
Design and Experiment of Automatic Clip-Feeding Mechanism for Vegetable-Grafting Robot

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
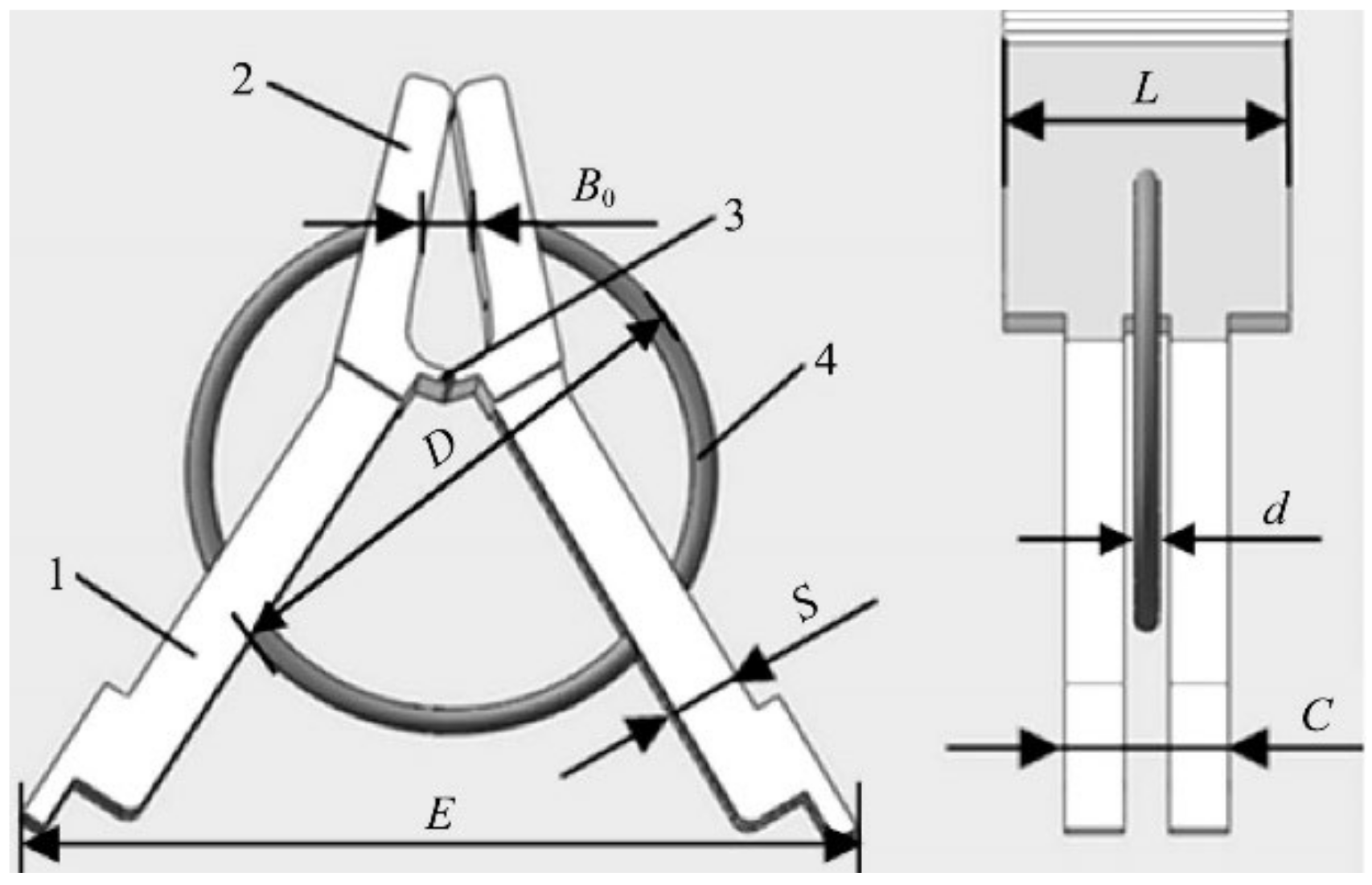
2.1. Parameters of the Grafting Clip
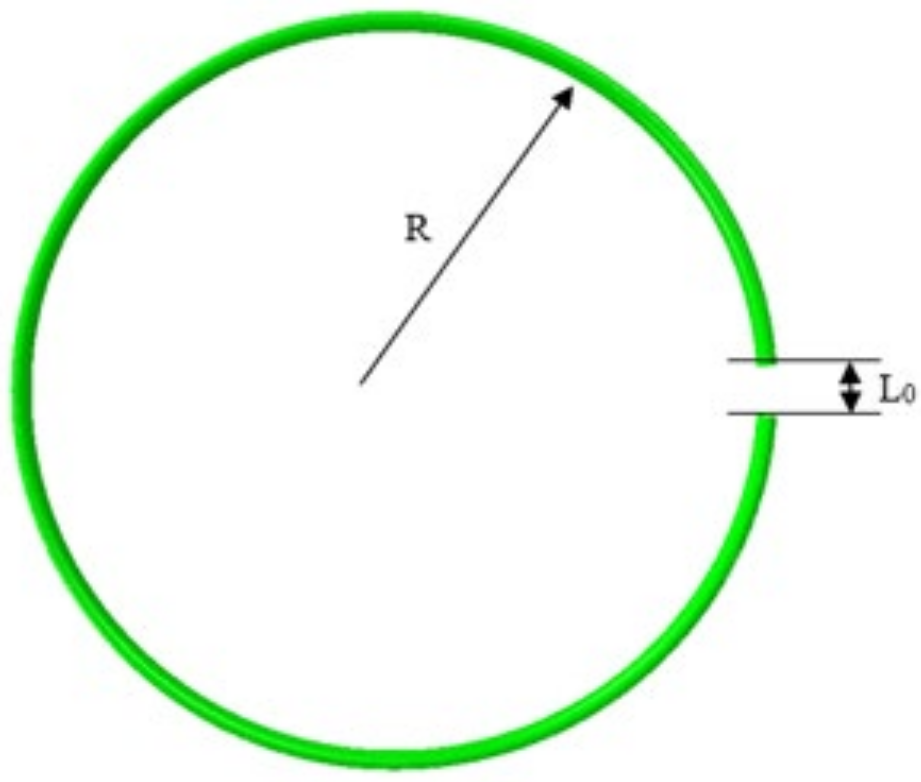
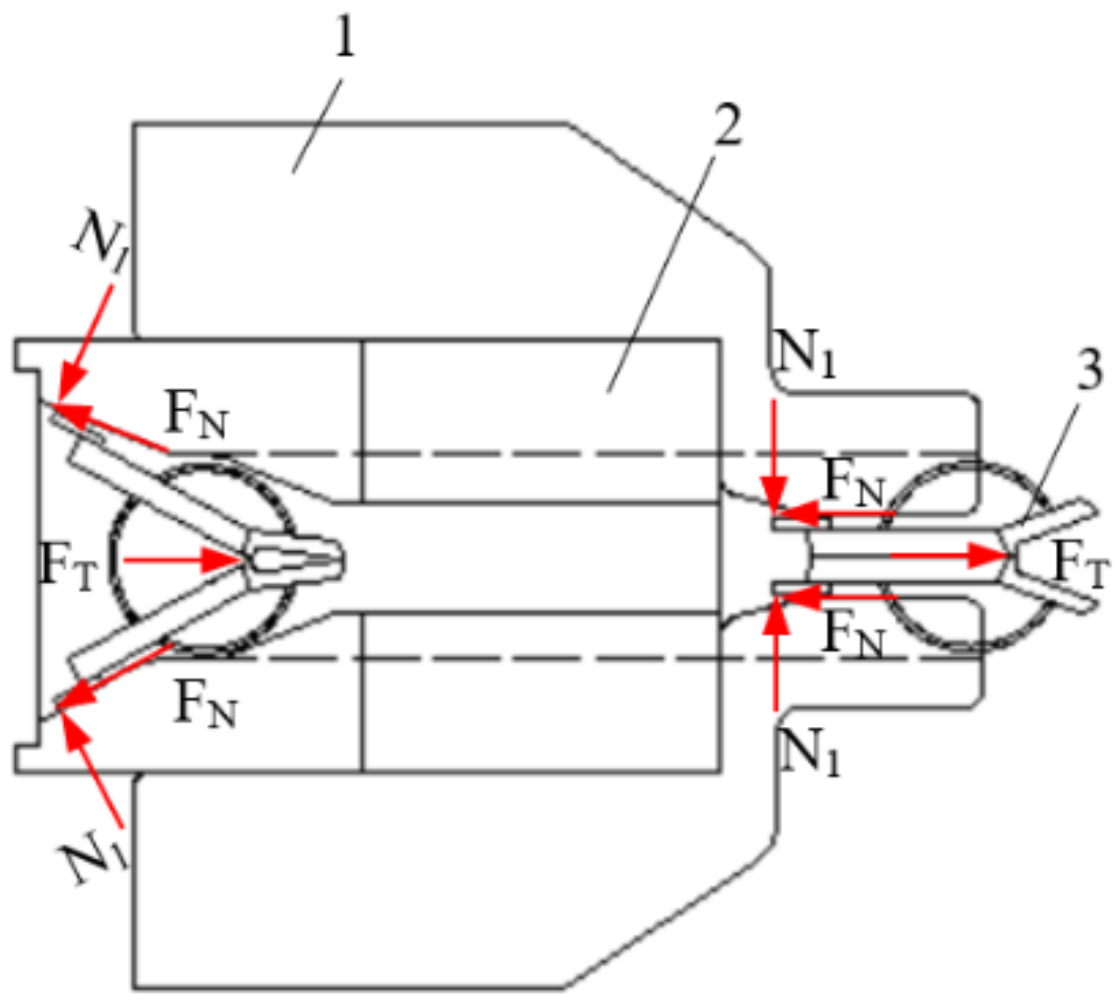
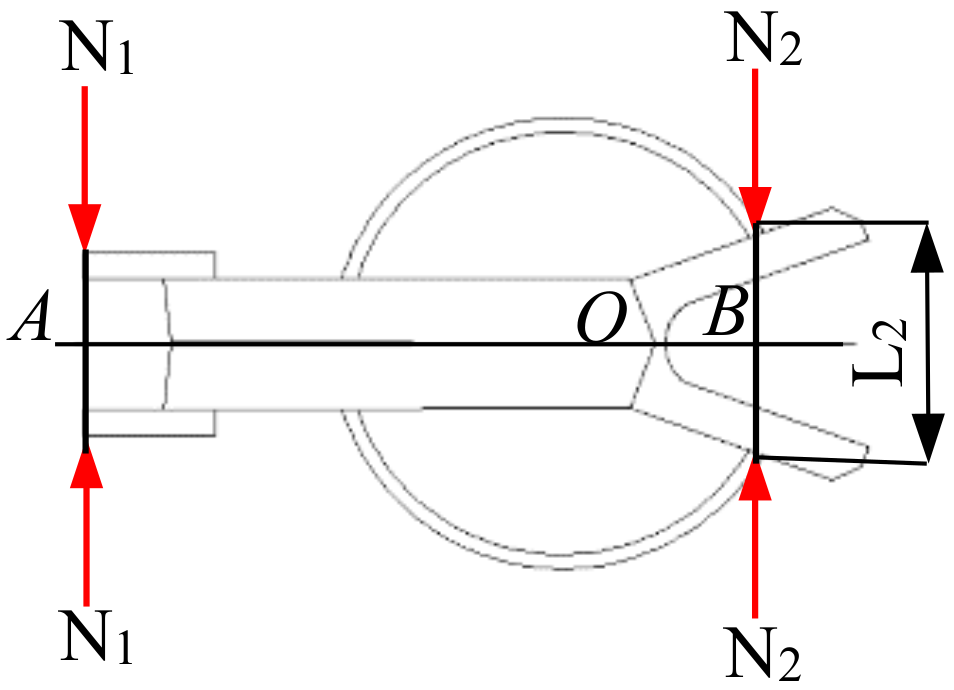
2.2. Modeling
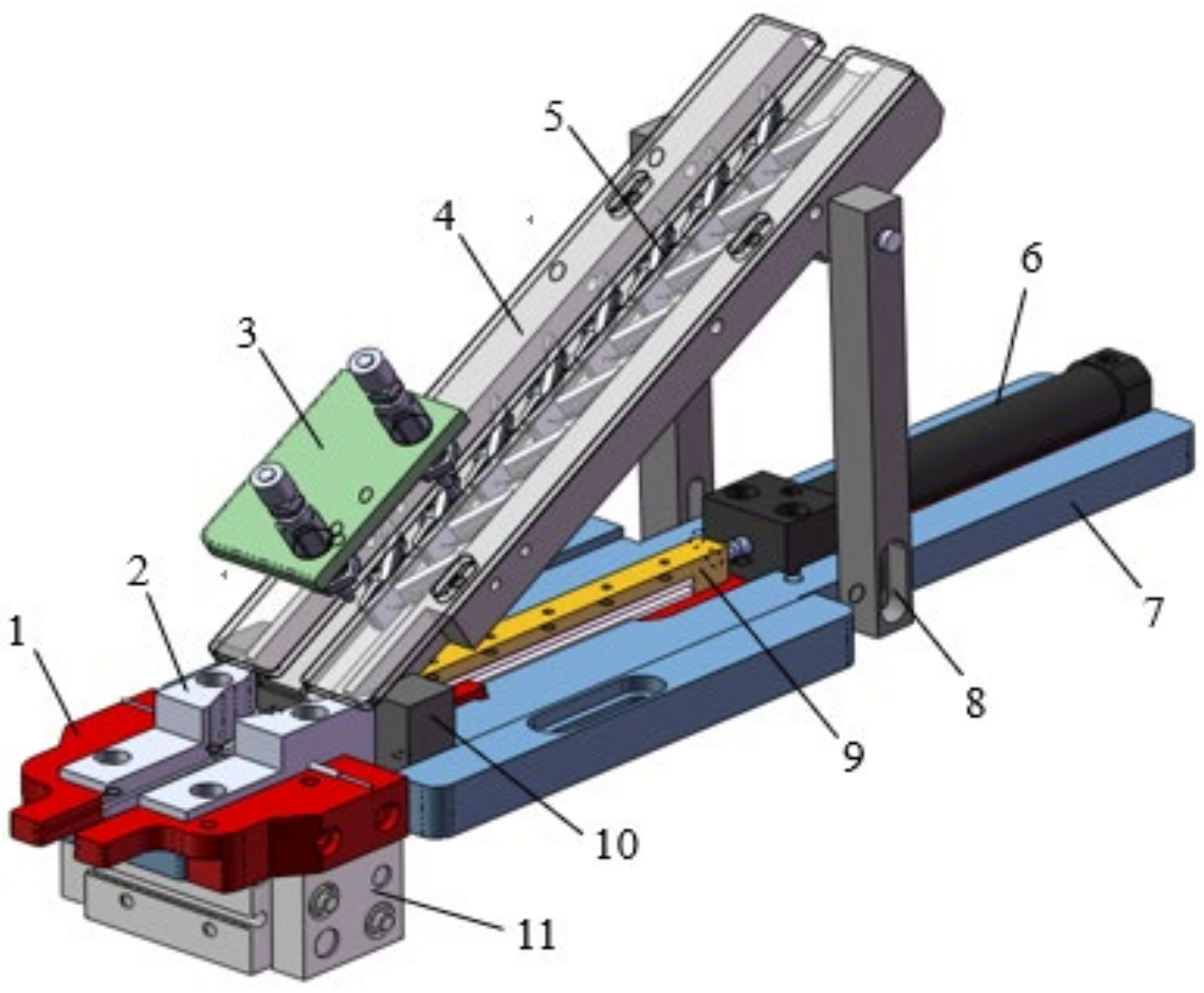
2.3. Automatic Clip-Feeding Mechanism
2.3.1. Structure and Working Principle
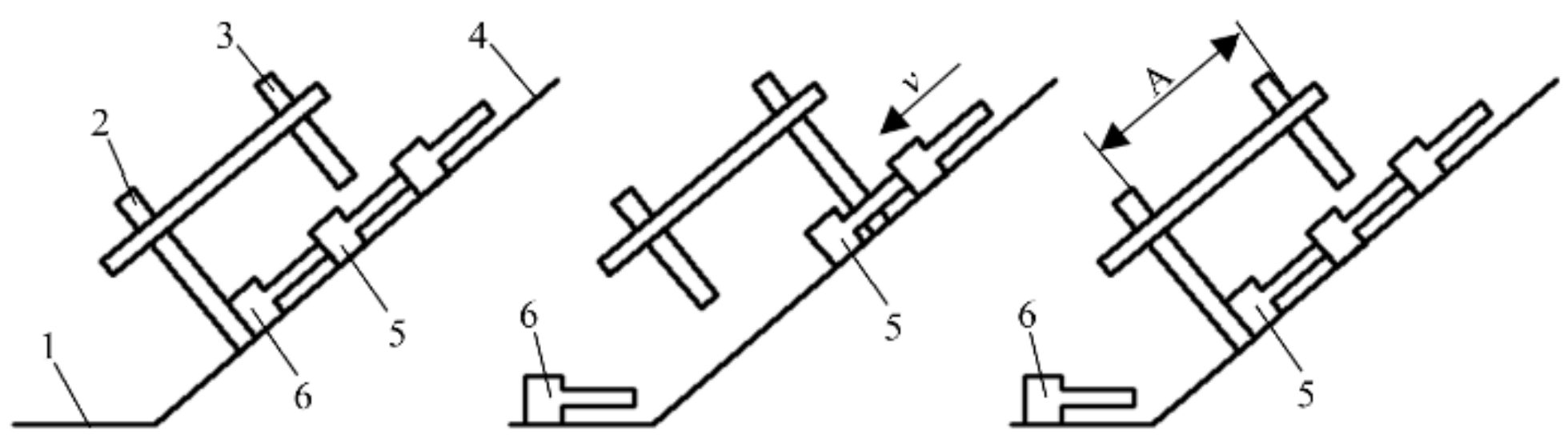
2.3.2. Design of the Clip Discharger Part
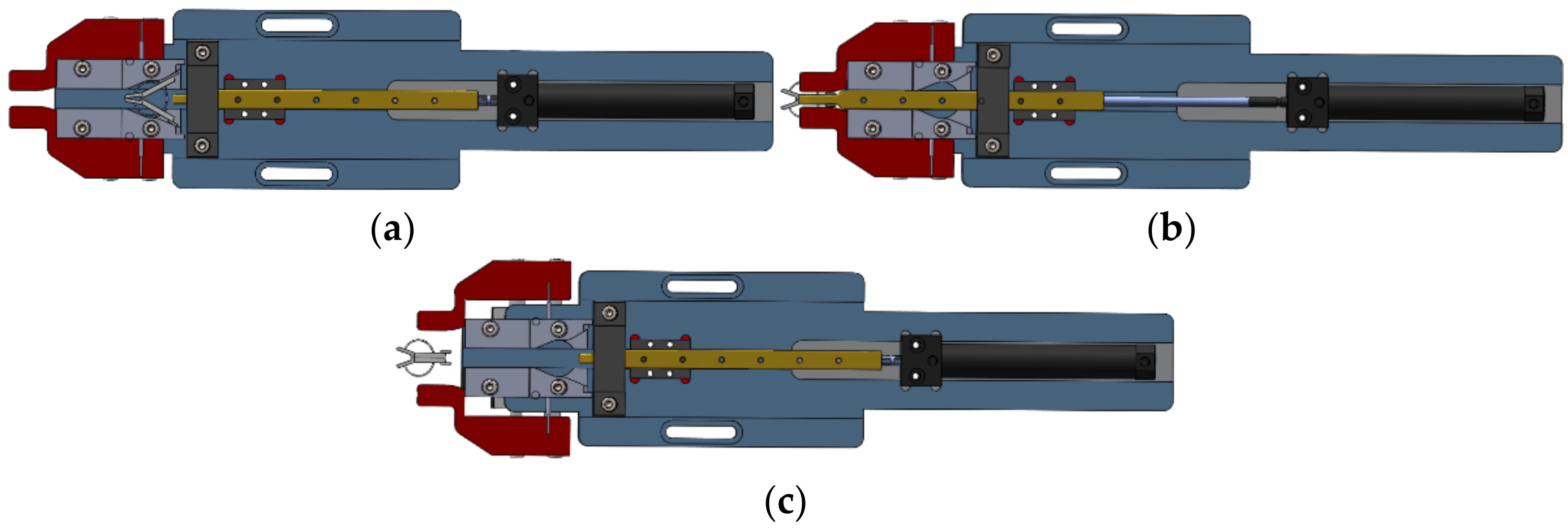
