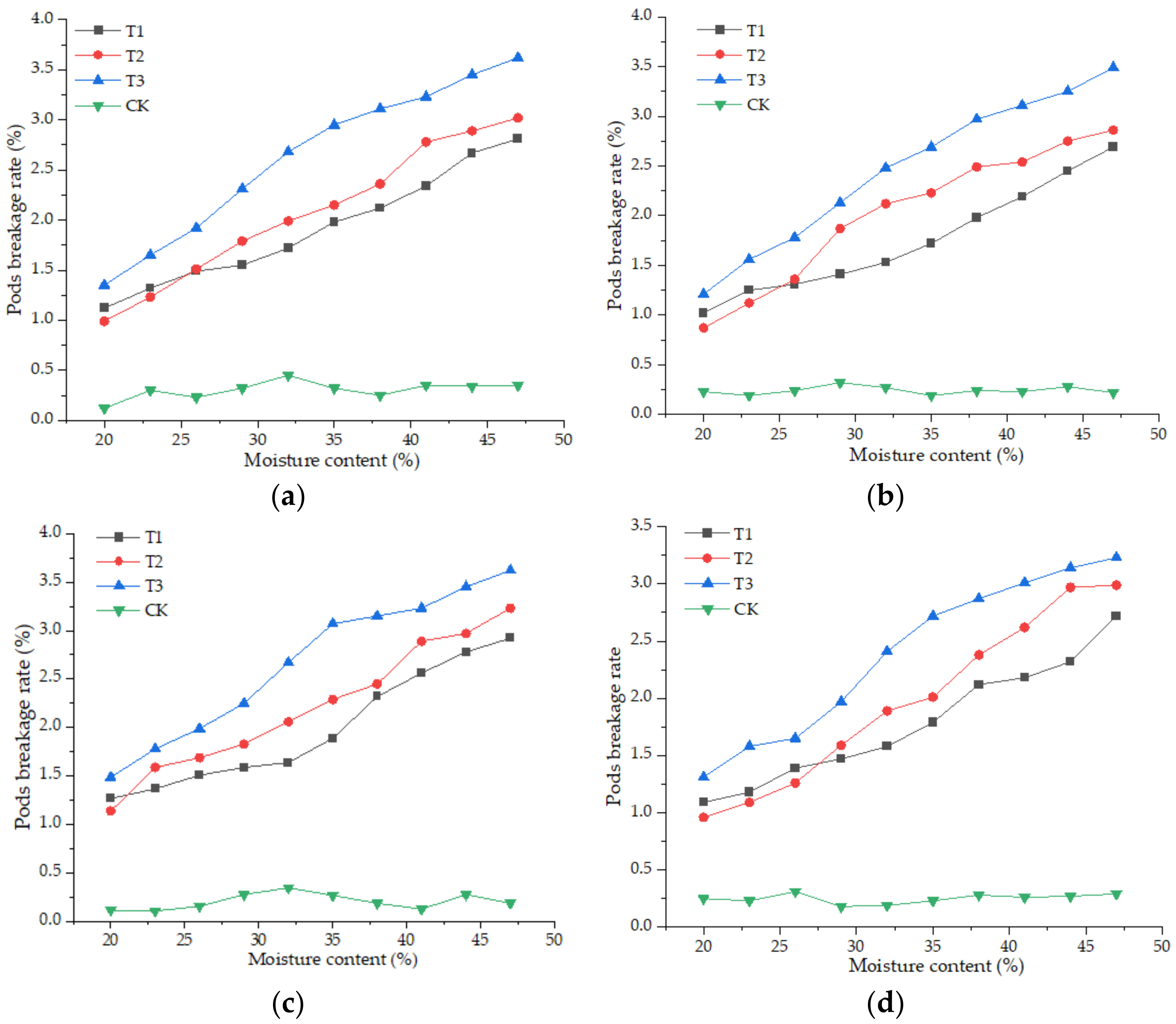
(1) The test curves of missed-pickup rate of two kinds of peanuts, shown in
Figure 3, are one of the important findings of the test. The curves show that the effects of T1, T2 and T3 on the change trend of missed-pickup rate of two peanut varieties under variable water contents were extremely consistent, and the average missed-pickup rates of T1, T2 and T3 for Shanhua 9 in two years were 1.76%, 1.97% and 2.48%, and for Huayu22 in two years were 2.04%, 2.21% and 2.69. The regularity of T1, T2 and T3 on the two varieties at variable water content levels was also reflected in the following observations: when the water content was 20%~35%, the missed-pickup rate of the two varieties increased slowly with the water content, while when the water content was 36%~44%, the missed-pickup rates all rose sharply and then decreased. The maximum average missed-pickup rate of T1, T2 and T3 on Shanhua 9 in two years was 1.91%.
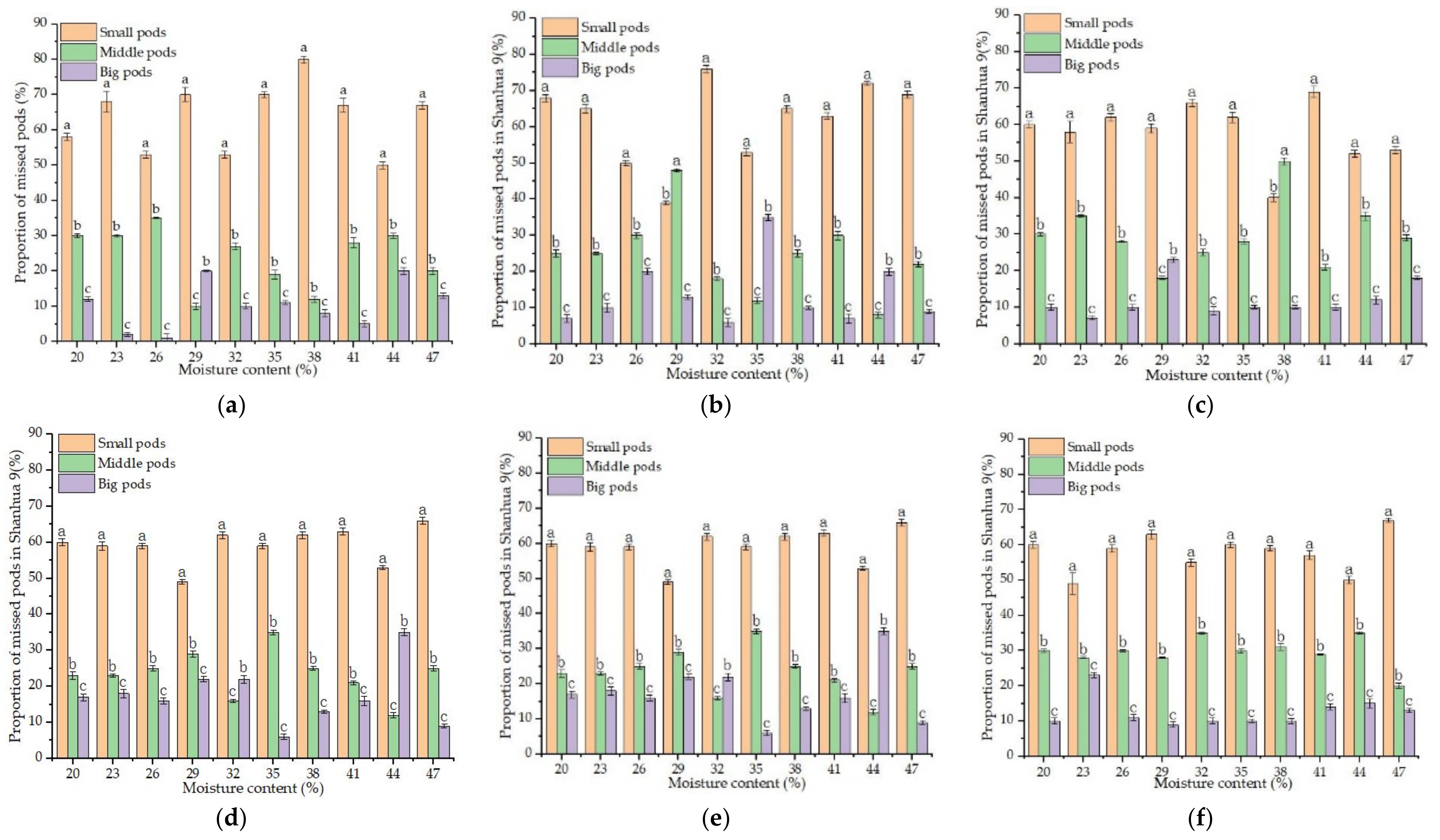
(2) The data in
Figure 4 show that T1, T2 and T3 had obvious consistency in the distribution of missed-pickup rate of the two peanut varieties under variable water contents. After T1, T2 and T3 tests on the two peanut varieties, the missing-pickup of small pods was the largest, followed by medium and large pods, and the average missing-pickup mass ratio of small, medium and large pods after T1, T2 and T3 tests on Shanhua 9 was 6.2:2.9:0.9. After T1, T2 and T3 tests on Huayu22, except for individual water content, among the missed pods after the T1 drum test, small pods were missed the most and large pods were missed the least, and the average weight ratio of small, medium and large pods was 5.8:3.1:1.1. The test showed that small pods were more likely to be missed.