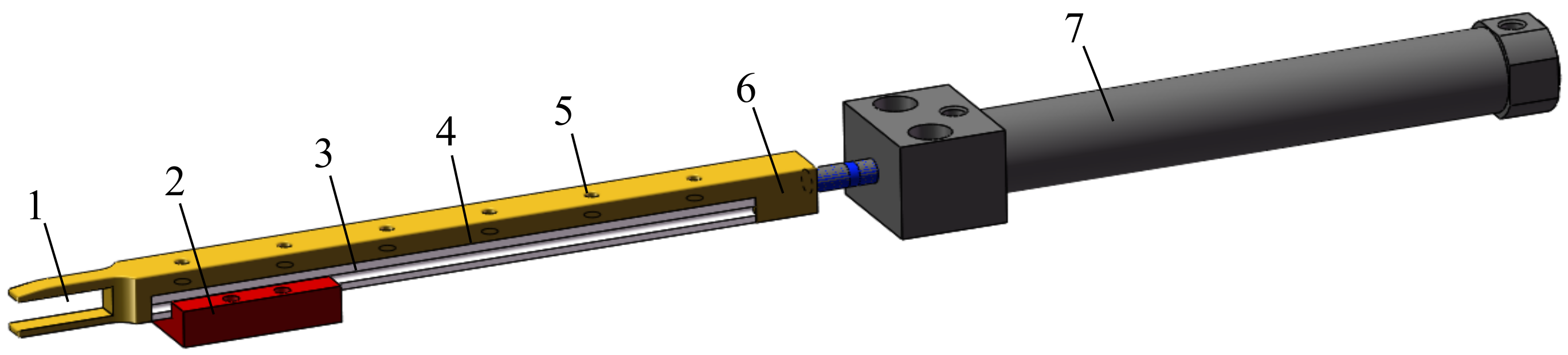
2.3.3. Design of the Clip-Pushing Part
2.4. Experiment and Methods
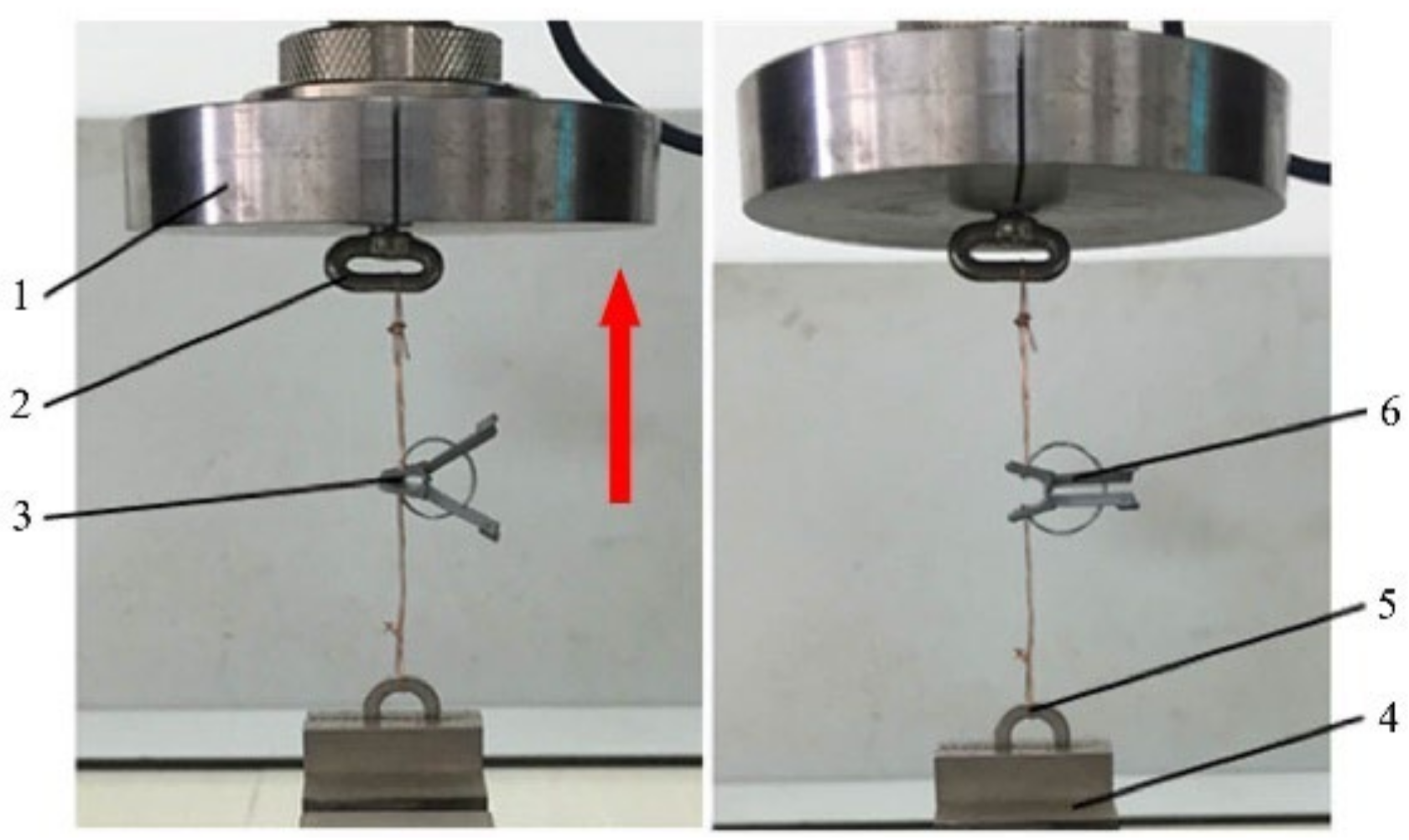
2.4.1. Model Validation
2.4.2. Experiment Clip-Feeding
3. Results and Discussion
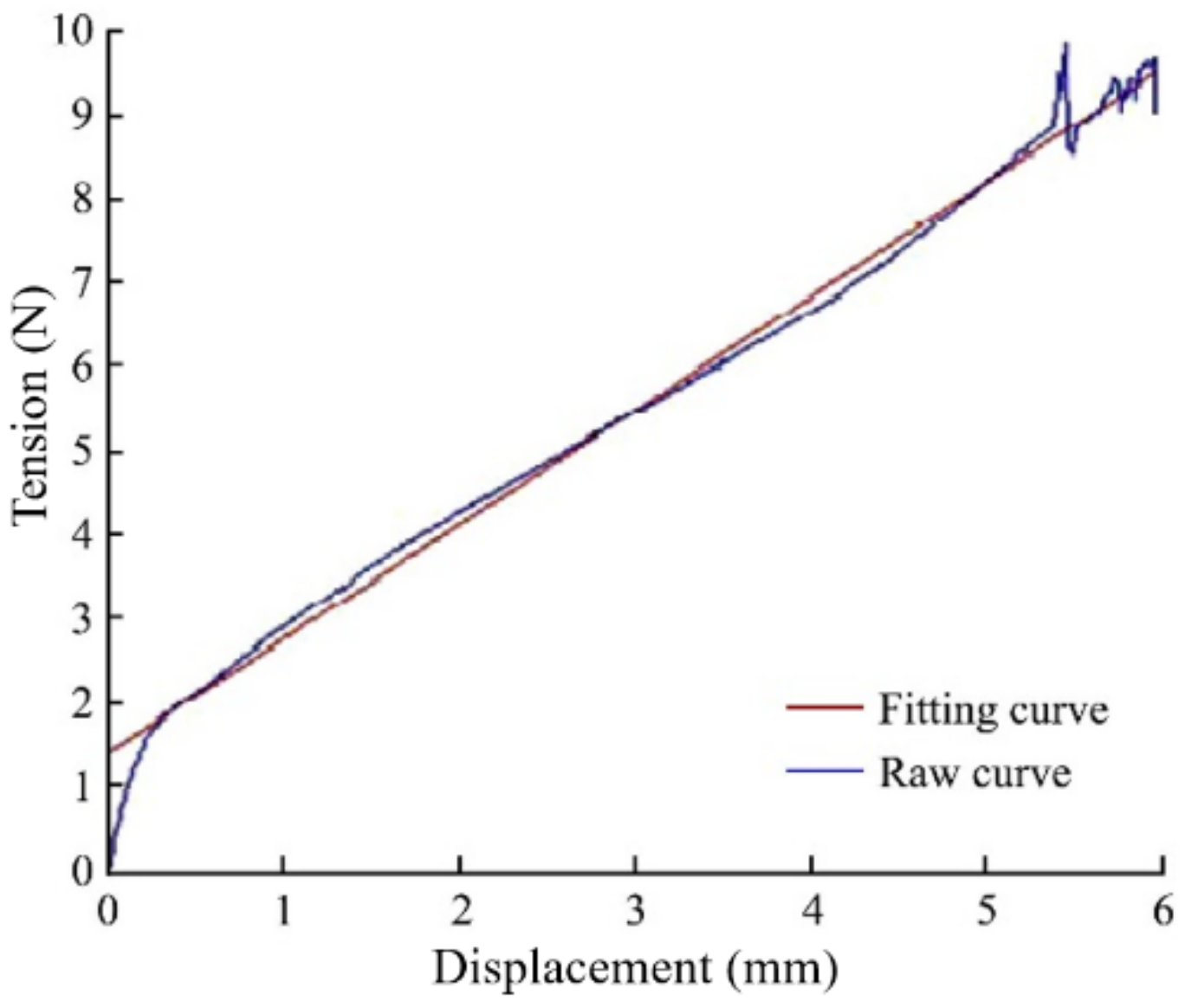
3.1. Model Validation
3.2. Experiment Clip-Feeding
4. Conclusions
- (1)
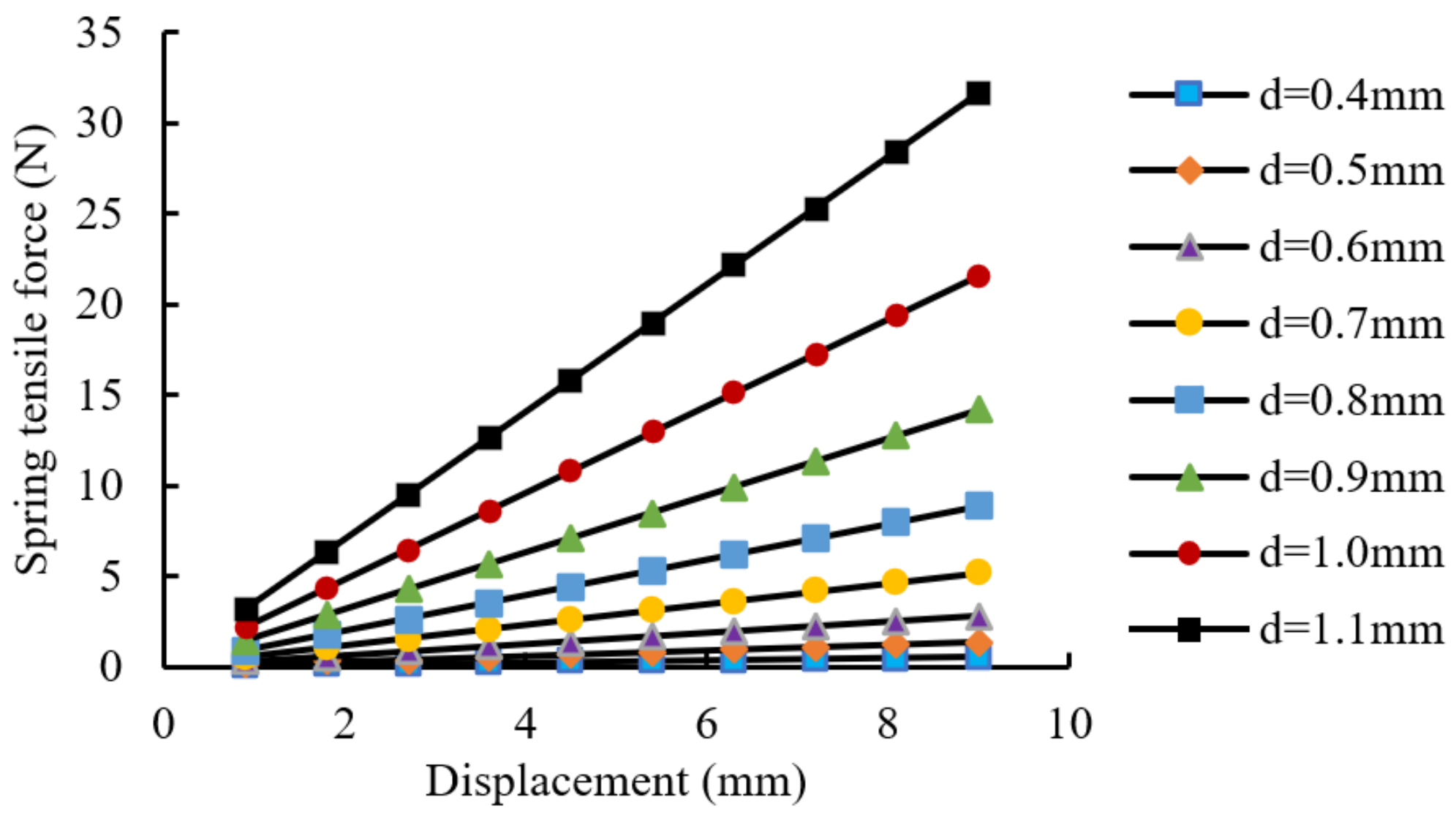
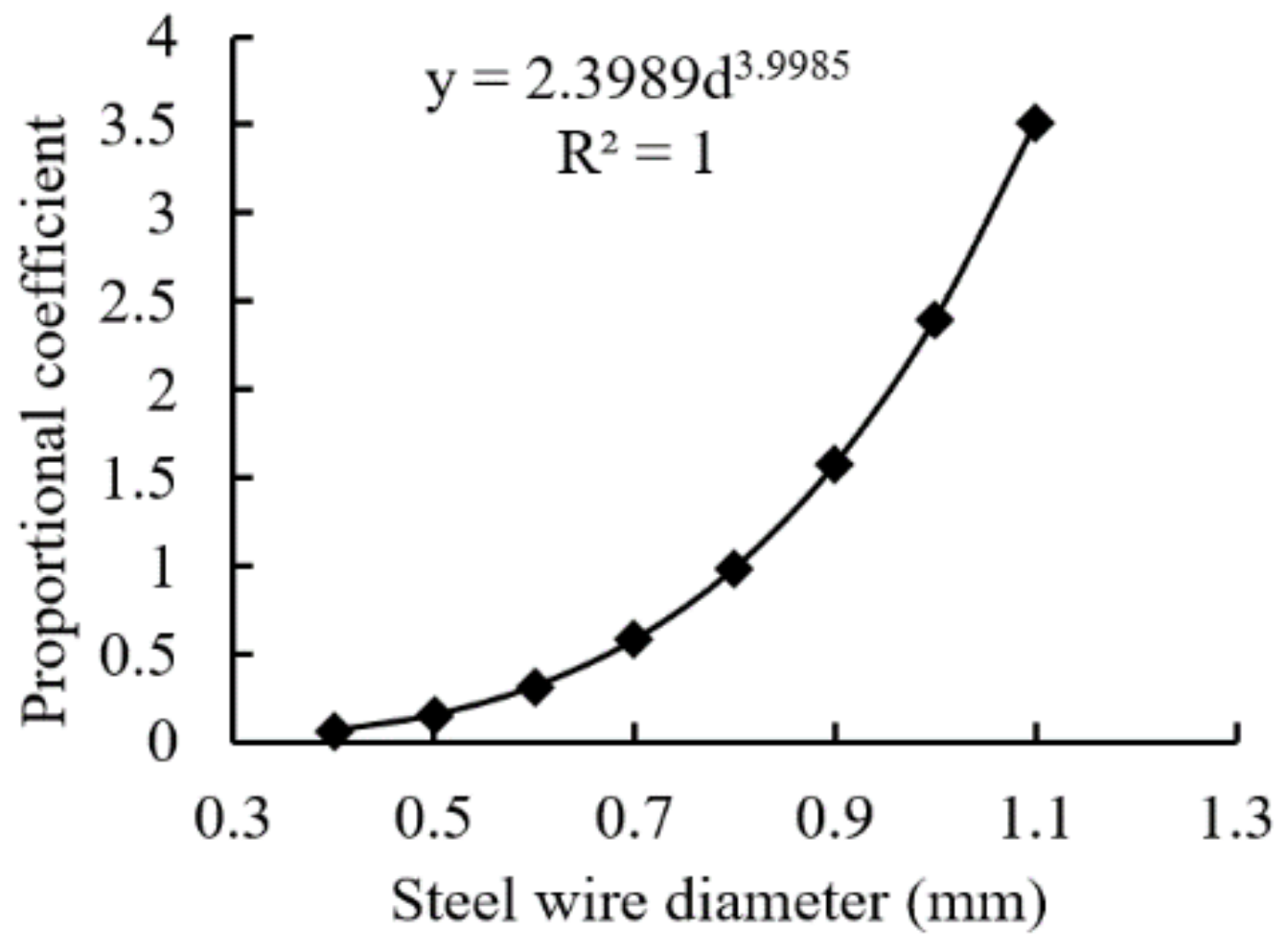
- The finite-element analysis method was applied in ABUQUS to build the clamping-force analysis model of the grafting clip, and the accuracy of the model was verified via mechanical