(3) The data in
Figure 5 show that the average pod crushed rate of T1, T2 and T3 for Shanhua 9 was 2.06%, 2.19% and 2.45%, and that of T1, T2 and T3 for Huayu22 was 1.74%, 1.91% and 2.23%, so the pickup quality was from good to poor: T1, T2 and T3. The possible reason was that there was only one drum in T1, the peanut plant moves smoothly, and it was not easy to break. However, there were two tangential and axial drums in T2, which easily impacted the pods when the two drums were alternately struck during pod pickup. However, in T3, the pod crushed rate of two peanut varieties under variable water contents was significantly higher than that in T1 and T2. The possible reason was that there were multiple tangential drums in T3, which alternately struck peanut pods at high frequency during pod pickup, resulting in higher pod crushed rate. At the same time, the pod crushed rate of the two peanut varieties increased with the increase in water content, and the pod crushed rates of T1, T2 and T3 for the two varieties all decreased significantly with the decrease in water content, and the average pod crushed rate for Huayu22 was significantly lower than that for Shanhua 9, because the pod shell strength of Huayu22 was slightly higher than that for Shanhua 9 at various water contents, and the shell was less likely to be damaged.
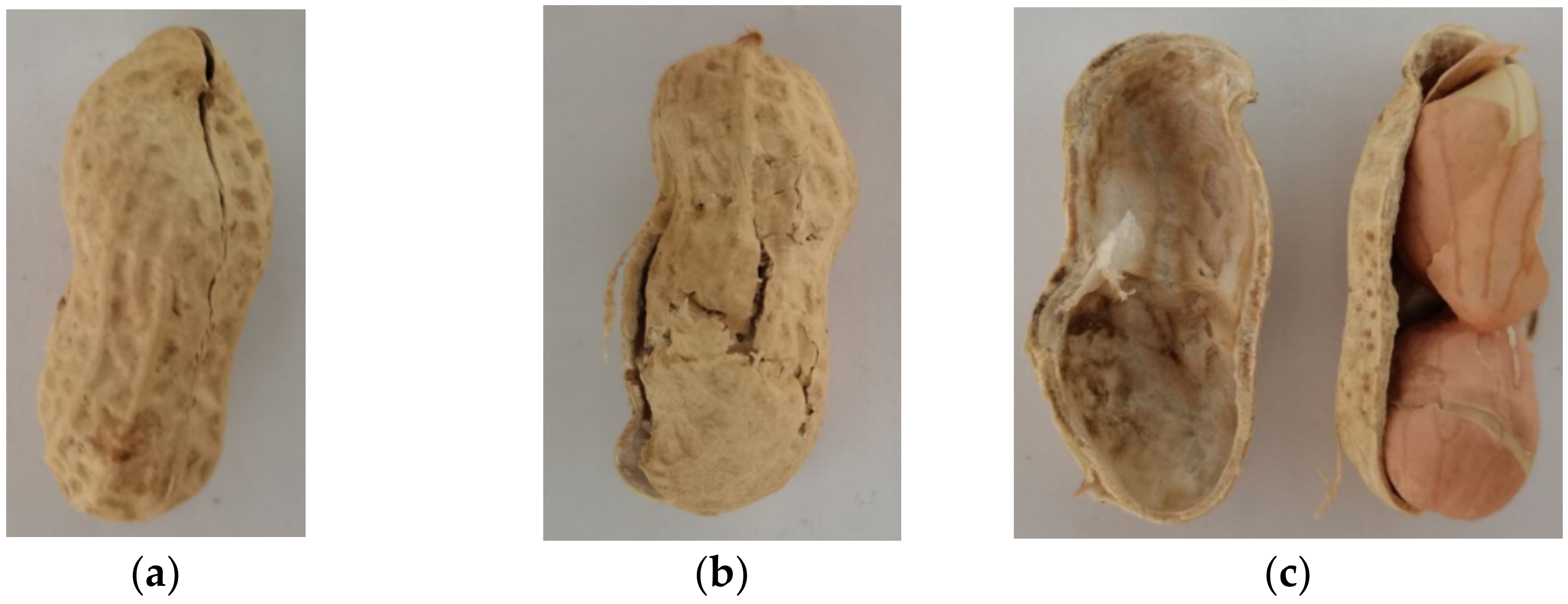
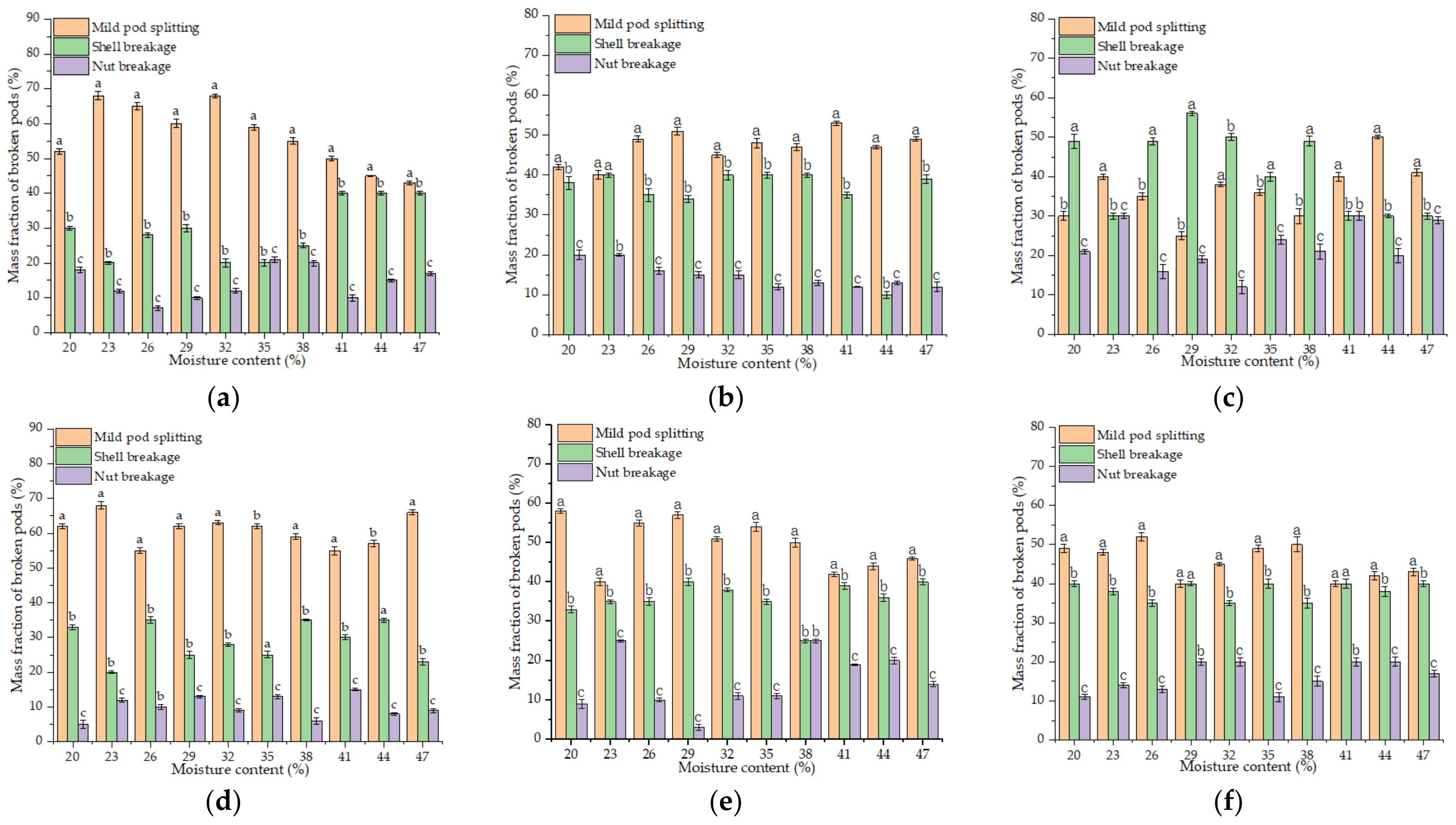
(4) The data in
Figure 7 show that the average mass ratio of T1 to the three crushed conditions after the test of Shanhua 9 was 5.7:3.2:0.9; After T2 test on Shanhua 9, the average mass ratio of the three crushed cases was 4.8:4.1:1.1; After the T3 test on Shanhua 9, the average mass ratio of the three kinds of crushed pods was 4.1:4.3:1.6. It can be observed that the proportion of medium and severely crushed pods after the T3 test was the least, followed by T2, and the highest was T3. The higher the water content, the higher the proportion of medium and severely crushed pods. The average mass ratio of three kinds of crushed conditions after the T1 Huayu22 test was 6.2:2.9:0.9; After the T2 Huayu22 test, the average mass ratio of three crushed cases was 5: 4: 1; After the T3 test of Huayu22, the average mass ratio of the three kinds of crushed cases was 4.4:4.3:1.3. The proportion of medium and severely crushed of crushed pods after T3 test was the least, followed by T2, and T3 was the highest, and the higher the water content, the higher the proportion of medium and severely crushed pods. The reason was similar to that of Shanhua 9. Another remarkable feature of the two peanut varieties was that the average proportion of medium and severely crushed pods after the T1, T2 and T3 tests was obviously less than that of Shanhua 9. The reason might be that the shell strength, thickness and toughness of Huayu22 were greater than that of Shanhua 9. Under the same pickup conditions, there were fewer crushed pods.
(5) In the optimum water content operation range, the most suitable drum was used for peanut pod pickup, and the average missed-pickup rate was 1.8% lower than the current machine arrangements, and the average crushed rate was 2.2% lower than the current machine arrangements.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}