tests on the grafting clip. The variation law of tensile load and clip-opening displacement of the steel ring with different steel wire diameters was obtained, and the tension equation of the steel ring was established. A testbed for the mechanical characteristics of tensile load on the grafting clip was built, and the regression equation between tensile load and clip-opening displacement was analyzed and obtained. Based on the analysis of grafted seedling safety and pressure resistance, and the analysis model of the grafting clip clamping force and the data of the tensile test on the clip, it is concluded that the grafting clip with a steel wire diameter of 0.7 mm was safe and reliable to clamp melon-grafted seedlings, and the grafting clip with a steel wire diameter of 0.8 mm had the risk of clip damage. This model can be used to analyze and calculate the mechanical characteristics of the grafting clip.
- (2)
- An automatic clip-feeding mechanism with a single-clip discharger was designed. The working principle and structural parameters of the clip discharger and pushing parts were analyzed, and the application point of the push rod to the grafting clip is more uniform, which solves the problem of damage on the grafting clip caused by uneven stress. The critical thrust on the grafting clip was 0.603 N, which provides a theoretical basis for improving the success rate of automatic clip-feeding.
- (3)
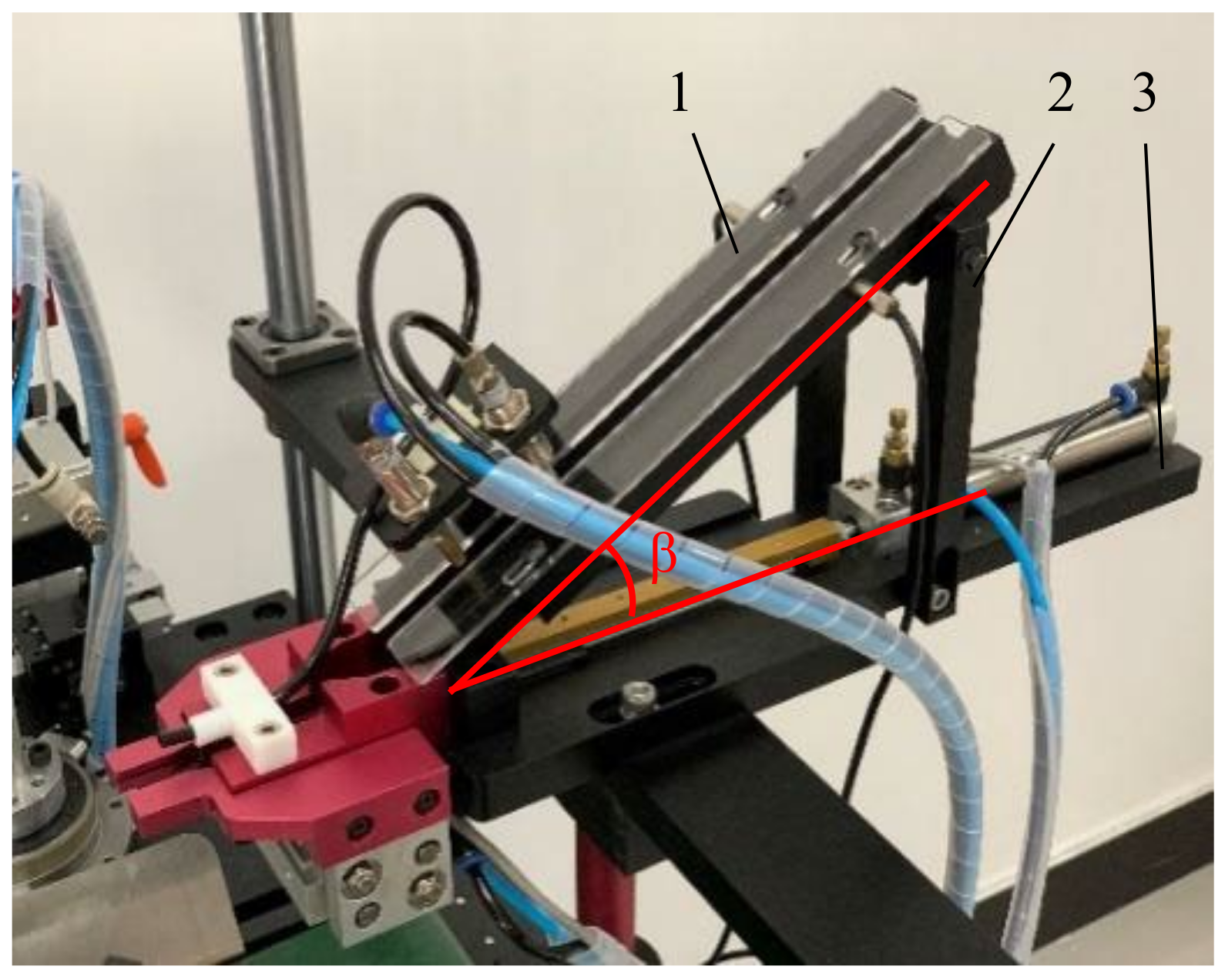
- The designed automatic clip-feeding mechanism was used to carry out the clip-feeding test, and the results show that the inclination angle of the row-discharging slideway is the main factor affecting the clip-feeding success rate, and the thrust from the clip-pushing cylinder had no significant influence on the clip-feeding success rate. When the inclination angle of the row-discharging slideway was 50° and the thrust from the clip-pushing cylinder was 8.04 N, the grafting clip stayed in a horizontal state after entering the clip-feeding delivery slideway from the row-discharging slideway, and the success rate of clip-feeding achieved 98.67%, which met the technical requirements of automatic grafting. The reason for the failure of clip-feeding is that the grafting clip ring does not enter the directional chute of the clip-feeding slideway chute, so it is necessary to further optimize the structure of the clip-feeding slideway.
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, C.J.; Lin, W.G.; Feng, C.R.; Wu, X.S.; Fu, X.H.; Xiong, M.; Bie, Z.L.; Huang, Y. A New Grafting Method for Watermelon to Inhibit Rootstock Regrowth and Enhance Scion Growth. Agriculture 2021, 11, 812. [Google Scholar] [CrossRef]
- Bantis, F.; Koukounaras, A.; Siomos, A.S.; Dangitsis, C. Impact of scion and rootstock seedling quality selection on the vigor of watermelon–interspecific squash grafted seedlings. Agriculture 2020, 10, 326. [Google Scholar] [CrossRef]
- Guan, W.J.; Zhao, X.; Hassell, R.; Thies, J. Defense Mechanisms Involved in Disease Resistance of Grafted Vegetables. Horticulture 2012, 47, 164–170. [Google Scholar] [CrossRef] [Green Version]
- Turhan, A.; Ozmen, N.; Kuscu, H.; Serbeci, M.S.; Seniz, V. Influence of rootstocks on yield and fruit characteristics and quality of watermelon. Hortic. Environ. Biotechnol. 2012, 53, 36–341. [Google Scholar] [CrossRef]
- Zhu, C.Y.; Yue, D.J. Production status and technology trend of vegetable seedling industry in China. Agric. Eng. Technol. 2019, 39, 34–38. [Google Scholar]
- Liu, M.C.; Ji, Y.H.; Wu, Z.H.; He, W.M. Current situation and development trend of vegetable seedling industry in China. China Veg. 2018, 11, 7. [Google Scholar]
- Wang, L. Current situation and development of factory seedling production in China. Agric. Eng. Technol. 2017, 37, 15–19. [Google Scholar]
- Jiang, K.; Wang, J.W.; Zhang, Q.; Li, C.L.; Wang, X. Mechanical characteristics analysis and test of a spring-loaded grafting clip. Int. Agric. Eng. J. 2018, 27, 61–72. [Google Scholar]
- Li, J.; Zhang, T.Z.; Chu, J.; Zhang, L.B.; Zhang, W.B.; Yin, Q. Design and Experiment of Grafting-clip Transporting Mechanism of Full Automatic Grafting Machine for Whole-row Vegetable Seedlings. Trans. Chin. Soc. Agric. Mach. 2017, 48, 14–20. [Google Scholar]
- Jiang, K.; Zhang, Q.; Wang, X.; Feng, Q.C.; Guo, R. Design for Automatic Sequencing and Supplying Device for Grafting Clips. Trans. Chin. Soc. Agric. Mach. 2012, 43, 256–261. [Google Scholar]
- Pardo-Alonso, J.L.; Carreño-Ortega, Á.; Martínez-Gaitán, C.C.; Fatnassi, H. Behavior of Different Grafting Strategies Using Automated Technology for Splice Grafting Technique. Appl. Sci. 2020, 10, 2745. [Google Scholar] [CrossRef]
- Zhang, K.L.; Chu, J.; Zhang, T.Z.; Yin, Q.; Kong, Y.S.; Liu, Z. Development Status and Analysis of Automatic Grafting Technology for Vegetables. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–13. [Google Scholar]
- Jiang, K.; Zheng, W.G.; Zhang, Q.; Guo, R.; Feng, Q.C. Development and experiment of vegetable grafting robot. Trans. Chin. Soc. Agric. Eng. 2012, 28, 8–14. [Google Scholar]
- Comba, L.; Gay, P.; Aimonino, D.R. Robot ensembles for grafting herbaceous crops. Biosyst. Eng. 2016, 146, 227–239. [Google Scholar] [CrossRef]
- ISO Group. Available online: http://www.iso-group.nl (accessed on 20 December 2021).
- Conic System. Available online: http://www.conic-system.com (accessed on 20 December 2021).
- Ohkoshi, T.; Kobayashi, K. Development of automatic seedling feeding device for cucurbits grafting robot (Part1)-Evaluation of automatic stock feeder. J. Jpn. Soc. Agric. Mach. Food Eng. 2013, 75, 100–107. [Google Scholar]
- Kobayashi, K.; Sasaya, S. Study on Automation of Seedlings Feeding for Grafting Robot for Cucurbitaceous Vegetables (Part2). Agric. Mach. Food Eng. 2007, 69, 70–77. [Google Scholar]
- Kang, D.H.; Lee, S.Y.; Kim, J.K.; Park, M.J.; Son, J.K.; Yun, S.W. Development of an Automatic Grafting Robot for Fruit Vegetables using Image Recognition. Prot. Hortic. Plant Fact. 2019, 28, 322–327. [Google Scholar] [CrossRef]
- Kim, H.M.; Hwang, S.J. Comparison of Pepper Grafting Efficiency by Grafting Robot. Prot. Hortic. Plant Fact. 2015, 24, 57–62. [Google Scholar] [CrossRef]
- Yang, L.; Liu, C.Q.; Zhang, T.Z. Design and experiment of vegetable grafting machine with double manipulators. Trans. Chin. Soc. Agric. Mach. 2009, 40, 175–181. [Google Scholar]
- Tian, S.B.; Yang, J.F.; Wang, R.L. Optimization experiment of operating parameters on vibration sorting-clip device for vegetable grafting machine. Trans. Chin. Soc. Agric. Eng. 2014, 30, 9–16. [Google Scholar]
- Xie, Z.J.; Gu, S.; Chu, Q.; Li, B.; Fan, K.J.; Yang, Y.L.; Yang, Y.; Liu, X.G. Development of a high -productivity grafting robot for Solanaceae. Int. J. Agric. Biol. Eng. 2020, 13, 82–90. [Google Scholar] [CrossRef]
- Gu, S.; Xie, Z.J.; Chu, Q.; Lv, Y.J.; Li, B.; Hu, J.S.; Peng, Y.P. A Multi-Channel Conveying Device for Elastic Fixing Clip; Application Number: 201611167450.5; China National Intellectual Property Administration: Guangzhou, China, 2016.
- Jiang, K.; Chen, L.P.; Feng, Q.C.; Zhang, Q.; Cao, L.L. Mechanical grafting characteristics of melon seedlings. Int. Agric. Eng. J. 2020, 29, 250–257. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Parameters |
|---|---|
| Structure | Unitary |
| Material | PP |
| Diameter of detachable coils D (mm) | 15.0 |
| Diameter of steel wire d (mm) | 0.7 |
| Clip hold seeding length L (mm) | 10.0 |
| Thickness of the back of clip S (mm) | 2.18 |
| Width of the back of clip C (mm) | 5.15 |
| Clip hold cross-range of initial clipping position B0 (mm) | 1.37 |
| Initial cross-range of the back of clip E (mm) | 26.0 |
| Clip mass (g) | 1.0 |
| Friction coefficient between clip and slideway μ | 0.364 |
| Items | Parameters |
|---|---|
| Materials | 304 stainless steel |
| Poisson’s ratio v | 0.3 |
| Elastic modulus (MPa) | 194,020 |
| Yield strength σ0.2 (MPa) | 205 |
| Tensile strength σb (MPa) | 520 |
| Density ρ (g·cm−3) | 7.93 |
| Displacement ΔL | Tensile Load F (N) | |||||||
|---|---|---|---|---|---|---|---|---|
| D = 0.4 mm | D = 0.5 mm | D = 0.6 mm | D = 0.7 mm | D = 0.8 mm | D = 0.9 mm | D = 1.0 mm | D = 1.1 mm | |
| 0.9 | 0.055335 | 0.135074 | 0.280045 | 0.518721 | 0.884724 | 1.416810 | 2.158850 | 3.159820 |
| 1.8 | 0.110669 | 0.270148 | 0.560090 | 1.037440 | 1.769450 | 2.833620 | 4.317700 | 6.319640 |
| 2.7 | 0.166003 | 0.405222 | 0.840135 | 1.556160 | 2.654170 | 4.250430 | 6.476550 | 9.479460 |
| 3.6 | 0.221338 | 0.540296 | 1.120180 | 2.074880 | 3.538890 | 5.667240 | 8.635400 | 12.639300 |
| 4.5 | 0.276672 | 0.675370 | 1.400220 | 2.593600 | 4.423620 | 7.084050 | 10.794300 | 15.799100 |
| 5.4 | 0.332007 | 0.810444 | 1.680270 | 3.112320 | 5.308340 | 8.500860 | 12.953100 | 18.958900 |
| 6.3 | 0.387341 | 0.945518 | 1.960310 | 3.631040 | 6.193060 | 9.917670 | 15.112000 | 22.118700 |
| 7.2 | 0.442676 | 1.080590 | 2.240360 | 4.149770 | 7.077790 | 11.334500 | 17.270800 | 25.278500 |
| 8.1 | 0.498010 | 1.215670 | 2.520400 | 4.668490 | 7.962510 | 12.751300 | 19.429700 | 28.438400 |
| 9.0 | 0.553345 | 1.350740 | 2.800450 | 5.187210 | 8.847240 | 14.168100 | 21.588500 | 31.598200 |
| Test Object | Diameter of Grafted Seedlings (mm) | Safety-Pressure Resistance (N) | Displacement Variable ΔL (mm) | Simulated Clamping Force (N) | Tested Clamping Force (N) | ||
|---|---|---|---|---|---|---|---|
| Clip Opening | Steel Ring | D = 0.7 mm | D = 0.8 mm | D = 0.7 mm | |||
| Grafted cucumber seedlings | 3.12 ± 0.10 | 3.31 ± 0.12 | 1.75 | 3.375 | 1.94 | 3.32 | 2.58 |
| Grafted watermelon seedlings | 2.86 ± 0.12 | 3.73 ± 0.15 | 1.49 | 3.245 | 1.87 | 3.19 | 2.41 |
| No. | Inclination Angle of Discharging Slideway (°) | Clip-Pushing Cylinder Thrust (N) | Input Air Pressure of Clip-Pushing Cylinder (MPa) | Success Rate of Clip-Feeding (%) |
|---|---|---|---|---|
| 1 | 30 | 6.03 | 0.3 | 82.33 |
| 2 | 30 | 8.04 | 0.4 | 83.67 |
| 3 | 30 | 10.05 | 0.5 | 84.33 |
| 4 | 40 | 6.03 | 0.3 | 92.00 |
| 5 | 40 | 8.04 | 0.4 | 93.00 |
| 6 | 40 | 10.05 | 0.5 | 92.33 |
| 7 | 50 | 6.03 | 0.3 | 96.33 |
| 8 | 50 | 8.04 | 0.4 | 98.67 |
| 9 | 50 | 10.05 | 0.5 | 98.00 |
| Difference Source | Sum of Squares | Df | Mean Square | F–Value | Significance |
|---|---|---|---|---|---|
| Inclination angle of discharging slideway | 310.58 | 2 | 155.29 | 501.73 | 18.00 (α = 0.01) |
| Thrust by the clip-pushing cylinder | 4.26 | 2 | 2.13 | 6.89 | 6.94 (α = 0.05) |
| Error | 1.24 | 4 | 0.31 | ||
| Total | 316.08 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, K.; Guo, W.; Chen, L.; Huang, W.; Ge, Y.; Wei, X. Design and Experiment of Automatic Clip-Feeding Mechanism for Vegetable-Grafting Robot. Agriculture 2022, 12, 346. https://doi.org/10.3390/agriculture12030346
Jiang K, Guo W, Chen L, Huang W, Ge Y, Wei X. Design and Experiment of Automatic Clip-Feeding Mechanism for Vegetable-Grafting Robot. Agriculture. 2022; 12(3):346. https://doi.org/10.3390/agriculture12030346
Chicago/Turabian StyleJiang, Kai, Wenzhong Guo, Liping Chen, Wenqian Huang, Yiyuan Ge, and Xiaoming Wei. 2022. "Design and Experiment of Automatic Clip-Feeding Mechanism for Vegetable-Grafting Robot" Agriculture 12, no. 3: 346. https://doi.org/10.3390/agriculture12030346